Фарзане Н.Г., Илясов Л.В. Технологические измерения и приборы
Подождите немного. Документ загружается.

391
(см. рис. 10.2, г или 11.2, а), сигнал которого интегрируется и запоминается на
один цикл работы анализатора вычислительным устройством 9.
Унифицированный выходной сигнал последнего, пропорциональный массе или
объему выкипевших при данной температуре нагревателя 12 фракций,
измеряется и регистрируется потенциометром или вторичным пневматическим
прибором 10 в зависимости от электрического или пневматического
исполнения анализаторов.
Дозатор и детектор размещены в термостате 14. Путем подачи
электроэнергии или пара регулятор 11 поддерживает постоянной температуру
нагревателя 12. Эту температуру принимают равной температуре, при которой
измеряется выкипаемость анализируемого вещества.
В данном анализаторе расход анализируемого вещества 4000— 5000 см
3
/ч,
расход газа-носителя 2000—4000 см
3
/ч (зависит от типа детектора),
продолжительность одного цикла 5 мин, класс точности 3.
Испаряемость жидких веществ, используемых в качестве топлива, является
одной из важнейших
характеристик, определяющих их
моторные свойства.
Исключительно важна роль
испаряемости для нормального
протекания процесса горения
топлива в карбюраторных
дизельных реактивных двигателях,
так как процессу горения топлива
в них предшествует процесс его
распыления, имеющий целью
испарение топлива. От
испаряемости топлива зависит
образование паровоздушных
пробок в трубопроводах
двигателей и явление кавитации в насосах при перекачке топлива. Учет
испаряемости очень важен при хранении топлива. Испаряемость определяется
количеством (объемом или массой) паров, испаряющихся с единицы
поверхности жидкости в единицу времени. Приближенно об испаряемости
судят по фракционному составу, однако этого во многих случаях недостаточно.
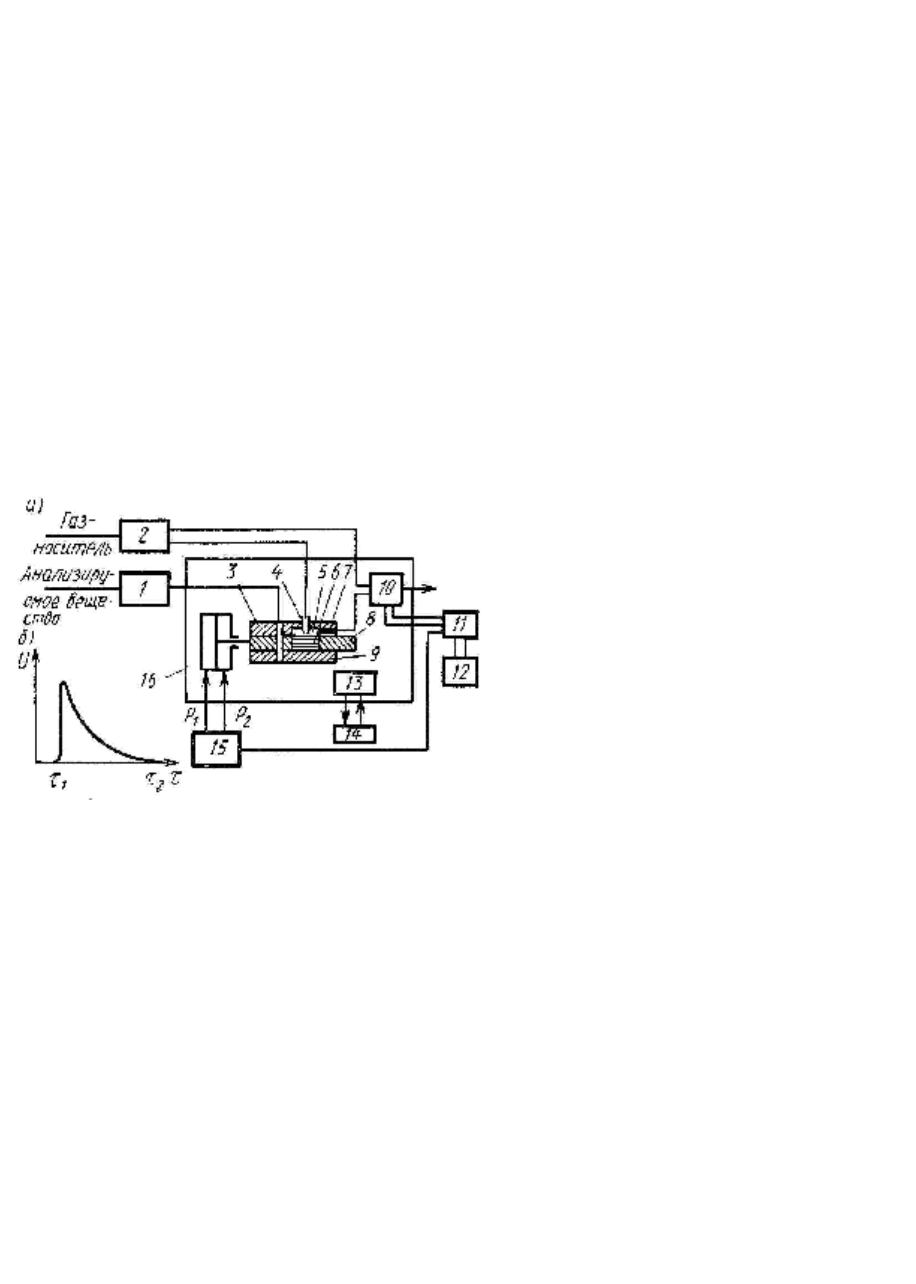
На рис. 13.8, а приведена схема автоматического анализатора ис-
паряемости. Он реализует эвапорографический метод анализа испаряемости и
работает циклически. В режиме работы «Подготовка» анализируемое вещество
из блока подготовки 1 поступает в автоматический дозатор с мембранным
приводом. При этом подвижная пластина 8 находится в крайнем левом (на
рисунке) положении и отверстие 6, ко-
Рис. 13.8. Схемы автоматических анализаторов
испаряемости

392
торое является дозируемым объемом, промывается анализируемым веществом.
После завершения режима «Подготовка» под действием пневматических
сигналов Р
1
и Р
2
, поступающих от блока управления 15, подвижная пластина 8
перемещается в крайнее правое положение, отверстие 6, заполненное
анализируемым веществом, совмещается с полостью 5 в неподвижной
пластине 3. Начинается режим работы «Анализ». Поток газа-носителя,
поступающий из блока подготовки газов 2 через сопло 4 перпендикулярно
поверхности анализируемой жидкости, постепенно испаряет ее при темпе-
ратуре, несколько меньшей температуры начала перегонки. Испаряющиеся
фракции выводятся через штуцер 7 газом-носителем и транспортируются в
равночувствительный газовый детектор 10 (см. гл. 11, 12). Сигнал U
последнего при постоянном объемном расходе газа-носителя и постоянной
площади поперечного сечения отверстия 6 пропорционален в каждый момент
времени мгновенной объемной скорости испарения и для нефтяных топлив
имеет форму кривой, называемой эвапорограммой (рис. 13.8,6).
Вычислительное устройство 11 определяет площадь сигнала,
продолжительность испарения, т. е. разность (τ
2
— τ
1
), и отношение указанной
площади к продолжительности испарения. Унифицированный выходной сигнал
вычислительного устройства пропорционален средней за отрезок времени (τ
2
—
τ
1
) объемной скорости испарения, принимаемой в качестве характеристики
испаряемости нефтяных топлив. Этот сигнал измеряется и регистрируется
потенциометром или вторичным пневматическим прибором 12 (в зависимости
от электрического или пневматического исполнения анализатора). Дозатор и
детектор размещены в термостате 16, температура в котором стабилизируется
регулятором 14 путем подачи электрической энергии или пара к нагревателю
13.
Расход анализируемого вещества 4000—5000 см
3
/ч, расход газа-носителя
(воздух или водород) 2000—40 000 см
3
/ч (зависит от типа детектора),
продолжительность одного цикла 5 мин, класс точности 3.
§ 13.5. Средства измерений температуры вспышки
Температурой вспышки называют температуру жидкости, при которой ее
пары при определенных условиях нагревания образуют с окружающим
воздухом смесь, вспыхивающую при поднесении к ней пламени. По мере
нагревания жидких нефтепродуктов увеличивается содержание их паров в
смеси «воздух—пар», образующейся над поверхностью нефтепродукта. При
поднесении пламени к этой смеси происходит взрыв, а дальнейшего горения
нефтепродуктов не возникает из-за отсутствия сразу после взрыва его паров в
воздухе. Для различных нефтепродуктов вспышка возникает примерно при
одних и тех же объемных концентрациях паров в смеси «воздух—пар».
393
В настоящее время температура вспышки является нормируемым
показателем качества для смазочных масел, дизельных, котельных и
реактивных топлив, осветительных и тракторных керосинов, бензинов-
растворителей и других продуктов. Этот показатель качества является наиболее
часто определяемым на нефтеперерабатывающих предприятиях.
По температуре вспышки определяют содержание низкокипящих фракций
в нефтепродукте. Этот показатель характеризует также огнеопасность
нефтепродуктов. Уменьшение температуры вспышки соответствует
увеличению концентрации легких фракций и увеличению огнеопасности
нефтепродуктов.
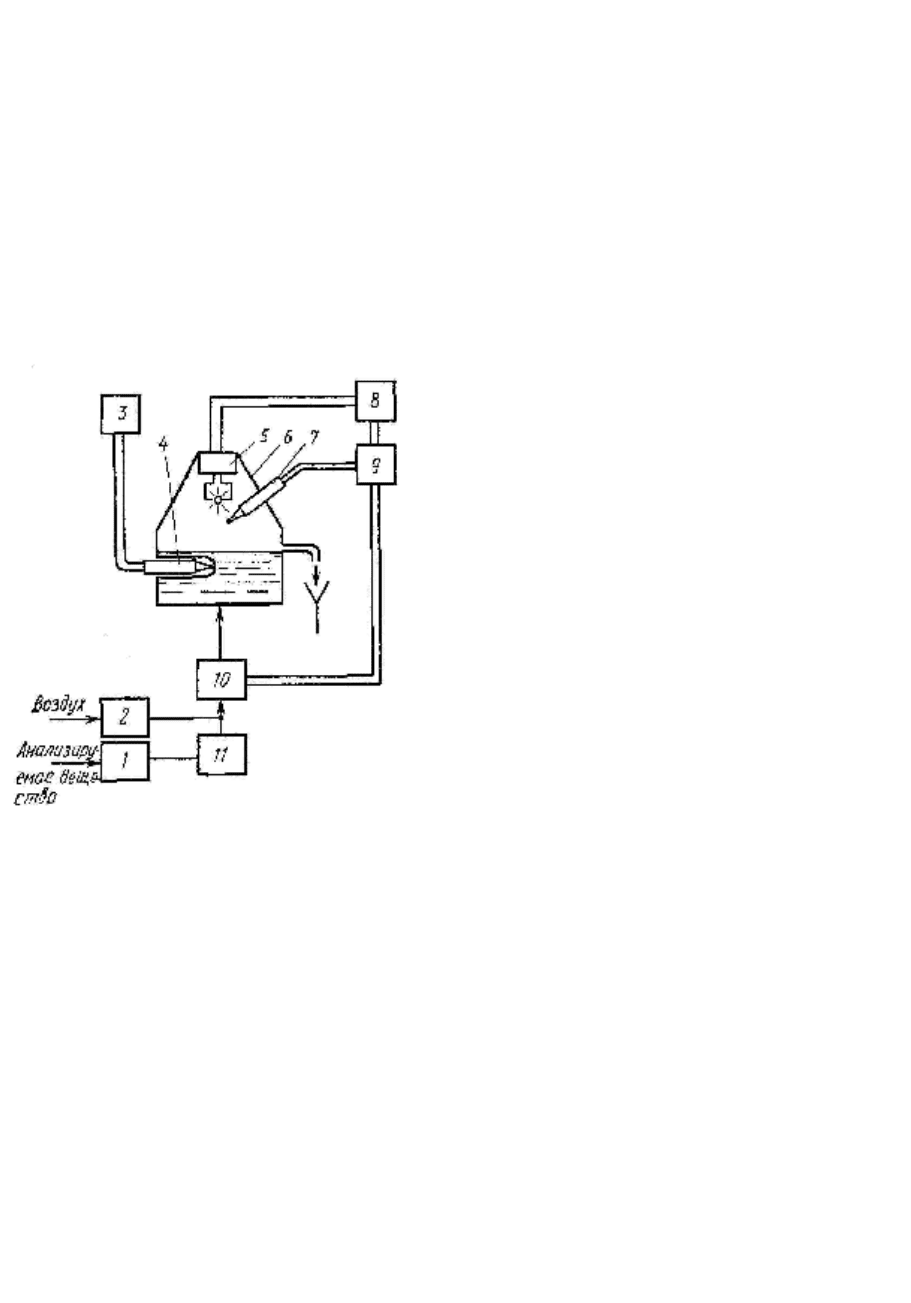
Температуру вспышки определяют путем анализа в открытом или
закрытом тигле. Последний метод анализа
дает более воспроизводимые результаты.
Поэтому он используется в
автоматическом анализаторе температуры
вспышки, схема которого показана на рис.
13.9. Анализируемое вещество из блока
подготовки 1 с постоянным объемным
расходом поступает в предварительный
нагреватель 11, на выходе которого к
потоку анализируемого вещества приме-
шивается поток воздуха, поступающий с
постоянным объемным расходом из блока
подготовки 2. Образовавшаяся смесь
поступает в
основной нагреватель 10, а из него — в
камеру вспышки 6. Если температура
смеси, поступающей в камеру 6, достигает
температуры вспышки, то происходит
вспышка паровоздушной смеси от
электрической искры, создаваемой свечой 5,
к которой от генератора 8 периодически (с интервалом 7 с) подается
высоковольтное напряжение.
Наличие пламени вспышки изменяет температуру в паровом пространстве
камеры 6, что воспринимается термоэлектрическим чувствительным элементом
7. Сигнал элемента 7 подается в блок управления 9, который отключает
электропитание основного нагревателя 10. Включение нагревателя 10
производится не раньше, чем будет подана искра, следующая за искрой,
вызывающей вспышку. Если произойдет несколько вспышек подряд, то
нагреватель 10 остается отключенным. Включение нагревателя 10 произойдет
после первой искры, при которой не возникнет вспышки. Таким образом, в
камере 6 автоматически поддерживается температура анали-
Рис. 13.9. Схема автоматического анали
затора
температуры вспышки

394
зируемого вещества на значении, при котором происходит вспышка смеси
«воздух — пар».
Температура анализируемого вещества в камере измеряется
термоэлектрическим чувствительным элементом 4, сигнал которого
воспринимается электронным потенциометром или нормирующим
преобразователем 3.
Расход анализируемого вещества 5000 см
3
/ч, диапазоны измерений
температуры вспышки 0—150, 150—300°С; основная погрешность ±(1—3)°С (в
зависимости от диапазона измерений), время реакции 15 мин.
§ 13.6. Средства измерений октанового числа
Октановое число является характеристикой антидетонационных качеств
топлив. Оно измеряется в основном для бензинов, таким образом определяется
пригодность бензина для использования в двигателях внутреннего сгорания. По
этому показателю качества осуществляется процесс компаундирования
(смешения) бензинов на предприятиях нефтеперерабатывающей
промышленности.
Под октановым числом понимают показатель детонационной стойкости
топлив (в том числе бензина), численно равный такому процентному (по
объему) содержанию изооктана в смеси с нормальным гептаном, при котором
детонационные стойкости этой смеси и сравниваемого с ней испытуемого
топлива одинаковы.
В лабораторной практике измерение октанового числа осуществляется так
называемым моторным методом на специальных двигателях внутреннего
сгорания. В основу работы автоматического анализатора октанового числа
положено явление возникновения свечения — электромагнитного излучения
(так называемое «холодное пламя») при нагревании смеси воздуха и паров
нефтяных топлив до температуры порядка 300°С. Это явление связано с час-
тичным окислением паров топлива. Причем свечение сопровождается
выделением небольшого количества тепловой энергии. Исследование этого
явления позволило установить, что как само свечение, так и выделение
тепловой энергии находятся в зависимости от октанового числа.
На рис. 13.10, а показана схема автоматического анализатора октанового
числа, основанного на тепловом эффекте явления «холодного пламени». В этом
анализаторе анализируемое вещество (бензин) поступает из блока подготовки 1
через управляемый переключатель 14, миниатюрный насос 13 и нагреватель 12
в дозатор 5. В этот же дозатор 5 из блока подготовки газа 3 и нагреватель 4 с
постоянным объемным расходом поступает воздух. Согласование работы всех
блоков анализатора во времени осуществляется с помощью устройства
управления 11 (связи его с другими блоками анализатора не показаны).
Анализатор является устройством циклического действия и имеет три
режима работы: «Подготовка», «Анализ» и «Градуиров-

395
ка». Большую часть времени анализатор работает в режимах «Подготовка» и
«Анализ». Перед началом режима работы
анализатора «Подготовка» по команде
устройства управления 11 дозатор
устанавливается в режим отбора пробы. В
этот период реактор 6, размещенный в
термостате при температуре 300°С,
продувается воздухом. Режим
«Подготовка» длится 4 мин. После его за-
вершения по команде устройства
управления 11 дозатор и весь анализатор
переключается в режим работы «Анализ».
Проба анализируемого вещества вводится
потоком воздуха в реактор, выход
реактора автоматически закрывается и
проба испаряется. В процессе испарения
температура в реакторе 6, измеряемая
термоэлектрическим чувствительным
элементом 7, несколько уменьшается, а
затем восстанавливается. На рис. 13.10, б
показаны изменения сигнала элемента 7
во времени за один цикл работы
анализатора. Через отрезок времени Δτ
и
с момента ввода пробы, называемый
индукционным периодом и длящийся несколько секунд, начинается реакция
частичного окисления паров бензина. При этом температура смеси в реакторе
увеличивается, достигает максимума, а затем постепенно падает (рис. 13.10,
б). Реакция частичного окисления длится 10—15 с.
Как значение Δτ
и
, так и максимальное значение изменения температуры,
представляемое изменением сигнала ΔU
max
термоэлектрического
чувствительного элемента, связаны с октановым числом. В анализаторе (рис.
13.10, а) для измерения октанового числа используется информация о
максимальном увеличении температуры в процессе реакции частичного
окисления. Для этого сигнал термоэлектрического чувствительного элемента 7
преобразуется нормирующим преобразователем 8 в унифицированный сигнал,
который поступает в устройство обработки информации 9, принцип действия
которого аналогичен принципу действия устройств для обработки
хроматограмм по высоте пиков (см. § 12.3). Выходной электрический или
пневматический сигнал (в зависимости от типа используемого устройства 9)
регистрируется самопишущим прибором 10.
Рис. 13.10. Схема автоматического
анализатора октанового числа

396
Через несколько циклов измерения октанового числа анализируемого
вещества по команде устройства управления 11 с помощью переключателя 14
на вход насоса 13 подается образцовое топливо из резервуара 2 и
осуществляется его анализ. По результатам измерения октанового числа
образцового топлива автоматически корректируется коэффициент
преобразования преобразователя 8.
Продолжительность одного анализа 5 мин, диапазон измерений 3—10
единиц октанового числа, погрешность ±0,2 единиц октанового числа; расход
анализируемого вещества 300 см
3
/ч, объем пробы 12·10
-3
см
3
; расход
образцового вещества 200 см
3
/сут.

397
ГЛАВА 14
ПРИМЕНЕНИЕ ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ В
СРЕДСТВАХ ТЕХНОЛОГИЧЕСКИХ ИЗМЕРЕНИЙ
§ 14.1. Общие сведения
При выполнении технологических измерений в ряде случаев возникает
необходимость проведения различных вычислительных операций, связанных с
определением значений измеряемых величин и погрешностей измерений.
Кроме того, для рациональной организации процесса автоматического
контроля технологических параметров требуется выполнение различных
логических операций.
Эти задачи решаются с помощью средств вычислительной техники —
вычислительных устройств.
Вычислительные устройства принято подразделять на устройства
непрерывного (аналоговые) и дискретного (цифровые) действия.
В аналоговых вычислительных устройствах значения величин, над
которыми осуществляются математические операции, изменяются непрерывно.
Они изображаются в определенном масштабе в виде других физических
величин, например напряжения, тока, давления сжатого воздуха и т. д.
Результат выполнения математических операций в аналоговых устройствах
получается сразу после ввода исходных данных.
Аналоговые вычислительные устройства отличаются простотой и
сравнительно небольшой стоимостью. Их недостаток — ограниченная точность
вычислений (погрешность не менее ±0,1—0,5%).
В цифровых вычислительных устройствах значения величин, над
которыми осуществляются математические операции, представляются в виде
набора цифр. Каждая цифра, соответствующая определенному разряду числа,
устанавливается на отдельном цифровом элементе: триггере, счетном колесе и
др.
Все вычислительные операции в цифровых вычислительных устройствах
сводятся к арифметическому сложению и выполняются в течение некоторого
промежутка времени.
В процессе выполнение математической операции значения исходных
данных не изменяются. Новые выходные данные вводятся в цифровое
вычислительное устройство лишь спустя некоторое время, необходимое для
выполнения вычислений при прежних данных. Таким образом, цифровые
вычислительные устройства работают прерывно во времени (дискретно).
Цифровые вычислительные устройства отличаются практически

398
неограниченной точностью, большими логическими возможностями и
значительным быстродействием.
Аналоговые вычислительные устройства уже давно и широко применяются
в средствах технологических измерений для обработки сигналов
измерительной информации. Однако из-за ограниченной точности их
применение оказывается целесообразным только при реализации относительно
простых алгоритмов.
В настоящее время обработка информации, в том числе и измерительной,
все больше базируется на цифровых вычислительных устройствах.
Можно выделить два вида цифровых вычислительных устройств,
включаемых в средства измерений: устройства с жесткой программой
обработки информации и устройства с изменяемой программой обработки
информации. Первые из названных устройств имеют жесткую структуру, кото-
рая определяется принятой программой обработки информации, составленной
в соответствии с реализуемыми функциями. Любое изменение реализуемой
функции требует изменения структуры вычислительного устройства. Эти
цифровые вычислительные устройства, как и аналоговые, имеют узкую
специализацию.
От этого недостатка свободны цифровые вычислительные устройства с
изменяемой программой обработки информации, позволяющие решать любые
вычислительные задачи. Эти устройства представляют собой цифровые
электронные вычислительные машины—ЭВМ, миниЭВМ, микроЭВМ,
микропроцессоры (МП).
В измерительных приборах, преобразователях и системах, используемых
для технологических измерений, находят применение микроЭВМ и
микропроцессоры. Технической базой этих устройств являются большие и
сверхбольшие интегральные схемы (БИС и СБИС), содержащие 10
3
—10
б
элементов на одном кристалле.
Наиболее существенным достижением микроэлектроники и вы-
числительной техники в последнее время является создание на основе БИС
микропроцессоров.
Первая микропроцессорная БИС была создана за рубежом в 1971 г. и сразу
привлекла к себе внимание специалистов-разработчиков средств
вычислительной техники и цифровой автоматики перспективами широкого
применения, обеспечиваемыми возможностью ее программного управления.
Появление микропроцессоров расценивается в настоящее время экспертами в
области электроники и вычислительной техники как революционное явление,
соизмеримое по своей значимости с появлением в 50-х годах первых полу-
проводниковых элементов и устройств.
Микропроцессор — функционально законченное, управляемое хранимой в
памяти программой (большей частью малоразрядное) устройство обработки
цифровой информации, выполненное в виде одной или нескольких БИС или
СБИС. Это устройство называют микропроцессором, так как оно по своим
обычным функциям и структуре напоминает упрощенный вариант процессора
обычных
399
ЭВМ. Миниатюрность, малая масса и малое потребление энергии открыли
возможность включения микропроцессора непосредственно в электронную
схему измерительных устройств, средств автоматического регулирования и
управления. Микропроцессор намного дешевле, более экономичен в работе и
надежен, чем процессоры, построенные на интегральных схемах малого и
среднего уровня интеграции. В силу того что основой микропроцессора
является БИС или СБИС с программируемой логикой, он заменил собой
многие типы интегральных схем с жесткой, фиксированной логикой.
Изменением программы микропроцессора достигается возможность решения
с его помощью множества разнообразных задач.
Микропроцессор используется обычно в составе микропроцессорного
комплекта (набора), представляющего собой совокупность специально
разработанных отдельных микропроцессорных и других интегральных схем,
которые совместимы по своим конструктивно-технологическим данным и
могут быть собраны в единое целое. В состав комплекта входят
интегральные схемы: микропроцессора, запоминающих устройств, ввода—
вывода информации, микропрограммного управления и др.
Микропроцессорные комплекты предназначены для построения
цифровых управляющих вычислительных устройств с широкими
функциональными возможностями и единым математическим обеспечением,
таких, как микропроцессорные системы, микроЭВМ, микроконтроллеры и
др.
Микропроцессорная система — это собранная в единое целое со-
вокупность взаимодействующих интегральных схем микропроцессорного
комплекта, организованная в работающую систему, т. е. вычислительная или
управляющая система с микропроцессором в качестве узла обработки
информации.
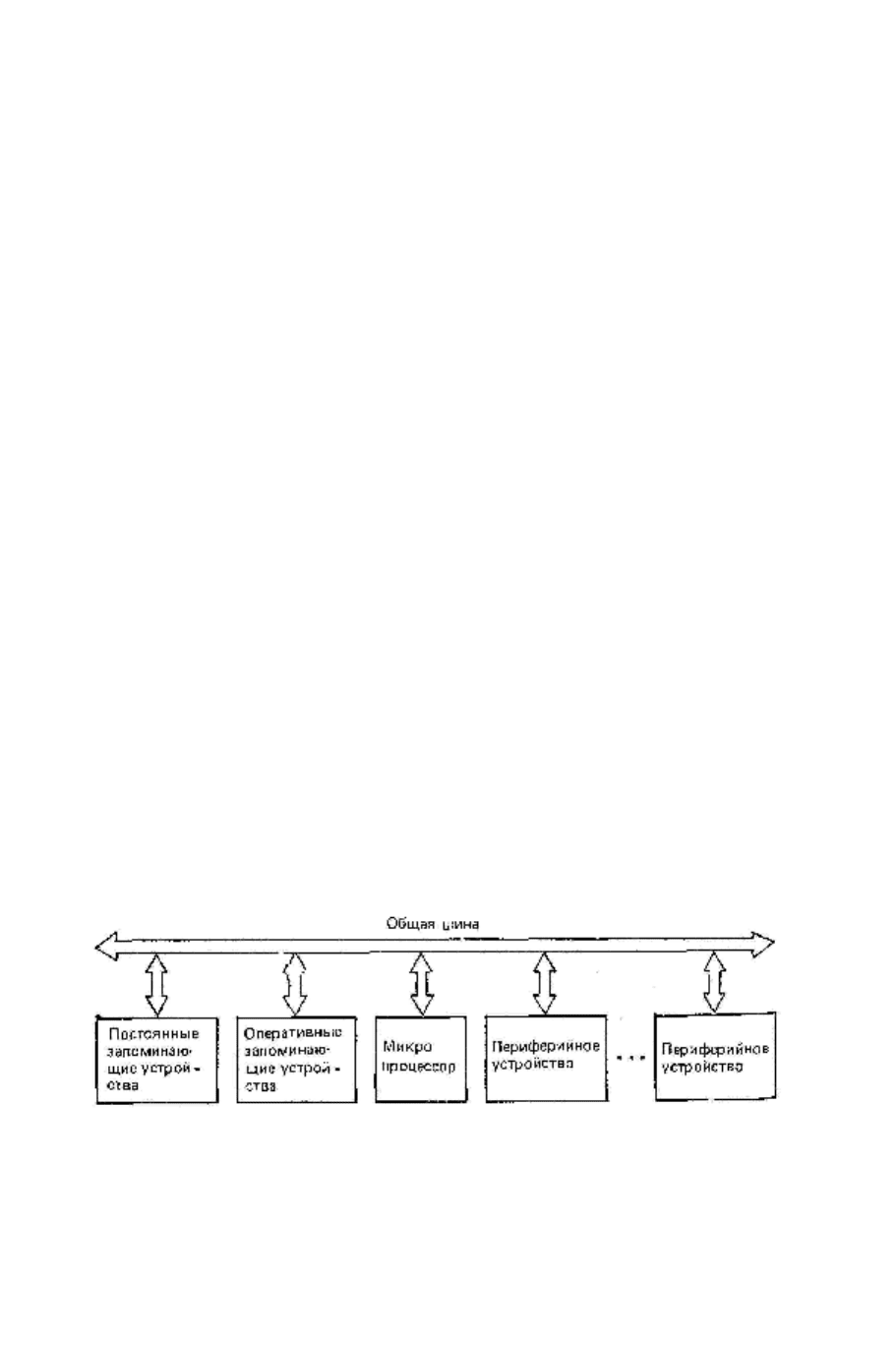
МикроЭВМ — это конструктивно законченное вычислительное
устройство, построенное на основе микропроцессорного комплекта
интегральных схем в отдельном
Рис. 14.1. Структурная схема микроЭВМ
корпусе и имеющее источник питания, пульт управления, узлы ввода—
вывода информации, что позволяет использовать его в качестве автономного
независимо работающего устройства со своим программным обеспечением.
Микро-

400
ЭВМ строят по структуре более простой, чем обычные ЭВМ. Основу этой
весьма гибкой структуры, называемой магистрально-модульной (рис. 14.1),
составляет общая магистраль (общая шина), к которой подсоединяются в
требуемой номенклатуре и количестве все устройства машины, выполненные в
виде конструктивно законченных модулей, связанных друг с другом с
помощью интерфейсов.
Интерфейс (от англ. inteface — взаимосвязь) представляет собой
совокупность линий и шин сигналов, электронных схем и алгоритмов,
предназначенную для осуществления обмена информацией между
устройствами цифровой вычислительной техники.
Микроконтроллер (контроллер) — устройство логического управления,
выполненное на основе микропроцессоров или микроЭВМ.
§ 14.2. Ввод измерительной информации о технологических параметрах
в устройства цифровой вычислительной техники
Как отмечалось, современные средства измерений технологических
параметров имеют выходные сигналы в виде постоянного тока, частоты и
давления, т. е. являются аналоговыми. Для ввода этих сигналов в средства
цифровой вычислительной техники необходимо использовать
соответствующие согласующие устройства (или устройства сопряжения).
Общая задача, решаемая при этом, состоит в преобразовании сигналов
первичных измерительных преобразователей ПИП в электрический кодовый
сигнал, воспринимаемый средствами вычислительной техники. Наиболее
типичные структурные схемы устройств, используемых для согласования
работы средств измерений технологических параметров и средств
вычислительной техники, показаны на рис. 14.2.
Преобразование электрического сигнала постоянного тока I в кодовый
осуществляется с помощью аналого-цифрового преобразователя АЦП (рис.
14.2, а, б), а в сигнал частоты f — с помощью частотно-цифрового
преобразователя ЧЦП (рис. 14.2, в, г). Если названные преобразователи (см.
приложение 1) используются для преобразования сигналов нескольких
первичных измерительных преобразователей, например ПИП
1
—ПИП
п
, то
сигналы поочередно подводятся к АЦП (рис. 14.2, б) через электрический
коммутатор ЭК. Для преобразования сигналов давления Р сжатого воздуха,
вырабатываемых пневматическими ПИП, обычно используется
предварительное преобразование давления в электрический сигнал
постоянного тока (рис. 14.2, д, е, ж) с помощью пневмоэлектриче-ского
преобразователя ПЭП. При этом если один ПЭП и один АЦП применяются для
преобразования сигналов нескольких ПИП, то поочередное подключение ПИП
к ПЭП осуществляется с помощью пневматического коммутатора ПК (рис.
14.2, е). Если же для преобразования сигнала каждого пневматического ПИП
используется индивидуальный ПЭП, то с помощью ЭК (рис. 14.2, ж)
поочередно осуществляется подключение ПЭП
1
—ПЭП
п
к АЦП.