Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

SECTION 2.13 PROGRAMMING EXAMPLES AND EXERCISES 57
The vector type
Because we experienced compilation problems w ith versions of GCC lower than 3.0,
we had to explicitly qualify the
vector type in all examples. For instance, we write
e3ga::vector instead of just vector when we are in the e3ga model. This prevents old
GCC versions from confusing
e3ga::vector with std::vector,whichisanarraytype
provided by the C++ standard template library.
2.13.1 DRAWING BIVECTORS
In this first example, we draw a grid of 2-D bivectors. The code is shown in Figure 2.9 and
the output is shown in Figure 2.10. We take two vectors
v1 and v2.Vectorv1 is fixed to
e
1
, and v2 is rotated 360 degrees in 24 steps of 15 degrees.
The vectors are rendered by the default multivector drawing function
draw().Weprovide
two ways to draw the bivectors: as a parallelogram or as a disc. The discs are rendered by
draw(), but the parallelog rams we render ourselves. To switch between the two bivector
drawing modes, click anywhere and select the mode from the popup menu.
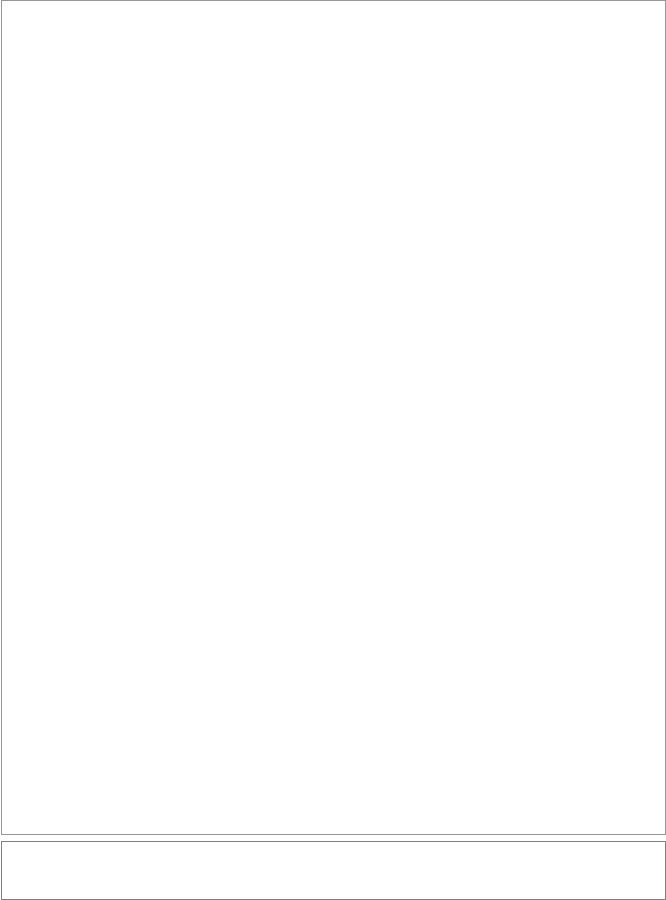
2.13.2 EXERCISE: HIDDEN SURFACE REMOVAL
In computer graphics, 3-D models are often built from convex polygons. Each polygon
is defined by an ordered list of vertices. Most of the time, triangles (3 vertices) or quads
(4 vertices) are used. When a solid model is rendered opaque, polygons that face away
from the camera are invisible. Because these back-facing polygons are invisible, no time
needs to be spent on rasterizing them if they can be singled out early on.
Back-facing polygons can be identified by computing the orientation of the projected
(2-D) vertices of the polygon. The convention is that 3-D models are constructed such that
the vertices of a polygon have a counterclockwise order when observed from the outside
of the model (see Figure 2.11). Back-facing polygons have a clockwise vertex order.
In the example, the surface is triangulated, so we need to find a way to determine the
relative orientation of a triangle formed by the endpoints of three vectors a, b, c in
2-D. It is not a ∧ b ∧ c, for that would be zero. Instead, we should consider one of the
vertices a as an anchor, and use the bivector spanned by the difference vectors (b −a) and
(c −a) relative to the standard bivector e
1
∧e
2
. After this hint, implementation should be
straightforward.
We have provided the code that renders a 3-D model from 2-D vertices (Figure 2.13).
As you can see on the left in Figure 2.12, the code renders the model without back-
face culling. T he model is rendered as a wireframe so that you can see the back-facing
polygons. The right side of Figure 2.12 is the result you should get when you have
correctly implemented back-face culling.
58 SPANNING ORIENTED SUBSPACES CHAPTER 2
e3ga::vector v1, v2, v1_plus_v2;
bivector B;
float step=2*M_PI / (nbBivectorX * nbBivectorY);
for (float a=0;a<2*M_PI; a += step) {
// vector 1 is fixed to e1
v1 = e1;
// compute vector 2:
v2 = cos(a) * e1 + sin(a) * e2;
// compute the bivector:
B=v1^v2;
// draw vector 1 (red), vector 2 (green)
glColor3f(1.0f, 0.0f, 0.0f);
draw(v1);
glColor3f(0.0f, 1.0f, 0.0f);
draw(v2);
// draw outer product v1^v2:
glColor3f(0.0f, 0.0f, 1.0f);
if (!g_drawParallelogram) {
draw(B);
}
else {
v1_plus_v2 = v1 + v2;
// draw QUAD with vertices
// origin — > v1 — > (v1+v2) — > v2
glBegin(GL_QUADS);
glVertex2f(0.0f, 0.0f);
glVertex2f(v1.e1(), v1.e2());
glVertex2f(v1_plus_v2.e1(), v1_plus_v2.e2());
glVertex2f(v2.e1(), v2.e2());
glEnd();
}
// ...
}
Figure 2.9: Code for drawing bivectors.

SECTION 2.13 PROGRAMMING EXAMPLES AND EXERCISES 59
Figure 2.10: Drawing bivectors screenshot (Example 1).
a
b
c
Counterclockwise/
front-facing
Clockwise/
back-facing
a
b
c
Figure 2.11: The orientation of front- and back-facing polygons.
60 SPANNING ORIENTED SUBSPACES CHAPTER 2
Figure 2.12: On the left, a wireframe torus without back-face culling. On the right, the same
torus with back-face culling.
In the sample code, use the left mouse button to rotate the model. The middle and right
mouse buttons pop up a menu that allows you to select another model.
If you wonder where the 2-D projected vertices originally came from, we used the OpenGL
feedback mechanism to obtain the 2-D viewport coordinates of standard GLUT models.
These models can be rendered using a simple call to
glutSolid...().GLUTprovides
functions for rendering teapots, cubes, spheres, cones, tori, dodecahedrons, octahedrons,
tetrahedrons, and icosahedrons. See the
getGLUTmodel2D() function at the bottom of
the source file.
2.13.3 SINGULARITIES IN VECTOR FIELDS
As a more advanced application of the outer product, we will show how to use it to locate
singularities in a vector field. A vector field is defined by a function V that assigns a vector
to every point in space.
For this example, we will work in a 3-D space with a basis {e
1
, e
2
, e
3
}. So for every point
p in space characterized by a position vector p = x e
1
+ y e
2
+ z e
3
, the function V assigns
avectorV(p). A simple example of a vector field is the function
V(p) = x e
1
+ 2y e
2
+ 4z e
3
.
(2.15)
A singularity in a vector field occurs at any point at which V(p) = 0. In the vector field
in (2.15), there is a singularity at p = 0, since V(0) = 0. In vector field analysis, it is

SECTION 2.13 PROGRAMMING EXAMPLES AND EXERCISES 61
// render model
for (unsigned int i = 0; i < g_polygons2D.size(); i++) {
// get 2D vertices of the polygon:
const e3ga::vector &v1 = g_vertices2D[g_polygons2D[i][0]];
const e3ga::vector &v2 = g_vertices2D[g_polygons2D[i][1]];
const e3ga::vector &v3 = g_vertices2D[g_polygons2D[i][2]];
// Exercise:
// Insert code to remove back — facing polygons here.
// You can extract the e1^e2 coordinate of a bivector ’B’ using:
// float c = B.e1e2();
// ...
// draw polygon
glBegin(GL_POLYGON);
for (unsigned int j = 0; j < g_polygons2D[i].size(); j++)
glVertex2f(
g_vertices2D[g_polygons2D[i][j]].e1(),
g_vertices2D[g_polygons2D[i][j]].e2());
glEnd();
}
Figure 2.13: The code that renders a model from its 2-D vertices (Exercise 2).
important to find the locations of singularities. For arbitrary vector fields, that is much
more difficult than for the field above.
Consider what happens if we place a box around a singularity and do the following:
•
Evaluate the vector field V(p) at all the points p on the surface of this box;
•
Normalize each vector to v(p) = V(p) /V(p) (this requires a metric);
•
Place the tail of each vector at the origin.
We now find that the heads of these normalized vectors form a unit sphere at the origin,
since they p oint in all directions. On the other hand, if we place a box around a region of
space that does not contain a singularity and repeat the above process, then the tips of the
vectors only form part of a sphere. Further, almost all points on this partial sphere have
two vectors pointing to it.
While mathematically this process will either give us a sphere or a partial sphere, it requires
evaluating the vector field at all points on the surface of the box. In practice, we can only
sample the vector field at a small number of points and then test the sampled vectors to
see if we approximately have a covering of a sphere.
62 SPANNING ORIENTED SUBSPACES CHAPTER 2
This is where trivectors come in handy. To test if the sampled vector field approximately
yields a sphere, we first triangulate the sample points, and then for each triangle of sample
points p
1
p
2
p
3
,weformthetrivectorT
i
=
1
6
v(p
1
) ∧ v(p
2
) ∧ v(p
3
) of the normalized
vector fields evaluated at those locations. This trivector T
i
has the same volume as the
tetrahedron formed by the center of the sphere and the three normalized vectors. If we
sum the trivectors formed by the normalized vectors of all the triangles of the sample
points, the magnitude of the resulting trivector T will approximately be the volume of the
sphere if there is a singularity inside the cube that we sampled. If there is no singularit y
inside the sampling cube, then roughly speaking, each trivector appears twice in the sum,
but with opposite sign, and thus T will have a magnitude 0.
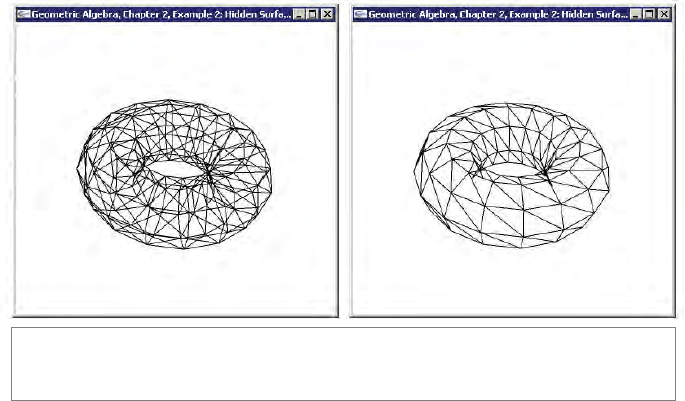
Figure 2.14 illustrates the process using a small number of points on the cube. Typically,
we normalize T by the volume of the unit sphere, so the magnitude of T should be close
to 1 if there is a singularity inside the cube, and close to 0 otherwise.
Figure 2.15 shows code to test for a singularity within a cube. We assume that the vector
field has been sampled on a regular grid on each face of the cube and that each vector
has been prenormalized. The
SumFace() procedure computes the sum of the trivectors
spanned by two tr iangles made up of the vertices of one square on the face of the cube.
The
TestSingularity() procedure calls the SumFace() procedure for each face of the
cube, and sums the value computed for each face. It then normalizes the result by the
volume of a unit sphere.
The algorithm can be improved and extended to find higher-order singularities and to
find curves and surfaces consisting of singularities. For more details, see [45]. A complex
example is shown in Figure 2.16, where the vector field is the gradient of the function
(x − cos (z))
2
+ ( y − sin(z))
2
.
(a) (b) (c)
Figure 2.14: Sampling V over a cube and summing the trivectors on the unit sphere.
SECTION 2.13 PROGRAMMING EXAMPLES AND EXERCISES 63
/*
Sum over face
The ’vf’ array contains the pre-normalized vector field for the face.
The face is evaluated in a grid-like fashion
at (’gridSize’+1) X (’gridSize’+1) locations.
The resulting (trivector) volume is returned.
*/
trivector sumFace(const vector *vf, int gridSize) {
trivector sum3d;
for (int i1 = 0; i1 < gridSize; i1++) {
for (int i2 = 0; i2 < gridSize; i2++) {
// cvf = ’current vector field’ and points into the vf array
cvf = vf + i1 * (gridSize + 1) + i2;
trivector a = _trivector(cvf[0] ^ cvf[gridSize + 2] ^ cvf[gridSize + 1]);
trivector b = _trivector(cvf[0] ^ cvf[1] ^ cvf[gridSize + 2]);
sum3d += a+b;
}
}
return sum3d/6.0f;
}
/*
Visits each of the 6 faces of the cube, computes the volume.
Returns true is a singularity is detected
*/
bool testSingularity(const vector *cube[6], int gridSize) {
// visit all 6 faces
for (int i=0;i<6;i++) {
sum3d += sumFace(cube[i], gridSize);
}
// normalize sum
sum3d /= 4.0f * 3.14159f / 3.0f;
// detect point singularity
return ((norm_e(sum3d) > 0.9) && (norm_e(sum3d) < 1.1));
}
Figure 2.15: Code to test for singularity (Example 3). The code was edited for readability. For the unedited source code,
see the GA sandbox source code package.
64 SPANNING ORIENTED SUBSPACES CHAPTER 2
Figure 2.16: A helix-shaped singularity, as detected by Example 3.
3
METRIC PRODUCTS
OF SUBSPACES
With the outer product of the previous chapter we can span subspaces. It also enables us
to compare lengths on a line, areas in the same plane, and volumes in the same space.
We clearly have a need to compare lengths on different lines and areas in different planes.
The nonmetrical outer product cannot do that, so in this chapter we extend our subspace
algebra with a real-valued scalar product to serve this (geo)metric need. It generalizes the
familiar dot product between vectors to act between blades of the same grade.
Then we carry the algebra further, and investigate how the scalar product and the outer
product interact. This automatically leads to an inner product between subspaces of dif-
ferent dimensionality that we call the contraction. The contraction of subspace A onto
subspace B computes the part of B least like A. That also gives us a dual way to characterize
subspaces, through blades denoting their orthogonal complement.
With these metric products, we can easily compute geometrically useful operations like
the orthogonal projection and determine reciprocal frames for nonorthonormal coordi-
nate systems. We can even use them to embed the 3-D cross product, although we provide
strong arguments for using geometric algebra constructs instead.
65

66 METRIC PRODUCTS OF SUBSPACES CHAPTER 3
3.1 SIZING UP SUBSPACES
3.1.1 METRICS, NORMS, AND ANGLES
To establish quantitative measures of subspaces, we need them to be defined in an
n-dimensional metric space
R
n
. Such a metric space is just a vector space with a way to
compute the norm of an arbitrary vector. That capability can be specified in several ways.
The mathematically preferred method is to use a bilinear form Q, which is a scalar-valued
function of vectors. That is equivalent to defining an inner product a ·b = Q[a,b] between
two arbitrary vectors a and b (also known as the dot product). Algebraically, it returns a
scalar from two vectors, so it is a mapping · :
R
n
×R
n
→ R, and it is linear and symmetric.
It defines a metric on the vector space
R
n
.
For most of this chapter, you can safely develop your intuition by thinking of a Euclidean
metric in which the dot product is positive definite (the latter meaning that a·a is only zero
when a is). Any positive definite metric can be rescaled to a Euclidean metric by choosing
one’s coordinate axes properly, so this appears quite general enough. These positive defi-
nite metrics are called nondegenerate. They may seem to be all you need to do Euclidean
geometry. But as we already indicated in Chapter 1, there are useful models of Euclidean
geometry that use vector spaces with non-Euclidean metrics in their representation of
elements in physical space. Such degenerate metrics are no longer positive definite, so that
for some vector a the inner product a · a can be negative. For some vectors, a ·a can even
be zero without a being zero; such a vector is called a null vector. More detail at this point
would distract from our main goal in this chapter, which is to extend the dot product
to blades, so we provide Appendix A as additional explanation. As a notation for these
metric spaces, we use
R
p,q
for a space with p positive dimensions and q negative dimen-
sions. A space
R
n,0
is then an n-dimensional metric space that is effectively a space with a
Euclidean metric. We write
R
n
if we are not specific on a metric. We will only start using
degenerate metrics in Chapter 13.
We commonly use the algebraically defined inner product to compute geometrically
useful properties. We compute the length (or norm) a ofavectora, through
a
2
= a · a,
and the cosine of the angle between vectors a and b through
cos =
a · b
ab
.
(3.1)
We clearly want such capabilities for general subspaces of the same grade: to be able
to assign an absolute measure to their weight (length, area, volume, etc.) and to com-
pare their relative attitudes by an angle measure. We provide for this geometric need
algebraically by introducing a real-valued scalar product between blades of the same
grade.