Fishwick P.A. (editor) Handbook of Dynamic System Modeling
Подождите немного. Документ загружается.

15-14 Handbook of Dynamic System Modeling
TABLE 15.1 Event Calendar
Time (ms) Event
20 open_tonneau
2020 move_top_up_cmd
2150 move_down_window
2250 stop_moving_window
For aperiodic events, this approach may not be applicable, as the accuracy with which the time at which
events can be effected degenerates to the period of the base rate, which is typically too coarse.
In case state events are present, a numerical solver with zero-crossing detection built-in is desirable. Such
a numerical solver returns before the final time is reached and reports the time at which a zero crossing
was found.
15.4.4 Event-Driven Execution
Another approach to generating behavior takes an event-driven perspective. This is particularly efficient
for time events that are aperiodic and often have a stochastic component to their time of occurrence.
Rather than having a numerical solver move time forward until each of the events occurs, time imme-
diately jumps from one event time to another. To efficiently implement this, typically an event calendar is
used to keep track of all events that are scheduled to occur. An example of an event calendar is presented in
Table 15.1. It shows how the first upcoming event to occur is at 20 (ms), followed by another at 2020 (ms).
An event-driven approach is much more efficient in handling aperiodic time events as it does not
require a time-driven solver to move time forward by means of integration over time. Typically, hundreds
of thousands of events can be conveniently simulated in a matter of seconds.
To achieve such efficiency, it is critical that the event calendar be implemented in an efficient manner. In
particular, efficient search of the event calendar needs to be facilitated, because new events must be inserted
in the correct place, and events that were scheduled at one time may have to be located and retracted at a
later time.
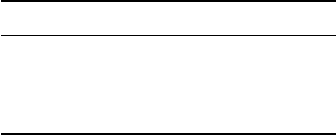
One implementation, called calendar queue, mimics a traditional calendar [3], which uses an array to
index into a number of bins while the content of each bin is implemented as a doubly linked list. In this
list, each item has a link to the next item as well as the previous item, which allows each item in the list
to be accessed in a forward as well as backward manner. Deleting any item can then be done in constant
time. The array that implements the number of bins has constant access time to each of the bins.
This is illustrated in Figure 15.11 where four bins are represented by the array at the top. The bin with
index 0 contains all elements with a time stamp in the range from 0 to 1, with 1 not included; the bin with
index 1 contains all elements with a time stamp in the range from 1 to 2, with 2 not included, etc. Events
with a time stamp of 4 or more are distributed based on the result of the time stamp modulo 4.
The calendar queue combines the benefit of quick insertion of events in the doubly linked list where the
array is more efficient for indexing a large event calendar. Further permutations of different data structures
such as arrays, lists, and heaps can be devised depending on the characteristics of the event distributions
particular to a problem under study. For example, if the number of scheduled events varies greatly during
simulation, dynamically reconfiguring the data structure may become important.
Note that an event-driven implementation can be exploited to generate behaviors for continuous-time
models as well. In this approach, the numerical solver is modeled as a discrete-event component and the
computations at each time step are aperiodic events to be handled (e.g., D’Abren and Wainer, 2003).
15.4.5 Combining the Execution Types
In many applications of modeling and simulation, in particular for hybrid dynamic systems, it is common
to have an extensive model component that is of an aperiodic discrete-event nature as well as a component
that is of a continuous-time nature. For example, the power window system in Figure 15.3 may contain
Hybrid Dynamic Systems: Modeling and Execution 15-15
Lead Lead Lead LeadTail Tail Tail Tail
0.1
ne
xt
data
prev
1.5
next
data
prev
0.4 1.6
next next
data data
prev prev
0.5 5.1
next next
data data
prev prev
4.2 5.8
Next
next
Data
data
Prev
3.3
ne
xt
data
prev
3.4
next
data
prev
19.5
Next
Data
Prev
prev
9.3
Next
Data
Prev
0123
FIGURE 15.11 Calendar queue event list.
a detailed continuous-time model of the door with window, dc motor actuator, signal conditioning
hardware, and the like, all of which may contain some discontinuitiesmodeledby local finite state machines.
Similarly, the controller may operate in a discrete-time manner because it executes with a given sample
rate. The controller may implement an extensive signal processing component, data analysis computations,
supervisory control, and further elements. The CAN behavior may be modeled in detail by a discrete-
event model that performs behaviors such as capturing the generation of packets, routing them through
the network, and possibly resending dropped packets.
To efficiently execute models that comprise all of these behaviors, it is desirable to support: (i) a
numerical solver for continuous-time behavior, (ii) a scheduler for the discrete-time behavior, and (iii) an
event calendar handler for the discrete-event behavior.
Because of the predictability of the discrete-time events and the fixed base rate, discrete-time behavior
as handled by a scheduler can often be conveniently integrated into the numerical solver to comprise a
time-driven execution engine. A getNextEventTime call is typically exploited to tell the solver the time until
which it should solve for the continuous-time behavior.
The discrete-event part is a different matter, though. Because there is no fixed base rate, events may
occur arbitrarily close in time. Halting the numerical solver at each of these points in time quickly becomes
very inefficient. So an event-driven execution engine is preferred.
Rather than integrating the time-driven execution engine that uses a numerical solver and event schedule
with the event-driven execution engine that relies on an event calendar, it is more efficient to combine the
two different execution engines. When combining the two, it is important to first observe that the event-
driven engine may process many events that have no bearing on the time-driven behavior. The time-
and event-driven execution engine can then compute behavior independently until an event is generated
that requires interaction between the two. This requires coordination between the time- and event-driven
execution to ensure the two are synchronized upon communication (Nicolescu et al., 2006).
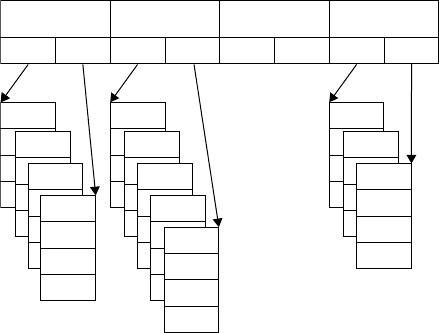
Two possibilities to implement this are illustrated in Figure 15.12. In Figure 15.12(a), the event-driven
behavior shown at the bottom leads the time-driven behavior shown at the top. Behavior generation starts
with processing the events (indicated as vertical arrows) that are registered on the event calendar. When
the first event that has a bearing on the time-driven behavior is processed, a time event is set and the
numerical solver starts integrating up to that point in time, shown at the top. A complication arises when
the continuous-time behavior exceeds a threshold that causes a state event to occur that has a bearing on
the event-driven behavior located in time before the time event that was set. This state event then occurs at
a point in time that the event-driven execution has passed already. So, events that were already processed
have to be retracted and the state of the event-driven behavior has to roll back.
15-16 Handbook of Dynamic System Modeling
The other possibility is illustrated in Figure 15.12(b), where the time-driven behavior leads the event-
driven behavior. In this case, the state event is generated and registered on the event calendar before the
event-driven behavior reaches this point in time and execution control is handed over to the event-driven
behavior to catch up. Now, it may happen that the event-driven behavior sets a time event in the time-
driven execution at a point in time before the state event occurred. This event may cause a change in
continuous-time behavior, and the threshold that caused the state event may never be reached. So, the
time-driven execution engine needs to roll back.
Efficient implementations can be developed based on, for example, employing an interpolation polyno-
mial in the time-driven part to quickly obtain the previous continuous-time state values, so the numerical
integration does not have to be restarted anew, which is an expensive proposition.
Registered
events
Processed
events
Continuous
time
time event
This event
never occurs,
but it is
already
processed!
This sets a
time event
in the
time-driven
solver
This sets an
event in the
event-driven
solver
state even
t
(a)
Registered
events
Processed
events
Continuous
time
state even
t
time event
This sets an
event in the
event-driven
solver
This sets a
time event
in the
time-driven
solver
This event never occurs,
but it is already
processed
(b)
FIGURE 15.12 Combining event-driven and time-driven execution. (a) Event-driven leads and (b) time-driven leads.
Hybrid Dynamic Systems: Modeling and Execution 15-17
15.5 Advanced Topics in Hybrid Dynamic System Simulation
To build on the understanding of the basic elements of a hybrid system, some of the complications that
arise when implementing and combining these elements are explored.
15.5.1 Zero-Crossing Detection
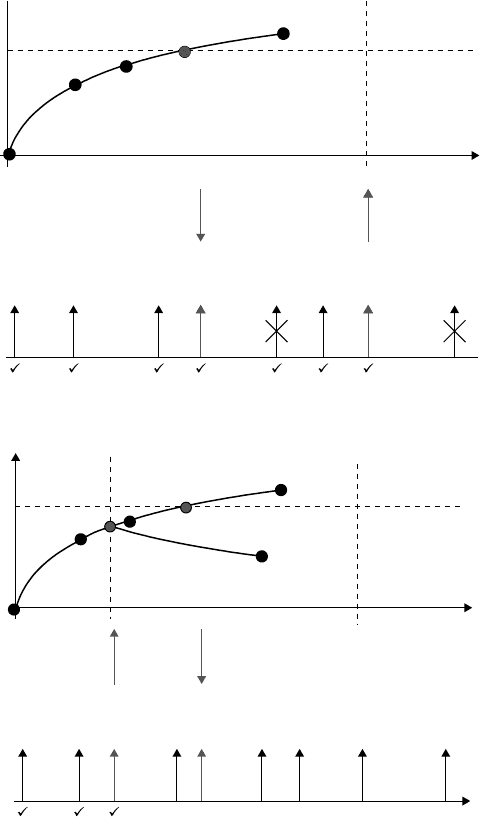
The typical approach to zero-crossing detection compares the sign of a function result and if it changes, it
has crossed zero. This approach may fail if the zero-crossing function has an even number of zeros in the
interval T between the two evaluated points as determined by the numerical integration algorithm. This
is illustrated in Figure 15.13(a). In general, the zero-crossing function, z, is a function of the model state,
but it does not contribute to its continuous dynamics, f . Therefore, numerical integration can proceed
without taking the dynamics of z into account, and when these are faster than the dynamics of f , the
situation with even zeros may arise.
One solution to the even zeros problem is to include the dynamics of z in the model dynamics so the
numerical solver adjusts its step size when too large an error in the zero-crossing function dynamics is
found (Park and Barton, 1996). This does not, however, address the problem of moving outside of the
domain of the zero-crossing function, such as outlined for the square root computation in Section 15.3.3.
0
Zero crossing
Integration points
(a)
Numerical 0
0
(b)
Reinitialization
0
(c)
FIGURE 15.13 Difficulty in zero-crossing detection and location. (a) Even roots, (b) comparing a float, and
(c) discontinuity sticking.
15-18 Handbook of Dynamic System Modeling
To avoid moving outside of a function domain, an alternate approach to event detection relies on a
feedback-control concept. If k is the index of the points in time at which the numerical solver computes
a value, t
k
, then, if k is considered dense rather than discrete, the step size between consecutive points, h,
becomes h(k) =
dt
dk
. This step size can be chosen as
h(k) =−η
z(x)
∂z
∂x
f
(15.14)
to control the step size selection (Esposito et al., 2001). Given the sensitivity of the zero-crossing function,
z, with respect to the step size
dz
dk
=
∂z
∂x
dx
dt
dt
dk
=
∂z
∂x
f
h(k) (15.15)
this results in z behaving as
dz
dk
=−ηz (15.16)
which gradually converges to 0 without actually crossing it. Instead, the solution to Eq. (15.16) is
z(k) =z(0)e
−ηk
, and z(k) approaches 0 exponentially as k tends to infinity. So, the function domain is
never departed. However, this requires a number of additional computations during numerical integration
such as the sensitivity, and, therefore, is computationally less attractive.
Other than exceeding the threshold value, another issue with zero-crossing detection arises when the
zero-crossing function z returns 0 exactly. This does not constitute a crossing, and, therefore, is not detected
as such. Root-finding facilities of numerical solvers may require the function z to actually change sign
between two integration steps to report that a crossing has occurred. For example, when z starts off at
0 and then moves away from it, no zero-crossing event would be generated and consequently no mode
change could occur.
One solution is the use of a zero-crossing function that is not at 0 exactly. Rather, it is chosen to be
− when z is negative and when z is positive, with very small. When −<z <, both zero-crossing
functions, z − and z +, are used.
One effect of this implementation is the need for a “numerical 0”; a ± band around 0 in which the
zero-crossing function is considered to be the 0 value of the sign function.
sign(x) =
⎧
⎨
⎩
−∀
x
(x < −)
0 ∀
x
(− ≤ x ≤ )
+∀
x
(x >)
(15.17)
As long as the zero-crossing function evaluates to a value within the ± band, its sign is considered to be 0.
This approach has an important implication for the analytical correctness of comparing for equality.
If a simulation contains the comparison with zero, x =0, when x is a continuous signal, a zero-crossing
function z(x, u, t) is used to find the value of x that satisfies this equality within a certain tolerance. For
this value, x
, the zero-crossing function has sign 0, whereas the strict equality x =0 may not be satisfied.
Figure 15.13(b) shows how the signal x may therefore cross 0 without having x =0 evaluate to true because
the analytical solution that satisfies this comparison is never evaluated by the numerical integration.
Another issue that is less critical but still causes inefficiencies to occur because of recomputation of the
model variables after the zero crossing has been located. Because of numerical inaccuracies, even if no
changes to the states are made that are used to compute a zero-crossing variable, the return value of the
function may still differ. This is illustrated in Figure 15.13(c), which shows that restarting the simulation
results in a function return value that is slightly different from the computed value immediately before
the zero crossing. Continuing simulation leads to the same zero crossing being detected and located again.
This phenomenon has been referred to as discontinuity sticking (Park and Barton, 1996).
Hybrid Dynamic Systems: Modeling and Execution 15-19
15.5.2 Mode Changes
When a change between modes occurs, the continuous-time state variables may have to be reinitialized
and an immediate consecutive mode change may occur as a result.
15.5.2.1 Reinitialization
An important phenomenon of the general DAE form 0 =f
α
(˙x, x, u, t) is that the system may only be allowed
to move in part of the generalized state space (Verghese et al., 1981). This is the case, for example, when
the power window in Figure 15.2 collides with an object, m
object
, in a perfectly nonelastic manner. After
the collision, the window and object proceed to move with equal velocity, and this leads to the equations
m
object
˙v
object
+m
window
˙v
window
+R
lift
v
window
= ru
motor
v
object
= v
window
˙x
window
= v
window
˙x
object
= v
object
(15.18)
to describe the dynamic behavior. In the form of a matrix pencil (Demmel and Kägström, 1986) with a
forcing function, E ˙x +Ax +Bu =0, this becomes
⎡
⎢
⎢
⎣
m
window
m
object
00
0000
0010
0001
⎤
⎥
⎥
⎦
⎡
⎢
⎢
⎣
˙v
window
˙v
object
˙x
window
˙x
object
⎤
⎥
⎥
⎦
+
⎡
⎢
⎢
⎣
R
lift
000
−1100
−1000
0 −100
⎤
⎥
⎥
⎦
⎡
⎢
⎢
⎣
v
window
v
object
x
window
x
object
⎤
⎥
⎥
⎦
+
⎡
⎢
⎢
⎣
−r
0
0
0
⎤
⎥
⎥
⎦
[
u
motor
] = 0
(15.19)
Here, because of the constraint that v
window
=v
object
, only the part of the state space for which this
constraint holds can be accessed. This implies that there is also a limitation on the reachability in the
x
window
, x
object
space, but this is a nonholonomic constraint rather than it being disallowed.
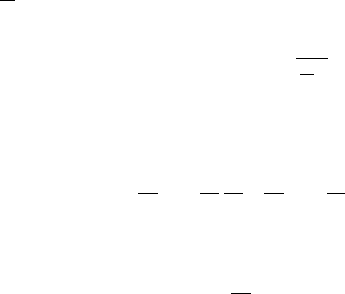
In a generalsense, the reducedstate space can be representedin geometricterms as shown in Figure 15.14.
Here, the system evolves in a mode α
1
until the boundary of a patch is reached. At this point in time, the
system transitions into another mode, but the continuous-time state is not in the allowed space, which is
marked by the thick solid line. To arrive at a consistent situation, the continuous-time state has to be in
the allowed space, and the exact value is computed based on the jump space, which is the space in which
the required instantaneous changes are allowed.
In the linear case, this computation in the jump space corresponds to a projection. This projection can be
computed in several ways (Gantmacher, 1965; Griepentrog and März, 1986; Lewis, 1992; Mosterman, 2000,
2002; van der Schaft and Schumacher, 1996; Verghese et al., 1981). To illustrate the method in Mosterman
(2001), the Weierstrass normal form is derived for the velocity part of the equations in Eq. (15.19). The
x
2
x
2
x
1
2
1
1
2
FIGURE 15.14 A projection. (From Mosterman, P. J. Mode transition behavior in hybrid dynamic systems. In
Proceedings of the 2003 Winter Simulation Conference, pp. 623–631, New Orleans, LA, December 2003 (invited paper).)

15-20 Handbook of Dynamic System Modeling
positions are geometric states that do not change discontinuously, and, therefore, are irrelevant for the
example. This leads to the system of equations
m
window
m
object
00
˙v
window
˙v
object
+
R
lift
0
−11
v
window
v
object
+
−r
0
[
u
motor
] = 0 (15.20)
After applying the following change of basis:
v
window
v
object
=
1 −
m
object
m
window
01
10
−
m
window
m
window
+ m
object
1
¯v
window
¯v
object
(15.21)
the following matrix pencil is arrived at:
m
window
0
00
˙
¯v
window
˙
¯v
object
+
⎡
⎣
0
m
window
m
window
+ m
object
R
lift
0
m
window
+ m
object
m
window
⎤
⎦
¯v
window
¯v
object
+
−r
0
[
u
motor
] = 0 (15.22)
The matrix
m
window
0
00
contains a finite space (top-left entry) [m
window
] and infinite space (bottom-
right entry) [0]. Note that this is an index 1 system of equations, as the infinite space is the null matrix.
Therefore, its nilpotency is 1, and this is also referred to as the index of the system of equations (van
Dijk, 1994). The nilpotency is an indicator of how many stages of substitution are required to compute
all infinite variables. Eq. (15.22) is considered to be of index 1 because the infinite variable, ¯v
object
, can be
computed in one stage, i.e., ¯v
object
=0.
The finite part in Eq. (15.22) consists of ¯v
window
and this can be converted into a regular one-dimensional
ODE by inverting the matrix [m
window
] and left-multiplying. Because it is a regular ODE, there is no
discontinuous change in the variable ¯v
window
,or
¯v
window
=¯v
−
window
(15.23)
where the “−” superscript indicates the final value of ¯v
window
before the mode change (in case of the
initialization before simulation starts, it is the user-supplied initial value).
Now, from v
−
window
and v
−
object
, the value ¯v
−
window
can be computed using the inverse change of basis.
Straightforward computations yield
¯v
−
window
= v
−
window
+
m
object
m
window
v
−
object
(15.24)
which equals ¯v
window
. With ¯v
object
=0 the change of basis can now be applied to yield
v
window
=
1
m
window
+m
object
(m
window
v
−
window
+m
object
v
−
object
) (15.25)
and from v
window
=v
object
, v
object
can be computed. Details on the derivation are available in previous
work (Mosterman, 2000).
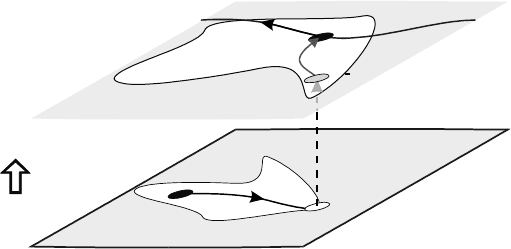
15.5.2.2 Sequences of Mode Changes
After one mode change, γ
α
i+1
α
i
, and computing the initial values of the continuous-state variables in the
new mode, a new transition, γ
α
i+2
α
i+1
, may follow immediately as shown in Figure 15.9 (Mosterman and
Biswas, 1996). The mode change causes a new mode to be arrived at, after which reinitialization is per-
formed again. This process repeats until no further mode changes occur and the system proceeds to evolve
continuously again.
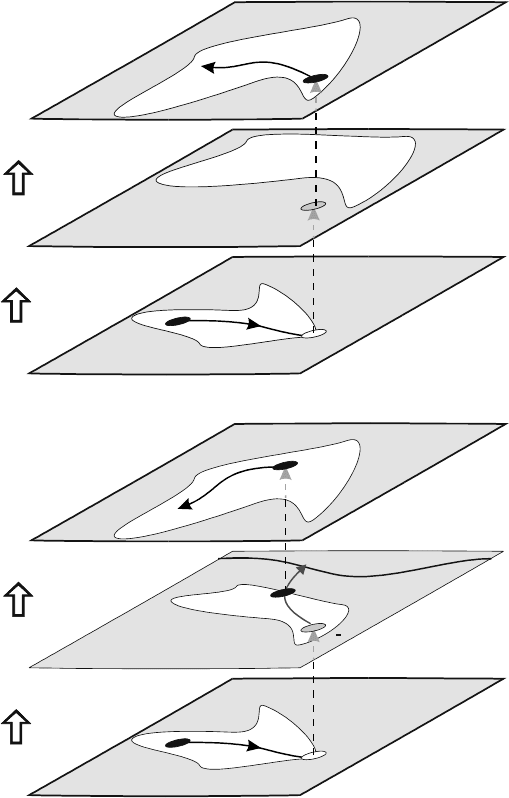
Hybrid Dynamic Systems: Modeling and Execution 15-21
The values of the continuous-time state in modes where there is no continuous-time behavior can be
of two types (Mosterman and Biswas, 1996):
•
When the value does not change from the previous mode, and the mode is a so-called mythical
mode (Figure 15.15(a)).
•
When the reinitialization causes a change in value from the previous mode, which results in an
isolated point, a so-called pinnacle, with no continuous behavior in that mode (Figure 15.15(b)).
In case of sequences of mode transitions, the left-closedness mentioned in Section 15.3.3 may (have to)
be relaxed, though, in particular for sequences of pinnacles. For example, a pressure relief valve may move
through a sequence of opening and closing cycles before the pressure has subsided to below the threshold
for opening the relief valve. In a sufficiently detailed model, this sequence occurs over time, but when small
x
1
2
3
1
x
2
x
3
(a)
2
3
1
2
x
1
2
3
1
x
2
x
2
x
3
(b)
1
2
2
3
FIGURE 15.15 Sequences of mode transitions. (a) State invariance and (b) state reinitialization. (From
Mosterman, P. J. Mode transition behavior in hybrid dynamic systems. In Proceedings of the 2003 Winter Simulation
Conference, pp. 623–631, New Orleans, LA, December 2003 (invited paper).)

15-22 Handbook of Dynamic System Modeling
physical phenomena are not included in the model, for example, to simulate it in real time, this sequence
may occur at one point in time (Mosterman, 2002). Note that this requires the “state” of the system to
include an additional dimension to allow multiple values at one point in time. This can be done by using
pairs that consist of the continuous-time state and an index (Guckenheimer and Johnson, 1995).
An important behavior that is not properly dealt with in simulation tools at present is the crossing of
the patch boundary in an intermediate mode such as in mode α
2
in Figure 15.15(b). The proper value
of the continuous state to be applied for initialization in mode α
3
appears to be the point at which the
projection crosses the patch boundary. However, there may be physical phenomena that are best modeled
with a different semantics. This is still a subject of research.
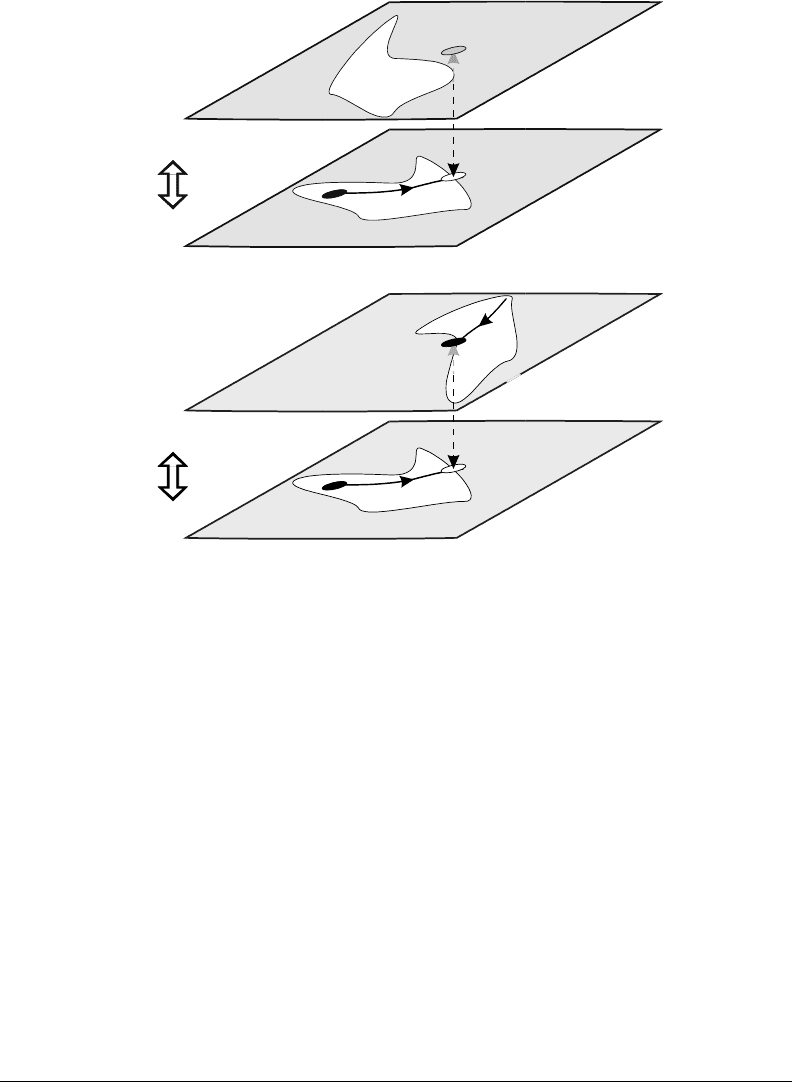
15.6 Pathological Behavior Classes
Once sequences of mode changes occur, models can be constructed that contain loops of mode changes,
i.e., a previously visited mode is revisited, without continuous-time behavior evolving in between.
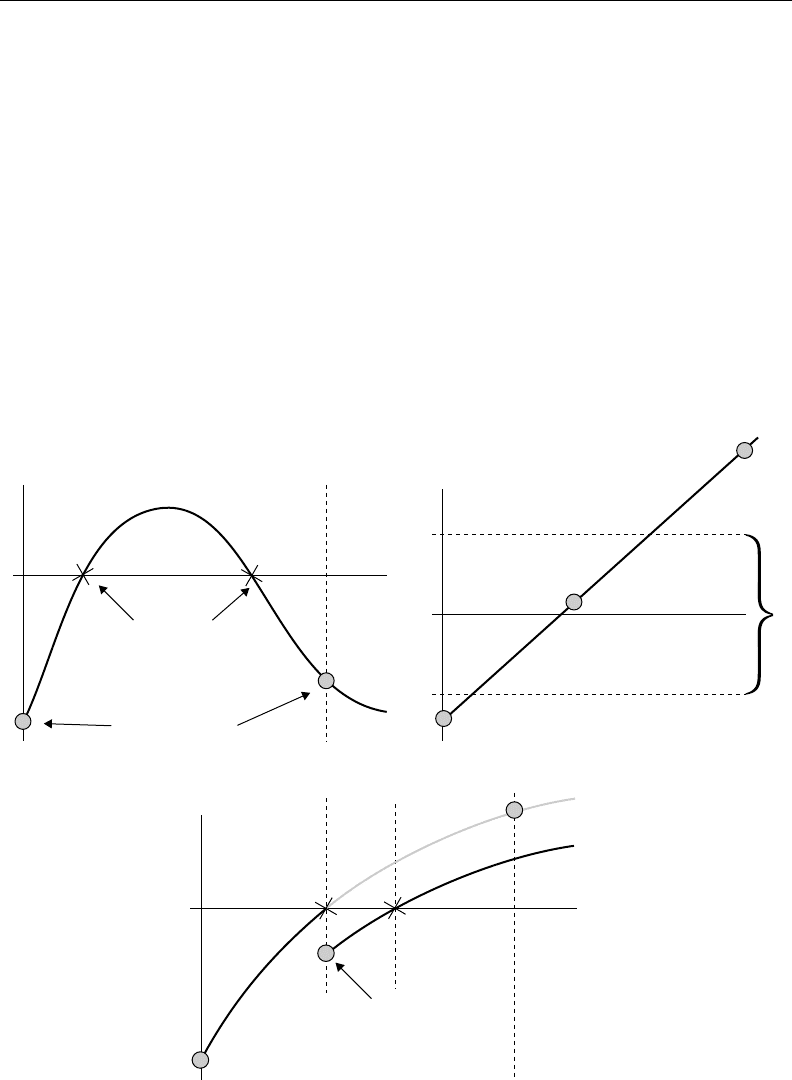
Two classes of behavior are illustrated in Figure 15.16. In Figure 15.16(a), the pathological case is shown
that violates the divergence of time principle (Mosterman and Biswas, 1998). Here, the state is initialized
inside of the patch in mode α
1
. It evolves continuously until it reaches the patch boundary as defined by
γ
α
2
α
1
. When the state x
α
1
is then transferred to mode α
2
, it is outside of the patch as defined by γ
α
1
α
2
(note
the exchange in subscripts of α). This causes the state to be transferred back to α
1
where it is outside of
the patch as defined by γ
α
2
α
1
. Thus, a loop of discrete changes between modes arises.
2
Because these are
instantaneous, no time elapses, and, therefore, the model stops evolving in time. In other words, time does
not diverge. Since this behavior is not observed in physical systems, such behavior is considered the result
of anomalous models of physics.
Similar but different behavior is illustrated in Figure 15.16(b). Here, after reaching the patch boundary
in α
1
, the state transfers onto the patch boundary in α
2
as defined by γ
α
1
α
2
(note again the exchange in
subscripts of α). Because it is the patch boundary, the state transfers back to α
1
after an infinitesimal step
in time. This step results in a value x
α
1
that may be immediately inside the patch in α
1
as defined by γ
α
2
α
1
and so another infinitesimal step will transfer the state back to α
2
.
3
Far-fetched and pathological as it may seem, this behavior, referred to as chattering or sliding mode
behavior, is actually aimed for by robust control design methodologies (Utkin, 1992) (e.g., it is used in
antilock braking systems), as it is relatively insensitive to plant model parameter variations. Unlike the
behavior in Figure 15.16(a), here the state does continue to evolve in time and the divergence of time
principle is satisfied. To efficiently derive the actual behavior along the switching surface as defined by the
patches in mode α
1
and α
2
, two methods can be applied: (i) equivalence of control (Utkin, 1992) and
(ii) equivalence of dynamics (Filippov, 1960; Mosterman et al., 1999). Although there are classes of models
for which these “regularizations” result in the same behavior, in general they may differ.
Finally, another class of pathological behaviors can be identified, namely Zeno behavior.
4
Behaviors that
are Zeno do progress in time by a noninfinitesimal value each time a mode transition occurs. However,
this time reduces upon each transition as a converging series. For example, in case the time is halved upon
each transition, the transition series converges to a limit value in time
t
f
=
i
1
2
i
(15.26)
that is never exceeded. In case the bounce-back of the window in the hybrid automaton in Figure 15.8(b)
does not include the threshold clause, the bounce transition would be taken indefinitely, with shorter
2
Note that a loop may involve any finite number of modes.
3
Note how left-closedness is violated in this particular instance of behavior. In general, an infinitesimal “hysteresis”
effect may be present to guarantee left-closedness again.
4
Named after the Greek philosopher Zeno who studied the relation between points and intervals, i.e., whether an
interval is an infinite collection of points.
Hybrid Dynamic Systems: Modeling and Execution 15-23
2
1
x
1
x
2
(a)
1
2
2
1
2
1
x
1
(b)
1
2
2
1
x
2
FIGURE 15.16 Recurring mode transitions. (a) Nondivergent and (b) sliding. (From Mosterman, P. J. Mode transi-
tion behavior in hybrid dynamic systems. In Proceedings of the 2003 Winter Simulation Conference, pp. 623–631, New
Orleans, LA December 2003 (invited paper).)
and shorter intervals of time in between. Depending on the coefficient of restitution, η, the new interval
between bounces would be a fraction of the present one. The increasingly smaller intervals would converge
to a limit point in time beyond which time would not progress. Therefore, although time diverges locally,
it does not do so globally.
It is now possible to compare the three mode revisiting behaviors.
•
Divergence of time: infinitely many discrete steps in zero time. Time remains the same.
•
Chattering: infinitely small time steps. Evolves past any value in time.
•
Zeno: infinitely many time steps in a finite, nonzero, time interval. Does not evolve past a limit point
in time.
Note that, although it is important to clearly distinguish between these three behaviors, often Zeno is used
as an all-encompassing term that includes each of these (e.g., behavior that is locally not divergent in time
is often called Zeno as well).
15.7 Conclusions
This chapter presented an overview of the field of numerical simulation for hybrid dynamic systems. It
discussed the basic parts of continuous-time behavior generation, event detection and location, mode
transitions, and reinitialization that are needed and how they combine together.
The implementation was shown to be potentially based on a numerical integrator scheme, use of a
statically compiled schedule, and use of a dynamically kept event calendar. In some cases, it may be