Fabien B. Analytical System Dynamics: Modeling and Simulation
Подождите немного. Документ загружается.


228 5 Numerical Solution of ODEs and DAEs
−h
s
X
i=1
ˆ
b
i
k
i
− hˆγf(ˆy
(k+1)
, t
(k+1)
) = 0.
Taking y
(k+1)
as the estimate of the solution, the simplified Newton’s method
gives
ˆy
(k+1)
= y
(k+1)
+ h [I − hˆγJ]
−1
(
s
X
i=1
(
ˆ
b
i
− b
i
)k
i
+
ˆ
b
0
f(y
(k)
, t
(k)
) + ˆγf(y
(k+1)
, t
(k+1)
)
)
= y
(k+1)
+ [I − hˆγJ]
−1
(
s
X
i=1
e
i
Z
i
+ h
ˆ
b
0
f(y
(k)
, t
(k)
)
+ hˆγf(y
(k+1)
, t
(k+1)
)
)
, (5.29)
where [e
1
, e
2
, ···, e
s
] = [(
ˆ
b
1
−b
1
), (
ˆ
b
2
−b
2
), ···, (
ˆ
b
s
−b
s
)]A
−1
. Also, we use
the approximation ∂f(ˆy
(k+1)
, t
(k+1)
)/∂y ≈ J = ∂f(y
(k)
, t
(k)
)/∂y. Thus, the
local error estimate is
η
(k+1)
= y
(k+1)
− ˆy
(k+1)
= −[I − hˆγJ]
−1
(
s
X
i=1
e
i
Z
i
+ h
ˆ
b
0
f(y
(k)
, t
(k)
)
+ hˆγf(y
(k+1)
, t
(k+1)
)
)
. (5.30)
In the case of the Radau IIA, s = 3 method η
(k+1)
= O(h
s+1
) = O(h
4
).
Using (5.30) the step size can be adjusted as
σ =
v
u
u
t
1
n
n
X
i=1
|η
(k+1)
i
|
atol
i
+ rtol
i
|y
(k+1)
i
|
!
2
−1/4
¯
h = h min(fac
1
, max(fac
0
, βσ)). (5.31)
where atol ∈ R
n
is the absolute error tolerance, rtol ∈ R
n
is the relative
error tolerance, and the step size adjustment parameters 0 < β < 1, fac
1
>
fac
0
> 0. As discussed in the previous section, if the local error estimate
satisfies the desired tolerance, the new step size at t
(k+1)
is
¯
h ≥ h. Otherwise,
the integration from t
(k)
is repeated with a new step size
¯
h < h.
With these ingredients an implicit Runge-Kutta method for the solution
of the ODE (5.1)-(5.2) can be implemented as outlined in Algorithm 5.2.3.
5.3 Numerical Solution of DAEs 229
Starting at t = t
i
the algorithm executes the loop defined by steps 2 through
20 until t = t
f
. In step 3 the algorithm solves the equations (5.22) via the
simplified Newton’s method. For these Newton iterations we use Z
(0)
= 0
however, other initial estimates are possible (see Section 5.3.5 below, and
Olsson and S¨oderlind, (1998)). If the simplified Newton’s iterations fail to
converge the step size is reduced by a factor 0.5 and the Newton’s iterations
are repeated. If the Newton’s iterations converge then the local error estimate
is computed along with a new step size
¯
h. If the local error is sufficiently
small, i.e., σ ≤ 1, then the solution advances to time t + h with y(t + h) = ¯y.
Otherwise, if σ > 1 the equations (5.22) are solved again at time t, with a
new step size
¯
h < h.
Algorithm 5.2.3 Implicit Runge-Kutta Method
Input: An initial time t
i
, a final time t
f
, the initial condition y(t
i
), an initial step size
h
0
, absolute error tolerance atol ∈ R
n
, relative error tolerance rtol ∈ R
n
, step size
adjustment parameters 0 < β < 1, fac
1
> fac
0
> 0, the minimum allowable step size
h
min
, and the maximum allowable number of iterations MAX ITER > 0.
Output: y(t
f
)
1: y = y(t
i
), t = t
i
, and h = h
0
2: for ITER = 0, 1, · · · , MAX ITER do
3: if the simplified Newton’s method, (5.24), converges then
4: ¯y = y +
P
s
i=1
d
i
Z
i
5: η = − [I − hˆγJ]
−1
P
s
i=1
e
i
Z
i
+ h
ˆ
b
0
f(y, t) + hˆγf (¯y, t + h)
6: σ =
q
1
n
P
n
i=1
|η
i
|
atol
i
+rtol
i
|¯y
i
|
2
−1/4
7:
¯
h = h min(fac
1
, max(fac
0
, βσ))
8: if σ ≤ 1 then
9: if t = t
f
, then y(t
f
) = ¯y, STOP end if
10: t = t + h
11: y = ¯y
12: if t +
¯
h > t
f
, then
¯
h = t
f
− t end if
13: else
14: h =
¯
h
15: end if
16: else
17: h = h/2
18: end if
19: if h < h
min
, then STOP end if
20: end for
21: STOP, too many iterations
230 5 Numerical Solution of ODEs and DAEs
5.3 Numerical Solution of DAEs
We now consider the extension of the methods described above to systems of
differential-algebraic equations (DAEs) of the form
Φ(y, ˙y, t) = 0, (5.32)
where t is the time, y(t) ∈ R
n
is the state vector, and ˙y = dy/dt is the state
derivative. It is assumed that Φ(y, ˙y, t) ∈ R
n
is continuously differentiable
with respect to all of its arguments. The system (5.32) is sometimes called
implicit differential equations (IDEs).
We note that the equation (5.32) includes ordinary differential equations
(5.1), since we can write
Φ(y, ˙y, t) = ˙y − f(y, t) = 0.
The description (5.32) also includes the Lagrangian DAEs (4.8). To show
this we simply take y = [q
T
, f
T
, s
T
, e
T
, λ
T
, µ
T
]
T
. Thus, (5.32) can include a
combination of differential equations and algebraic equations.
An important structural property of the system (5.32) is the differentiation
index. To define this quantity consider the system of equations
Φ(y, ˙y, t) = 0
d
dt
Φ(y, ˙y, t) = 0
d
2
dt
2
Φ(y, ˙y, t) = 0
.
.
.
d
p
dt
p
Φ(y, ˙y, t) = 0. (5.33)
Then the differentiation index is the smallest integer p ≥ 0 for which the
system (5.33) can be used to determine an explicit system of ordinary differ-
ential equations of the form ˙y =
¯
f(y, t). In the following example we consider
the differentiation index for some typical dynamic systems described using
the Lagrangian DAEs.
Example 5.4.
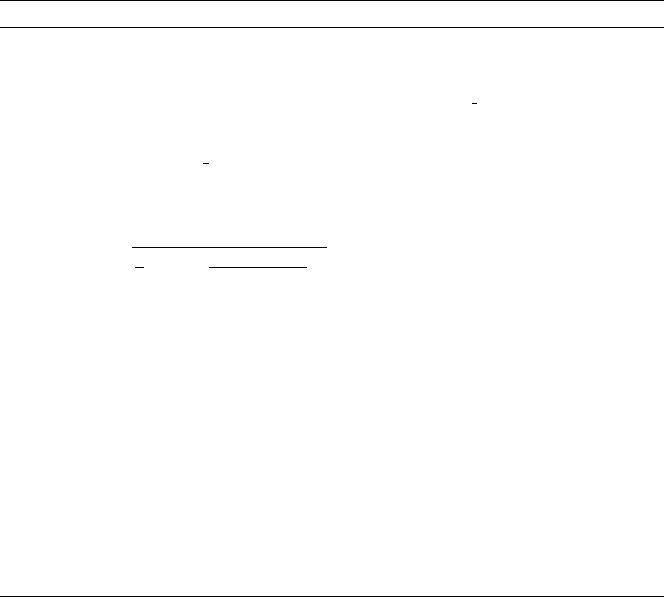
(i) Consider the mass-spring-damper system shown here.

5.3 Numerical Solution of DAEs 231
1
b
k
m
y
F
Using y
1
as the generalized displacement, and y
2
as the generalized flow
(velocity), the differential equations of motion for this system can be writ-
ten as the implicit differential equations
Φ
1
= ˙y
1
− y
2
= 0
Φ
2
= ˙y
2
− (k/m)y
1
− (b/m)y
2
− F/m = 0.
Therefore, Φ(y, ˙y, t) = [Φ
1
, Φ
2
]
T
, where y = [y
1
, y
2
]
T
. We can see that
˙y = [ ˙y
1
, ˙y
2
]
T
can be determined explicitly from the equations above. Hence,
no derivatives of Φ are required, and system has differentiation index p = 0.
In fact it is easy to see that a system of ordinary differential equations has
differentiation index 0.
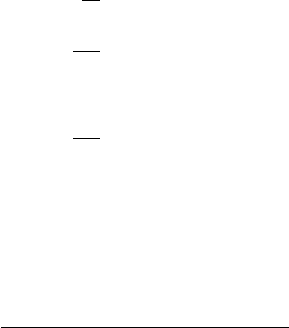
(ii)Consider the dynamic system described by a damper and an applied force,
as shown below.
b
1
F
y
Using y
1
as the generalized displacement, and y
2
as the generalized flow,
the differential equations of motion for this system can be written as the
implicit differential equations
Φ
1
= ˙y
1
− y
2
= 0,
Φ
2
= by
2
+ F = 0.
We note that ˙y
2
does not appear explicitly in this system of equations.
Taking one time derivative of the system however, gives the equation
b ˙y
2
+
˙
F = 0,
which can be used to determine ˙y
2
. Hence, this system has differentiation
index 1.
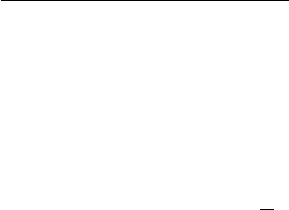
(iii)Consider the dynamic system described by a spring and an applied force,
as shown below.
F
1
k
y
Using y
1
as the generalized displacement, and y
2
as the generalized flow,
the differential equations of motion for this system can be written as the
implicit differential equations

232 5 Numerical Solution of ODEs and DAEs
Φ
1
= ˙y
1
− y
2
= 0,
Φ
2
= ky
1
+ F = 0.
We note that ˙y
2
does not appear explicitly in this system of equations.
Taking two time derivatives of the system however, gives the equation
k ˙y
2
+
¨
F = 0,
which can be used to determine ˙y
2
. Hence, this system has differentiation
index 2.
(iv)Consider the simple pendulum shown below. In this model we will use y
1
and y
2
as the displacements, and y
3
= ˙y
1
, and y
4
= ˙y
2
as the corresponding
flows.
y
m
l
g
1
2
y
The Lagrangian DAEs for this system can be written as
Φ
1
= ˙y
1
− y
3
= 0,
Φ
2
= ˙y
2
− y
4
= 0,
Φ
3
= m ˙y
3
+ 2y
1
y
5
= 0,
Φ
4
= m ˙y
4
+ 2y
2
y
5
− mg = 0,
Φ
5
= y
2
1
+ y
2
2
− l
2
= 0,
where y
5
is the Lagrange multiplier associated with the displacement con-
straint y
2
1
+ y
2
2
− l
2
= 0.
In these differential-algebraic equations ˙y
5
does not appear explicitly. How-
ever, three time derivatives of the equation Φ
5
= 0 produces
˙y
5
=
m
2l
2
(2y
3
˙y
3
+ 2y
4
˙y
4
− ˙y
2
g).
Therefore, this system has differentiation index 3.
5.3.1 Hessenberg form for the DAE
In many cases it is possible to separate the variables in y so that we can write
(5.32) explicitly as coupled differential equations and algebraic equations. For

5.3 Numerical Solution of DAEs 233
example, it can be seen the Lagrangian DAEs have such a structure. Some
important structural arrangements of the DAEs are known as the Hessenberg
forms, which are defined below. For the sake of simplicity we give the au-
tonomous form of these systems. The non-autonomous form can be deduced
by appending the differential equation ˙τ = 1, where τ represents the time
variable.
• Hessenberg Index-1 Form.
The DAEs are said to be in Hessenberg index-1 form if they can be written
as
˙x = f(x, z),
0 = g(x, z), (5.34)
where x(t) ∈ R
n
x
, z(t) ∈ R
n
z
, and the Jacobian, g
z
= ∂g/∂z, is nonsin-
gular along the solution to the DAEs. In this formulation x is called the
differential variable and z is called the algebraic variable.
These index-1 DAEs can be reduced to a system of ordinary differential
equations by taking one time derivative of the algebraic equation g(x, z) =
0. In fact,
d
dt
g(x, z) = g
x
˙x + g
z
˙z = 0, where g
x
= ∂g/∂x. Since g
z
is
nonsingular we have ˙z = −g
−1
z
g
x
˙x = −g
−1
z
g
x
f. Hence, only one time
derivative of the algebraic equation is required to determine ˙z in terms of
x and z.
Clearly we can write (5.34) in the form of (5.32) by using y = [x
T
, z
T
]
T
.
Also note that the DAEs in Example 5.4-(ii) can be put in Hessenberg
index-1 form if we select x = y
1
and z = y
2
.
• Hessenberg Index-2 Form.
The DAEs are said to be in Hessenberg index-2 form if they can be written
as
˙x = f(x, z),
0 = g(x), (5.35)
where x(t) ∈ R
n
x
, z(t) ∈ R
n
z
, and the matrix g
x
f
z
is nonsingular along
the solution to the DAEs, where f
z
= ∂f/∂z.
Two time derivatives of the algebraic equation g(x) = 0 gives ˙z =
−(g
x
f
z
)
−1
(g
x
f)
x
f, where (g
x
f)
x
= ∂(g
x
f)/∂x. Note that we can write
(5.35) in the form of (5.32) by using y = [x
T
, z
T
]
T
, and the DAEs in Ex-
ample 5.4-(iii) can be put in Hessenberg index-2 form if we select x = y
1
and z = y
2
.
• Hessenberg Index-3 Form.
The DAEs are said to be in Hessenberg index-3 form if they can be written
as
˙x = f(x, z),
˙z = h(x, z, u),
234 5 Numerical Solution of ODEs and DAEs
0 = g(x), (5.36)
where x(t) ∈ R
n
x
, z(t) ∈ R
n
z
, u(t) ∈ R
n
u
and the matrix g
x
f
z
h
u
is
nonsingular along the solution to the DAEs, where h
u
= ∂h/∂u. Taking
three time derivatives of the algebraic equation g(x) will allow us to reduce
the DAEs to a system of ordinary differential equations (see Problem 15).
We can write (5.36) in the form of (5.32) by using y = [x
T
, z
T
, u
T
]
T
, and
the DAEs in Example 5.4-(iv) can be put in Hessenberg index-3 form if
we select x = [y
1
, y
2
]
T
, z = [y
3
, y
4
]
T
and u = y
5
.
5.3.2 Implicit Runge-Kutta methods for DAEs
Implicit Runge-Kutta methods can be applied directly to the differential
equations (5.32), and the Hessenberg form DAEs (5.34), (5.35) and (5.36).
In the case of the differential equations (5.32) the k-th step of an s-stage
implicit Runge-Kutta method has the form
y
(k+1)
= y
(k)
+ h
s
X
i=1
b
i
Y
0
i
,
0 = Φ(Y
i
, Y
0
i
, τ
i
), i = 1, 2, ···, s,
Y
i
= y
(k)
+ h
s
X
j=1
a
ij
Y
0
j
,
τ
i
= t
(k)
+ c
i
h, (5.37)
where Y
0
i
∈ R
n
is the stage derivative, and Y
i
∈ R
n
is the stage value.
Therefore, each step of the method requires that we solve the equations
Φ(Y
i
, Y
0
i
, τ
i
) = 0, i = 1, 2, ···, s, for Y
i
∈ R
n
and Y
0
i
∈ R
n
.
In the case of the Hessenberg index-1 DAE (5.34) the k-th step of an
s-stage implicit Runge-Kutta method can be written as
x
(k+1)
= x
(k)
+ h
s
X
i=1
b
i
X
0
i
,
z
(k+1)
= z
(k)
+ h
s
X
i=1
b
i
Z
0
i
,
X
0
i
= f (X
i
, Z
i
), i = 1, 2, ···, s,
0 = g(X
i
, Z
i
), i = 1, 2, ···, s,
X
i
= x
(k)
+ h
s
X
j=1
a
ij
X
0
j
,
5.3 Numerical Solution of DAEs 235
Z
i
= z
(k)
+ h
s
X
j=1
a
ij
Z
0
j
, (5.38)
where X
0
i
∈ R
n
x
and X
i
∈ R
n
x
are the stage derivative and stage value for
the x variables, respectively. Similarly, Z
0
i
∈ R
n
z
and Z
i
∈ R
n
z
are the stage
derivative and stage value for the z variables, respectively.
We can develop similar formulas for the Hessenberg index-2 form and the
Hessenberg index-3 form. (See Problem 16.)
Hairer, Lubich and Roche (1989), and Hairer and Wanner (1996) have
investigated the properties of implicit Runge-Kutta methods applied to DAEs
in the Hessenberg form. An important set of results they develop show the
relationship between the local error and the structure of the DAEs for a given
set of Runge-Kutta coefficients. Here, we summarize the results they obtain
for the local error behavior of the Radau IIA methods.
• Hessenberg Index-1 Form.
Suppose an s-stage Radau IIA Runge-Kutta method is applied to the
system (5.34) with consistent initial conditions (x
(0)
, z
(0)
), then the local
error in the x and z variables satisfy
x
(1)
− x(t
(1)
) = O(h
2s−1
),
z
(1)
− z(t
(1)
) = O(h
2s−1
),
where t
(1)
= t
(0)
+ h, and x(t
(1)
), z(t
(1)
) is the exact solution to the DAEs
at time t
(1)
. The initial conditions are consistent if g(x
(0)
, z
(0)
) = 0. It is
interesting to note that the local error is the same as that obtained when
the s-stage Radau IIA method is applied to ordinary differential equations.
• Hessenberg Index-2 Form.
Suppose an s-stage Radau IIA Runge-Kutta method is applied to the
system (5.35) with consistent initial conditions (x
(0)
, z
(0)
), then the local
error in the x and z variables satisfy
x
(1)
− x(t
(1)
) = O(h
2s−1
),
z
(1)
− z(t
(1)
) = O(h
s
),
where t
(1)
= t
(0)
+ h, and x(t
(1)
), z(t
(1)
) is the exact solution to the DAEs
at time t
(1)
. In this case the initial conditions are consistent if g(x
(0)
) =
0 and g
x
(x
(0)
)f(x
(0)
, z
(0)
) = 0. Note here the reduction in the order of
the local error of the algebraic variable, z, when compared to Hessenberg
index-1 systems.
• Hessenberg Index-3 Form.
Suppose an s-stage Radau IIA Runge-Kutta method is applied to the
system (5.36) with consistent initial conditions (x
(0)
, z
(0)
, u
(0)
), then the
local error in the x, z and u variables satisfy
x
(1)
− x(t
(1)
) = O(h
2s−2
),
236 5 Numerical Solution of ODEs and DAEs
z
(1)
− z(t
(1)
) = O(h
s
),
u
(1)
− u(t
(1)
) = O(h
s−1
),
where t
(1)
= t
(0)
+ h, and x(t
(1)
), z(t
(1)
), u(t
(1)
) is the exact solution to
the DAEs at time t
(1)
. In this case the initial conditions are consistent
if g = 0, g
x
f = 0 and (g
x
f)
x
f + g
x
f
x
f + g
x
f
z
h = 0, when evaluated at
the initial condition x
(0)
, z
(0)
, u
(0)
. Again we note that the order of the
local error, for the algebraic variables, is significantly reduced here, when
compared to the order attained for index-1 systems.
5.3.3 Index reduction
From the results in the previous section we observe that, for the algebraic
variables (z and u), the order of the local error decreases as the differentia-
tion index increases. Therefore, we can assert that the computational expense
for solving differential-algebraic equations increases with increasing differen-
tiation index. That is, the higher the differentiation index, the greater the
computational effort required to achieve a desired solution accuracy for the
algebraic variables since, smaller step sizes will be required.
Due to this order reduction in the local error it is desirable to reformulate
a system of differential-algebraic equations with high differentiation index
into a problem with lower differentiation index. One approach to reducing
the differentiation index of DAEs in Hessenberg form is to differentiate the
algebraic equations. Each such differentiation will reduce the index of the
original problem by one, as illustrated in the following example.
Example 5.5.
Consider the index-3 DAEs
˙x = f(x, z),
˙z = h(x, z, u),
0 = g(x).
If we replace the algebraic equation g(x) = 0 with
d
dt
g(x) = 0 we obtain the
system
˙x = f(x, z),
˙z = h(x, z, u),
0 = g
x
(x)f(x, z),
which are index-2 DAEs.

5.3 Numerical Solution of DAEs 237
If we replace the equation g(x) = 0 with
d
2
dt
2
g(x) = 0, in the original index-3
DAEs, we obtain the system
˙x = f(x, z),
˙z = h(x, z, u),
0 = (g
x
(x)f(x, z))
x
f(x, z)
+ g
x
(x)f
x
(x, z)f(x, z)
+ g
x
(x)f
z
(x, z)h(x, z, u),
which are index-1 DAEs.
A third time derivative of the algebraic equation g(x) = 0 will lead to system
of first-order differential equations in x, z and u.
Unfortunately, the index reduction technique described in Example 5.5
does not always lead to satisfactory numerical results. The main reason for the
poor performance of these reduced index DAEs is that they do not explicitly
satisfy the constraint g(x) = 0. As a result, the numerical solution tends to
drift away from this constraint as the time variable increases (see Problem
9).
Nevertheless, there is an index reduction technique for index-3 DAEs that
works well in practice. This method can be described as follows.
Consider the index-3 LDAEs
˙q − f = 0,
M(q, f)
˙
f + φ
q
(q)
T
λ + Υ (q, f) = 0,
φ(q) = 0. (5.39)
We assume that the displacement constraints are linearly independent, and
the inertia matrix, M, is nonsingular at all times. Taking two time derivatives
of the displacement constraint φ = 0 we can reduce this LDAEs to a system
of ordinary differential equations
˙x = F (x),
where x = [q
T
, f
T
]
T
and
F (x) =
"
f
−M
−1
φ
q
(q)
T
φ
q
M
−1
φ
T
q
−1
h
(φ
q
f)
q
f −φ
q
M
−1
Υ
i
− M
−1
Υ
#
.
To ensure that the solution to this ODEs does not drift from the constraints
φ = 0 and
˙
φ = φ
q
f = 0 we solve the system
˙x = F (x),
0 = H(x), (5.40)