Klir G.J. Uncertainity and Information. Foundations of Generalized Information Theory
Подождите немного. Документ загружается.


less complex than simplifications Z
1
, Z
2
, Z
3
. Among them, simplification Z
4
has
the smallest diagnostic uncertainty, S(Y | X
4
) = 0.822. The loss of information
with respect to Z is
and with respect to Z
1
:
The solution set (including the given system Z) is:
EXAMPLE 9.2. A relation R among variables x
1
, x
2
, x
3
is defined by the set
of possible triples listed in Table 9.2a. Observe that the state sets of the vari-
ables are, respectively, X
1
= {0, 1} and X
2
= X
3
= {0, 1, 2}. The relation may be
utilized for providing us with useful information about the state of any one of
the variables, given a joint state of the remaining two variables. Relevant
amounts of uncertainty for this purpose, which are expressed in this case by
the Hartley functional, are shown in Table 9.2b under the heading R. Also
shown in the table are the associated amounts of information.
The aim of this example is to illustrate the role of the principle of minimum
uncertainty in choosing simplifications based on the quantization of variables
x
2
and x
3
. Assuming that the states in X
2
and X
3
are ordered, each of the sets
can be quantized by using one of the following functions:
When we apply function q
1
to both X
2
and X
3
in relation R, we obtain the sim-
plified relation R
11
shown in Table 9.2a, where duplicate states are crossed out.
By applying the other combinations of functions q
1
and q
2
, we obtain the other
simplified relations in Table 9.2a (R
12
, R
21
, and R
22
), where each subscript indi-
cates the combination employed. For each of the four simplified relations, rel-
evant amounts of uncertainty and information are given in Table 9.2b. Observe
that the simplifications with the minimum amount of uncertainty (indicated
in the table by bold entries) are also correctly the ones with the maximum
amount of information (or with minimum loss of information with respect to
R). For variable x
1
, any of relations R
12
, R
21
, and R
22
qualifies as the best sim-
plification; for variable x
2
, R
11
is the only minimum-uncertainty simplification;
for x
3
, both R
21
and R
22
are minimum-uncertainty simplifications. Observe that
R
12
does not preserve any information of R with respect to variable x
3
.
qq
12
00 00
10 11
21 21
::
.
ÆÆ
ÆÆ
ÆÆ
SOL
Z
ZZ Z=
{}
,, .
14
IY X IY X
14
0 103
()
-
()
= ..
IY X IY X
()
-
()
=
4
0 155.,
362 9. METHODOLOGICAL ISSUES
Table 9.2. Preferred Simplification Determined by the Principle of Minimum Uncertainty (Example 9.2)
RR
11
R
12
R
21
R
22
x
1
x
2
x
3
x
1
x
2
x
3
x
1
x
2
x
3
x
1
x
2
x
3
x
1
x
2
x
3
001000001000001
002001001001001
010000000010010
011000001010011
020010010010010
021010011010011
100100100100100
110100100110110
111100101110111
112101101111111
(a)
RR
11
R
12
R
21
R
22
H(X
1
¥ X
2
¥ X
3
) log
2
10 = 3.322 log
2
5 = 2.321 log
2
6 = 2.585 log
2
6 = 2.585 log
2
6 = 2.585
H(X
1
¥ X
2
) log
2
5 = 2.321 log
2
3 = 1.585 log
2
3 = 1.585 log
2
4 = 2.000 log
2
4 = 2.000
H(X
1
¥ X
3
) log
2
6 = 2.585 log
2
4 = 2.000 log
2
4 = 2.000 log
2
4 = 2.000 log
2
4 = 2.000
H(X
2
¥ X
3
) log
2
8 = 3.000 log
2
3 = 1.585 log
2
4 = 2.000 log
2
4 = 2.000 log
2
4 = 2.000
H(X
1
|X
2
¥ X
3
) 0.322 0.736 0.585 0.585 0.585
H(X
2
|X
1
¥ X
3
) 0.737 0.321 0.585 0.585 0.585
H(X
3
|X
1
¥ X
2
) 1.000 0.736 1.000 0.585 0.585
I(X
1
|X
2
¥ X
3
) 0.678 0.264 0.415 0.415 0.415
I(X
2
|X
1
¥ X
3
) 0.848 0.679 0.415 0.415 0.415
I(X
3
|X
1
¥ X
2
) 0.585 0.264 0.000 0.415 0.415
(b)
363
When departing from the two classical uncertainty theories, several options
open for applying the principle of minimum uncertainty. Using Figure 6.15 as
a guide, the following options can be identified:
1. To minimize the generalized Hartley functional GH.
2. To minimize the aggregated uncertainty S
¯
.
3. To minimize either of the total uncertainty components in TU or
a
TU.
4. To consider both components in TU or in
a
TU and replace a single uncer-
tainty preference ordering with two preference orderings, one for each
component.
Among these alternatives, the first one seems conceptually the most funda-
mental. This alternative, which may be called a principle of minimum non-
specificity, guarantees that the imprecision in probabilities does not increase
more than necessary when we simplify a system to some given level of com-
plexity. This alternative is also computationally attractive since the functional
to be minimized (the generalized Hartley measure) is a linear functional. The
aim of the following example is to illustrate some of the other alternatives.
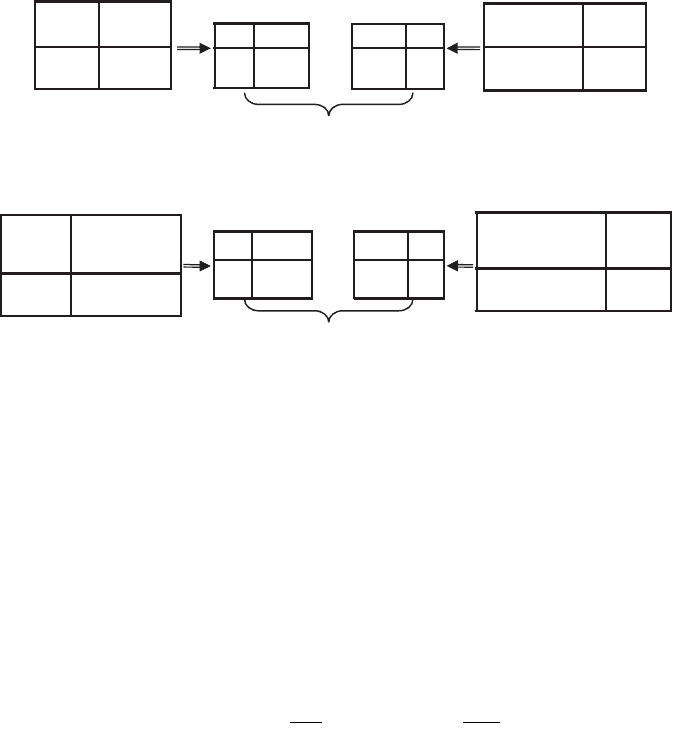
EXAMPLE 9.3. Consider a system Z with one input variable, x
1
, and one
output variable, x
2
, in which the relationship between the variables is expressed
in terms of the joint interval-valued probability distribution given in Table
9.3a. To illustrate the principle of minimum uncertainty, let us consider two
simplifications of the systems by quantizing the input variable via either func-
tion q
1
or function q
2
introduced in Example 9.2. Interval-valued probability
distributions of the two simplifications, Z
1
and Z
2
, are shown in Table 9.3b.They
are also shown with their marginals in Figure 9.2.Their complete formulations,
including the Möbius representations, are in Table 9.4. Subsets A of the Carte-
sian product {0, 1}
2
are defined by their characteristic functions. Relevant con-
ditional uncertainties (since x
1
is an input variable and x
2
is an output variable)
are given in Table 9.3c. They are calculated by the differences between the
uncertainties on X
1
¥ X
2
(shown in Table 9.4) and the uncertainties on X
1
(shown in Figure 9.2). We can conclude that (a) Z
1
is preferred according to S
¯
and generalized Shannon (GS); (b) Z
2
is preferred according to GH; and (c)
both Z
1
and Z
2
are accepted in terms of TU =·GH, GSÒ, since they are not
comparable in terms of the joint preference ordering.
9.2.2. Conflict-Resolution Problems
Another application of the principle of minimum uncertainty is the area of
conflict-resolution problems. For example, when we integrate several overlap-
ping subsystems into one overall system, the subsystems may be locally incon-
sistent in the following sense. An overall system composed of subsystems is
said to be locally inconsistent if it contains at least one pair of subsystems that
share some variables and whose uncertainty functions project to distinct mar-
364 9. METHODOLOGICAL ISSUES
9.2. PRINCIPLE OF MINIMUM UNCERTAINTY 365
ginal uncertainty functions based on the shared variables. An example of
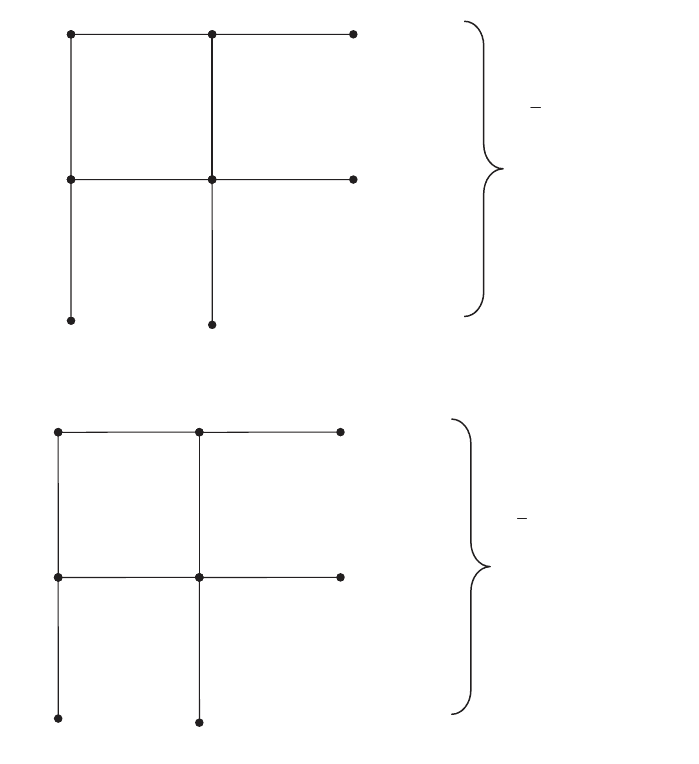
locally inconsistent probabilistic subsystems is shown in Figure 9.3a.
Local inconsistency among subsystems that form an overall system is a kind
of conflict. If it is not resolved, the overall system is not meaningful. For
example, the overall system in Figure 9.3a is not meaningful because no joint
probability distribution function exists on X ¥ Y ¥ Z that is consistent with
both probability distribution functions
1
p,
2
p of the two given subsystems.
Two attitudes toward locally inconsistent collections of subsystems can be
recognized. According to one of them, such collections should be rejected on
the basis of the fact that they do not represent any overall systems. According
to the other attitude, the local inconsistencies should be resolved by modify-
ing the given uncertainty functions of the subsystems to achieve their consis-
tency. However, this can usually be done in numerous ways. The right way to
do that, on epistemological grounds, is to obtain the consistency with the small-
est possible total loss of information contained in the given uncertainty func-
tions. The total loss of information is expressed by the sum of information
losses for the individual subsystems. Thus, resolving local inconsistency can be
formulated, in generic terms, as the following optimization problem, where
Table 9.3. Illustration to Example 9.3
(a) Given System Z
x
1
x
2
m
¯
(x
1
, x
2
) m
¯
(x
1
, x
2
)
0 1 0.1 0.3
0 1 0.3 0.4
1 0 0.0 0.0
1 1 0.2 0.4
2 0 0.0 0.2
2 1 0.2 0.4
(b) Simplifications Z
1
and Z
2
of System Z
Z
1
Z
2
x
1
x
2
m
¯
1
(s) m
¯
1
(s) m
¯
2
(s) m
¯
2
(s)
0 1 0.1 0.3 0.1 0.3
0 1 0.5 0.7 0.3 0.4
1 0 0.0 0.2 0.0 0.2
1 1 0.2 0.4 0.4 0.6
(c) Uncertainties of Simplifications Z
1
and Z
2
Z
1
Z
2
S
¯
(X
2
| X
1
) = 0.814 S
¯
(X
2
| X
1
) = 0.871
GH(X
2
| X
1
) = 0.200 GH(X
2
| X
1
) = 0.158
GS(X
2
| X
1
) = 0.614 GS(X
2
| X
1
) = 0.713
I(
s
u,
s
û) denotes the loss of information when uncertainty function
s
u is
replaced with uncertainty function
s
û.
Given a family of subsystems {
s
Z | s Œ⺞
n
} whose uncertainty functions,
s
u (s
Œ⺞
n
), formalized in uncertainty theory T, are locally inconsistent, determine
locally consistent counterparts of these uncertainty functions,
s
û (s Œ ⺞
n
), for
which the functional
reaches its minimum subject to the following constraints:
(a) Axioms of theory T.
(b) Conditions of local consistency of uncertainty functions
s
û(s Œ ⺞
n
).
When for example, this optimization problem is formulated within proba-
bility theory, then
s
u and
s
û are probability distribution functions: (a) are
axioms of probability theory, (b) are linear algebraic equations, and
Iuu ux
ux
ux
ss s
s
s
xX
s
,
ˆ
log
ˆ
,
()
=
()
()
()
Œ
Â
2
Iuu
ss
s
n
,
ˆ
()
=
Â
1
366 9. METHODOLOGICAL ISSUES
Table 9.4. Complete Formulation of the Two Simplifications Discussed in Example 9.3
x
1
x
2
Z
1
Z
2
00 01 10 11 m
¯
1
(A) m
¯
1
(A) m
1
(A) m
¯
2
(A) m
¯
2
(A) m
2
(A)
A: 0 0 0 0 0.0 0.0 0.0 0.0 0.0 0.0
1 0 0 0 0.1 0.3 0.1 0.1 0.3 0.1
0 1 0 0 0.5 0.7 0.5 0.3 0.4 0.3
0 0 1 0 0.0 0.2 0.0 0.0 0.2 0.0
0 0 0 1 0.2 0.4 0.2 0.4 0.6 0.4
1 1 0 0 0.6 0.8 0.0 0.4 0.6 0.0
1 0 1 0 0.1 0.3 0.0 0.1 0.3 0.0
1 0 0 1 0.3 0.5 0.0 0.5 0.7 0.0
0 1 1 0 0.5 0.7 0.0 0.3 0.5 0.0
0 1 0 1 0.7 0.9 0.0 0.7 0.9 0.0
0 0 1 1 0.2 0.4 0.0 0.4 0.6 0.0
1 1 1 0 0.6 0.8 0.0 0.4 0.6 0.0
1 1 0 1 0.8 1.0 0.0 0.8 1.0 0.0
1 0 1 1 0.3 0.5 0.0 0.6 0.7 0.1
0 1 1 1 0.7 0.9 0.0 0.7 0.9 0.0
1 1 1 1 1.0 1.0 0.2 1.0 1.0 0.1
GH(X
1
¥ X
2
) = 0.400 GH(X
1
¥ X
2
) = 0.358
S
¯
(X
1
¥ X
2
) = 1.785 S
¯
(X
1
¥ X
2
) = 1.871
GS(X
1
¥ X
2
) = 1.385 GS(X
1
¥ X
2
) = 1.513
TU
1
=·0.4, 1.385Ò TU
2
=·0.358, 1.513Ò
where X
s
is the state set of subsystem Z
s
, is the directed divergence introduced
in Section 3.3 (see Eq. (3.56)).
The appearance of local inconsistencies among subsystems of an overall
system is an indicator that the claims expressed by the uncertainty functions
of the subsystems are not fully warranted under the given evidence.Thus, mod-
ifying them in a minimal way (with minimum loss of information) to achieve
their consistency, as facilitated by the described optimization problems, is an
epistemologically sound conflict-resolution strategy.
EXAMPLE 9.4. To illustrate the described optimization problem by a spe-
cific example, let us consider the two locally inconsistent subsystems described
9.2. PRINCIPLE OF MINIMUM UNCERTAINTY 367
[0.0, 0.2]
[0.1, 0.3]
0 1
1
0
1110
0100
[0.7, 0.9]
[0.4, 0.6]
[0.1, 0.3] [0.3, 0.4]
S
(X
1
) = 1
GH(X
1
) = 0.2
GS(X
1
) = 0.8
[0.4, 0.6]
[0.4, 0.6]
[0.1, 0.8]
01
1
0
1110
0100
[0.7, 0.9]
[0.2, 0.4] [0.0, 0.2]
[0.1, 0.3] [0.5, 0.7]
S (X
1
) = S(0.6, 0.4)
= 0.971
GH(X
1
) = 0.2
GS(X
1
) = 0.971 – 0.2
= 0.771
[0.6, 0.8]
[0.2, 0.4]
Z
1
Z
2
Figure 9.2. Two simplifications discussed in Example 9.3.
in Figure 9.3a. Denoting, for convenience,
1
p(x
i
, y
j
) =
1
p
ij
,
2
p(z
k
, y
j
) =
2
p
kj
,
1
pˆ(x
i
,
y
j
) =
1
pˆ
ij
, and
2
pˆ(z
k
, y
j
) =
2
pˆ
kj
for all i, j, k Π{1, 2}, the optimization problem in
this case has the following form.
Given probabilities
1
p
ij
and
2
p
kj
(i, j, k Π{1, 2}), determine the values of
1
pˆ
ij
and
2
pˆ
kj
(i, j, k Π{1, 2}) for which the functional
reaches its minimum under the following constraints:
(c1)
1
pˆ
11
+
1
pˆ
12
+
1
pˆ
21
+
1
pˆ
22
= 1
(c2)
2
pˆ
11
+
2
pˆ
12
+
2
pˆ
21
+
2
pˆ
22
= 1
(c3)
1
pˆ
ij
≥ 0 for all i, j Œ {1, 2}
(c4)
2
pˆ
kj
≥ 0 for all k, j Œ {1, 2}
(c5)
1
pˆ
11
+
1
pˆ
21
=
2
pˆ
11
+
2
pˆ
21
(c6)
1
pˆ
12
+
1
pˆ
22
=
2
pˆ
12
+
2
pˆ
22
Constraints (c1)–(c4) capture axioms of probability theory; constraints (c5)
and (c6) specify conditions for local consistency of the two subsystems.
1
2
1
1
2
2
2
2
1
2
1
2
1
2
1
2
p
p
p
p
p
p
ij
ij
ij
kj
kj
kj
jkji
log
ˆ
log
ˆ
+
====
ÂÂÂÂ
368 9. METHODOLOGICAL ISSUES
1
p(x
i
, y
j
)
=
1
p
ij
x
1
x
2
y
1
0.5 0.1
Y
y
2
0.2 0.2
Y
1
p
Y
(y
j
)
2
p
Y
(y
j
)
Y
y
1
0.6
0.65 y
1
y
2
0.4
π
0.35 y
2
Z
z
1
z
2
2
p(z
k
, y
j
)
=
2
p
kj
0.4 0.25 y
1
0.15 0.2 y
2
Y
Subsystem Z
1
Subsystem Z
2
Inconsistent marginals
Consistent marginals
(a)
Y
Y
p
ˆ
1
Y
p
2
(y
j
)
(y
j
) Y
y
1
0.625
0.625
y
1
y
2
0.375
=
0.375
y
2
Z
z
1
z
2
),(
ˆ
2
jk
yz
p
=
kj
p
ˆ
2
0.3846 0.2404
y
1
y
2
0.1632 0.2118
Y
Subsystem
1
ˆ
Z
Subsystem
2
ˆ
Z
(b)
X
p
ˆ
1
(x
i
, y
j
)
=
ij
p
ˆ
1
x
1
x
2
y
1
0.5208 0.1042
Y
y
2
0.1875 0.1875
X
Figure 9.3. Resolving local inconsistency of subsystems (Example 9.4). (a) Locally inconsis-
tent subsystems Z
1
and Z
2
; (b) consistent subsystem Z
ˆ
1
and Z
ˆ
2
obtained by minimizing the loss
of information in given subsystems Z
1
and Z
2
.
The objective functional in the optimization problem, which measures the total
loss of information for each modification of the probability distribution func-
tions of subsystems Z
1
and Z
2
, is within the given constraints positive (due to
the Gibbs inequality) and convex. Hence, the optimization problem has a
unique solution, which is given in Figure 9.3b.The loss of information in resolv-
ing the local inconsistency in this example is 0.0021.
9.3. PRINCIPLE OF MAXIMUM UNCERTAINTY
The principle of maximum uncertainty allows us to develop epistemologically
sound procedures for dealing with a wide variety of problems that involve
ampliative reasoning—any reasoning in which conclusions are not entailed in
the given premises.
Ampliative reasoning is indispensable to science in a variety of ways.
For example, whenever we utilize a given system for predictions, we employ
ampliative reasoning. Similarly, when we want to estimate microstates from
the knowledge of relevant macrostates and partial information regarding the
microstates (as in image processing and many other problems), we must resort
to ampliative reasoning.The problem of the identification of an overall system
from some of its subsystems is another example that involves ampliative
reasoning.
Ampliative reasoning is also common and important in our daily lives,
where, unfortunately, the principle of maximum uncertainty is not always
adhered to. Its violation leads almost invariably to conflicts in human com-
munication, as was well expressed by Bertrand Russell in his Unpopular
Essays [1950]:
[W]henever you find yourself getting angry about a difference in opinion, be on
your guard; you will probably find, on examination, that your belief is getting
beyond what the evidence warrants.
9.3.1. Principle of Maximum Entropy
The principle of maximum uncertainty is well developed and broadly utilized
within classical information theory, where it is called the principle of maximum
entropy. It is formulated, in generic terms, as the following optimization
problem: determine a probability distribution ·p(x) | x ŒX Ò that maximizes
the Shannon entropy subject to given constraints c
1
, c
2
,...,c
n
, which express
partial information about the unknown probability distribution, as well as the
general constraints (axioms) of probability theory.The most typical constraints
employed in practical applications of the maximum entropy principle are
mean (expected) values of one or more random variables or various marginal
probability distributions of an unknown joint distribution.
9.3. PRINCIPLE OF MAXIMUM UNCERTAINTY 369

As an example, consider a random variable x with possible (given) non-
negative real values x
1
, x
2
,..., x
n
. Assume that probabilities p
i
of values
x
i
(i Œ ⺞
n
) are not known, although we do know the mean (expected) value
E(x) of the variable. Employing the maximum entropy principle, we estimate
the unknown probabilities p
i
, i Œ ⺞
n
, by solving the following optimization
problem, in which values x
i
(i Œ ⺞
n
) and their expected value are given and
probabilities p
i
(i Œ ⺞
n
) are to be determined.
Maximize the functional
subject to the constraints
(9.1)
and
(9.2)
For the sake of simplicity, in this formulation we use the natural logarithm
in the definition of Shannon entropy. Clearly, the solution to this problem is
not affected by changing the base of the logarithm in the objective functional.
Equation (9.1) represents the available information; Eq. (9.2) represents the
standard constraints imposed on p by probability theory.
First, we form the Lagrange function
where a and b are the Lagrange multipliers that correspond to the two con-
straints. Second, we form the partial derivatives of L with respect to p
i
(i Œ
⺞
n
), a, and b, and set them equal to zero; this results in the equations
∂
∂
∂
∂
∂
∂
L
p
px i
L
p
L
Ex px
i
ii n
i
i
n
ii
i
n
=- - - - = Œ
=- =
=
()
-=
=
=
Â
Â
ln
.
10
10
0
1
1
ab
a
b
for each ⺞
Lpp p pxEx
ii
i
n
i
i
n
ii
i
n
=- - -
Ê
Ë
Á
ˆ
¯
˜
--
()
Ê
Ë
Á
ˆ
¯
˜
===
ÂÂÂ
ln ,ab
111
1
pi p
in i
i
n
≥Œ
()
=
=
Â
01
1
⺞ ,.
Ex px
ii
i
n
()
=
=
Â
1
Sp p p p p
nii
i
n
12
1
, ,..., ln
()
=-
=
Â
370 9. METHODOLOGICAL ISSUES

The last two equations are exactly the same as the constraints of the opti-
mization problem. The first n equations can be written as
When we divide each of these equations by the sum of all of them (which must
be one), we obtain
(9.3)
for each i Œ ⺞
n
. In order to determine the value of b, we multiply the ith
equation in Eq. (9.3) by x
i
and add all of the resulting equations, thus
obtaining
and
Multiplying this equation by e
bE(x)
results in
(9.4)
This equation must now be solved (numerically) for b and the solution
substituted for b in Eq. (9.3), which results in the estimated probabilities
p
i
(i Œ ⺞
n
).
EXAMPLE 9.5. To illustrate this application of the maximum entropy prin-
ciple, first consider an “honest” (unbiased) die. Here x
i
= i for i Œ ⺞
6
and
E(x) = 3.5. Equation (9.4) has the form
--- + + + =
---
25 15 05 05 15 25 0
25 15 05 05 15 25
.... . . .
......
eeee e e
bbbbbb
xExe
i
xEx
i
n
i
-
()
[]
=
--
()
[]
=
Â
b
0
1
.
xe E x e
i
xx
i
n
i
n
ii
--
==
-
()
=
ÂÂ
bb
11
0.
Ex
xe
e
i
x
i
n
x
i
n
i
i
()=
-
=
-
=
Â
Â
b
b
1
1
p
e
e
i
x
x
k
n
i
k
=
-
-
=
Â
b
b
1
pe e e
pe e e
pe e e
xx
xx
n
xx
nn
1
1
1
2
1
1
1
1
11
22
==
==
==
-- -
-+
()
-
-- -
-+
()
-
-- -
-+
()
-
ab
a
b
ab
a
b
ab
a
b
MM
.
9.3. PRINCIPLE OF MAXIMUM UNCERTAINTY 371