Комиссарчик В.Ф. Автоматическое регулирование технологических процессов
Подождите немного. Документ загружается.

71
достоинствами: хорошо сочетается с методом РЧХ; легко поддается
алгоритмизации; позволяет исследовать системы с чистым запаздыванием.
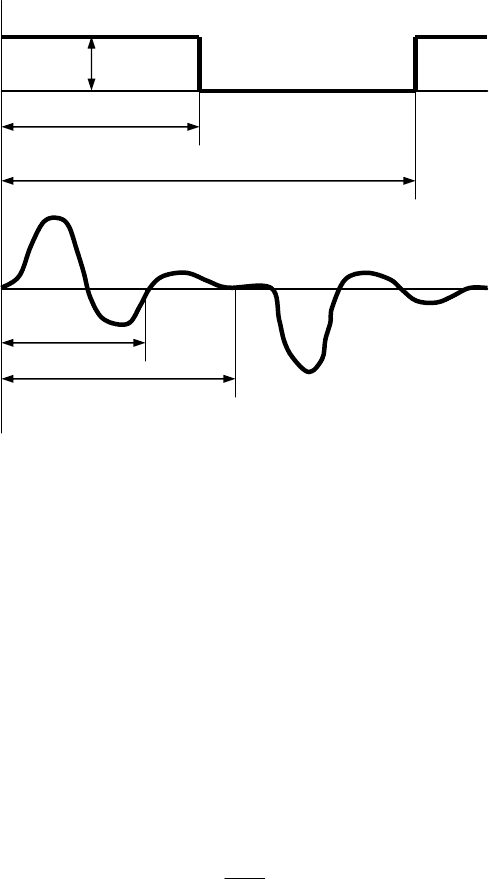
Пусть на вход АСР подается воздействие типа прямоугольная волна
с амплитудой
x
0
и периодом Т
0
(рис. 32).
Предположим, что длительность полуволны
t
П
превышает время
переходного процесса в замкнутой АСР
t
p
:
ppП
TtTt 35.0
0
≈
≥
=
(
Т
р
– период колебаний переходного процесса).
При
9.075.0 ÷=
ψ
за 3Т
р
амплитуда колебаний уменьшается в 12÷30
раз.
Переходя в (60) к частотам, получаем:
6
0
р
ω
ω
≤
,
где
ω
р
=2
π
/Т
р
– рабочая частота системы (частота колебаний в переходном
процессе),
ω
0
=2
π
/Т
0
– частота прямоугольной волны.
x
y
x
0
To
t
t
t
П
t
р
T
p
Рис. 32.
(60)
(61)
72
При расчете настроек регуляторов методом РЧХ рабочая частота
ω
р
определяется в точке ЛРЗ, которой соответствуют оптимальные настройки
регулятора.
Воздействие типа прямоугольная волна можно разложить в ряд
Фурье:
++++= L)5sin(
5
1
)3sin(
3
1
)sin(
2
2
)(
000
00
ttt
хх
tх
ωωω
π
Напомним, что при подаче на вход АСР с АЧХ
А
ЗС
(
ω
) и ФЧХ
ϕ
ЗС
(
ω
)
гармонического сигнала
)sin()(
0max
txtx
ω
=
на её выходе также возникает гармонический сигнал
[
]
)(sin)()(
00max0
ω
ϕ
ω
ω
ЗСЗС
txAty
+
=
.
Тогда согласно принципу суперпозиции реакция АСР на воздействие
(62) может быть записана в виде
[]
{
[] []
++++
+++=
L)5(5sin
5
1
)5()3(3sin
3
1
)3(
)(sin)(
2
2
)0()(
000000
000
00
ωϕωωωϕωω
ωϕωω
π
ЗСЗСЗСЗС
ЗСЗСЗС
tAtA
tA
xx
Aty
Приемлемая точность расчетов достигается при использовании в
формуле (63) 15
÷25 слагаемых (Практически вычисления продолжаются
до тех пор, пока очередное слагаемое не становиться достаточно малым).
Выражение (63) справедливо в пределах
0
0
2
0
ω
π
=≤≤
T
t
и позволяет определить переходной процесс в замкнутой АСР. Из этого
выражения следует, что для построения переходной характеристики АСР
необходимо знать массив значений АЧХ и ФЧХ замкнутой системы для
частот
ω
0
, 3
ω
0
, 5
ω
0
и т.д. (т.е. нечетных гармоник разложения).
(62)
(63)
73
4. Анализ АСР с релейными регуляторами [4]
Системы с релейными регуляторами относятся к классу нелинейных
АСР. Их точный расчет возможен лишь в простейших случаях. В общем
случае расчет нелинейных АСР производится приближенно в два этапа:
линеаризация статической характеристики нелинейного элемента и расчет
линеаризованной АСР.
Установившимся режимом работы АСР с релейными регуляторами
(релейных АСР) чаще всего является режим автоколебаний. Поэтому в
отличие от непрерывных линейных АСР основными показателями
качества регулирования в этом случае являются параметры автоколебаний:
период
Т
а
или частота
ω
а
и амплитуда А
а
. В качестве установившегося
значения регулируемой величины условно можно принять среднее
значение
y
ср
= y
уст
. Тогда ошибка регулирования в установившемся режиме
равна разности между заданным значением регулируемой величины и её
средним значением:
задсруст
yyy
−
=
∆
.
Целью расчета релейных АСР является выбор настроечных
параметров релейного регулятора, обеспечивающих заданные требования
к показателям качества
Т
а
, А
а
,
∆
y
уст
.
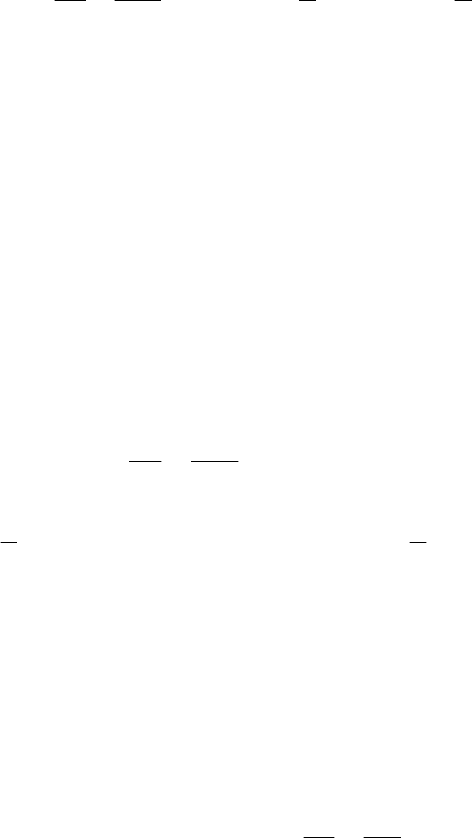
Структурная схема релейной АСР приведена на рис. 33.
Здесь: РЭ – релейный элемент (регулятор).
РЭ
W
об
(р)
y
зад
F
x
y
Рис. 33.

74
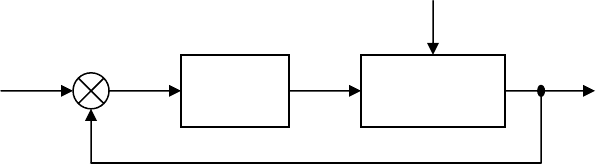
4.1. Анализ АСР с двухпозиционным релейным регулятором
Статическая характеристика двухпозиционного релейного
регулятора приведена на рис. 34а,б. Отличие рис. 34а от рис. 34б
заключается в том, что на рис. 34а по оси абсцисс отложено значение
регулируемой переменной
y, а на рис. 34б – рассогласование
∆
y=y
зад
–y.
Как видно из характеристики двухпозиционного регулятора,
регулирующее воздействие в зависимости от величины рассогласования
∆
y
может принимать два фиксированных значения:
x
max
и x
min
(В частном
случае
x
min
=0). Диапазон изменения регулируемой переменной
(рассогласования) можно разбить на три зоны: мало, нормально, много.
Будем считать, что величина зоны нормально (называемой также зоной
возврата или дифференциалом) составляет 2
ε.
Уравнение статической характеристики двухпозиционного
регулятора:
∆
y
x
x
max
x
min
2
ε
y
зад
норма мало много
y
а) x
x
max
x
min
ε
y
зад
б)
норма много мало
ε
Рис.34.
75
><∆<−
−<∆
<<∆<−
>∆
=
0
0
min
max
yиyили
yприx
yиyили
yприx
x
εε
ε
εε
ε
Настроечными параметрами двухпозиционного релейного
регулятора являются:
ε
, а также x
max
и x
min
, если они не заданы.
Будем считать, что объект регулирования описывается моделью
инерционного звена первого порядка с чистым запаздыванием (8).
Рассмотрим вначале частный случай при отсутствии чистого
запаздывания в объекте регулирования.
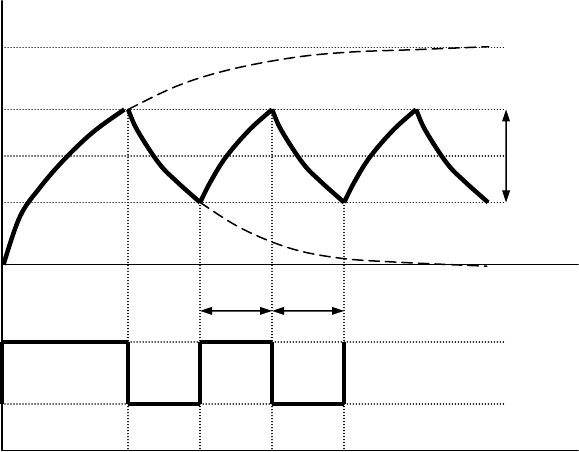
На рис. 35 изображены графики автоколебаний и изменения
регулирующего воздействия.
Здесь
y
max
и y
min
– максимальное и минимальное установившееся
значение регулируемой переменной, соответствующие максимальному
x
max
и минимальному
x
min
значениям регулирующего воздействия и связанные с
ним через коэффициент передачи объекта регулирования:
minmin
maxmax
Kxy
Kxy
=
=
t
2
ε
t
y
max
y
зад
+
ε
y
зад
y
min
y
зад
-
ε
x
max
x
min
x
y
T
max
T
min
t
1
t
2
t
3
t
4
A
B
C
Рис. 35..

76
Разность
minmax
yyD
−
=
будем называть диапазоном регулирования.
Пусть начальное значение регулируемой величины
y(0)=y
min
.
Поскольку при этом
∆
y>
ε
, регулирующее воздействие принимает
максимальное значение (
x=x
max
), и объект начинает разгоняться по кривой
разгона – экспоненте. При достижении регулируемой переменной
значения
y
зад
+
ε
(
∆
y=-
ε
) в момент t
1
регулирующее воздействие
переключается на
x
min
, и регулируемая переменная начинает уменьшаться.
При
t=t
2
∆
y=
ε
и регулирующее воздействие снова переключается на x
max
.
Далее система входит в режим установившихся колебаний. Амплитуда
автоколебаний равна половине зоны возврата статической характеристики
регулятора:
ε
=
а
А
.
Среднее значение автоколебаний равно заданному значению:
y
ср
=y
зад
, следовательно, ошибка
∆
y
уст
в установившемся режиме равна
нулю.
Найдем теперь период автоколебаний
Т
а
.
maxmin
TTТ
а
+
=
,
где
T
min
и T
max
– промежутки времени, в течение которых регулирующее
воздействие имеет соответственно минимальное и максимальное значения.
Уравнение участка экспоненты от произвольной точки
t=t
0
, y
0
=y(t
0
):
)1)(()(
0
000
T
tt
eyyytty
−
−
∞
−−+=−
,
где
Y
∞
- установившееся значение при t
→∞
.
С учетом (66) для переднего фронта автоколебаний
АВ (рис. 35)
можно записать:
(64)
(65)
(66)
77
)1)(()()(
2
max2
T
tt
задзад
eyyytty
−
−
−+−+−=−
εε
Записывая (67) для моментов
t
2
и t
3
и вычитая полученные
выражения друг из друга, находим:
)1)((2
max
max
T
T
зад
eyy
−
−+−=
εε
,
откуда
ε
ε
−−
+
−
=
зад
зад
yy
yy
TT
max
max
max
ln
.
Аналогично для заднего фронта автоколебаний
ВС справедливо
выражение:
)1)(()()(
3
min3
T
tt
задзад
eyyytty
−
−
−−+−+=−
εε
.
Поступая с выражением (70) так же, как с (67), получаем
)1)((2
min
min
T
T
зад
eyy
−
−+−=
εε
,
откуда
ε
ε
−−
+
−
=
min
min
min
ln
yy
yy
TT
зад
зад
Подставляя (69) и (72) в (65), находим
−−
+−
+
−−
+−
=
ε
ε
ε
ε
min
min
max
max
lnln
yy
yy
yy
yy
TT
зад
зад
зад
зад
a
При приближенных расчетах формулу (73) можно упростить,
линеаризуя функцию
−
+
x
x
1
1
ln
разложением в степенной ряд:
)1 (2
53
2
1
1
ln
53
<<≈
+++=
−
+
xприx
xx
x
x
x
L
С учетом (74) (73) можно записать в виде:
(67)
(68)
(69)
(70)
(71)
(72)
(73)
(74)
78
−
+
−
≈
minmax
2
yyyy
ТТ
задзад
а
εε
или окончательно
()()
minmax
minmax
2
yyyy
yy
TТ
задзад
a
−−
−
≈
ε
(75)
При
y
зад
≥
y
max
-
ε
T
max
, как видно из (69), а следовательно, и T
a
=
∞
.
Аналогично, при
y
зад
≤
y
min
+
ε
T
min
на основании (72), а значит, и T
a
также
становятся бесконечными. Это объясняется тем, что для возникновения
автоколебаний рассогласование должно попеременно изменять свой знак
на противоположный и превышать по амплитуде половину зоны возврата.
При выполнении же приведённых выше условий знак рассогласования
остаётся постоянным (регулятору как бы не хватает запаса регулирующего
воздействия). Поэтому для обеспечения нормальной работы
двухпозиционного регулятора заданное значение регулируемой величины
должно лежать в средней части диапазона регулирования:
DyyDy
зад
25,025,0
maxmin
−
≤
≤
+
(76)
Поскольку неравенство (76) должно выполняться при любых
значениях возмущений, влияющих на величину
y
min
и y
max
, значения x
min
и
x
max
должны быть выбраны с определённым запасом.
В случае, когда задание точно соответствует середине диапазона
регулирования:
22
maxmin
min
yyD
yy
зад
+
=+=
,
период автоколебаний достигает своего минимального значения
D
T
D
D
TT
а
ε
ε
ε
8
21
21
ln2
min
≈
−
+
=
.
При этом
2
minminmax а
TTT
=
=
,
79
т.е. имеют место симметричные автоколебания (длительность переднего
фронта равна длительности заднего фронта). При смещении
y
зад
вправо или
влево от середины диапазона регулирования период автоколебаний растёт
за счёт роста
T
max
или T
min
соответственно. При этом Т
а
зависит только от
величины приращения заданного значения относительно середины
диапазона регулирования и не зависит от его знака.
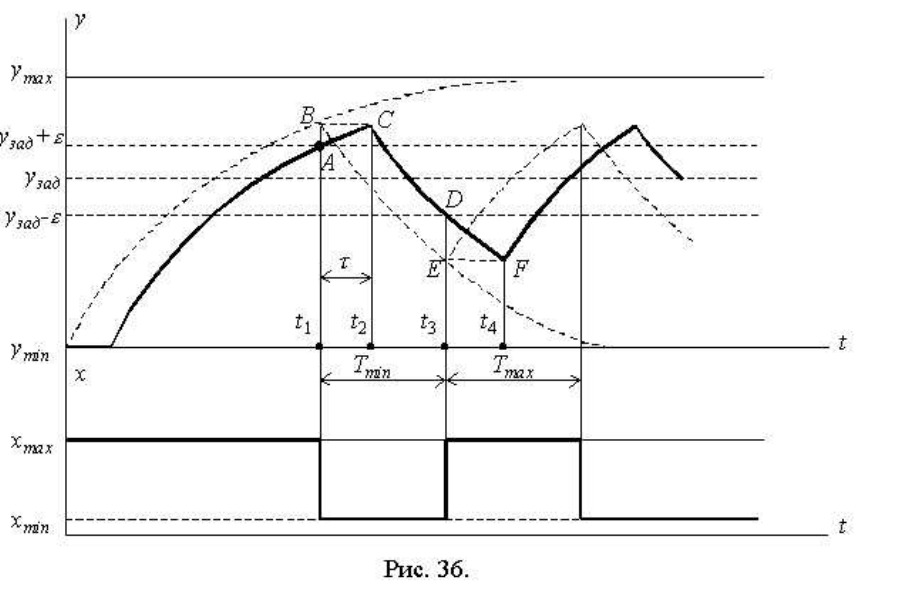
Перейдём теперь к общему случаю при наличии чистого
запаздывания в модели объекта регулирования. Графики автоколебаний и
регулирующего воздействия для этого случая приведены на рис. 36.
Наличие запаздывания в передаточной функции объекта приводит к
отставанию регулируемой переменной на величину
τ
(штриховая и
сплошная линии на рис. 36). Вследствие этого моменты переключения
регулирующего воздействия также сдвигаются на
τ
, что приводит к
возрастанию амплитуды и периода автоколебаний.
Уравнение участка АС переходной характеристики:
80
()( )( )
−−−++=−
−
−
T
tt
задзад
eyyytty
1
max1
1
εε
Поступая так же, как и выше, находим
()
−−−=
−
T
зад
eyyAB
τ
ε
max
1
(77)
Уравнение участка
DF:
()( )( )
−−−−−=−
−
−
T
tt
задзад
eyyytty
3
min3
1
εε
,
откуда
()
−−−=
−
T
зад
eyyDE
τ
ε
min
1
(78)
Амплитуда автоколебаний:
−−
−+=
+
+=
−
2
2
1
2
minmax
ε
εε
τ
yy
e
DEAB
A
T
a
,
или после преобразований:
−+=
−−
TT
a
e
D
eA
ττ
ε
1
2
(79)
Отметим, что при
τ
=0 выражение (79), как и следовало ожидать,
вырождается в (64).
Упрощённую формулу для амплитуды автоколебаний (79) можно
получить, используя линейную аппроксимацию экспоненциальной
функции
(
)
xe
x
+≈ 1
:
T
D
A
a
τ
ε
2
+≈
(80)
Как видим из (79), амплитуда
А
а
не зависит от y
зад
(так как
приращения
AB и DE при изменении y
зад
компенсируют друг друга, т.е.
AB+DE=const) и пропорциональна
ε
и D.