Fishwick P.A. (editor) Handbook of Dynamic System Modeling
Подождите немного. Документ загружается.


34-16 Handbook of Dynamic System Modeling
012345678
0
2
4
6
8
System response
Time
y
3
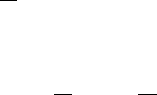
FIGURE 34.17 Output of the manufacturing system.
In words, machine M
2
should only start producing as soon as the buffer contents of the buffer in front of
it becomes 1. Therefore, we should not allow for a positive u
2
as soon as y
2
> 0, but only in case y
2
≥1.
When we consider the initially empty system Eq. (34.7), i.e., x(0) =0, and assume
u
i
(t) =
⎧
⎨
⎩
µ
i
if y
i
(t) ≥ 1
i ∈{1, 2}
0 otherwise
(34.15)
the resulting system response to an input of u
0
=1 is shown in Figure 34.17. Note that we obtain exactly
the same response as in Figure 34.15.
While this hybrid model has an acceptable behavior when we ramp up our manufacturing system,
it stops producing at buffer level y
i
=1 when we ramp down. This is not what we would like to have.
Therefore, in case u
1
=0, machine M
1
should be allowed to produce until y
1
=0.
Under these conditions, we could also think of our model operating in different modes. For the
manufacturing system under consideration, we can distinguish the following modes:
mode 1: 0 ≤y
1
≤1, 0 ≤y
2
≤1, u
0
= 0, u
1
≥0, u
2
=0.
mode 2: 0 ≤y
1
≤1, 0 ≤y
2
≤1, u
0
≥0, u
1
=0, u
2
≥0.
mode 3: 1 ≤y
1
,0≤y
2
≤1, u
1
=0, u
2
≥0.
mode 4: 1 ≤y
1
,0≤y
2
≤1, u
1
≥0, u
2
=0.
mode 5: 0 ≤y
1
≤1, 1 ≤y
2
, u
0
=0, u
1
≥0.
mode 6: 0 ≤y
1
≤1, 1 ≤y
2
, u
0
≥0, u
1
=0.
mode 7: 1 ≤y
1
,1≤y
2
.
In all of these modes, the system dynamics is described by Eq. (34.7).
The hybrid model just presented is also known as a piecewise affine (PWA) system (Sontag, 1981).
Other well-known descriptions are linear complementarity (LC) systems (Heemels et al., 2000; Schaft
and Schumacher, 1998) and mixed logical dynamical (MLD) systems (Bemporad and Morari, 1999). In
Bemporad et al. (2000b) and Heemels et al. (2001) it was shown that (under certain assumptions like
well-posedness) these three descriptions are equivalent. This knowledge is useful, as each modeling class
has its own advantages. Stability criteria for PWA systems were proposed in DeCarlo et al. (2000) and
Johansson and Rantzer (1998), and control and state-estimation techniques for MLD hybrid models have
been presented in Bemporad et al. (2000a, 1999) and Bemporad and Morari (1999). These results can now
be applied for controlling the hybrid systems model of our manufacturing system.
34.8 Flow Models
The fluid models presented in the previous section are (still) not satisfactory. While they do not suffer
from the problem that lots come out of the system as soon as we start producing, flow times are not truly
present in these models. It is not possible to determine the time it takes lots to leave once they have entered
Modeling and Analysis of Manufacturing Systems 34-17
the system. Furthermore, according to these models any throughput can be achieved by means of zero
inventory, whereas in Section 34.2 we already noticed that the nonlinear (steady-state) relations depicted
in Figure 34.2 should be incorporated in any reasonable model of manufacturing systems.
In this section, we present approximation models that do incorporate both throughput and flow
time. These dynamic models are inspired by the continuum theory of highway traffic. Therefore, before
presenting this dynamic model we first present some results from traffic theory.
34.8.1 Introduction to Traffic Flow Theory: The LWR Model
In the mid-1950s Lighthill and Whitham (1955) and Richards (1956) proposed a first-order fluid approx-
imation of traffic flow dynamics. This model nowadays is known in traffic flow theory as the LWR
model.
Traffic behavior for a single one-way road can be described using three variables that vary in time t and
space x:flowu(x, t), density ρ(x, t), and speed v(x, t). Flow is the product of speed and density:
u(x, t) = ρ(x, t)v(x, t) ∀x, t (34.16)
For a highway without entrances or exits, the number of cars between any two locations x
1
and x
2
(x
1
< x
2
)
needs to be conserved at any time t, i.e., the change in the number of cars between x
1
and x
2
is equal to
the flow entering via x
1
minus the flow leaving via x
2
:
∂
∂t
x
2
x
1
ρ(x, t)dx = u(x
1
, t) −u(x
2
, t) (34.17a)
or in differential form:
∂ρ
∂t
(x, t) +
∂u
∂x
(x, t) = 0 (34.17b)
The two relations Eq. (34.16) and Eq. (34.17) are basic relations that any model must satisfy. As we have
three variables of interest, a third relation is needed. For this third relation, several choices can be made.
The LWR model assumes in addition to the relations Eq. (34.16) and Eq. (34.17) that the relation between
flow and density observed under steady-state conditions also holds when flow and density vary with x
and/or t; i.e., for a homogeneous highway:
u(x, t) = S(ρ(x, t)) (34.18)
The model given by Eqs. (34.16)–(34.18) can predict some traffic phenomena rather well. To overcome
some of the deficiencies of the LWR model, in the early 1970s higher order theories have been proposed
where Eq. (34.18) has been replaced by another partial differential equation, containing diffusion or
viscosity terms. Unfortunately, these extended models experience some undesirable properties, as made
clear in (Daganzo, 1995). The most annoying of these properties is the fact that in these second-order
models cars can travel backward. Second-order models that do not suffer from this deficiency have been
presented in Jiang et al. (2002) and Zhang (2002).
34.8.2 A Traffic Flow Model for Manufacturing Flow
In the previous subsection, we introduced the LWR model from traffic flow theory. This model describes
the dynamic behavior of cars along the highway at a macroscopic level and contains information both
about the number of cars passing a certain point and about the time it takes cars to go from one point to
the other. The LWR model can not only be used for describing the flow of cars along the highway, but also
for describing the flow of products through a manufacturing line.
Consider, instead of a homogeneous highway, a homogeneous manufacturing line, i.e., a manufacturing
line that consistsof a lot of identical machines. Let t denote the time and x the position in the manufacturing
line. The behavior of lots flowing through the manufacturing line can also be described by three variables
34-18 Handbook of Dynamic System Modeling
that vary with time and position: flow u(x, t) measured in unit lots per unit time, density ρ(x, t) measured
in unit lots per unit machine, and speed v(x, t) measured in unit machines per unit time. Now we can
relate these three variables by means of Eqs. (34.16)–(34.18), where in Eq. (34.18) the function S describes
the relation between flow and density observed under steady-state conditions.
To make this last statement more explicit, consider a manufacturing line consisting of m machines with
exponentially distributed process times and an average capacity of µ lots per unit time. Furthermore,
consider a Poisson arrival process where lots arrive at the first machine with a rate of λ lots per unit time
(λ<µ), and assume that buffers have infinite capacity. Then we know from queueing theory (Kleinrock,
1975) that the average number of lots N in each workstation (consisting of a buffer and a machine) in
steady-state is given by
N =
λ
µ
1 −
λ
µ
=
λ
µ −λ
(34.19)
In words, in steady-state we have ρ(x, t) is constant and
1
m
ρ(x, t) =
u(x, t)
µ −u(x, t)
(34.20)
from which we can conclude that in steady-state
u(x, t) =
µρ(x, t)
m +ρ(x, t)
(34.21)
For this example, this is the mentioned function S(ρ).
With this information, we can conclude that the dynamics of this manufacturing line might be described
by means of the partial differential equation
∂ρ
∂t
+µ
∂
∂x
ρ
m +ρ
= 0 (34.22a)
Together with the relations
u =
µρ
m +ρ
and v =
u
ρ
or v =
µ
m +ρ
(34.22b)
this completes our model.
Note that contrary to the fluid models presented in the previous section, the dynamic model of
Eq. (34.22) is able to incorporate the stochasticity as experienced in manufacturing lines. If the man-
ufacturing line would be in steady-state, the throughput and flow time as predicted by the model of
Eq. (34.22) is exactly the same as those predicted by queueing theory. However, contrary to queueing
theory, the model of Eq. (34.22) is not a steady-state model, but also incorporates dynamics. Therefore,
the model Eq. (34.22) is a dynamic model that incorporates both throughput and flow time. Furthermore,
given the experience in the field of fluid dynamics, the model is computationally feasible as well. For more
on these flow models, the interested reader is referred to Armbruster et al. (2004, 2005) and Armbruster
and Ringhofer (2005).
34.9 Conclusions
In this chapter, we presented some of the models used in the modeling, analysis, and control of manufactur-
ing systems. In Section 34.3 some analytical modeling techniques and methods for analyzing steady-state
behavior of manufacturing systems have been introduced. To get a more detailed insight in the dynamics of
a manufacturing system discrete-event models, as introduced in Section 34.4 can be used. A disadvantage
Modeling and Analysis of Manufacturing Systems 34-19
of discrete-event models is their complexity. To reduce the complexity of discrete-event models, EPTs have
been introduced in Section 34.5. This enables the modeling of a manufacturing system as a large queueing
network.
Once the dynamics of manufacturing systems can be well described by a relatively simple discrete-
event model, the problem of controlling the dynamics of manufacturing systems becomes of interest.
In Section 34.6 a control framework has been presented. A crucial role in this framework is played
by approximation models of manufacturing systems. In Section 34.7 the most common approximation
models, fluid models, have been introduced, together with some extensions of these models. These fluid
models mainly focus on throughput and do not contain information on flow times. Finally, in Section 34.8,
flow models have been presented that do incorporate both throughput and flow time information.
References
Armbruster, D., P. Degond, and C. Ringhofer (2005). Continuum models for interacting machines. In
D. Armbruster, K. Kaneko, and A. Mikhailov (Eds.), Networks of Interacting Machines: Produc-
tion Organization in Complex Industrial Systems and Biological Cells. Singapore: World Scientific
Publishing.
Armbruster, D., D. Marthaler, and C. Ringhofer (2004). Kinetic and fluid model hierarchies for supply
chains. SIAM Journal on Multiscale Modeling and Simulation 2(1), 43–61.
Armbruster, D. and C. Ringhofer (2005). Thermalized kinetic and fluid models for re-entrant supply
chains. SIAM Journal on Multiscale Modeling and Simulation 3(4), 782–800.
Baker Jr., G. A. (1965).The theory and application of the Pade approximant method. In K. A. Brueckner
(Ed.), Advances in Theoretical Physics, Volume 1, pp. 1–58. New York: Academic Press.
Bemporad, A., F. Borrelli, and M. Morari (2000a, June). Piecewise linear optimal controllers for hybrid
systems. In Proceedings of the 2000 American Control Conference, Chicago, IL, pp. 1190–1194.
Bemporad, A., G. Ferrari-Trecate, and M. Morari (2000b, October). Observability and controllability of
piecewise affine and hybrid systems. IEEE Transactions on Automatic Control 45(10), 1864–1876.
Bemporad, A., D. Mignone, and M. Morari (1999, June). Moving horizon estimation for hybrid sys-
tems and fault detection. In Proceedings of the 1999 American Control Conference, San Diego, CA,
pp. 2471–2475.
Bemporad, A. and M. Morari (1999). Control of systems integrating logic, dynamics, and constraints.
Automatica 35, 407–427.
Curtain, R. F. and H. Zwart (1995). An Introduction to Infinite-Dimensional Linear Systems Theory. Berlin,
Germany: Springer.
Daganzo, C. F. (1995). Requiem for second-order fluid approximations of traffic flow. Transportation
Research Part B 29(4), 277–286.
DeCarlo, R. A., M. Branicky, S. Petterson, and B. Lennartson (2000). Perspectives and results on the
stability and stabilizability of hybrid systems. Proceedings of the IEEE 88(7), 1069–1082.
Forrester, J. W. (1961). Industrial Dynamics. Cambridge, MA: MIT Press.
Heemels, W. P. M. H., J. M. Schumacher, and S. Weiland (2000). Linear complementarity systems. SIAM
Journal on Applied Mathematics 60(4), 1234–1269.
Heemels, W. P. M. H., B. d. Schutter, and A. Bemporad (2001). Equivalence of hybrid dynamical models.
Automatica 37(7), 1085–1091.
Hopp, W. J. and M. L. Spearman (2000). Factory Physics, second ed. New York: Irwin/McGraw-Hill.
Jacobs, J. H., P. P. v. Bakel, L. F. P. Etman, and J. E. Rooda (2006). Quantifying variability of batching
equipment using effective process times. IEEE Transactions on Semiconductor Manufacturing 19(2),
269–275.
Jacobs, J. H., L. F. P. Etman, E. J. J. v. Campen, and J. E. Rooda (2003). Characterization of the operational
time variability using effective processing times. IEEE Transactions on Semiconductor Manufacturing
16(3), 511–520.
34-20 Handbook of Dynamic System Modeling
Jiang, R., Q. S. Wu, and Z. J. Zhu (2002). A new continuum model for traffic flow and numerical tests.
Transportation Research. Part B, Methodological 36, 405–419.
Johansson, M. and A. Rantzer (1998). Computation of piece-wise quadratic Lyapunov functions for hybrid
systems. IEEE Transactions on Automatic Control 43(4), 555–559.
Kingman, J. F. C. (1961). The single server queue in heavy traffic. Proceedings of the Cambridge Philosophical
Society 57, 902–904.
Kleinrock, L. (1975). Queueing Systems, Volume I: Theory. New York: Wiley.
Kuehn, P. J. (1979). Approximate analysis of general queueing networks by decomposition. IEEE
Transactions on Communication 27, 113–126.
Lighthill, M. J. and J. B. Whitham (1955). On kinematic waves. I: Flow movement in long rivers. II:
A theory of traffic flow on long crowded roads. Proceedings of the Royal Society A 229, 281–345.
Little, J. D. C. (1961). A proof of the queueing formula l =λw. Operations Research 9, 383–387.
Richards, P. I. (1956). Shockwaves on the highway. Operations Research 4, 42–51.
Sattler, L. (1996, November). Using queueing curve approximations in a fab to determine productivity
improvements. In Proceedings of the 1996 IEEE/SEMI Advanced Semiconductor Manufacturing
Conference and Workshop. Cambridge, MA, pp. 140–145.
Schaft, A. J. v. d. and J. M. Schumacher (1998). Complementarity modelling of hybrid systems. IEEE
Transactions on Automatic Control 43, 483–490.
Sontag, E. D. (1981). Nonlinear regulation: the piecewise linear approach. IEEE Transactions on Automatic
Control 26(2), 346–358.
Zhang, H. M. (2002). A non-equilibrium traffic model devoidof gas-like behavior. Transportation Research.
Part B, Methodological 36, 275–290.
35
Sensor Network
Component-Based
Simulator
Boleslaw K. Szymanski
Rensselaer Polytechnic Institute
Gilbert Gang Chen
Rensselaer Polytechnic Institute
35.1 The Need for a New Sensor Network Simulator ........35-1
Why a New Simulator
•
Features of SENSE
•
Currently
Available Components and Simulation Engines
35.2 Component Simulation Toolkit ..................................35-3
Motivation:FromObjecttoComponent
•
Functor
•
Inport and Outport Class
•
Simulation Time and
Port Index
•
Timer
35.3 Wireless Sensor Network Simulation ..........................35-7
Running the Simulation
35.4 Conclusions ..................................................................35-15
35.1 The Need for a New Sensor Network Simulator
The emergence of wireless sensor networks brought many open issues to network designers. Traditionally,
the three main techniques for analyzing the performance of wired and wireless networks are analytical
methods, computer simulation, and physical measurement. However, because of many constraints imposed
on sensor networks, such as energy limitation, decentralized collaboration, and fault tolerance, algorithms
for sensor networks tend to be quite complex and usually defy analytical methods that have been proved
to be fairly effective for traditional networks. Furthermore, few sensor networks have come into existence,
for there are still many unsolved research problems, so measurement is virtually impossible. It appears
that simulation is the only feasible approach to the quantitative analysis of sensor networks.
35.1.1 Why a New Simulator
A good simulator possesses two essential features. First, it must support reusable models. A model written
for one simulation should be amenable to effortless embedding into other simulations that require the same
kind of a model. Second, the model should be easy to be built from scratch. Interestingly, we observe that
most existing simulators do not possess these two features simultaneously. Most commercial simulators
provide a reusable model library, often coming with a friendly graphical user interface, but adding new
models to the library is always a painful task. However, most freely available simulators follow a bottom-up
approach; writing models from scratch is straightforward, but the reusability is severely limited.
ns2 (ns2, 1990), perhaps the most widely used network simulator, has been extended to include some
basic facilities to simulate sensor networks. However, one of the problemsof ns2 is its object-oriented design
that introduces much unnecessary interdependency between modules. Such interdependency sometimes
makes the addition of new protocol models extremely difficult, only mastered by those who have intimate
35-1
35-2 Handbook of Dynamic System Modeling
familiarity with the simulator. Being difficult to extend is not a major problem for simulators targeted at
traditional networks, for there, the set of popular protocols is relatively small. For example, Ethernet is
widely used for wired LAN, IEEE 802.11 for wireless LAN, and TCP for reliable transmission over unreliable
media. For sensor networks, however, the situation is quite different. There are no such dominant protocols
or algorithms and there will unlikely be any, because a sensor network is often tailored for a particular
application with specific features, and it is unlikely that a single algorithm can always be the optimal one
under various circumstances.
Many other publicly available network simulators, such as JavaSim (Javasim, 2004), SSFNet (ssfnet,
2000), Glomosim (GloMoSim, 2004), and its descendant Qualnet (Qualnet, 2004), attempted to address
problems that were left unsolved by ns2. Among them, JavaSim developers realized the drawback of object-
oriented design and tried to attack this problem by building a component-oriented architecture. However,
they chose Java as the simulation language, inevitably sacrificing the efficiency of the simulation. Moreover,
C++ with Standard Template Library (Musser and Saini, 1996) can easily achieve high efficiency while
maintaining a high level of code reuse, which matched our design goal better than Java. SSFNet and
Glomosim designers were more concerned about parallel simulation, with the latter more focused on
wireless networks. They are not superior to ns2 in terms of design and extensibility.
35.1.2 Features of SENSE
SENSE is designed to be an efficient and powerful sensor network simulator that is also easy to use. We
identify three most critical factors as
•
Extensibility: The enabling force behind the fully extensibility network simulation architecture is
our progress on component-based simulation. We introduced a component-port model that frees
simulation models from interdependency usually found in an object-oriented architecture, and
then proposed a simulation component classification that naturally solves the problem of handling
simulated time. The component-port model makes simulation models extensible: a new component
can replace an old one if they have compatible interfaces, and inheritance is not required. The
simulation component classification makes simulation engines extensible: advanced users have the
freedom to develop new simulation engines that meet their needs.
•
Reusability: The removal of interdependency between models also promotes reusability. A compo-
nent developed for one simulation can be used in another if it satisfies the latter’s requirements on
the interface and semantics. There is another level of reusability made possible by the extensive use
of C++template: a component is usually declared as a template class so that it can handle different
types of data.
•
Scalability: Unlike many parallel network simulators, especially SSFNet and Glomosim, paralleliza-
tion is providedas an option to the users of SENSE. This reflects our belief that completely automated
parallelization of sequential discrete-event models, however tempting it may seem, is impossible,
just as automated parallelization of sequential programs. Even if it is possible, it is doomed to be
inefficient. Therefore, parallelizable models require larger effort than sequential models do, but a
good portion of users are not interested in parallel simulation at all. In SENSE, a parallel simulation
engine can only execute components of compatible components. If a user is content with the default
sequential simulation engine, then every component in the model repository can be reused.
35.1.3 Currently Available Components and Simulation Engines
•
Battery Model: Linear Battery, Discharge Rate Dependent and Relaxation Battery
•
Application Layer : Random Neighbor; Constant Bit Rate
•
Network Layer: Simple Flooding; a simplified version of ADOV without route repairing, a simplified
version of DSR without route repairing
•
MAC Layer: NullMAC; IEEE 802.11 with DCF
Sensor Network Component-Based Simulator 35-3
•
Physical Layer: Duplex Transceiver; Wireless Channel
•
Simulation Engine: CostSimEng (sequential)
35.2 Component Simulation Toolkit
Component-oriented simulation toolkit (COST) is a general-purpose discrete-event simulator (Chen and
Szymanski, 2001). The main design purpose of COST is to maximize the reusability of simulation models
without losing efficiency. To achieve this goal, COST adopts a component-based simulation worldview
based on a component-port model. A simulation is built by configuring and connecting a number of
components, either off the shelf or fully customized. Components interact with each other only via input
and output ports, thus the development of a component becomes completely independent of others.
The component-port model of COST makes it easy to construct simulation components from scratch.
Implemented in C++, COST also features a wide use of templates to facilitate language-level reuse.
COST is a library of several classes that facilitates the development of discrete-event simulation using
CompC++, a component-oriented extension to C++. It differs from many other tools in the simulation
worldview it adopts. There are primarily two worldviews that are widely used in the discrete-event simula-
tion community: event scheduling and process interaction. Both have their strengths and weaknesses. The
event scheduling is much more efficient, but it is hard to program. Process interaction technique requires
less programming effort. However, it is difficult to implement using imperative programming languages
and many implementations based on special simulation languages are not efficient.
COST adopts a component-oriented worldview, which is a variation of the event scheduling worldview.
Using this technique, a discrete-event simulation is viewed as a collection of components that interact with
each other by exchanging messages through communication ports. Besides components, the simulation
contains a simulation engine that is responsible for synchronizing components. An event-oriented view
is adopted to model individual components, i.e., the component has one or more event handlers each of
which performs corresponding actions upon the arrival of a certain type event. Events are divided into
two categories. Synchronous events are the messages arriving at the input ports, which are sent by its
neighboring components. Asynchronous events are associated with timers, a special kind of ports lying
between the components and the simulation engine. Components receive and schedule asynchronous events
through timers.
COST takes advantage of component-oriented features that are only available in CompC++.
35.2.1 Motivation: From Object to Component
Convenient and powerful as object-oriented programming is, it has its limits. One of these is that it often
imposes unnecessary interobject dependence on the deployment of objects that prevents objects from
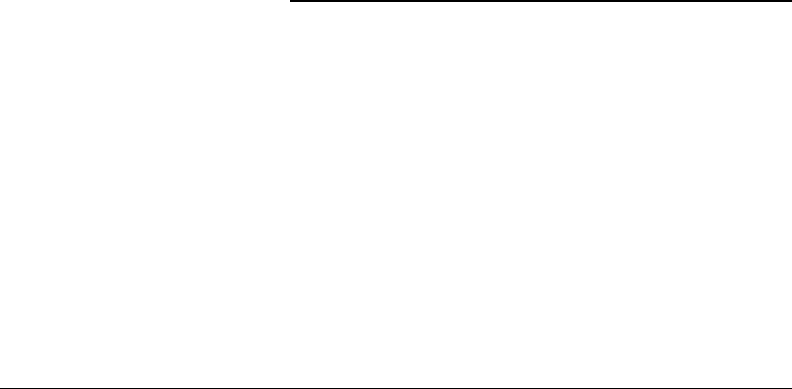
being reusable. As a small example, in Figure 35.1, an object A calls a method g() of another object B.
Object A must keep a pointer (or a reference) to object B to make such a method call. Let us assume that
these two objects have been set up correctly in one program. The difficulty arises when A is to be reused
B*pb;
Object A
void f()
{
...
pb⫺⬎g();
...
}
Object B
void q()
{
...
}
FIGURE 35.1 Object dependencies in object-oriented languages.
35-4 Handbook of Dynamic System Modeling
Component A
Outport void h();---
void f()
{
...
h();
...
}
Component B
–––Inport void g()
{
...
}
FIGURE 35.2 Component dependencies in component-oriented simulation.
in another program. Obviously, in such a case, either B must also be moved over to the new program, or
there is another object that is derived from B available for A to access. If it is the former, things will become
worse if some of B’s methods are dependent on another object C. As a result, any object that A depends
upon, either directly or indirectly, must be available in the new program.
Yet we only need, in the above example, a method that provides the same functionality as B.g() does. We
should not be concerned with which object can provide such a functionality, whether it be B or a different,
completely unrelated object D. In object-oriented programming, once you make an interobject method
call, you not only introduce explicit interobject dependence manifested by the method call (represented
by the solid arrow in the Figure 35.1), but also implicit dependence that is hard to trace and maintain
(represented by the dashed arrow).
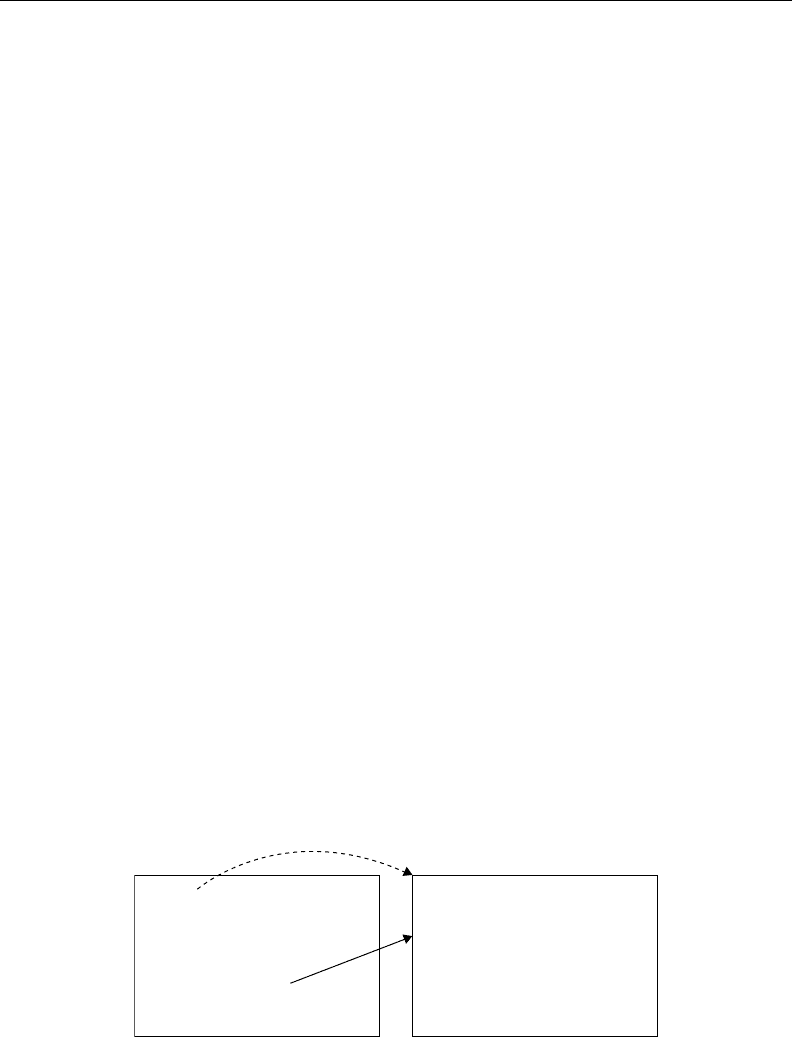
The solution is to introduce inports and outports. The use of inports and outports has been introduced
in DEVS formalism (Zeigler et al., 1997; DEVS, 2004); however, in our approach their role have expanded
to become, next to component themselves, an integral part of composing simulations. An inport defines
what functionality an object (now it is becoming a component) provides, and an outport defines what
functionality it needs. In Figure 35.2, it is apparent that the implicit dependence has been removed.
Another benefit of having inports and outports is that any interaction a component may have with other
components can be deduced only from its interface (which is composed of declarations of inports and
outports). In contrast, for an object, the same information is clear only after scanning through the entire
source code.
The central idea of CompC++is to add inports and outports to objects to make them look and function
like components. The extension to the standard C++ language is minimal: only four new keywords
(component, inport, outport, and connect) and four new syntactic rules are needed. The addition of these,
nevertheless, opens up a whole new programming paradigm, which is referred to as component-oriented
programming.
35.2.1.1 Implementation of COST
The first issue of implementing the aforementioned simulation component model is the choice of the
implementing language. Discrete-event simulators can be roughly divided into two groups: those based
on a special simulation language, such as GPSS and SIMSCRIPT (Law and Kelton, 1982), and those based
on a general programming language, such as SIMPACK (Fishwick, 1992) and SIMKIT (Gomes et al.,
1995) Simulation languages contain abundant semantics designed for simulation, but requires a steep
learning curve. General programming languages are more familiar to programmers, but lack the essential
simulation constructs.
We chose C++as the implementation language for two reasons. First, general programming languages
always have good compiler support, and thus their execution speed is generally faster after optimization.
Second, language-level reusability is a factor as important as component-level reusability, and C++is one
of the few languages that support code reuse well. With STL (Austern, 1999; Musser and Saini, 1996), C++
programs can easily achieve high efficiency while maintaining a high level of code reuse, which matches
our design goal.
Sensor Network Component-Based Simulator 35-5
However, with C++we ran into a problem. As mentioned in the last section, input ports are equivalent to
functions, so it is natural to define them as member functions of the component. But how can we represent
output ports? C++ language standard requires that the address of an object must be provided when
the member function is being called. This conflicts with the requirement that component development
should be completely independent. The classical solution for such a problem is a functor, which is the
generalization of the function pointer.
35.2.2 Functor
A functor, or a function object, is an object“that can be called in the same way that a function is” (Austern,
1999; Musser and Saini, 1996). A functor class overloads the operator () so that it appears as a function
pointer. For instance, the following is declaration of a functor class that takes one function argument.
template <class T> class functor {
public:
typedef funct_t bool (*f)(T );
functor (funct_t _f): f(_f) {}
virtual bool operator (T t) { return f(t); }
private:
funct_t f;
};
The class functor is a helper class that wraps a function pointer of type funct_t. Upon invocation, it calls
the actual function pointer and returns the result. The syntax of using the functor is exactly the same as
that of a function pointer.
The same idea can be applied to member functions as well. In C++, a member function of a class always
takes an implicit parameter this, which is a pointer to the object upon which the member function will
be invoked. As a result, two member functions that belong to different classes but take the same explicit
parameters are treated as functions of different types. In the component level, however, they should be
viewed as interchangeable. A mem_functor declared below can hide the class type as well as the implicit
parameter this.
template <class C, class T>
class mem_functor : public functor {
public:
typedef funct_t
bool (C::*f)(T);
mem_functor (C* _c, funct_t _f)
: c(_c), f(_f) {}
virtual bool operator(T t){return c->f(t);}
private:
C* c;
funct_t f;
};
With these two classes, functor and mem_functor, it is now straightforward to implement input and
output ports. An input port could be simply an instantiation of the mem_functor class. Since an output
port does not know the component(s) to which it will be connected, it could be represented as a pointer
to a functor. When connecting an input port to an output port implemented in this way, the address of the
mem_functor object corresponding to the input port is assigned to the functor pointer corresponding to
the output port, because the class mem_functor is derived from the functor class. When the output port is
invoked, the operator () of the mem_functor class is called, because it is declared as virtual.