Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

SECTION 2.3 ORIENTED AREA ELEMENTS 27
a
a + b
b
O
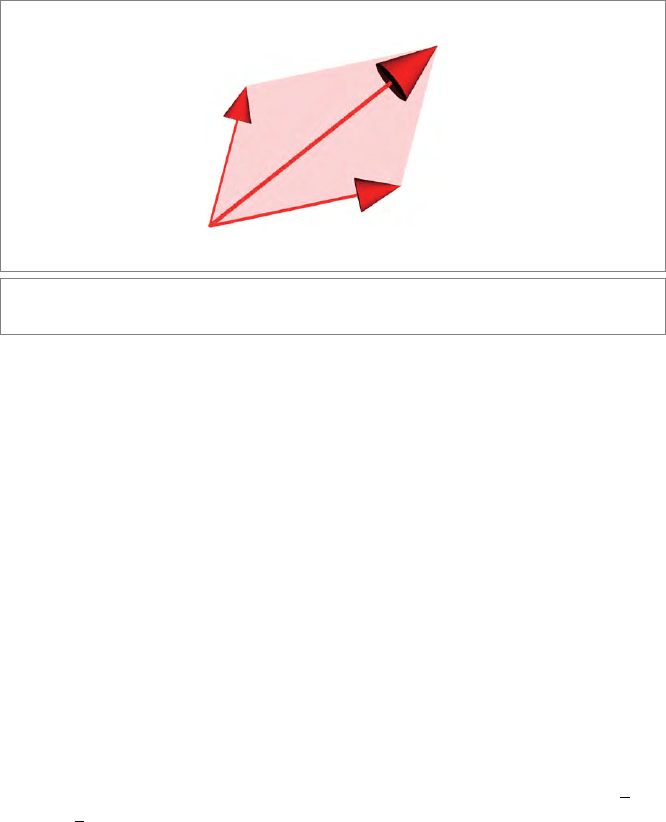
Figure 2.2: Imagining vector addition.
to generate the figures. But you should think and feel that vector addition is geometric: it
completes the parallelogram of a and b, and algebraically there is no need to go lower than
the notation a+ b, which has all the properties you need. After you have loaded Figure 2.2
in
GAViewer, you can drag a and b, and see the resulting change in a + b, in 3-D. That
conveys precisely this coordinate-free feeling. Playing with this and the other figures will
aid your intuition. It will help you dare to leave coordinates behind, and think about the
algebra at the proper level of geometric primitives.
2.3 ORIENTED AREA ELEMENTS
2.3.1 PROPERTIES OF PLANES
A plane through the origin is a 2-D homogeneous subspace of the vector space R
n
.Itmay
be determined by two linearly independent vectors, a and b, in the sense that any vector
x in the plane can be written as
x = λa + μb.
This specification is not unique. For instance, replacing a and b by (a + b)/
√
2 and
(a − b)/
√
2 gives the same set of vectors, as do many other linear combinations on a and
b. We should think about replacing the specification with something more appropriate,
which will make it easier to verify whether two specifications refer to the same plane.
Moreover, just like the homogeneous line, a homogeneous plane has more properties than
just being a set of vectors. We list those properties, illustrated in Figure 2.1(c):
•
A homogeneous plane has an att itude in the surrounding n-dimensional space
R
n
. This is its “subspace aspect” of being a par ticular planar carrier. In 3-D, this
is the property traditionally characterized by a normal vector for the plane, with

28 SPANNING ORIENTED SUBSPACES CHAPTER 2
any weight or orientation. But such a characterization by a vector is insufficient for
a planar subspace of an n-dimensional space. (Another defect is that it character-
izes the nonmetric concept of a particular 2-D subspace by a metric construction
involving perpendicularity.)
•
A plane may be considered to have an orientation, in the sense that the plane
determined by two vectors a and b would have the opposite orientation of a plane
determined by the vectors b and a. We use this often when we specify angles, speak-
ing of the angle from a to b as being of opposite sign to the angle from b to a.The
sign of the angle should be referred to more properly as relative to the orientation
of the plane in which its defining vectors reside.
•
A plane has a measure of area, which we shall call its weight. The plane determined by
the vectors 2a and b has twice the weight (or double the area measure) of the plane
determined by the vectors a and b. As with vectors, this weight is for now only a
relative measure within planes of the same attitude. (We would need a metric to
compare areas within different planes.)
In linear algebra, the orientation and the area measure are both well represented by the
determinant of a matrix made of the two spanning vectors a and b of the plane: the ori-
entation is its sign, the area measure its weight (both relative to orientation and area mea-
sure of the basis used to specify the coordinates of a and b). In 2-D, this specifies an area
element of the plane. In 3-D, such an area element would be incomplete without a specifi-
cation of the attitude of the plane in which it resides. Of course we would prefer to have a
single algebraic element that contains all this geometric information about the plane.
2.3.2 INTRODUCING THE OUTER PRODUCT
We now introduce a product between vectors to aid in the specification of the plane con-
taining the two vectors a and b. Its definition should allow us to retrieve all geometrical
properties of the plane. We denote this algebraic product by a ∧ b.
The algebraic consequence of our geometrical desire to give the plane an orientation is
that a∧b should be opposite in sign to b∧a, so that a∧b = −b∧a. When b coincides with
a, this would give the somewhat unusual algebraic result a ∧a = −a∧a. This suggests that
the square of a, using this product, must be zero. Geometrically, this is very reasonable:
the vector a does not span a planar element with itself, and we may encode that as a planar
element with weight zero.
2
When we decrease the angle between a and b, the area spanned by a and b gets smaller as
they become more parallel. In fact, in a space with a Euclidean metric you would expect
the measure of area associated with the planar element a ∧ b to be ab sin , with
the angle between them. However, we should not make such an explicit property part
of the definition of a ∧ b—it involves just too many extraneous concepts like norm and
2 We use “span” here informally, and different from the use in some linear algebra texts, where the span of two
identical vectors would still be their common 1-D subspace rather than zero. That span is not very well-behaved;
it is not even linear. In Chapter 5, its geometry will be encoded by the
join product.
SECTION 2.3 ORIENTED AREA ELEMENTS 29
angle, which are moreover intrinsically metr ic. Instead, we try to define the product so
that this metric area formula is a consequence of more basic axioms. We note that the area
measure increases linearly in the magnitude of each of the vector factors of the product.
So let us at least make the product bilinear, giving it proper scaling and distributivity
relative to the constituent vectors.
Bilinearity and antisy mmetry are already enough to define the product a ∧ b completely.
We call the result the outer product of a and b. In view of the above, its defining proper-
ties are:
Antisymmetry: a ∧ b = −b ∧ a
Scaling: a ∧ (β b) = β (a ∧ b)
Distributivity : a ∧ (b + c) = (a ∧ b) + (a ∧ c)
We pronounce a ∧ b as “a wedge b.” The outcome of the outer product a ∧ b of two
vectors is called a bivector or, more properly, 2-blade (we explain the difference between
these terms in Section 2.9.3). It is an element of the algebra we are developing that is
different from the scalars and vectors we have seen so far. Since the outer product is linear,
its outcomes are elements of a linear space, the “bivector space.” If we denote that space
by
2
R
n
, the outer product is a mapping ∧ : R
n
× R
n
→
2
R
n
.
You may think of a∧b as the span of a and b, in a quantitative manner, or as an oriented area
element of a particular homogeneous plane. Let us verify that that geometric interpretation
is indeed consistent with its algebraic properties. If we take a basis {e
1
,e
2
} in the subspace
with the same attitude as a ∧ b, we can write a = a
1
e
1
+ a
2
e
2
and b = b
1
e
1
+ b
2
e
2
.
Then, using the definition, we develop the outer product to a recognizable form:
a ∧ b = (a
1
e
1
+ a
2
e
2
) ∧ (b
1
e
1
+ b
2
e
2
)
= a
1
b
1
e
1
∧ e
1
+ a
1
b
2
e
1
∧ e
2
+ a
2
b
1
e
2
∧ e
1
+ a
2
b
2
e
2
∧ e
2
= (a
1
b
2
− a
2
b
1
) e
1
∧ e
2
(2.2)
since the antisymmetry implies that e
1
∧ e
1
= −e
1
∧ e
1
,soitmustbeequalto0—as is
any outer product of parallel vectors.
We can write the final result in terms of a determinant by introducing the matrix [[ ab]]
with, as its columns, the coefficients of a and b on the {e
1
,e
2
}-basis. This yields
a ∧ b = det([[ab]] ) e
1
∧ e
2
.
This determinant you know from linear algebra as a relative measure for the oriented
area spanned by a and b relative to the area spanned by the basis vectors e
1
and e
2
.Its
value is what we called the relative weight of a plane element. The other part of the result,
e
1
∧ e
2
, can then be consistently interpreted as the geometrical unit in which area in this
plane is measured (i.e., the amount of standard area with the correct attitude, in the plane
spanned by the basis vectors e
1
and e
2
). The orientation of the plane, and hence the relative
orientation of a ∧ b, is specified by the order of e
1
and e
2
.

30 SPANNING ORIENTED SUBSPACES CHAPTER 2
The outcome of a ∧ b neatly contains all three geomet ric properties in one algebr aic
element of computation, as we had hoped. If you want to see what happens when you
have a Euclidean metric in the plane, do structural exercise 1.
In summary, we have the following algebraic representation of the geometry of homoge-
neous planes:
a ∧ b is a weighted, oriented area element of the 2-D subspace spanned by a and b
(or other vectors producing the same attitude)
(see Figure 2.1(c), which also denotes a piece of the infinite homogeneous plane of which
a ∧ b is a part). This element a ∧ b maybecomezerowhena and b are parallel, or when
either vector has zero norm, in agreement with our geometrical intuition that no planar
element is spanned in those cases.
When we have multiple area elements in different planes in space, we cannot choose inde-
pendent bases for each of them. Yet it is still possible to decompose a ∧ b on a bivector
basis for the whole space. We demonstrate this in a 3-D space
R
3
with a totally arbi-
trary basis {e
1
,e
2
,e
3
} (not necessarily orthonormal). Let the coefficients of a and b on
this basis be a
i
and b
i
, respectively. Then we compute, using the definition of the outer
product:
a ∧ b = (a
1
e
1
+ a
2
e
2
+ a
3
e
3
) ∧ (b
1
e
1
+ b
2
e
2
+ b
3
e
3
)
= a
1
b
1
(e
1
∧ e
1
) + a
1
b
2
(e
1
∧ e
2
) + a
1
b
3
(e
1
∧ e
3
) +
a
2
b
1
(e
2
∧ e
1
) + a
2
b
2
(e
2
∧ e
2
) + a
2
b
3
(e
2
∧ e
3
) +
a
3
b
1
(e
3
∧ e
1
) + a
3
b
2
(e
3
∧ e
2
) + a
3
b
3
(e
3
∧ e
3
)
(2.3)
= (a
1
b
2
− a
2
b
1
) e
1
∧ e
2
+ (a
2
b
3
− a
3
b
2
) e
2
∧ e
3
+ (a
3
b
1
− a
1
b
3
) e
3
∧ e
1
This cannot be simplified further. We see that an outer product of two vectors in 3-D
space can be written as a scalar-weighted sum of three standard elements e
1
∧ e
2
, e
2
∧ e
3
,
e
3
∧ e
1
. Their weighting coefficients are obviously 2-D determinants, which we know
represent directed area measures, now of the components of the original plane on the
coordinate planes of the basis. The formula is then consistent with the interpretation
of these three elements as standard area elements for the coordinate planes of the basis
vectors.
It is a pleasant surprise that area elements in 3-D have such a decomposable struc-
ture as a weig hted sum over a basis. Mathematically, this means that they reside
in their own bivector space of
2
R
3
, of three dimensions, with basis elements
e
12
≡ e
1
∧ e
2
, e
23
≡ e
2
∧ e
3
, e
31
≡ e
3
∧ e
1
.
3
3 This bivector space satisfies the mathematical axioms of a vector space, but it would be geometrically confusing
to call its elements vectors. We will reserve the term vector exclusively for the elements of
R
n
.

SECTION 2.3 ORIENTED AREA ELEMENTS 31
Any area element of the form a ∧ b can be decomposed onto a basis of standard
area elements.
In 3-D space, the converse also holds: a weighted sum of basis 2-blades is an area element
that can be factorized by the outer product in the form a ∧ b. But that property does
not hold in n-dimensional space; you cannot in general make factorizable 2-blades of the
form a ∧ b simply by adding basis bivectors w ith arbitrary weights. We get back to this
important issue in Section 2.9.
With the outer product, we can generate additional structure from our initial 3-D vector
space
R
3
and its real scalars R. You already know from linear algebra that determinants
of 2 × 2 matrices with 2-D vectors as columns are scalar areas, and that determinants of
3 × 3 matrices of 3-D vectors are scalar volumes; now we also have 2-D-oriented areas
spanned by 3-D vectors as a 3-D linear space of 2-D determinants. Subspaces and their
measures are beginning to fall into a new pattern.
2.3.3 VISUALIZING BIVECTORS
The algebraic properties of a bivector in 3-D are equivalent to those of a directed area
element. It is good to get a mental picture of such area elements, and of their interac-
tion using addition, that stays close to their algebraic properties. This will help us to “see”
bivectors in problems and their solutions.
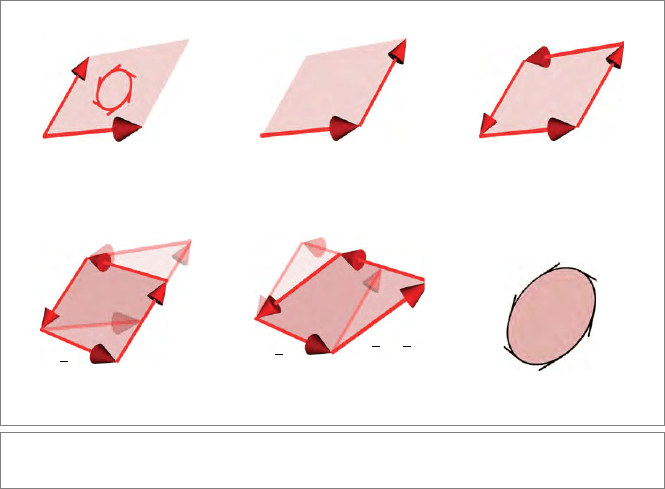
A first attempt might be Figure 2.3(a): a∧b as the parallelogram spanned by a and b. Since
that does not convey the orientation (it looks commutative rather than anticommutative),
we need to denote this orientation by something extra, such as by the oriented circular
arc inside. We could also use a representation like Figure 2.3(b), in which the orientation
follows naturally from the order of the arrows. We can extend this to show some more of
the anticommutativity of the construction, which implies a ∧b = (−b ∧ a) = b ∧ (−a) =
(−a) ∧(−b) by showing all of those four vectors along the border, as in Figure 2.3(c). This
shows that none of the vertices of the parallelog ram can be seen as an anchor. Therefore
the depiction of the bivector is free to move translationally within its carrier plane, thoug h
we will prefer drawing it near the origin. Also, since a ∧ a = 0, we have to remember that
drawing the corresponding parallelogram is equivalent to drawing nothing at all, r ather
than some flattened shape.
Not only can we imagine sliding the bivector out of the origin, but we can also reshape it in
some ways without changing its algebraic value. Anticommutativity of the outer product
implies, for instance, that (a −
1
2
b) ∧ b = a ∧ b = (a −
1
2
b) ∧ (
1
2
a +
3
4
b). Therefore, we
are allowed to reshape the parallelogram geomet rically by sliding the arrows along any
of its parallel sides (Figure 2.3(d, e)), obtaining another faithful depiction of the same
bivector a ∧b. If you have a coordinate system, there may be an advantage to redrawing the
bivector to have sides to be alig ned with the coordinate vectors. But you should realize that
there is no unique way of doing this; since a∧b = (2a) ∧(b/2) , and so on, the magnitudes
of the components are adjustable (as long as area and orientation remain the same).
32 SPANNING ORIENTED SUBSPACES CHAPTER 2
a
a ∧ b
b
a
a ∧ b
b
a
−b
−a
b
a ∧ b
b
a ∧
b
a ∧ b
a −
1
2
b
a −
1
2
b
1
2
a
+
3
4
b
a ∧ b
(a) (b) (c)
(d) (e) (f)
Figure 2.3: Bivector representations.
In fact, as soon as we have computed a bivector quantity, we have lost the identity of the
vectors that generated it. We may therefore prefer to denote it by a circular area in the
plane, as in Figure 2.3(f) (as long as we realize that even this circular shape is arbitrary).
We cannot emphasize enough that these redrawings all represent the same element. The
algebraic bivector is not specific on shape; geometrically, it is an amount of oriented area
in a specific plane, that’s all. Initially, this may appear too vague to be useful; but we will
soon see that this “reshapeability” is a strength, not a weakness.
2.3.4 VISUALIZING BIVECTOR ADDITION
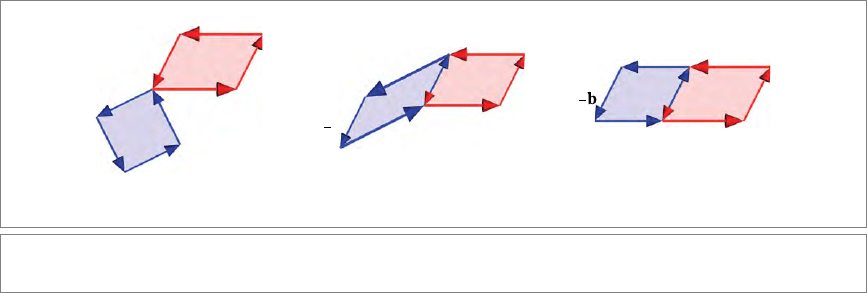
We can also make a geometrical representation of bivector addition. In the same plane,
addition of bivectors can be done by reshaping them until they can be added visually,
preserving both magnitude and orientation of their area during the reshaping, (see Fig-
ure 2.4). To add c ∧d to a∧b (assumed to be in the same plane!), first reshape c∧d to be of
the form (γc) ∧( −b); see Figure 2.4(b). Place them side to side so that the (−b) side of the
first bivector matches the b side of the second. Then reshape the area again, so that c ∧ d
is finally of the form αa ∧ b, as in Figure 2.4(c). Now the result is obviously (1 + α)a ∧ b.
But of course, you could change the order of the arguments and do not really need to do
the reshaping at all. It is just a matter of putting oriented areas together and algebraically
it is handled automatically by adding their coefficients relative to a bivector basis.
SECTION 2.4 ORIENTED VOLUME ELEMENTS 33
a∧b
c∧d
c
d
a
b
a
a ∧ b
b
b
c ∧ d
γc
a ∧ b
c
∧ d
b
aαa
(a) (b) (c)
Figure 2.4: Imagining bivector addition in 2-D space.
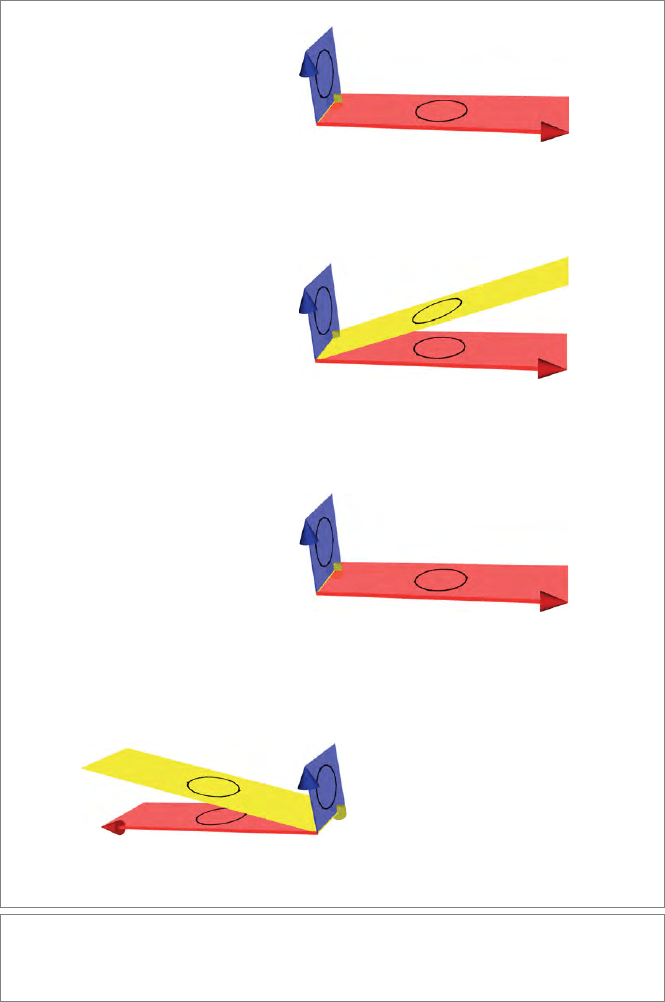
Now consider the addition of two bivectors in R
3
. In 3-D space, two homogeneous planes
intersect in at least a homogeneous line, so two bivectors must have some vector in com-
mon. Calling this vector e, we can then reshape the two addends to have e asafactor.
Then they are both aligned with e, and the bivector addition reduces to vector addition.
For example, we compute (3e
1
∧e
2
)+ (e
3
∧e
2
) (as illustrated in Figure 2.5(a)) by factoring
out e = e
2
and adding 3e
1
and e
3
(Figure 2.5(b)). You have to be a bit careful, since you
may have to change the sign of one of the vectors before adding (Figures 2.5(c, d)) due to
the antisymmetry of the outer product.
In higher-dimensional spaces, this geometric construction is likely to fail, since in general
you will not be able to find a common 1-D direction for two planes. Algebraically this
corresponds to the fact that not all bivectors can be factored as the outer product of two
vectors; we call the ones that can 2-blades. The algebraic difference between bivectors and
2-blades will be treated in detail in Section 2.9.3.
2.4 ORIENTED VOLUME ELEMENTS
2.4.1 PROPERTIES OF VOLUMES
We now consider representations of oriented volumes. By analogy with homogeneous
lines and planes, volumes can be treated as 3-D homogeneous subspaces of a vector space
R
n
. They have the geometric properties we found for lines and planes, illustrated by anal-
ogy in Figure 2.1(d).
•
Although it is somewhat hard to visualize for us 3-D beings, volumes have an atti-
tude in spaces of more than three dimensions, denoting the 3-D subspace that con-
tains them. In a 3-D space there is, of course, only one choice—all volumes are
proportional to the volume of the unit cube.
34 SPANNING ORIENTED SUBSPACES CHAPTER 2
e
2
e
3
3e
1
∧ e
2
e
3
∧ e
2
3e
1
e
2
e
3
∧ e
2
e
3
3e
1
∧ e
2
3e
1
e
2
∧ 3e
1
e
2
e
3
e
3
∧ e
2
3e
1
(a)
(b)
(c)
−3e
1
∧ e
2
(−3e
1
+ e
3
) ∧ e
2
e
3
∧ e
2
e
2
e
3
−3e
1
(d)
(3e
1
+ e
3
) ∧ e
2
Figure 2.5: Bivector addition in 3-D space: orientation matters. (a),(b): (3e
1
∧ e
2
)
+ (e
3
∧ e
2
) = (3e
1
+ e
3
) ∧ e
2
; (c),(d): (e
2
∧ 3e
1
) + (e
3
∧ e
2
) = (−3e
1
+ e
3
) ∧ e
2
, which is a different
bivector.
SECTION 2.4 ORIENTED VOLUME ELEMENTS 35
•
The volume has an orientation, usually referred to as handedness. In the 3-D space
of our example, the volume spanned by e
1
, e
2
, e
3
(in that order), has opposite orien-
tation from that spanned by e
1
, e
2
, −e
3
(in that order); use a mirror in the (e
1
∧e
2
)
plane to see this. The latter has the same orientation as the volume spanned by
e
2
, e
1
, e
3
(in that order—use two more mirrors), and of any odd permutation of
(e
1
, e
2
, e
3
). Orientation of volumes is thus an antisymmetric propert y, and there-
fore there exist only two different orientations (a glove can be right-handed or left-
handed—that’s all).
•
Volume has a scalar weight. It is well known from linear algebra that in 3-D space the
signed magnitude of the volume spanned by a, b, and c is proportional to the deter-
minant of the coefficient matrix [[ abc]] with a, b, and c as columns. It is therefore
an antisymmetric linear function of the vectors.
We should try to find an algebraic product to represent these geometric properties of
volumes.
2.4.2 ASSOCIATIVITY OF THE OUTER PRODUCT
The antisymmetry we signaled in the classical characterization of volume measures is a
clue to its representation in our new algebra. We simply attempt to extend the “span”
operation of the outer product to more than two terms. Algebraically, the most natural
way is to define the outer product to be associative:
associativity: (a ∧ b) ∧ c = a ∧ (b ∧ c).
We can thus write the volume element as a ∧b ∧c without ambiguity. (You should realize
that the outer product is still pairwise antisymmetric, so that a ∧ b ∧ c = −a ∧ c ∧ b =
c ∧ a ∧ b, etc.) Geometrically, this property would imply that we can span the same
oriented volume in different ways as the span of a planar element and a vector; if that were
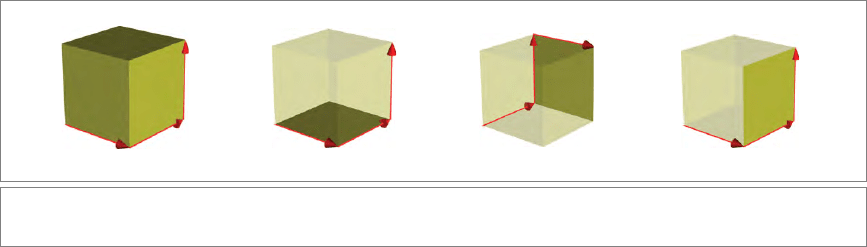
not true, this algebraic formalization would be inappropriate. Fortunately, Figure 2.6 con-
firms the geometric validity of the algebraic associativity. It visualizes the volume a ∧b ∧c
in several equivalent ways, all leading to the same oriented amount of 3-space.
===b
a
c
b
c
(a ∧ b)∧ c
a
a
b
c
b ∧ (c ∧ a)
a
b
c
a ∧ (b ∧ c)
Figure 2.6: The associativity of the outer product.
36 SPANNING ORIENTED SUBSPACES CHAPTER 2
We call the element formed as the outer product of three vectors a trivector or 3-blade (the
difference is explained in Section 2.9.3). To verify its interpretation, we may int roduce
an arbitrary basis {e
1
, e
2
, e
3
} in R
3
. Then the defining properties of the outer product
yield
a ∧ b ∧ c =
= (a
1
e
1
+ a
2
e
2
+ a
3
e
3
) ∧ (b
1
e
1
+ b
2
e
2
+ b
3
e
3
) ∧ (c
1
e
1
+ c
2
e
2
+ c
3
e
3
)
(2.4)
= (a
1
b
2
c
3
− a
1
b
3
c
2
+ a
2
b
3
c
1
− a
2
b
1
c
3
+ a
3
b
1
c
2
− a
3
b
2
c
1
) e
1
∧ e
2
∧ e
3
.
Therefore, any trivector in space
R
3
is a multiple of the trivector e
1
∧ e
2
∧ e
3
. The pro-
portionality is the determinant of the spanning vectors on the basis {e
1
, e
2
, e
3
},whichwe
recognize as the (relative) volume and its sign as the orientation relative to e
1
∧e
2
∧e
3
.In
linear algebra, we would write that scalar as the determinant det([[abc]] ) of the matrix,
with a, b, and c as columns. So the properties of a volume in the 3-D space
R
3
may
be characterized by a scalar, at least if we have agreed upon some convention about the
order of the basis elements (i.e., a handedness of the basis). That is indeed how it is done
classically.
In subtle difference, our algebra of the outer product permits us to treat a volume ele-
ment as a single trivector. This is tidier, since it requires no bookkeeping of an extraneous
convention: as the handedness of the basis changes, the trivector coefficient automatically
changes its orientation appropriately. It is also clearly different from a scalar, even in 3-D
space, because it has the geometrical unit volume as part of its value. We can therefore
clearly express what happens when that is chosen differently (for instance, with a left-
handed rather than right-handed orientation). Moreover, this representation of volume
elements as the outer product of three vectors carries over unchanged to spaces of arbi-
trary dimensionality, and those will be surprisingly important, even for computations on
3-D space.
2.4.3 VISUALIZATION OF TRIVECTORS
In our geometric verification of associativity, we met the obvious v isualization of a 3-blade
a ∧ b ∧ c in Figure 2.6, relating it to its vector factors a, b, and c.
Of course, this amount of oriented volume may be sheared (similar to what we did to
bivectors) as long as you do not change magnitude or orientation. If you have a basis, it is
sometimes convenient to align it with the basis vectors. If there are no vectors available,
just a trivector, you could draw it as a spherical volume, with some convention on how to
denote its orientation.
In
R
3
, the algebraic addition of trivectors is just a matter of adding their signed scalar
magnitudes. Since that has no aspects of geometrical attitude, explicit visualization of
trivector addition in 3-D is not really useful.