Dunajski M. Solitons, Instantons, and Twistors
Подождите немного. Документ загружается.

86 5: Lagrangian formalism and field theory
The variation δq is defined, for each fixed t,by
δq =
d
ds
q
s
|
s=0
.
The particle will follow a trajectory for which the action is stationary, that is,
δS =0.
Integration by parts shows that this condition leads to the Euler–Lagrange
equations: The variation of the action
δS =
d
ds
S|
s=0
=
t
2
t
1
∂ L
∂q
i
δq
i
+
∂ L
∂
˙
q
i
δ
˙
q
i
dt
vanishes if the Euler–Lagrange equations
d
dt
∂ L
∂
˙
q
i
−
∂ L
∂q
i
= 0 (5.1.3)
hold, as δq
i
vanishes on the boundary of [t
1
, t
2
].
The Euler–Lagrange equations are usually non-linear and exact solutions
are difficult (or impossible) to obtain. In some cases linearization leads to
satisfactory approximate solutions. To find these one chooses an equilibrium
position, that is, a point q
0
∈ X such that
∂U
∂q
|
q=q
0
=0,
and expands U around this equilibrium neglecting terms of order higher
than 2
U = const +
1
2
b
ij
q
i
q
j
, where b
ij
=
∂
2
U
∂q
i
∂q
j
|
q=q
0
.
The symmetric quadratic form b can be diagonalized, and the system under-
goes small oscillations with frequencies given by the eigenvalues of b.
Most problems treated in this book owe their interesting physical and
mathematical properties to the non-linearity of the underlying equations, and
resorting to the method of small oscillation is not appropriate. There is a less
well-known alternative: Consider a particle in R
n+1
with the Lagrangian (5.1.2)
where U : R
n+1
→ R is a potential whose minimum value is 0. The equilibrium
positions are on a subspace X ⊂ R
n+1
given by U = 0. If the kinetic energy of
the particle is small, and the initial velocity is tangent to X, the exact motion
will be approximated by a motion on X with the Lagrangian L
given by a
restriction of L to X
L
=
1
2
h
rs
˙γ
r
˙γ
s
, r, s =1,...,dim X. (5.1.4)
5.1 A variational principle 87
Here, the γ ’s are local coordinates on X, and the metric h = h
rs
(γ )dγ
r
dγ
s
is
induced on X from the Euclidean inner product on R
n+1
. The Euler–Lagrange
equations for (5.1.4) are
¨γ
r
+
r
su
˙γ
s
˙γ
u
=0, (5.1.5)
where the functions
r
su
=
r
su
(γ ) are the Chrisoffel symbols of the Levi-Civita
connection of h (given by (9.2.5)). If, for example, U =(1−r
2
)
2
, where r = |q|,
then the motion with small energy is approximated by the motion on the unit
sphere in R
n+1
where trajectories are great circles, that is, a circular motion at
r = 1 with constant speed. The true motion will have small oscillations in the
direction transverse to X, with the approximation becoming exact at the limit
of zero initial velocity [142].
In Arnold’s treatment [5] of constrained mechanical systems the constraints
are replaced by a potential which becomes large away from the surface of
constraints. The method leading to (5.1.4) does the converse: A slow motion
in a potential becomes a free motion on the manifold of constraints.
5.1.1 Legendre transform
Given a configuration space X, and a Lagrangian L : TX−→ R, define n
functions, called conjugate momenta, by
p
i
=
∂ L
∂
˙
q
i
.
We will assume that (q, p) can be used as coordinates in place of (q,
˙
q). The
Hamiltonian H = H(p, q, t) is then defined by the Legendre transform
H(q, p, t)=p
i
˙
q
i
− L(q,
˙
q, t) (5.1.6)
where in the above formula
˙
q must be expressed in terms of ( p, q), and we
assume that the Lagrangian can explicitly depend on t. Comparing the two
differentials
dH =
∂ H
∂p
i
dp
i
+
∂ H
∂q
i
dq
i
+
∂ H
∂t
dt = d
%
p
i
˙
q
i
− L(q,
˙
q, t)
&
=
˙
q
i
dp
i
−
∂ L
∂q
i
dq
i
−
∂ L
∂t
dt
leads to
∂ H
∂t
= −
∂ L
∂t
, (5.1.7)
and the Hamilton canonical equations (1.1.2) where in this chapter we use
upper indices and lower indices for position and momenta, respectively.
88 5: Lagrangian formalism and field theory
The reader will have noticed that we have abused the notation. In general
∂(H + L)/∂t = 0 despite that (5.1.7) suggests otherwise. The apparent paradox
(which Nick Woodhouse calls the second fundamental confusion of calculus
[187]) serves as a warning. The meaning of ∂/∂t in (5.1.7) depends on what
variables we hold fixed. These variables are different in the Lagrangian and
Hamiltonian formulations, although the time coordinate t is unchanged by the
Legendre transform.
5.1.2 Symplectic structures
In Section 1.3 we considered Poisson structures as a general arena for the
Hamiltonian formalism. Here we shall concentrate on symplectic structures
which arise as special cases of Poisson structures.
A symplectic manifold is a smooth manifold M of dimension 2n with a
closed two-form ω ∈
2
(M) which is non-degenerate at each point, that is,
ω
n
= 0. The symplectic two-form restricted to a point in M gives an isomor-
phism between the tangent and cotangent spaces given by
V −→ V
ω,
where V is a vector field, and
denotes a contraction of a differential form
with a vector field. Using index notation (V
ω)
b
= V
a
ω
ab
. In particular a
function f on M gives rise to a Hamiltonian vector field X
f
given by
X
f
ω = −df. (5.1.8)
The Poisson bracket (1.3.8) of two functions f, g can be defined as
{ f, g} = X
g
( f )=ω(X
g
, X
f
)=−{g, f },
where ω(X
g
, X
f
)=X
f
(X
g
ω). It automatically satisfies the Jacobi
identity as
0=dω(X
f
, X
g
, X
k
)={ f, {g, k}} + {g, {k, f }} + {k, {f, g}}.
It also satisfies
[X
f
, X
g
]=−X
{ f,g}
,
which follows from calculating the RHS on an arbitrary function and using
the Jacobi identity.
Hamiltonian vector fields preserve the symplectic form as
Lie
X
f
(ω)=d(X
f
ω)+X
f
dω = −ddf =0,
where Lie is the Lie derivative (A3) defined in the Appendix A. Conversely if
a vector field Lie derives ω then it is always Hamiltonian provided that M is

5.1 A variational principle 89
simply connected. The one-parameter group of transformations generated by
a Hamiltonian vector field is called a symplectomorphism.
The Darboux theorem stated in Section 1.3 implies that symplectic mani-
folds are locally isomorphic to R
2n
with its canonical symplectic structure
ω =
n
i=1
dp
i
∧ dq
i
. (5.1.9)
The formula (5.1.9) is also valid if M = T
∗
X and p
j
are local coordinates on
the fibres of the cotangent bundle.
If ω is given in the Darboux atlas, then the Poisson bracket is given by
(1.1.1), and the Hamiltonian vector field corresponding to the function H is
X
H
=
n
i=1
∂ H
∂p
i
∂
∂q
i
−
∂ H
∂q
i
∂
∂p
i
.
In general
X
H
=
2n
a,b=1
ω
ab
∂ H
∂ξ
b
∂
∂ξ
a
where ξ
a
, a =1,...,2n, are local coordinates on M.
5.1.3 Solution space
Let M be a solution space of a second-order Euler–Lagrange equations (5.1.3).
We shall assume that no boundary conditions are imposed on the variation δq,
and derive the symplectic structure on M from the boundary term in (5.1.3).
Let
S
12
=
t
2
t
1
L(q(t),
·
q(t))dt
be a function on M. Consider a one-parameter family of paths q
s
(t). Then
dS
12
ds
|
s=0
=
∂ L
∂
·
q
δq|
t
2
t
1
because equations (5.1.3) are satisfied. Rewrite the last formula as
dS
12
= P
t
2
− P
t
1
where
P
t
= p
i
dq
i
|
t
is the canonical one-form on T
∗
X. The identity ddS
12
= 0 implies that
ω = dP
t
1
= dP
t
2
(5.1.10)
90 5: Lagrangian formalism and field theory
is a two-form on M = T
∗
X which does not depend on the choice of points
t
1
, t
2
.
5.2 Field theory
Let R
1,D
denote a (D + 1)-dimensional Minkowski space-time with coordinates
x
µ
=(x
0
, x
1
,...,x
D
)=(t, x),
and the flat metric of signature (+ −−···−)
ds
2
= η
µν
dx
µ
dx
ν
= dt
2
−|dx|
2
.
This metric will be used to raise and lower indices. We shall discuss a relativis-
tic field theory of N scalar fields. Let φ : R
D+1
→ Y ⊂ R
N
be a scalar field with
components φ
a
, a =1,...,N,onR
1,D
.
We assume that the Lagrangian density L = L(φ
a
,∂
µ
φ
a
), where ∂
µ
= ∂/∂
µ
depends only on fields and their first derivatives. The action is given by
S =
R
D
×R
L d
D
xdt. (5.2.11)
The field equations are derived from the least-action principle
∂L
∂φ
a
−
∂
∂x
µ
∂L
∂(∂
µ
φ
a
)
=0.
The natural Lorentz-invariant Lagrangian density
L =
1
2
∂
µ
φ
a
∂
µ
φ
a
− U(φ). (5.2.12)
leads to the second-order field equations
∂
µ
∂
µ
φ
a
= −
∂U
∂φ
a
. (5.2.13)
Suppose that a Lie group G acts on the spaces of dependent and independent
variables in the way described in Chapter 4. Suppose that the infinitesimal
group action changes the Lagrangian by a total divergence
L −→ L + ε∂
µ
B
µ
for some B
µ
(x) (this condition must hold before the field equations are
imposed). If G acts only on the target space Y we talk about internal sym-
metries. In a neighbourhood of the identity transformation we have
φ
a
(x) −→ φ
a
(x)+εW
a
(x).
5.2 Field theory 91
We calculate the corresponding infinitesimal change in the Lagrangian
density
L −→ L + ε
∂L
∂(∂
µ
φ
a
)
∂
µ
(W
a
)+
∂L
∂φ
a
W
a
= L + ε∂
µ
∂L
∂(∂
µ
φ
a
)
W
a
+ ε
∂L
∂φ
a
− ∂
µ
∂L
∂(∂
µ
φ
a
)
W
a
.
We now use the Euler–Lagrange equations to set the last term to zero. There-
fore
J
µ
=
∂L
∂(∂
µ
φ
a
)
W
a
− B
µ
=(J
0
, J)
is the conserved current. The divergence free condition
∂ J
0
∂t
+ ∇·J =0
implies the conservation of the Noether charge
Q =
R
D
J
0
d
D
x.
An application of the divergence theorem shows that this charge is independent
of time if J vanishes at spatial infinity
dQ
dt
=
R
D
∂ J
0
∂t
d
D
x = −
R
D
∇·Jd
D
x =0.
If the action of G on Y is trivial, and G acts on R
D+1
isometrically we talk
about space-time symmetries. The Lagrangian (5.2.12) is invariant under the
transformation
x
µ
−→ x
µ
+ εV
µ
(x
ν
).
Infinitesimally the field and the Lagrangian density transform by the Lie deriva-
tive along the vector V = V
µ
∂
µ
φ
a
−→ φ
a
(x
µ
+ εV
µ
)=φ
a
+ εLie
V
φ
a
and L −→ L + εLie
V
L.
Assume that V
µ
is a constant vector, so that G is the group of space-time trans-
lations. The conserved current is in this case given by the energy–momentum
tensor
T
µ
ν
=
∂L
∂(∂
µ
φ
a
)
∂
ν
φ
a
− η
µ
ν
L.
92 5: Lagrangian formalism and field theory
This tensor is divergence free, ∂
µ
T
µ
ν
= 0, and the associated conserved charges
are the energy E and momentum P
i
:
E =
R
D
T
0
0
d
D
x and P
i
= −
R
D
T
0
i
d
D
x, i =1,...,D.
The conservation of E and P
i
is therefore related, by Noether’s theorem, to
the invariance of L under the time and spatial translations, respectively. In the
special case, when L is given by (5.2.12) we can define the kinetic and the
potential energy by
T =
1
2
R
D
φ
a
t
φ
a
t
d
D
x and V =
R
D
1
2
∇φ
a
·∇φ
a
+ U(φ)
d
D
x (5.2.14)
so that E = T + V.
5.2.1 Solution space and the geodesic approximation
A solution space S of the Euler–Lagrange equations (5.2.13) is an infinite-
dimensional manifold, and formally we can equip it with a symplectic struc-
ture, which arises from the boundary term in the variational principle. Let φ
be a solution to (5.2.13). A tangent vector δφ to S at a given solution φ is the
linearization of (5.2.13) around φ
∂
µ
∂
µ
δφ
a
= −
∂
2
U
∂φ
a
∂φ
b
|
φ=φ
0
δφ
b
. (5.2.15)
Analysing the variation of the action along the lines leading to (5.1.10) we find
a closed two-form on S
(δ
1
φ,δ
2
φ)=
R
D
δ
1
φ
a
∂
∂t
(δ
2
φ
a
) − δ
2
φ
a
∂
∂t
(δ
1
φ
a
)
d
D
x,
where δ
1
φ and δ
2
φ are two solutions to (5.2.15) which implies that integrand
does not depend on t.
The dynamics of finite-energy solutions to (5.2.13) with small initial velocity
can be reduced to a finite-dimensional dynamical system. The idea goes back to
Manton [113], and the method is analogous to the argument leading to (5.1.4)
with R
n+1
replaced by an infinite-dimensional configuration space of the fields
φ, and X replaced by the the moduli space M of static finite-energy solutions
to (5.2.13).
Assume that all finite energy static solutions φ
S
= φ
S
(x,γ) to (5.2.13) are
parameterized by points in some finite-dimensional manifold M with local
coordinates γ . These solution give the absolute minimum of the potential
energy. The time-dependent solutions to (5.2.13) with small total energy (hence
small potential energy) above the absolute minimum will be approximated by

5.3 Scalar kinks 93
a sequence of static states, that is, a free motion in M. This free motion is
geodesic with respect to a natural Riemannian metric on M
h
rs
(γ )=
R
D
∂φ
a
S
∂γ
r
∂φ
a
S
∂γ
s
d
D
x (5.2.16)
which arises from the kinetic energy (5.2.14) by
T =
1
2
R
D
∂φ
a
S
∂t
∂φ
a
S
∂t
d
D
x =
1
2
R
D
∂φ
a
S
∂γ
r
∂φ
a
S
∂γ
s
·
γ
r
·
γ
s
d
D
x
=
1
2
h
rs
(γ )
·
γ
r
·
γ
s
.
5.3 Scalar kinks
In this section we shall study solitons in the context of Lagrangian field theory.
The term ‘soliton’ here has a different meaning to that which we used in the
first three chapters. The solitons are necessarily static and the inverse scattering
theory is not used in general.
Definition 5.3.1 Solitons are non-singular, static, finite energy solutions of the
classical field equations.
At the quantum level solitons correspond to localized extended objects (par-
ticles): Kinks in one-dimension, Vortices or Lumps in two dimensions, and
Monopoles in three dimensions. One finds solitons by solving classical non-
linear equations exactly. Sometimes time-dependent solitons are considered
and it is required that they are non-dispersive and preserve their shape after
collisions. These are ‘rare’ in the sense that they only appear in integrable field
theories which we studied in Chapter 2.
Consider a single scalar field on two-dimensional space time. The
Lagrangian density (5.2.12) with D = 1 gives
L =
R
1
2
φ
2
t
−
1
2
φ
2
x
− U(φ)
dx = T − V,
where φ
t
= ∂
t
φ,φ
x
= ∂
x
φ and
T =
R
1
2
φ
2
t
dx, V =
R
1
2
φ
2
x
+ U(φ)
dx
are the kinetic and the potential energies, respectively. The field equations
(5.2.13) are
φ
tt
− φ
xx
= −
dU
dφ
. (5.3.17)

94 5: Lagrangian formalism and field theory
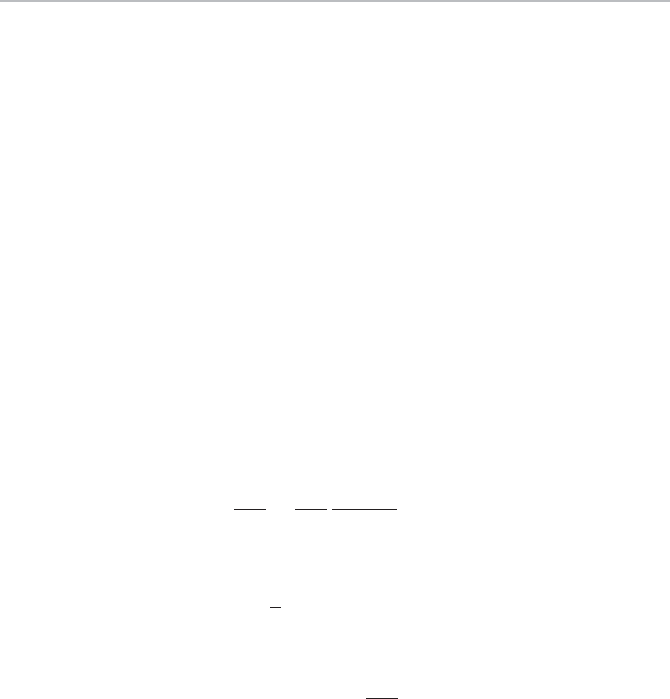
U(F)
F
F
2
F
1
Figure 5.1 Multiple vacuum
We need U(φ) ≥ U
0
for a stable vacuum, and we choose the normalization
U
0
= 0. Assume that the set U
−1
(0) = {φ
1
,φ
2
, ...} is non-empty and discrete
(Figure 5.1). In perturbation theory φ undergoes small oscillations around one
of the minima, φ = φ
1
+ δφ. The basic perturbative excitation is a scalar boson
with a squared mass equal to the quadratic part of U when expanded about
a minimum. This is because (5.2.12) is the Lagrangian density for the Klein–
Gordon equation ( + m
2
)δφ =0.
The finite-energy solutions must asymptotically approach an element of
U
−1
(0). This element can however be different at different ends of a real line.
The simplest topological solitons are characterized by the boundary conditions
φ
∼
=
φ
1
as x →−∞ and φ
∼
=
φ
2
as x →∞,
and cannot be treated within the perturbation theory. These are the Kink
solutions connecting neighbouring vacua. The static field equation
φ
xx
=
dU
dφ
formally resembles the Newton equations in classical mechanics. It inte-
grates to
1
2
φ
2
x
= U(φ)+c, c = const.
The boundary conditions yield U(φ
1
)=U(φ
2
) = 0, and therefore c = 0. The
kink solution is implicitly given by
x − x
0
= ±
φ
1
2U(
˜
φ)
d
˜
φ. (5.3.18)
The RHS diverges near a minimum of U. Here the constant x
0
is the location
of the kink and the sign on the RHS corresponds to the direction of the kink.
5.3 Scalar kinks 95
The potential energy of the kink is
E =
1
2
φ
2
x
+ U
dx =
2Udx.
r
Example. Let U = λ
2
(φ
2
− a
2
)
2
/2. In perturbation theory this describes a
scalar boson with mass 2λa, because
U(φ)=
1
2
λ
2
(φ + a)
2
(φ − a)
2
=
1
2
(2λa)
2
(φ − a)
2
+ O
%
(φ − a)
3
&
and we regard a and φ as dimensionless. The integration (5.3.18) gives
x − x
0
= ±
1
λ
φ
0
d
˜
φ
a
2
−
˜
φ
2
= ±
1
λa
tanh
−1
(φ/a).
Therefore
φ
K
(x)=±a tanh[λa(x − x
0
)] (5.3.19)
which approaches ±a as x →±∞. This is a truly non-perturbative solution
as for the fixed boson mass m =2λa the RHS of (5.3.19) is not analytic in
λ, and therefore it can not be obtained by starting from a solution to the
(1 + 1)-dimensional wave equation for φ and expanding in λ.
The energy of the kink is given by
E = λ
2
a
4
R
sech
4
[λa(x − x
0
)]dx =
4
3
λa
3
.
We identify E with the mass of the kink. This is because the solution has non-
zero energy density in a small region of order a
−1
. The energy density has its
maximum at x = x
0
which justifies the interpretation of x
0
as the position of
the kink.
The mass of the kink is therefore much larger than the boson mass if a
2
is
large with λa fixed, which is the perturbative regime of quantized theory. In
quantum theory the field fluctuations around the kink can contribute to the
kink mass. The higher order corrections are calculated in [141].
A moving kink can be obtained by a Lorentz boost of a static kink:
φ(x, t)=φ
K
[γ (x − vt)],γ=(1− v
2
)
−1/2
.
It solves the field equation (5.3.17). The moving kink has conserved energy
E = T + V related to its mass by E = γ M. It also has a conserved momentum
P = −
∞
−∞
φ
t
φ
x
dx = γ Mv.