Долгая М.В. Конспект лекций по дисциплине Основы компьютерной графики
Подождите немного. Документ загружается.

21
перспективы» обратно пропорционален расстоянию между глазом и объектом. Опишем
координаты центра проектирования в сферических координатах.
ϕρ
θϕρ
θ
ϕ
ρ
cos
sinsin
cossin
=
=
=
ZE
YE
XE
Мировая система координат правосторонняя, а видовая система координат, т.е. система
координат, центром которой является центр проектирования или точка наблюдения –
левосторонняя.
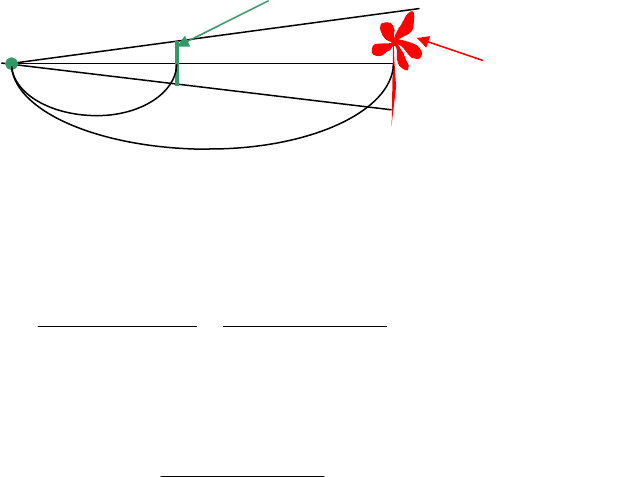
Рисунок 3.4 – Определение расстояния до картинной плоскости
Расстояние d определяется из пропорции
d
картины размеробъекта размер
=
ρ
.
А, следовательно, расстояние от наблюдателя до картинной плоскости
объекта размер
картины размер
ρ
=d .
Объект
d
ρ
S
КАРТИННАЯ
22
Лекция 4. АЛГОРИТМЫ РАСТРОВОЙ ГРАФИКИ
4.1 АЛГОРИ
ТМ ВЫЧЕРЧИВАНИЯ ОТРЕЗКОВ
Поскольку экран растрового дисплея с электронно-лучевой трубкой можно рассматривать как
матрицу дискретных элементов (пикселей) каждый из которых может быть подсвечен, нельзя
непосредственно провести отрезок из одной точки в другую. Процесс определения пикселей,
наилучшим образом аппроксимирующих заданный отрезок, называется разложением в растр. В
сочетании с процессом построчной визуализации изо
бражения он известен как преобразование
растровой развертки. Для горизонтальных, вертикальных и наклоненных под углом 45 °
отрезков выбор растровых элементов очевиден. При любой другой ориентации выбрать нуж-
ные пикселы труднее, что показано на рис. 4.1.
Постоянная вдоль всего отрезка яркость достигается лишь при проведении
горизонтальных, вертикальных и наклоненных под углом 45° прямых. Для всех других
ори
ентации разложение в растр приведет к неравномерной яркости, как это показано на рис. 4.1.
Даже для частных случаев яркость зависит от наклона: заметим, например, что расстояние между
соседними пикселями для отрезка под углом 45° больше, чем для вертикальных и горизонтальных
прямых. Поэтому вертикальные и горизонтальные отрезки будут выглядеть ярче, чем наклонные.
Обеспечение о
динаковой яркости вдоль отрезков разных длин и ориентации требует извлечения
квадратного корня, а это замедлит вычисления. Обычным компромиссом является нахождение
приближенной длины отрезка, сведение вычислений к минимуму, предпочтительное
использование целой арифметики, а также реализация алгоритмов на аппаратном или
микропрограммном уровне.
В большинстве алгоритмов вычерчивания отрезков для упрощения вычислений
используется по
шаговый метод. Приведем пример подобного алгоритма:
Простой пошаговый алгоритм
позиция = начало
1 if позиция — конец < точность then 4
if позиция > конец then 2
if позиция < конец then 3
2 позиция = позиция — шаг goto 1
3 позиция = позиция + шаг до to l
4 finish
Простой алгоритм разложения отрезка в растр, описанный в следующем разделе,
иллюстрирует применение пошаговых методов.

23
4.2 ЦИФРОВОЙ ДИФФЕРЕНЦИАЛЬНЫЙ АНАЛИЗАТОР
Один из методов разложения отрезка в растр состоит в решении дифференциального
уравнения, описывающего этот процесс. Для прямой линии имеем
Решение представляется в виде
где x
1
,y
1
, и x
2
,y
2
— концы разлагаемого отрезка и у
i
— начальное значение для
очередного шага вдоль отрезка. Фактически уравнение (2.1) представляет собой рекуррентное
соотношение для последовательных значений y вдоль нужного отрезка. Этот метод, используемый
для разложения в растр отрезков, называется цифровым дифференциальным анализатором (ЦДА).
В простом ЦДА либо Δx, либо Δу (большее из приращений) выбирается в качестве единицы
растра. Ниже приводится п
ростой алгоритм, работающий во всех квадрантах:
Процедура разложения в растр отрезка по методу цифрового
дифференциального анализатора (ЦДА)
предполагается, что концы отрезка (x
1
,y
1
) и (x
2
,y
2
) не совпадают
Integer — функция преобразования вещественного числа в целое. Примечание: во многих
реализациях функция Integer означает взятие целой части, т. е. lnteger(—8.5) = —9, а не —8.В
алгоритме используется именно такая функция. Sign — функция, возвращающая —1, 0, 1 для
отрицательного, нулевого и положительного аргумента соответственно
аппроксимируем длину отрезка
if abs(x
2
– x
1
) >= abs(y
2
– y
1
) then
Длина = abs(x
2
– x
1
) else
Длина = abs(y
2
– y
1
)
end if
полагаем большее из приращений
Δ
x или
Δ
y равным единице раст-
ра
Δх = (x
2
– x
1
)/Длина
Δу = (y
2
– y
1
)/Длина
округляем величины, а не отбрасываем дробную часть использование знаковой функции
делает алгоритм пригодным для всех квадрантов
х = x
1
+ 0.5 * Sign(Δx)
у = y
1
+0.5 *Sign(Δy)
начало основного цикла
i = 1
while (i <= Длина)
Plot (lnteger(x), lnteger(y))
x = x +
Δ
х
у = у +
Δ
у
i = i +1 end while finish

24
4.2 АЛГОРИТМ БРЕЗЕНХЕМА
Хотя алгоритм Брезенхема был первоначально разработан для цифровых графопостроителей,
однако он в равной степени подходит и для использования растровыми устройствами с ЭЛТ.
Алгоритм выбирает оптимальные растровые координаты для представления отрезка. В процессе
работы одна из координат — либо X
, либо У (в зависимости от углового коэффициента) —
изменяется на единицу. Изменение другой координаты (либо на нуль, либо на единицу) зависит от
расстояния между действительным положением отрезка и ближайшими координатами сетки.
Такое расстояние мы назовем ошибкой.
Алгоритм построен так, что требуется проверять лишь знак этой ошибки. На рис. 4.2 это
иллюстрируется для отрезка в первом окт
анте, т. е. для отрезка с угловым коэффициентом,
лежащим в диапазоне от нуля до единицы. Из рисунка можно заметить, что если угловой
коэффициент отрезка из точки (0, 0) больше чем 1/2, то его пересечение с прямой X = 1 будет
расположено ближе к прямой Y = 1, чем к прямой Y = 0. Следовательно, точка растра (1,1) лучше
ап
проксимирует ход отрезка, чем точка (1, 0). Если угловой коэффициент меньше 1/2, то верно
обратное
Рисунок 4.2
Основная идея алгор
итма Брезенхема
Инициировать ошибку значением 1/2
Для углового коэффициента, равного 1/2, нет какого-либо предпочтительного выбора. В
данном случае алгоритм выбирает точку (1, 1). Не все отрезки проходят через точки растра.
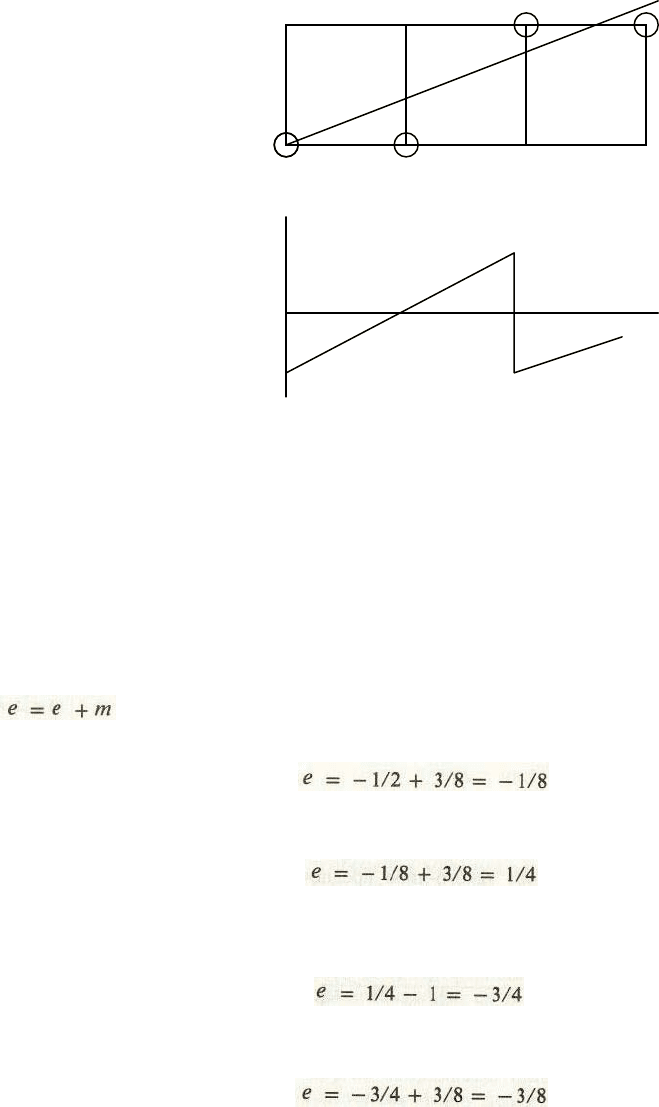
Подобная ситуация иллюстрируется рис. 4.3, где отрезок с тангенсом угла наклона 3/8 сначала
проходит через точку растра (0, 0) и последовательно пересекает три пикселя.
(0,1)
(1,0)(1,0)
(1,1)
x
y
ошибкаошибка
Δ
Δ
+=
)0(
2
1
/0
)0(1/
2
1
<<ΔΔ≤
≥≤ΔΔ≤
ошибкаxy
ошибкаxy
25
Рисунок 4.3 – График ошибки в алгоритме Брезенхема
Также иллюстрируется вычисление ошибки при представлении отрезка дискретными
пикселями. Так как желательно проверять только знак ошибки, то она первоначально устанав-
ливается равной — 1/2. Таким образом, если угловой коэффициент отрезка больше или равен
1/2, то величина ошибки в следующей точке растра с ко
ординатами (1, 0) может быть
вычислена как
где m — угловой коэффициент. В нашем случае при начальном значении ошибки —1/2
Так как е отрицательно, отрезок пройдет ниже середины пикселя. Следовательно, пиксель на том
же самом горизонтальном уровне лучше аппроксимирует положение отрезка, поэтому Y не увели-
чивается. Аналогично вычисляем ошибку
в следующей точке растра (2, 0). Теперь е положительно, а значит, отрезок пройдет выше средней
точки. Растровый элемент (2, 1) со следующей по величине координатой Y лучше аппроксимирует
положение отрезка. Следовательно, Y увеличивается на единицу. Прежде чем рассматривать
следующий пиксель, необходимо откорректировать ошибку вычитанием из нее единицы. Имеем
.
Заметим, что пересечение вертикальной прямой х = 2 с заданным отрезком лежит на 1/4 ниже
прямой У = 1. Если же перенести отрезок 1/2 вниз, мы получим как раз величину —3/4. Продол-
жение вычислений для следующего пикселя дает
Так как е отрицательно, то у не увеличивается. Из всего сказанного следует, что ошибка — это
интервал, отсекаемый по оси У рассматриваемым отрезком в каждом растровом элементе (относи-
тельно — 1/2).
Приведем алгоритм Брезенхема для первого октанта, т. е. для случая 0 <= Δу <= Δ
У.
1 0 2 3
1
1
0.5
0
0.5
1
26
3.1. Ал
горитм Брезенхема разложения в растр отрезка для первого октанта
предполагается, что концы отрезка (x
1
,y
1
) и (x
2
,y
2
) не совпадают
Integer — функция преобразования в целое
х, у, Δх, Δу — целые
е — вещественное
инициализация переменных
х = х
1
у =
У
1
Δх = x
2
– x
1
Δ
У = y
2
– y
1
инициализация е с поправкой на половину пиксела
е = Δу/Δх - 1/2
начало основного цикла
for i = 1 to Δх Plot (х, у)
while (е >= 0)
у = у + 1
е = е — 1
end while
X = X + 1
е = е + Δу/Δх
next i
finish

27
ЛЕКЦИЯ 5. РАЗЛОЖЕНИЕ ОКРУЖНОСТИ В РАСТР
ПО АЛГОРИТМУ БРЕЗЕНХЕМА
1
1
:1
Hii
ii
mxx
yy
+
+
=+
=
2
22
(1)
Hi i
mx yR=++−
1
1
:1
1
Dii
ii
mxx
yy
+
+
=+
=−
222
(1)(1)
Di i
mx y R=++−−
1
1
:
1
Vii
ii
mxx
yy
+
+
=
=−
I
II
Рисунок 5.1 В растр раскладывается
первый октант, а потом различным
образом отображается
ii
x
y
V
m
D
m
H
m
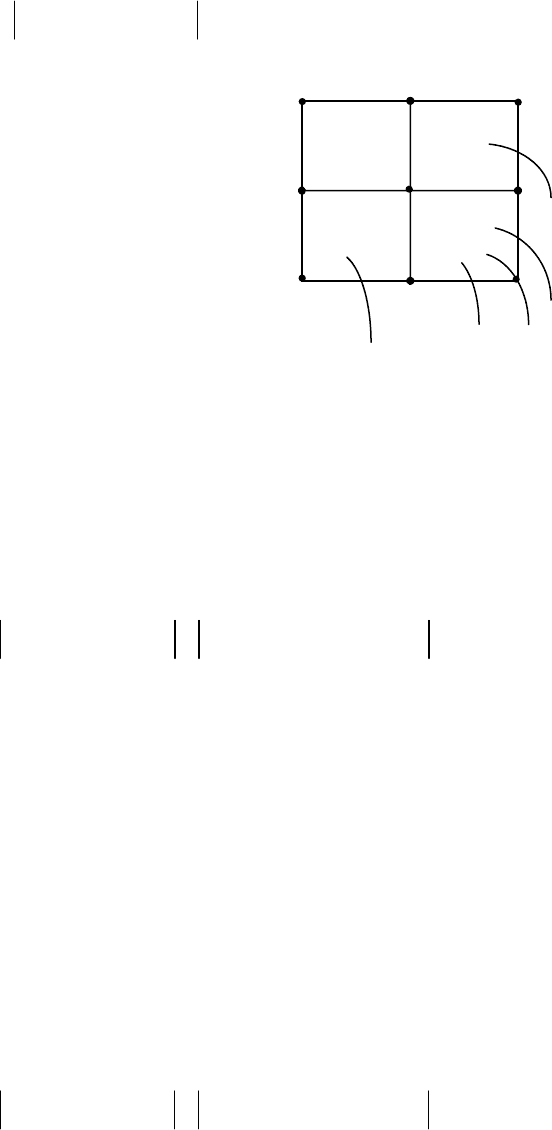
Рисунок 5.2 При построении
окружности возможен выбор трех
направлений – горизонтального,
вертикального и диагонального
mH,
mV, mD
28
2
22
((1)
Vii
mxy R=+−−
Рисунок 5.3 – Возможные варианты пересечения окружностью точек растра
222
(1)(1)
0(12.)
ii
ix y R
i
р
адиус большедиагональной точки ый и ой вар
Δ= + + − −
Δ< −
0
0
H
D
H
D
mm
m
m
δ
δ
δ
=−
<→
≥→
{
}
22
22 2 22
22
222 22
2
222
(1) (1)( 1)
(1) (1)( 1)
(2 1) 2( 1) 2( 1) 2 2 1
221
ii i i
ii i i
iii i
i
xyRx y R
xyRx y R
yxyRy
iy
δ
=++−−++ −−=
=++−+++ −−=
=± + = + + − − + −=
=Δ+ −
так для 1го случая
221
i
iy
δ
=
Δ+ −
0
H
D
H
mm
m
δ
δ
=−
<→
δ
= - для второго случая
0(34.)i
р
адиус большедиагональной точки ий и ый варΔ> −
'0
'0
dVD
V
D
R
mmm
m
m
δ
δ
δ
<=−
<→
≥→
3ий случай
22
22 2 22
(1) (1)( 1)
ii i i
x
yRx y R
δ
=+−−−++ −−
2
22 2 22
(1) (1)(1)
'2( )1
ii i i
i
x
yRx yR
ix
δ
δ
=− − − + − + + − −
=Δ− −
4ый случай
0
V
m
δ
<→
5ый случай
0
D
imΔ= →
ii
x
y
2
1
3
4
5
29
Рекуррентное отношение для
i
x
Δ
1
1
:1
Hii
ii
mxx
yy
+
+
=+
=
11
21
iii
x
++
Δ=Δ+ +
1
1
:1
1
Dii
ii
mxx
yy
+
+
=+
=−
111
222
iii i
xy
+++
Δ=Δ+ − +
1
1
:
1
Vii
ii
mxx
yy
+
+
=
=−
11
21
iii
y
++
Δ=Δ− +
30
Лекция 6. ПРОБЛЕМЫ УДАЛЕНИЯ НЕВИДИМЫХ ПОВЕРХНОСТЕЙ
Изученные алгоритмы построения на экране трехмерных объектов и выполнения их
геометрических преобразований позволяют создавать каркасные образы объектов. Следующим
этапом совершенствования изображения является удаление невидимых поверхностей. Задача эта
непроста и существует множество различных способов ее реализации. Для упрощения в
рассмотрение вносятся выпуклые тела, ограниченные плоскими гранями.
Задача удаления невидимых по
верхностей состоит в нахождении преобразования
отображающего множество объекта во множество видимых частей в двухмерном пространстве.
Объект определяется, как множество координат плюс множество отношений,
специфицирующих его топологию.
В формализованном виде алгоритмы удаления невидимых поверхностей (АУНП)
можно представить следующим образом:
АУНП = ( O, S, I, ϕ, σ ) ,
где O - множество объектов в трехмерном пространстве;
S
- множество видимых отрезков в двухмерном пространстве;
I - множество промежуточных представлений;
ϕ - множество функций перехода;
σ - функция стратегии.
ϕ = (PM, IS, CT, DT, VT),
где PM – преобразования проецирования (область определения – трехмерное пространство,
область значений - двухмерное;
IS - функции, позволяющие определить точки пересечения (области определения и
значений совпадают);
CT – тест принадлежности, позволяющий определить, принадлежит ли точка поверхности
(область определения и значений – дву
хмерное пространство); результат работы теста - истина
или ложь;
DT – тест глубины, сравнивающий две точки и определяющий, какая из них находится на
большей глубине, то есть дальше от наблюдателя;
VT – тест видимости или самозаслонения, определяющий невидимые грани объекта;
результат работы теста – истина или ложь.
Функция стратегии определяет порядок применения функций и тестов из мн
ожества ϕ.
6.1 Функции перехода
6.1.1 Перспективные преобразования (PM)
Перспективные преобразования применяются в АУНП либо до удаления невидимых
поверхностей либо после. Критерием является пространство, в котором работает сам
алгоритм. Если идея алгоритма такова, что определение невидимых поверхностей выполняется
в трехмерном пространстве, то проектирование выполняется после работы АУНП. Если
алг
оритм работает на плоскости с проекциями объектов, то естественно, что проецирование их
должно быть реализовано первым, а затем начинает работать АУНП.
6.1.2 Функции пересечений (IS)
В этом классе функций алгоритмы удаления невидимых поверхностей используют чаще всего
следующие элементы, для которых определяется пересечение:
- две прямые;
- два отрезка;
- прямая и пл
оскость.
Ниже приведены цели определения точек пересечения в АУНП: