Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

21
FUNDAMENTAL
ALGORITHMS FOR
NONLINEAR PRODUCTS
In the previous chapter, we looked at how to implement the linear products in geometric
algebra. The linearity of these products allowed us to implement them using linear alge-
bra or through a simple double loop. However, there are other operations in geometric
algebra that are nonlinear (such as inverse,
meet, join, and factorization). These cannot
be implemented in the same way.
In this chapter, we discuss the implementation of such nonlinear geometric algebra oper-
ations. The nonlinearity results in more complex algorithms, still reasonably efficient but
typically an order of magnitude more time-consuming than linear operations.
We give algorithms for the inverse, for exponentiation, for testing whether a multivector
is a blade or a versor, for blade factorization, and for the efficient computation of
meet
and join.
21.1 INVERSE OF VERSORS (AND BLADES)
We need to compute the inverse of the elements we construct in geometric algebra. Those
are almost exclusively blades or versors (the only exceptions were the bivectors in an
exponent, and we have no need to invert those). Invertible blades are always versors, since
529
530 FUNDAMENTAL ALGORITHMS FOR NONLINEAR PRODUCTS CHAPTER 21
a k-blade (the outer product of k vectors) can always be written as the geometric product
of k vectors (i.e., a k-versor); see Section 6.4.1. So if we can invert a versor V, we can also
invert blades and thus most of the elements we construct.
There is a very efficient way to invert versors, which we call the versor inverse method
(because, in general, it works only on versors). This inversion is almost trivial. It starts
with the observation that the quantity V
V is always scalar for any versor V. This is easily
seen by factorizing the versor:
V
V = (v
k
···v
2
v
1
)(v
1
v
2
···v
k
) = (v
k
···(v
2
(v
1
v
1
) v
2
) ···v
k
) = v
2
k
···v
2
2
v
2
1
.
The inverse of the versor is then simply
V
−1
=
V/(V
V ).
(21.1)
This method would fail if makes V
V = 0. But in that case (which may occur when one
of the vector factors is a null vector), the multivector V is actually not a versor (since all
versors are invertible by definition). V is then not actually a versor since versors are always
invertible.
21.2 INVERSE OF MULTIVECTORS
As long as you stay within the bounds of geometric algebra (as opposed to Clifford algebra;
see Section 7.7.2 for our take on the difference), the versor inverse method should cover
all of your inversion needs. But should the need arise to invert a general multivector, you
can use the following technique to invert any invertible multivector. It is based on the
linear algebra implementation approach described in Section 20.1. Since
AB
[[ A
G
]] [[ B]] ,
it follows that
A
−1
B [[ A
G
]]
−1
[[ B]]
(just left-multiply both sides by A and [[ A
G
]] ). So the matrix of the inverse of A is the
inverse of the matrix of A. This insight can be used to invert any multivector A as long as
the matrix [[ A
G
]] is invertible, using the following steps:
•
Compute the geometric product matrix [[ A
G
]] ;
•
Invert this matrix;
•
Extract [[ A
−1
]] as the first column of [[ A
G
]]
−1
.
To understand why the last step is correct, inspect the algorithm for computing the geo-
metric product matrix. With the scalar 1 as the first element of
L, the first column of the
matrix [[ A
G
]] is constructed from the geometric product of A with the first element of L,
which is 1. Therefore the first column of a geometric product matrix [[ A
G
]] is [[ A]] itself
(this may also be observed in Figure 20.1). Hence we find the coefficients of A
−1
as the
first column of [[ ( A
−1
)
G
]] = [[ A
G
]]
−1
.

SECTION 21.3 EXPONENTIAL, SINE, AND COSINE OF MULTIVECTORS 531
This inversion method has two main disadvantages: it is both slow and numerically
imprecise due to floating point round-off errors. Therefore, you should not use it to invert
a blade or a versor—use the method of Section 21.1 for those.
21.3 EXPONENTIAL, SINE, AND COSINE
OF MULTIVECTORS
The exponential and trigonometric functions were introduced for blades in Section 7.4.2.
For easy reference, we repeat the equations for the polynomial expansion of the
exponential:
exp(A) = 1 +
A
1!
+
A
2
2!
+ ···
If the square of A is a scalar, this series can be easily computed using standard trigono-
metric or hyperbolic functions:
exp(A) =
⎧
⎪
⎨
⎪
⎩
cos α + A
sin α
α
if A
2
= −α
2
1 + A if A
2
= 0
cosh α + A
sinh α
α
if A
2
= α
2
,
where α is a real scalar. Since both a versor and a blade have scalar squares, their exponen-
tials are easy to compute by directly applying these formulas.
Unfortunately, we will need to take exponentials of nonblade elements. The exponen-
tials of general bivectors generate the continuous motions in a geometry, and only in
fewer than four dimensions are bivectors always 2-blades. In the important conformal
model, rigid body motions are exponentials of bivectors that are not 2-blades, as we saw
in Section 13.5. So we need techniques to process them.
When the special cases do not apply, the series for the exponential can be evaluated explic-
itly up to a certain order. This tends to be slower and less precise. Experience shows that
evaluating the polynomial series up to order 10 to 12 gives the best results for 64 bit dou-
bles. For the exponential, a rescaling technique is possible that will increase accuracy, as
follows.
Suppose you want to compute exp(A).IfA is a lot larger than unity, A
k
can be so large that
the series overflows the accuracy of the floating-point representation before it converges.
To prevent this problem, we can scale A to near unity before evaluating the series, because
of the identity
exp(A) =
exp
A
s
s
.
For our purposes, any s ≈A will do. In a pra ctical implementation, we choose s to be a
power of two, so that we can efficiently compute
exp
A
s
s
by repeatedly squaring exp(
A
s
).
532 FUNDAMENTAL ALGORITHMS FOR NONLINEAR PRODUCTS CHAPTER 21
21.4 LOGARITHM OF VERSORS
We do not know of a general algorithm for computing the logarithm of arbitrary versors.
However, for many useful cases a closed-form solution was found; see, for example,
Section 10.3.3 (rotation), Section 13.5.3 (rigid body motion), and Section 16.3.4 (pos-
itively scaled rigid body motion). We have not yet included these logarithms in our refer-
ence implementation, but you can find a C++ implementation of these logarithms in the
GA sandbox source code package.
21.5 MULTIVECTOR CLASSIFICATION
At times, it may be useful to have an algorithm that classifies a multivector as either a
blade, a versor, or a nonversor. For instance, classification is useful as a sanity check of
interactive input, or to verify whether and how a result could be displayed geometrically.
Yet testing whether a multivector is a versor or a blade is nontrivial in our additive
representation. A blade test requiring that the multivector is of a single grade is insufficient
(for example, e
1
∧ e
2
+ e
3
∧ e
4
is of unifor m grade 2, but not a blade). Adding the rule that
the square of the multivector must be a scalar does not help (since e
1
∧e
2
∧e
3
+ e
4
∧e
5
∧e
6
squares to −2 in a Euclidean metric, but it is not a blade).
The classification algorithm below (from [7]) performs this test correctly. It is one algo-
rithm that can be used either for the versor test or for the blade test. It is natural that these
tests should structurally be very similar, for all invertible blades are also versors. As you
glance through it, you notice that the algorithm uses inverses. This is fine for a versor test,
since versors need to be invertible by definition. However, a blade need not be invertible,
and yet null blades are still blades.
In fact, “being a blade” is defined as “factorizable by the outer product”, and that
does not depend on a metric at all. Our reference [7] makes good use of this freedom:
if you are testing whether V is a blade, you must perform the geometric products in
the algorithm using a Euclidean metric. This choice of convenience eliminates all null
blades that would have had to be taken into account without actually affecting factor-
izability, and that simplifies the algorithm. (As an example, the multivector e
1
∧∞ is
a blade, but in the conformal metric contains a null factor ∞. This makes the blade
noninvertible, but it is of course still a blade. By using a Euclidean metric, ∞ is treated
as a regular vector, the blade becomes invertible, and the test can run as it would for
e
1
∧ e
2
).
On the other hand, determining whether a multivector V is a versor (i.e., a geometric
product of invertible vectors) clearly depends on the precise properties of the metric.
So for a versor test, you have to run this algorithm in the actual metric of the algebra
of the versor.
SECTION 21.6 BLADE FACTORIZATION 533
The classification process for V consists of three parts:
1. Test if the versor inverse
V/(V
V ) is truly the inverse of the multivector V. This
involves the following tests:
grade(
VV
−1
)
?
= 0,
VV
−1
?
= V
−1
V.
If either of these test fails, we can report that the multivector is a nonversor, and
hence a nonblade.
The use of grade involution in the two equations above is an effective trick from [9].
It prevents multivectors that have both odd and even grade parts from sneaking
through the test. If V is an even versor, then
V = V.IfV is an odd versor,
V = −V.
But if V has both odd and even grade parts, the grade involution prevents odd and
even parts from recombining in such a way that they cancel each other out. See
structural exercise 21.8 for an illuminating example.
2. The second test is on the grade preservation properties of the versor: applying a
versor (and hence an invertible blade) to a vector should not change the grade. So
for each basis vector e
i
of the vector space R
n
, the following should hold if V is a
versor:
grade(
V e
i
V )
?
= 1.
When the multivector does not pass this test, we report a nonversor (and hence a
nonblade); otherwise we know that it is either a versor or a blade.
3. The final part makes the distinction between blades and versors by simply checking
whether the multivector is of a single grade. If so, it is a blade; otherwise it is a
versor.
Unfortunately, we currently have no general solution to the problem of determining
the ty pe of multivectors that are not quite blades or not quite versors in a numerically
informed manner. We would like to correct any numerical drift in these fundamental
properties due to repeated floating point round-off errors, but we do not know how to
make versors or blades out of almost-versors and almost-blades in an optimal way in gen-
eral metrics.
21.6 BLADE FACTORIZATION
This section deals with generic factorization of blades. That is the problem to find, for a
given blade B of grade k,asetofk vectors b
i
such that
B = b
1
∧ b
2
∧···b
k
.
You may want to factorize a blade because you want to use it as input to libraries that
cannot handle blades (such as standard libraries for linear algebra or computer graphics),

534 FUNDAMENTAL ALGORITHMS FOR NONLINEAR PRODUCTS CHAPTER 21
so that you are required to process their vector factors separately. Or you may need a
factorization to implement another low-level algorithm such as the computation of
meet
and join below.
We are only concerned with the outer product and consequently (as in the previous
section) are allowed to choose any convenient metric. To avoid any problems with null
vectors, we use the Euclidean metric for all metric products in the algorithm that follows.
A first step towards a useful factorization algorithm is finding potential factors of a blade
B. This can be done using projection. Take any candidate vector c (for example, a basis
vector), and project it onto B:
f = (cB) B
−1
.
If f is 0, then another candidate vector should be tried. For better numerical stability, we
should also try another candidate when f is close to 0 (or better yet, try many different
candidate vectors and use the one that results in the largest f ). In any case, when f is a
usable factor we can remove it from B simply by dividing it out:
B
f
= f
−1
B.
(21.2)
Then we can write (see structural exercise 2)
B = f ∧ B
f
,
so that we have found our first factor of B. We now repeat this process on the blade B
f
,
iteratively, until we are left with a final vector factor.
1
This basic idea works, but the procedure may be inefficient in high-dimensional spaces.
Many candidate vectors may result in a zero value for f, which is a waste of effort. It is
better to use the structure of B itself to limit the search for its factors in an efficient, stable
technique, as follows. The blade B, as given, is represented as coordinates relative to a basis
of blades. We take the basis blade with the absolute largest coordinate on this basis. Let
that be E = e
i
1
∧ e
i
2
∧ ... ∧ e
i
k
. We then use the basis vectors that make up E as candidate
vectors for projection. This selection procedure guarantees that the projection of each of
the candidate vectors is nonzero (we show this at the end of this section).
One final issue is the scaling of each of the factors. Due to the projection, the factors
do not have a predictable scale, which is an awkward property. Our implementation of
the factorization algorithm normalizes the factors and returns the scale of the blade as a
separate scalar.
2
1 We remove the factor f from B, because we want the factors to be orthogonal. If you just want factors that make
up
B and don’t care about orthogonality or scale, you may adjust the algorithm to use the original B in each loop
of the final algorithm below. But you must then make sure that your factors are linearly independent.
2 Other solutions are to premultiply the first factor with the scale, or to apportion the scale evenly over each factor.
Which method is most convenient may partly depend on the subsequent use of the factorization. In any case,
the unit factors with a separate scale can be transformed into any of the other representations easily.

SECTION 21.6 BLADE FACTORIZATION 535
The final algorithm [6, 8] for factorizing a blade becomes:
1. Input: a nonzero blade B of grade k.
2. Determine the norm of B: s = B.
3. Find the basis blade E in the representation of B with the largest coordinate;
determine the k basis vectors e
i
that span E.
4. Let the current input blade be B
c
← B/s.
5. For all but one of the basis vectors e
i
of E:
(a) Project e
i
onto B
c
: f
i
= (e
i
B
c
) B
−1
c
.
(b) Normalize f
i
. Add it to the list of factors.
(c) Update B
c
: B
c
← f
−1
i
B
c
.
6. Obtain the last factor: f
k
= B
c
. Normalize it.
7. Output: the factors f
i
and the scale s.
Some notes on metric are in order. First, the algorithm also works for null blades, since no
blade is actually null in the Euclidean metric that is used during the factorization algo-
rithm itself. Second, the output of the algorithm is a set of orthonormal factors in the
Euclidean metric that was used within the algorithm. That may not be the metric of the
space of interest. If you desire orthonormality in some other metric, construct the metric
matrix of the factors, perform an eigenvalue decomposition, and use this to construct an
orthonormal set of factors (see also Section 19.4).
To see why the projection of e
i
on B
c
is never zero (step 5a), note that there always exists
arotorR that turns E to the original B. This rotor will never be over 90 degrees (for that
would imply that EB = 0, yet we know that EB must be nonzero to be the basis blade
with the largest coordinate in B). We may not be able to compute the rotation R easily, but
we can find R
2
= RR= BE
−1
. Since R is never over 90 degrees, R
2
willneverbeover180
degrees. Because of this, the quantity
1
2
(e
i
+ R
2
e
i
/R
2
) must be nonzero: no e
i
is rotated
far enough by R
2
to become its own opposite. We rewrite this and find:
0 =
1
2
(e
i
+ R
2
e
i
/R
2
)
=
1
2
(e
i
+ BE
−1
e
i
EB
−1
)
=
1
2
(e
i
− BE
−1
Ee
i
B
−1
)
=
1
2
(e
i
−
Be
i
B
−1
)
= (e
i
B) B
−1
.
Therefore none of the e
i
from E projects to zero on B,sof
1
is nonzero in the first pass of
the algorithm. After removal of f
1
, the same argument can be applied to the next e
i
on B
c
,
and so on. Hence none of the f
i
are zero.

536 FUNDAMENTAL ALGORITHMS FOR NONLINEAR PRODUCTS CHAPTER 21
21.7 THE MEET AND JOIN OF BLADES
When we introduced the meet and join of blades in Chapter 5, we saw that they are in
some sense the geometrical versions of intersection and union from set theory. We can
use this correspondence to compute them. To simplify the description of the algorithm,
we first illustrate some of the basic ideas with regular set theory and Venn diagrams and
then transfer them to
meet and join.
Figure 21.1(a) shows a Venn diagram of two nondisjoint sets A and B, their union, A ∪ B,
and their intersection, A ∩ B. We introduce a symmetric set difference through a delta
product, defining A
M B as A ∪ B minus A ∩ B. T his is illustrated in Figure 21.1(d). We
also use the complement (A
M B)
∗
as illustrated in Figure 21.1(e). The dashed line along
the border of Figure 21.1(e) indicates that ( A
M B)
∗
extends to include all elements that
are not in A or B.
Suppose that we have a function s() that determines the size of a set. We can relate the size
of the various sets through
s(A ∪ B) =
s(A) + s( B) + s(A
M B)
2
. (21.3)
To see why this holds, first convince yourself that
s(A) + s( B) = s(A ∪ B) + s(A ∩ B),
and then superimpose Figure 21.1(b), Figure 21.1(c), and Figure 21.1(d). Note that every
area is covered twice, hence the division by 2 in (21.3). Likewise,
A
B
A ∪ B
A ∩ B
a)
b)
c)
d)
e)
(A B)*
A B
A B
Figure21.1: Venn diagrams illustrating union, intersection, and the delta product of two sets.
(a) Two sets A and B, (b) the union A ∪ B, (c) the intersection A ∩ B, (d) the delta product A
B,
and (e) The dual of the delta product (A
B)
∗
.
SECTION 21.7 THE MEET AND JOIN OF BLADES 537
s(A ∩ B) =
s(A) + s( B) − s(A
M B)
2
. (21.4)
The
meet and join products are the geometrical versions of set intersection and union,
respectively, applied to blades rather than sets. They really work on the bases spanning the
blades, and are in that sense discrete. We want to compute the
join of two blades A and
B. Instead of thinking of A and B as continuous oval blobs, think of them of as discrete
factors, united by a boundary. That converts Figure 21.1 into Figure 21.2. Let us assume
that A and B can be factored as
A = a
1
a
2
c,
B = cb
1
.
This means that A and B have one factor c in common, and a
1
, a
2
, and b
1
are independent
(how we arrive at this factorization is discussed later on). Figure 21.2(a) illustrates this
basic setting. Obviously, A ∩ B is proportional to c (Figure 21.2(c)), and the A ∪ B is
proportional to a
1
∧ a
2
∧ c ∧ b
1
(Figure 21.2(b)). Figure 21.2(d) illustrates A M B, and
Figure 21.2(e) illustrates (A
M B)
∗
.
The algorithm for computing the
meet and join [6, 8] presented in this section first
computes the required grade of the
meet and join, for which we need the delta product
for blades (from [8]). Then it works towards constructing either the
meet or the join.
As we observed in Section 19.3, the geometric product acts like a spatial exclusive or
on basis blades. The same is true for regular blades when we focus on highest nonzero
grade part of the geometric product: it is the spatial exclusive or of the blades since
it contains all the factors that do not occur in both arguments. In our example,
a
1
b
1
a
2
c
A
B
a
1
b
1
a
2
c
a
1
b
1
a
2
c
a
1
b
1
a
2
c
a
1
b
1
a
2
c
a)
b)
c)
d)
e)
A ∪ B
A B
(A B)*
A ∩ B
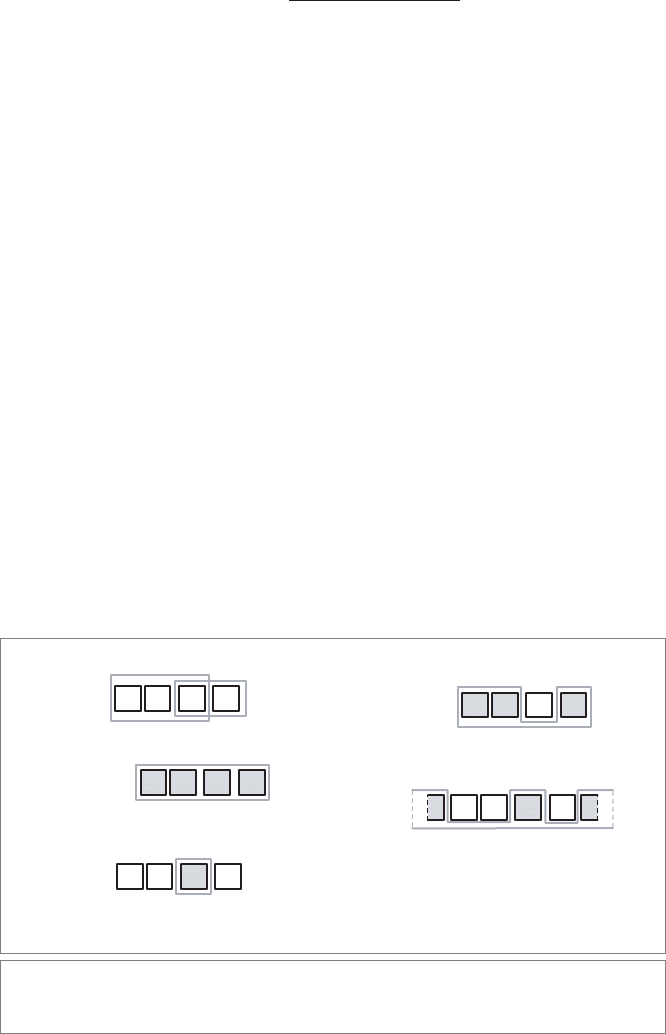
Figure 21.2: Venn diagrams illustrating Meet, Join, and the delta product of two blades.
A = a
1
∧ a
2
∧ c, B = c ∧ b
1
(see also Figure 21.1).

538 FUNDAMENTAL ALGORITHMS FOR NONLINEAR PRODUCTS CHAPTER 21
AB= (a
1
a
2
c)(cb
1
) = (c · c) a
1
a
2
b
1
.
Note that we do not need to factorize the blades explicitly to get this result. The geometric
product automatically eliminates the dependent factors. So the top grade part of a geo-
metric product ABis a blade that contains all factors that were present in either A or B.
We call this the delta product of blades, and define it as follows:
A
M B ≡AB
max
where max is the largest grade such that A M B is not zero. The delta refers to the
property of the delta product to compute the blade that contains factors that are
present in either of the arguments, which makes it like the symmetric difference of
the factors in ABwhich we discussed above.
Once we have the delta product of blades, we can derive the following useful relations by
analogy to (21.3) and (21.4):
grade(A ∪ B) =
grade(A) + grade(B) + grade(A
M B)
2
(21.5)
grade(A ∩ B) =
grade(A) + grade(B) − grade(A
M B)
2
(21.6)
Our
meet algorithm starts with a scalar, and expands it by the outer product with new
vectors until it arrives at the true
meet. Potential factors of the meet satisfy the following
conditions, which you may verify using Figure 21.2.
•
They are not factors of the delta product;
•
They are factors of A and B.
Likewise, the algorithm initially assumes that the
join is the pseudoscalar, and removes
factors from it until the true
join is obtained. Factors that should not be in the join sat-
isfy the following conditions:
•
They are factors of the dual of the delta product;
•
They are not factors of A and B.
Before we can formulate the algorithm, we repeat two relations from Section 5.3:
A ∪ B = A ∧ ((A ∩ B)
−1
B)
(21.7)
A ∩ B = (B(A ∪ B)
−1
)A (21.8)
These equations can be used to obtain the
join from the meet, and vice versa. We now
have enough building blocks to construct an algorithm to compute the
meet and join:
1. Input: two blades A, B, and possibly a threshold for the delta product.
2. If grade(A) > grade(B), swap A and B. This may engender an extra sign, so be
careful when you need to interpret the results (see Section 5.6).