Celletti A. Stability and Chaos in Celestial Mechanics
Подождите немного. Документ загружается.

4 1 Order and chaos
1.2 Linear stability
Let us consider the dynamical system described by the equation (1.1) with degrees
of freedom and let J be the Jacobian matrix defined as
J = J(x
) ≡ Df(x)=
⎛
⎜
⎝
∂f
1
∂x
1
...
∂f
1
∂x
.
.
.
.
.
.
∂f
∂x
1
...
∂f
∂x
⎞
⎟
⎠
.
In the proximity of an equilibrium position x
= x
0
we refer to
˙y
= J(x
0
)y ,y∈ R
, (1.6)
as the linearized system. Let
0
be the number of eigenvalues of J(x
0
) with zero
real part,
u
be the number of eigenvalues with positive real part and
s
those with
negative real part.
Definition. The equilibrium position x
= x
0
is called hyperbolic if
0
=0;itis
called an attractor if
s
= ,arepeller if
u
= and a saddle if
u
and
s
are both
strictly positive.
Near a hyperbolic equilibrium the dynamics of (1.1) is equivalent to that of the
linearized system (1.6) as stated by the following result [84,93]:
Hartman–Grobman theorem. Consider the dynamical system described by
(1.1) and assume that it admits a hyperbolic equilibrium position x
0
. In a suitable
neighborhood of x
0
the system (1.1) is topologically equivalent
1
to the linearized
system (1.6).
Let us now discuss the stability of an equilibrium position; we first introduce the
following definition of stability according to Lyapunov for a generic solution of the
system (1.1). To fix the notations, let ·denote the distance function, e.g. the
Euclidean norm in R
.
Definition. The solution x
∗
= x
∗
(t) is said to be stable according to Lyapunov, if
for any ε>0 there exists δ = δ(ε) such that if x
(t
0
) − x
∗
(t
0
) <δat the initial
time t = t
0
,thenx(t) − x
∗
(t) <εfor any t ≥ t
0
.
The solution is said to be asymptotically stable if, for x
(t
0
) −x
∗
(t
0
) <δ, one has
lim
t→∞
x(t) − x
∗
(t) =0.
When the solution coincides with an equilibrium point, its linear stability can be
inferred from the analysis of the eigenvalues of the Jacobian matrix; we denote by
(λ
1
,...,λ
) the roots of the characteristic equation det(J − λI
)=0(I
is the
× identity matrix) and we denote by v
j
∈ R
, j =1,...,, the eigenvector
associated to λ
j
. Then, the solution of the linearized system can be written in
the form y
(t)=
j=1
α
j
v
j
e
λ
j
t
for some real or complex coefficients α
j
which are
determined by the initial conditions.
Assuming for simplicity that = 2, the equilibrium is characterized as follows,
according to the nature of the eigenvalues λ
1
, λ
2
:
1
i.e., there exists a homeomorphism which conjugates (1.1) and (1.6).
1.2 Linear stability 5
– if λ
1
, λ
2
are real negative numbers, then the equilibrium is a stable node;
– if λ
1
, λ
2
are real positive numbers, then the equilibrium is an unstable node;
– if λ
1
, λ
2
are real numbers with opposite signs, then the equilibrium is a saddle;
– if λ
1
, λ
2
are complex numbers with negative real part, then the equilibrium is
a stable focus;
– if λ
1
, λ
2
are complex numbers with positive real part, then the equilibrium is
an unstable focus;
– if λ
1
, λ
2
are purely imaginary and non–zero, then the equilibrium is a center.
We next introduce the definitions of stable and unstable manifolds as well as those of
homoclinic and heteroclinic intersections (see, e.g., [80] for applications to Celestial
Mechanics). We denote by Φ
(t;˜x)theflow at time t with initial condition ˜x, namely
the solution at time t of (1.1) starting from x
=˜x.
Definition. Let x
0
be a saddle point and let Φ(t; x) be the flow at time t with
initial condition x
.Thestable manifold W
s
(x
0
) is the set of points which end–up
at x
0
, i.e.
W
s
(x
0
) ≡{x ∈ R
: lim
t→∞
Φ(t; x)=x
0
} .
Analogously, we define the unstable manifold W
u
(x
0
) as the set of points which
tend to x
0
for negative times, i.e.
W
u
(x
0
) ≡{x ∈ R
: lim
t→−∞
Φ(t; x)=x
0
} .
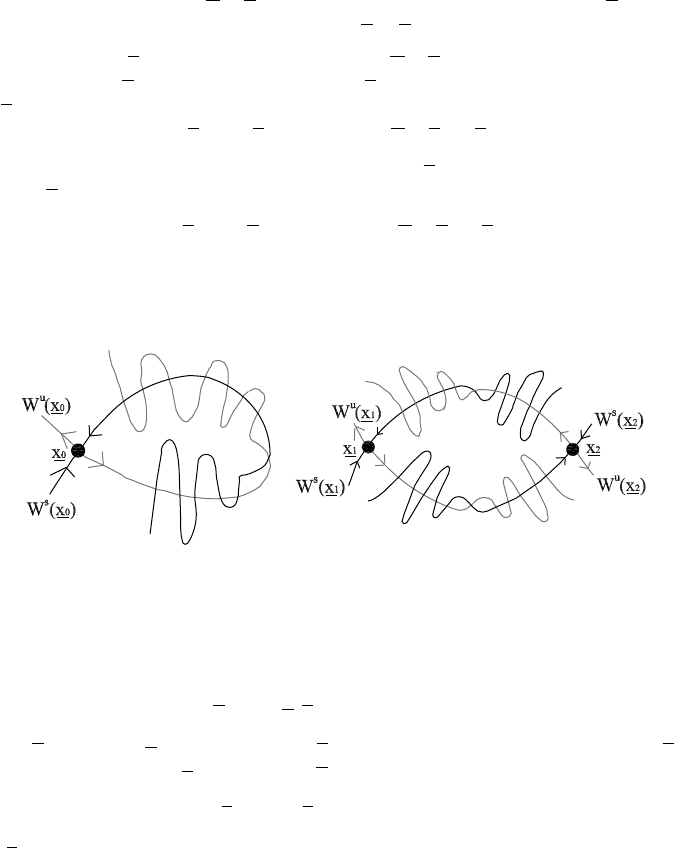
The intersection between W
s
and W
u
is called a homoclinic point; if W
s
and W
u
belong to different equilibrium positions, then the intersection is called a hetero-
clinic point (see Figure 1.2).
Fig. 1.2. Left: Stable and unstable manifolds of a homoclinic point. Right: An example
of heteroclinic intersections.
Let us briefly transpose the main definitions and results to discrete systems.
Consider the –dimensional mapping
x
n+1
= f(x
n
) ,n∈ N , (1.7)
where x
n
∈ R
and f =(f
1
,...,f
); let x
0
be a fixed point and denote by J ≡ J(x
0
)
the Jacobian matrix of f
computed at x
0
. The linearized system is written as
y
n+1
= Jy
n
,n∈ N ,
for y
n
∈ R
.
6 1 Order and chaos
Definition. Afixedpointx
0
of (1.7) is called hyperbolic, if the eigenvalues of
J = J(x
0
) are real and one of them has magnitude greater than one. A fixed point
x
0
is called elliptic, if the eigenvalues are complex with absolute value equal to one.
Afixedpointx
0
is an attractor if the eigenvalues have magnitude less than unity
and it is a repellor if the magnitude is greater than one.
If f
in (1.7) is defined on a space X with (X, d) being a metric space with
metric d : X ×X → R, then the definition of stability according to Lyapunov of a
fixed point x
0
transposes as follows.
Definition. For any ε>0, there exists δ = δ(ε) such that for any x
∈ X with
d(x
0
,x) <δ,thend(f
n
(x
0
),f
n
(x)) <εfor any n ∈ N. The fixed point is asymp-
totically stable if lim
n→∞
d(f
n
(x
0
),f
n
(x)) = 0 whenever d(x
0
,x) <δ.
Concerning the linear stability we proceed as follows. The general solution is a linear
combination of the form x
n
=
j=1
α
j
v
j
λ
n
j
for suitable coefficients α
j
, while v
j
denote the eigenvectors. If λ
j
, j =1,...,, are the eigenvalues associated to the
Jacobian J, then the fixed point is linearly stable if |λ
j
|≤1 for all j =1,..., and
it is linearly unstable if for some j it is |λ
j
| > 1.
1.3 Conservative and dissipative systems
Let us consider a continuous system described by the equations (1.1); qualitatively
we can say that the system is conservative, if the volume of the phase space is
preserved. The system is said to be dissipative if the volume contracts or expands
along the flow.
When the flow associated to the evolution of the system is interpreted as a trans-
formation from x
to y representing the solutions at times t
1
and t
2
,say
x
≡ x(t
1
) → y ≡ x(t
2
) , (1.8)
then the volume of the phase space, denoted by V , changes according to the formula
V
dy =
V
|det(J)| dx , (1.9)
where J is the Jacobian of the transformation (1.8) and det(J) is its determinant.
Writing (1.8) as y
= h(x) for a suitable vector function h, one obtains that J coin-
cides with the Jacobian of h
,sayJ = Dh(x). The dynamical system is conservative
if |det(J)| = 1, while it is contractive if |det(J)| < 1 and expansive whenever
|det(J)| > 1.
With reference to equation (1.1), let F
t
(x) ≡ Φ(t; x) be the flow at time t with
initial datum x
;since{F
t
(x)}
t∈R
is a solution of (1.1), by definition one has
d
dt
F
t
(x)=f(F
t
(x)) ;

1.4 The attractors and basins of attraction 7
differentiating with respect to x one obtains the variational equations
d
dt
DF
t
(x)=Df(F
t
(x)) · DF
t
(x) . (1.10)
Let J
t
≡ DF
t
(x)andA(t) ≡ Df(F
t
(x)); then,
˙
J
t
= A(t) J
t
. According to Liou-
ville’s formula [93], denoting by Tr(A) the trace of the matrix A, one has
d
dt
(det(J
t
)) = Tr(A(t)) · det(J
t
) , where det J
0
=1. (1.11)
From (1.11) one finds det(J
t
)=e
R
t
0
Tr(A(s)) ds
and the system is said to be dissi-
pative and contractive if the phase space volume decreases with time, namely if
Tr(A(t)) < 0 for any t>0. If we set y
= F
t
(x) in (1.9), we obtain J
t
= J,sothat
det(J
t
)=det(J). In particular, the system is conservative if det(J
t
)=1.
An example of a dissipative system is provided by the damped pendulum described
by the equation
¨x + c ˙x +sinx = b cos t,
where c is a positive real constant and b is a real constant. Let us write such
equation as the following system of three first–order differential equations:
˙x = y
˙y = −cy − sin x + b cos t
˙
t =1.
One readily obtains that
A(t)=
⎛
⎝
010
−cos x(t) −c −b sin t
000
⎞
⎠
with Tr(A(t)) = −c<0; the contraction rate is therefore represented by the
quantity
det(J
t
)=e
R
t
0
Tr(A(s))ds
= e
−ct
.
1.4 The attractors and basins of attraction
In the framework of dynamical systems theory a relevant concept is provided by
that of the attractor; qualitatively it is defined as the set toward which the dynam-
ical system evolves. A more precise definition is given as follows.
Definition. For a continuous flow Φ
: R×R
→ R
associated to (1.1), the ω–limit
set corresponding to the initial condition x
0
is defined as the set
ω(x
0
)={x ∈ R
: there exists a sequence {t
n
}→∞such that
Φ
(t
n
; x
0
) → x as n →∞}.
8 1 Order and chaos
For a mapping of the form (1.4), let {x,f(x),f
2
(x),...} be the orbit associated
to the initial position x
according to the dynamics generated by f .Theω–limit
set corresponding to the initial condition x
0
is given by the accumulation points
{f
n
(x
0
)}, namely
ω(x
0
)={x ∈ R
: there exists a sequence {n
k
}∈Z
(strictly increasing) such that f
n
k
(x
0
) → x as k →∞}.
An attractor is an ω–limit set which has the property to attract a set with non–zero
measure of initial values [146]. We can now give the following qualitative definition
of basin of attraction.
Definition. Consider a continuous or discrete system which admits an attractor;
the corresponding basin of attraction is composed by the set of initial conditions
which tend to the attractor as time goes on (for continuous systems) or as the
number of iterations increases (for discrete systems).
In other words, the basin of attraction is the closure of the set of initial points
whose trajectory approaches the attractor asymptotically. An attractor is said to
be chaotic, when it shows sensitivity to the choice of the initial conditions. More
precisely, let us suppose that we observe two trajectories, initially very close to
each other. Following their evolution with time, we speak of extreme sensitivity to
the initial conditions, if the distance between the two trajectories increases expo-
nentially with time. In such a case it is impossible to make a long–term prediction,
since small uncertainties in the initial conditions are greatly amplified in a relatively
short time.
There exist different techniques for computing the basins of attraction. The most
intuitive is to select a sample of random initial conditions and to let them evolve
until they reach the attractor. It may happen that such a procedure requires a very
long computational time; henceforth, alternative techniques have been developed
in order to compute the basins of attraction using faster algorithms. To provide an
example, we mention a simple method, which is based on the following recipe [81].
Select a pair of points, say (P
1
,P
2
), where P
1
is captured by the attractor, while
P
2
is observed to pass it. Having fixed a precision δ,letP
1
and P
2
evolve, checking
that their distance remains smaller than δ. Denote by P
(j)
1
, P
(j)
2
the iterated points
at step j; if their distance becomes greater than δ, select a new position coinciding
with the point on the middle between P
(j)
1
and P
(j)
2
,andletitreplaceP
(j)
1
or P
(j)
2
according to whether it evolves, or not, to the attractor. This procedure leads to
the delimiting of the boundary of the basin of attraction within the precision δ.
We remark that basin boundaries can be subject to bifurcations, called meta-
morphoses, as a system parameter passes through a critical value; in some cases,
such a transition can also take place between a smooth curve and a fractal bound-
ary [146].
1.5 The logistic map 9
1.5 The logistic map
The logistic map is described by the non–linear, one–dimensional equation
x
j+1
= rx
j
(1 − x
j
)forx
j
∈ [0, 1] , (1.12)
where r is a real positive parameter. This equation is associated to the logistic
continuous equation originally introduced by P.–F. Verhulst [170] as a model of
population growth:
dx
dt
= rx(1 − x) .
In the mapping (1.12), if x
0
is the initial population, then x
j
represents the pop-
ulation at the year j; the parameter r denotes a combined rate for starvation and
reproduction. The logistic map was widely investigated in [133]; despite its relative
simplicity, it provides a huge variety of complex behaviors. In particular, two ef-
fects will be determined which correspond to starvation and reproduction, with a
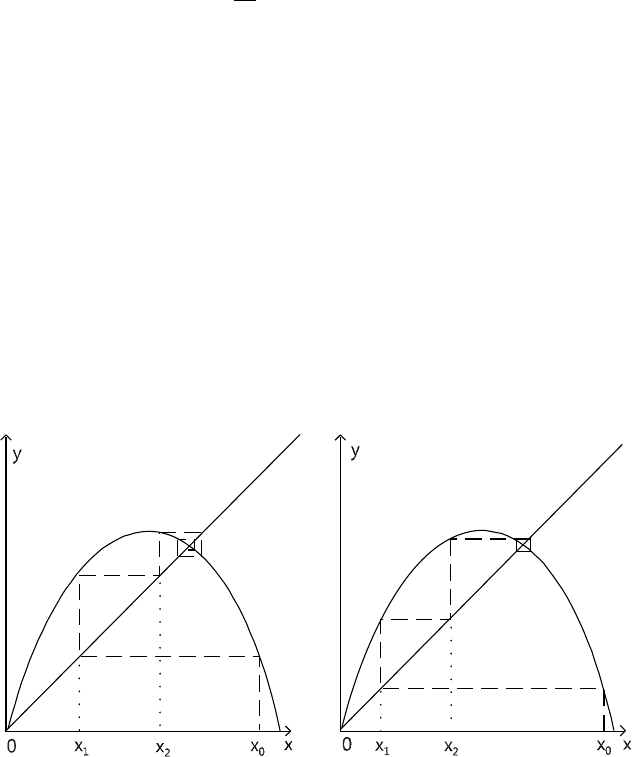
growth rate respectively decreasing and increasing. In order to provide a graphical
visualization of the iterations of the logistic map, one can proceed as described in
Figure 1.3: first, one draws the parabolic curve y = rx(1 − x) on the diagram x
versus y as well as the diagonal line x = y. From a given abscissa x
0
one computes
the point on the parabola, proceed to meet horizontally the diagonal line, com-
pute the point with the same abscissa on the parabola and continue iterating this
procedure. The behavior of the population strongly depends on the value of the
parameter r and on the initial condition x
0
; for example, in Figure 1.3(a) the dy-
namics is attracted toward a fixed point, while in Figure 1.3(b) the final trajectory
is a periodic orbit of period 2.
(a) (b)
Fig. 1.3. Graphical iteration of the logistic map (1.12). (a)Astablefixedpoint;(b)a
periodic orbit of period 2.
10 1 Order and chaos
We start by analyzing the logistic map for the specific value r = 4, namely
x
j+1
=4x
j
(1 − x
j
)withx
j
∈ [0, 1] .
For x
n
∈ [0, 1] define ξ
n
∈ [0, 1] through the change of variables
x
n
=sin
2
πξ
n
2
;
one obtains the equality sin
2
(
πξ
n+1
2
)=sin
2
(πξ
n
) which implies that ξ
n+1
= ±2ξ
n
+
k for k ≥ 0 integer. Since ξ
n
∈ [0, 1], there is a univocal choice for k which leads to
the definition of the following map:
ξ
n+1
=2ξ
n
for 0 ≤ ξ
n
<
1
2
ξ
n+1
=2− 2ξ
n
for
1
2
≤ ξ
n
≤ 1 . (1.13)
The mapping (1.13) is known as the tent map which can be written also as
ξ
n+1
=1− 2|ξ
n
−
1
2
|. Direct iterations of the mapping show that any initial con-
dition is subject to a stretching and folding process, thus providing an exponential
divergence of nearby orbits with the folding keeping the trajectory bounded. Due
to the extreme sensitivity to the choice of the initial conditions, the tent mapping
is shown to be chaotic.
Let us proceed with the analysis of the logistic map within the interval
0 <r<4. The equilibrium points are the solutions of the equation rx
j
(1−x
j
)=x
j
,
which provides the two points x
(0)
= 0 and x
(1)
=
r−1
r
. Denoting by f(x) ≡
rx(1 −x), since f
x
(0) = r one obtains that the origin is stable for 0 <r<1andit
is unstable when 1 <r<4. The point x
(1)
does not exist for 0 <r<1 (recall that
x belongs to the interval [0, 1]); due to the fact that f
x
(x
(1)
)=2−r one finds that
x
(1)
is stable for |2 − r| < 1, namely 1 <r<3, and it is unstable for 3 <r<4.
Within the interval 3 <r<4 the map shows a sequence of bifurcations with the
appearance of cycles of higher length. Two–cycles (namely oscillations between two
values) appear as far as r>3. In fact, the condition for two–cycles is
x
n+2
= rx
n+1
(1 − x
n+1
)=r[rx
n
(1 − x
n
)][1 − rx
n
(1 − x
n
)] = x
n
,
which is equivalent to
−r
3
x
3
n
− 2x
2
n
+
1+r
r
x
n
+
1 − r
2
r
3
=0.
Writing this equation as
−r
3
x
n
−
r − 1
r
x
2
n
−
r +1
r
x
n
+
r +1
r
2
=0,
we recognize that the quadratic equation admits real solutions provided r ≥ 3, from
which two–cycles appear as fixed points of the square of the mapping. This behavior
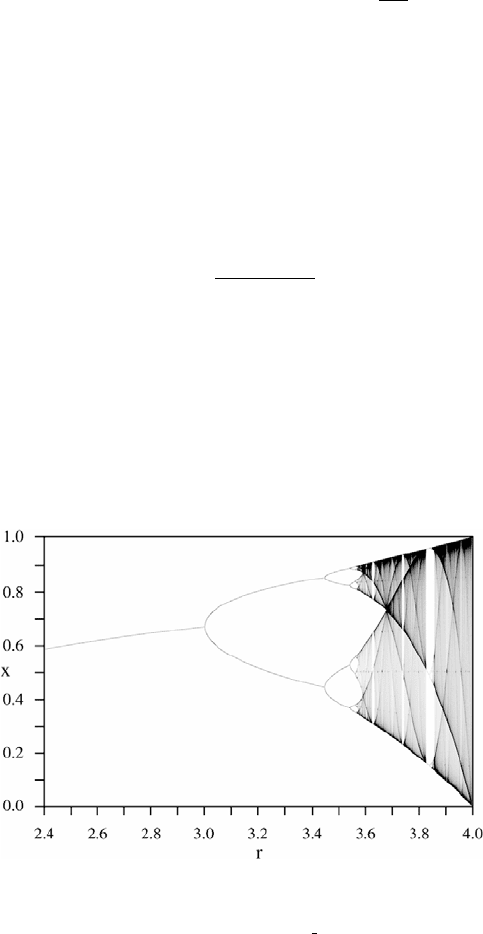
1.5 The logistic map 11
is described by the bifurcation diagram of Figure 1.4, which provides the change of
structure of the orbit, through a period–doubling bifurcation, as the parameter r
is varied.
The qualitative description of the results is the following (compare also with
Figure 1.4):
– if 0 <r<1 the origin is stable;
– if 1 <r<3 the dynamics admits the stable solution
r−1
r
;
– for 3 ≤ r<3.45 the dynamics may show an oscillation between 2 values;
– for 3.45 ≤ r<3.54 the dynamics may show an oscillation between 4 values;
– for 3.54 ≤ r<3.57 the dynamics may exhibit an oscillation between 8, 16,
32. . . values, showing a so–called period–doubling cascade;
– for 3.57 ≤ r<4 there is the onset of chaos with high sensitivity to changes in
the initial conditions; nevertheless for isolated values of the parameter, there
might be islands of stability.
If {r
j
} denotes the sequence of parameters at which successive period doublings
take place, then it can be shown that the sequence formed by the quantities
μ
j
≡
r
j+1
− r
j
r
j+2
− r
j+1
admits the limit
lim
j→∞
μ
j
=4.669201 ...
ThelastnumberiscalledtheFeigenbaum constant [65]; it provides the rate of
appearance of successive bifurcations as a universal behavior, since it is observed not
only for the logistic map, but also for a class of suitable dissipative one–dimensional
mappings undergoing a period–doubling cascade.
Fig. 1.4. Bifurcation diagram of the logistic map providing the period doubling of the
limit cycles as the parameter r is varied
(after http://en.wikipedia.org/wiki/File:LogisticMap
BifurcationDiagram.png).

12 1 Order and chaos
1.6 The standard map
One of the most popular mappings in the theory of Dynamical Systems is the so–
called standard map, which was introduced by B.V. Chirikov in [47]. It is defined
by the equations
y
= y + εf(x)
x
= x + y
, (1.14)
where y ∈ R, x ∈ T ≡ R/(2πZ), ε is a positive real parameter, called the perturbing
parameter, and f = f(x) is an analytic, periodic function. Notice that the mapping
can also be written using the following notation:
y
j+1
= y
j
+ εf(x
j
)
x
j+1
= x
j
+ y
j+1
for j ≥ 0 . (1.15)
The classical standard map is obtained setting f(x)=sinx:
y
= y + ε sin x
x
= x + y
.
We list below some properties of the standard map, referring to its formulation
(1.15).
(i) The mapping (1.15) is conservative, since the determinant of the corresponding
Jacobian is equal to one; in fact, setting f
x
(x
j
) ≡
∂f(x
j
)
∂x
, the determinant of
the Jacobian (1.15) is equal to
det
1 εf
x
(x
j
)
11+εf
x
(x
j
)
=1. (1.16)
(ii) For ε = 0 the mapping (1.15) reduces to
y
j+1
= y
j
x
j+1
= x
j
+ y
j+1
for j ≥ 0 . (1.17)
Therefore y
j
is constantly equal to the initial value y
0
, while we can write
x
j
= x
0
+ jy
0
for any j ≥ 0.
(iii) The fixed points of the standard map are obtained by solving the equations
y
j+1
= y
j
x
j+1
= x
j
;
from the first equation one has f(x
j
) = 0, while the second equation provides
y
j+1
=0=y
0
. For the classical standard map the fixed points are given by
the pairs (y
0
,x
0
)=(0, 0) and (y
0
,x
0
)=(0,π). The linear stability of such
points is investigated by computing the first variation, which can be written
as
δy
j+1
δx
j+1
= M
δy
j
δx
j
,

1.6 The standard map 13
where M denotes the matrix appearing in (1.16) computed at the fixed point.
The corresponding eigenvalues are determined by solving the characteristic
equation
λ
2
− (2 ± ε)λ +1=0,
where the positive sign holds for the fixed point (0, 0), while the negative sign
must be taken for (0,π). Since one eigenvalue associated to (0, 0) is greater
than one, the fixed point is unstable. For ε<4 the eigenvalues associated to
the point (0,π) are complex conjugate with real part less than one; therefore
the position (0,π)isstable.
We now describe the behavior of the mapping as ε varies. We have seen (item
(ii)above)thatforε = 0 the coordinate y
j
is held fixed, while x
j+1
= x
j
+ y
j
.In
particular, if the initial value of the y
j
variable is equal to a rational multiple of
2π, then the trajectory {(x
k
,y
k
)}, k ∈ Z
+
, is a periodic orbit. For example, let us
suppose that we start with the initial datum (y
0
,x
0
)=(
2
3
π, x
0
); then, the successive
iterations of the x coordinate are given by the following sequence: x
0
+
2
3
π, x
0
+
4
3
π,
x
0
+2π.Sincex
0
varies on the torus, after 3 iterations one gets back to the initial
point; in this case one speaks of a periodic orbit of period 3. In general, if y
0
=2π
p
q
with p, q positive integers (q = 0), one obtains a periodic orbit of period q.Itis
readily seen that the quantity p measures how many times the interval [0, 2π)is
run before coming back to the starting position.
The situation drastically changes when an irrational initial condition y
0
is taken
in place of a rational initial point. For ε =0they–value remains constant, while
one can show that when the number of iterations of the mapping is increased the
x–variable densely fills the line y = y
0
(Figure 1.5(a)). Such straight lines are quasi–
periodic invariant curves, since on these curves a quasi–periodic motion takes place
such that the dynamics comes indefinitely close to the initial conditions at regular
intervals of time, though never exactly retracing itself (as is the case for the periodic
orbits).
In order to distinguish between periodic orbits and quasi–periodic motions, one
can introduce the rotation number which is defined as the quantity (independent
of the initial condition)
ω ≡ lim
j→∞
x
j
− x
0
j
.
In the unperturbed case it is ω = y
0
,sinceforε = 0 equations (1.15) reduce to
y
j
= y
0
x
j
= x
0
+ jy
0
.
According to the value of the rotation number we distinguish between periodic and
quasi–periodic motions. Indeed, if ω =2π
p
q
with p, q integers (q = 0), then y
q
= y
0
and x
q
= x
0
+2πp = x
0
(modulus 2π)andthemotionisperiodic.If
ω
2π
is irrational,
the dynamics associated to (1.15) with ε = 0 is quasi–periodic.
In conclusion, for ε = 0 the system reduces to (1.17) and it is said to be inte-
grable, since the dynamics can be exactly solved: all motions are recognized as being
periodic or quasi–periodic. A non–integrable system occurs when it is not possible