Burton T. (et. al.) Wind energy Handbook
Подождите немного. Документ загружается.

_
ff
i1
¼
_
ff
i0
þ
€
ff
i0
h þ (
€
ff
i1
€
ff
i0
)h=2(5:82)
Equation (5.81) can be integrated twice to give an expression for the displacement
at the end of the time step, which, after rearrangement yields the following expres-
sion for the corresponding acceleration:
€
ff
i1
¼
6
h
2
( f
i1
f
i0
)
6
h
_
ff
i0
2
€
ff
i0
(5:83)
Substituting Equation (5.83) into Equation (5.82) yields
_
ff
i1
¼
3
h
( f
i1
f
i0
) 2
_
ff
i0
€
ff
i0
h=2(5:84)
Equation (5.70) can be written as
m
i
€
ff
in
þ c
i
_
ff
in
þ m
i
ø
2
i
f
in
¼
ð
R
0
i
(r)q
n
(r)dr ¼ Q
in
(5:85)
where the suffix n refers to the state at the end of the nth time step. Substituting
Equations (5.83) and (5.84) into Equation (5.85) with n ¼ 1 and collectin g terms
yields the displacement at the end of the first time step as:
f
i1
¼
Q
i1
þ m
i
6
h
2
f
i0
þ
6
h
_
ff
i0
þ 2
€
ff
i0
þ c
i
3
h
f
i0
þ 2
_
ff
i0
þ
h
2
€
ff
i0
m
i
ø
2
i
þ
3c
i
h
þ
6m
i
h
2
(5:86)
The velocity and acceleration at the end of the first time step are then obtained by
substituting f
i1
in Equations (5.84) and (5.83) resp ectively.
The full procedure for obtaining the blade dynamic response to a periodic
loading using the Newm ark ¼ 1=6 method (which is just one of many available)
may be summarized as follows:
(1) calculate the blade mode shapes,
i
(r);
(2) select the number of time steps, N, per complete revolution, then the time step,
h ¼ 2=N;
(3) calculate the blade element loads, q(r, ł
n
) ¼ q
n
(r), at blade azimuth positions
corresponding to each time step (i.e., at 2=N intervals) using momentum
theory (here, the suffix n denotes the number of the time step);
(4) calculate the generalized load with respect to each mode, Q
in
¼
Ð
R
0
i
(r)q
n
(r)dr,
for each time step;
(5) assume initial values of blade tip displacement, velocity and acceleration;
BLADE DYNAMIC RESPONSE 265
(6) calculate first mode blade tip displacement, velocity and acceleration at end of
first time step, using Equations (5.86), (5.84) and (5.83) respectively (with i ¼ 1);
(7) repeat Stage 6 for each successive time step over several revolutions until
convergence achieved;
(8) calculate cyclic blade moment variation at radii of interest by multiplying the
cyclic tip displacement variation by appropriate factors derived from the modal
analysis;
(9) repeat Stages 6–8 for higher modes;
(10) combine the responses from different modes to obtain the total response.
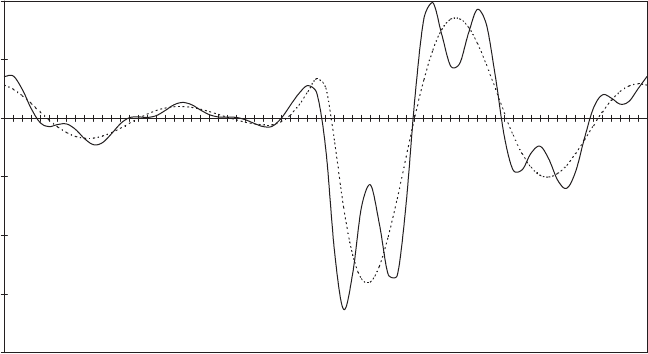
Figure 5.25 shows some results of the application of the above procedure to the
derivation of the out-of-plane root bending moment response of Blade TR to tower
shadow loading. The case chosen is for a mean wind speed of 12 m=s, uniform
across the rotor disc, and an x=D ratio of 1 (where x is the distance between the
blade and the tower centreline, and D is the tower diameter), giving a maximum
reduction in the blade root bending moment for a rigid blade of 70 kNm. Centrifu-
gal stiffening is included in the derivation of the mode shapes and frequencies, and
the damping ratios for the first and second modes are taken as 0.17 and 0.07
respectively. It is evident from Figure 5.25 that the tower shadow gives the blade a
sharp ‘kick’ away from the tower, but the duration is too short in relation to the
duration of the first mode half cycle for Blade TR to ‘feel’ the root bending moment
reduction that would be experienced by a completely rigid blade. The blade
-20
-15
-10
-5
0
5
10
360
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
360
Blade azimuth (Degrees)
Blade root bending moment relative to mean (kNm)
First mode
response
alone
First and second
mode
combined
response
Rotational speed = 30 r.p.m. = 0.5 Hz
First mode frequency = 1.78 Hz
Second mode frequency = 5.86 Hz
Rotor diameter = 40 m
Wind speed = 12 m/s
(uniform over disc)
Figure 5.25 Blade TR Out-of-plane Root Bending Moment Dynamic Response to Tower
Shadow
266
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
oscillations have largely died away after a complete revo lution because of the
relatively high levels of damping.
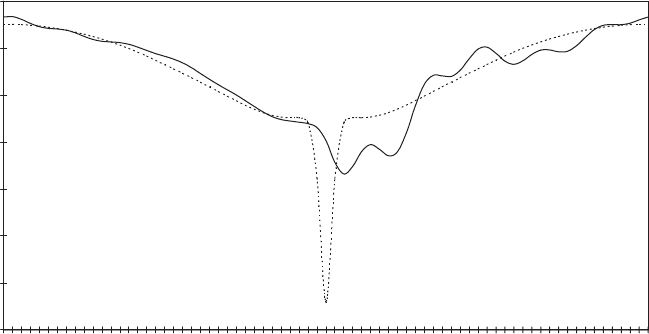
The response of the Blade TR out-of-plane root bending moment to tower shadow
combined with wind shear is shown in Figure 5.26 for a hub-height wind speed of
12 m/s. Also plotted is the corresponding bending moment for a compl etely rigid
blade. The wind shear loading is approximately sinusoidal (see Figure 5.11), and,
consequently, the response is also. However, it is worth noting that the amplitude
of the dominating first mode response to wind shear is the result of two effects
working against each other – in other words the increase due to the dynamic
magnification factor of about 9 percent is largely cancelled out by the reduction due
to centrifugal stiffening.
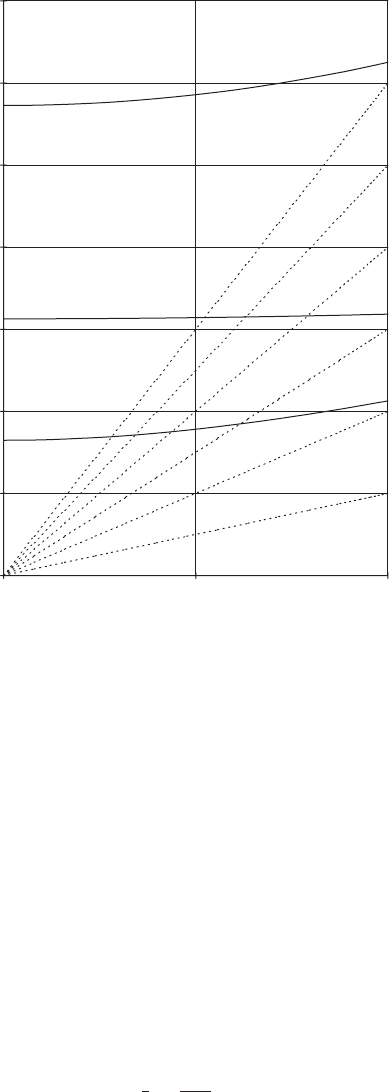
Avoidance of resonance: the Campbell diagram
In the course of blade design, it is important to avoid the occurrence of a resonant
condition, in which a blade natural frequency equates to the rotational frequency or
a harmonic with a significant forcing load. This is often done with the aid of a
Campbell diagram, in which the blade natural frequencies are plotted out against
rotational frequency together with rays from the origin representing integer multi-
ples of the rotational frequency. Then any intersections of the rays with a blade
natural frequency over the turbine rotational speed operating range represent
possible resonances. An example of a Campbell diagram is shown in Figure 5.27.
Clearly blade periodic loading is dominated by the loading at rotational fre-
quency from wind shear, yawed flow and shaft tilt (Section 5.7.2), gravity (Section
5.7.3) and gust slicing (Section 5.7.5). However, the short-lived load relief resulting
from tower shadow will be dominated by higher harmonics.
150
170
190
210
230
250
270
290
360
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
360
Blade azimuth
Blade root bending moment (kNm)
Root bending moment variation for
completely rigid blade
Blade TR root bending moment:
First and second mode
combined response
Rotational speed = 30 r.p.m.
Rotor diameter = 40 m
Hub-height wind speed = 12 m/s
Wind shear exponent = 0.2
Figure 5.26 Blade TR Out-of-plane Root Bending Moment Dynamic Response to Tower
Shadow and Wind Shear
BLADE DYNAMIC RESPONSE 267
5.8.6 Response to stochastic loads
The analysis of stochastic loads in the frequency domain has already been described
in Section 5.7.5 for a rigid blade, and this will now be extended to cover the
dynamic response of the different vibrati on modes of a flexible blade using the
governing equation, Equation (5.70). Note that the restriction to an unstalled blade
operating at a relatively high tip speed ratio still applies.
Power spectrum of generalized blade loading
The generalized fluctuating load with respect to the ith mode is Q
i
¼
Ð
R
0
i
(r)q(r)dr,
where
q(r) ¼
1
2
r
dC
l
dÆ
u(r, t)c(r)r (5:25)
0
1
2
3
4
5
6
7
03060
Rotational speed (r.p.m.)
Natural frequency (Hz)
First out-of-
plane mode
First in-plane mode
Second out-of-plane mode
1P
2P
3P
4P
5P
6P
Figure 5.27 Campbell Diagram for Blade TR
268
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES
Hence
Q
i
¼
1
2
r
dC
l
dÆ
ð
R
0
i
(r)u(r, t)c(r)dr (5:87)
An expression for the standard deviation of Q
i
,
Q
i
, can be derived by a method
analagous to that given in Section A5.4 of the Appendix for a non-rotating blade,
yielding
2
Q
i
¼
1
2
r
dC
l
dÆ
2
ð
R
0
ð
R
0
ð
1
0
S
o
u
(r
1
, r
2
, n)dn
i
(r
1
)
i
(r
2
)c(r
1
)c(r
2
)r
1
r
2
dr
1
dr
2
(5:88)
Here S
0
u
(r
1
, r
2
, n) is the rotationally sampled cross spectrum for a pair of points on
the rotating blade at radii r
1
and r
2
. Equation (5.88) is parallel to Equation (A5.16) in
the Appendix with r and r9 replaced by r
1
and r
2
and (rUC
F
)
2
replaced by
(
1
2
r(dC
l
)=(dÆ))
2
. From this it can be deduced that the power spectrum of the
generalized load with respect to the ith mode is
S
Q
i
(n) ¼
1
2
r
dC
l
dÆ
2
ð
R
0
ð
R
0
S
o
u
(r
1
, r
2
, n)
i
(r
1
)
i
(r
2
)c(r
1
)c(r
2
)r
1
r
2
dr
1
dr
2
(5:89)
In practice, this expression is evaluated using summations to approximate to the
integrals.
Power spectrum of tip deflection
The expression for the amplitude of the ith mode blade tip response in response to
excitation by a harmonically varying generalized load is given by Equation (A5.4)
in the Appendix. Hence the power spectrum of the tip displacement is related to
the power spectrum of the generalized load by
S
xi
(n) ¼
S
Q
i
(n)
k
2
i
1
[(1 n
2
=n
2
i
)
2
þ 4
2
i
n
2
=n
2
i
]
(5:90)
This can be written S
xi
(n) ¼ (S
Q
i
(n)=k
2
i
)[DMR]
2
where DMR stands for the dynamic
magnification ratio. n
i
is the ith mode natural frequency in Hz.
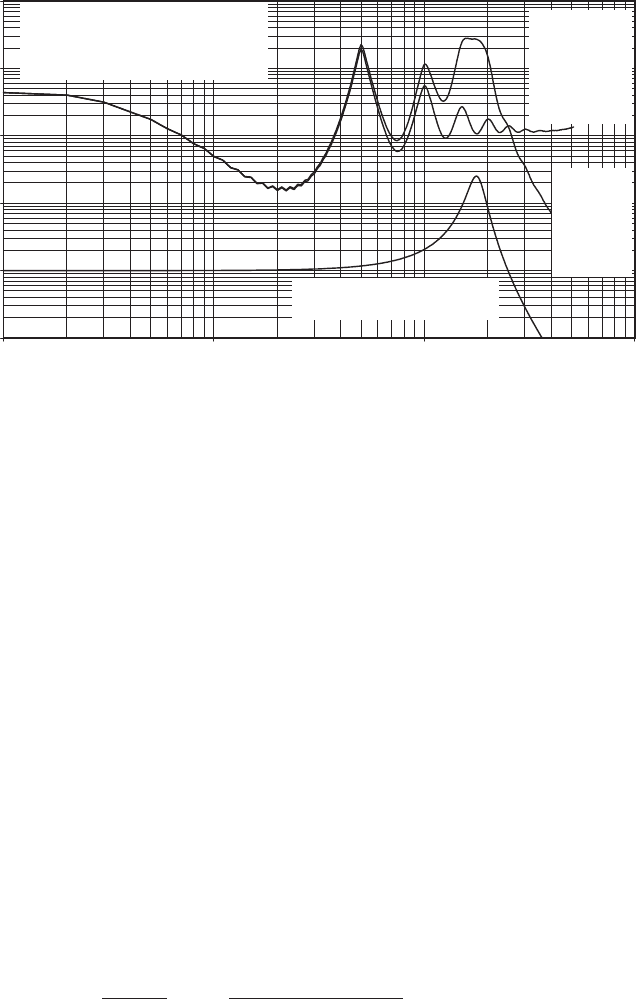
Figure 5.28 shows the power spectrum of first mode tip deflection, S
x1
(n), for
Blade TR operating at 30 r.p.m. in a mean wind of 8 m=s. A lower damping ratio of
0.1 has been selected so that the effect of dynamic magnification is emphasized and
the turbulence intensity has been arbitrarily set at 12.5% so that
u
¼ 1m=s. Also
shown is the first mode tip deflection spectrum ignoring dynamic magnification,
S
Q1
(n)=k
2
i
, which, when multiplied by the squa re of the dynamic magnification ratio
(also plotted), yields the S
x1
(n) curve. The standard deviation of first mode tip
deflection,
x1
¼
Ð
1
0
S
x1
(n)dn, comes to 54 mm, a 24 percent increase compared
with the value without dynamic magnification. The former is at a minimum,
BLADE DYNAMIC RESPONSE 269
because the blade TR first mode natural frequency of 1.78 Hz is approximately
midway between the third and fourth harmonics of the rotational frequency. How-
ever, it is found that, even if the first mode natural frequency coincided with the
third harmonic of the rotational frequency,
x1
would only increase by 4 percent.
This increase is small, because the peak of S
x1
(n) at the third harmonic is not very
pronounced, and because the peak in the dynamic magnification ratio is relatively
broad.
Power spectrum of blade root bending moment
If the amplitude of tip deflection due to excitation of the blade resonant frequency
is defined as x
R
(n
1
), the amplitude of the corresponding blade root bending
moment, M
Y
(n
1
) is given by
M
Y
(n
1
) ¼ ø
2
1
x
R
(n
1
)
ð
R
0
m(r)
1
(r)r dr (5:91a)
Noting that ø
2
1
¼ k
1
=m
1
, this becomes
M
Y
(n
1
)
x
R
(n
1
)
¼ k
1
R
ð
R
0
m(r)
1
(r)(r=R)dr
m
1
¼ k
1
R
M1
(5:91b)
This relationship applies at all exciting frequencies, because the right-hand side is
essentially a function of mode shape. Hence the power spectrum of blade root
bending moment due to excitation of the first mode is given by
0.1
1
10
100
1000
10000
0.01 0.1 1 10
Frequency, (Hz logarithmic scale)
nS
y1
(n) (logarithmic scale)
Power spectrum
of tip deflection
ignoring dynamic
magnification
(proportional to
spectrum of
generalized load)
Power
spectrum of
tip deflection
including
dynamic
magnification
Speed of rotation = 30 r.p.m. = 0.5 Hz
Mean wind speed = 8 m/s
Turbulence intensity = 12.5%
Integral length scale, L =73.5 m
First mode natural frequency = 1.78 Hz
Dynamic magnification ratio squared
based on damping ratio 0.1
Figure 5.28 Power Spectrum of Blade TR First Out-of-plane Mode Tip Deflection
270
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES

S
My1
(n) ¼ (k
1
R
M1
)
2
S
x1
(n) ¼ (R
M1
)
2
S
Q1
(n)
1
[(1 n
2
=n
2
1
)
2
þ 4
2
1
n
2
=n
2
1
]
(5:91c)
For Blade TR, the ratio
M1
takes a value of 1.4.
5.8.7 Response to simulated loads
The blade dynamic response to time varying loading derived from wind simulation
(Section 5.7.6) can be obtained by a step-by-step dynam ic analysis such as that
described for use with deterministic loads in Section 5.8.5. The procedure is
essentially the same, except that it is more important to select realistic values for the
initial blade tip displacement, velocity and acceleration, unless the results from the
first few rotation cycles are to be discarded.
5.8.8 Teeter motion
When the rotor is rigidly mounted on the shaft, out-of-plane aerodynamic loads on
the blades result in fluctuating bending moments in the low speed shaft additional
to those due to gravity. In the case of two bladed machines, the transfer of blade
out-of-plane aerodynamic moments to the shaft can be eliminated and blade root
bending moments reduced by mounting the rotor on a hinge with its axis perpendi-
cular to both the low speed shaft and the axis of the rotor. This allows the rotor to
teeter to and fro in response to differential aerodynamic loads on each blade.
The restoring moment is generated by the lateral components of the centrifugal
force acting on each blade element (see Figure 5.29). It is given by
M
R
¼
ð
R
0
r:m(r)
2
r: dr ¼ I
2
(5:92)
where is the teeter angle and I is the rotor moment of inertia about its centre. The
equation of motion for free teeter oscillations is thus I
€
þ I
2
¼ 0 (omitting the
aerodynamic damping term for the moment), indicating that the natural frequency
of the teeter motion with the teeter hinge perpendicular to the rotor axis is equal to
the rotational frequency. Since both the deterministic and stochastic components of
the exciting moment are dominated by this frequency, it is clear that the system
operates at resonance, with aerodynamic damping alone controlling the magnitude
of the teeter excursion.
The magnitude of teeter excursions would clearly be reduced if the teeter natural
frequency were moved away from the rotational frequency. This can be done by
rotating the teeter hinge axis relative to the rotor in the plane of rotation, as
illustrated in Figure 5.29, so that teeter motion results in a change of blade pitch –
positive in one blade and negative in the other – known as Delta 3 coupling.
Consider the case of blade A slicing through a gust. The increased thrust on the
blade will cause it to move in the downwind direction, by rotating about the teeter
BLADE DYNAMIC RESPONSE 271
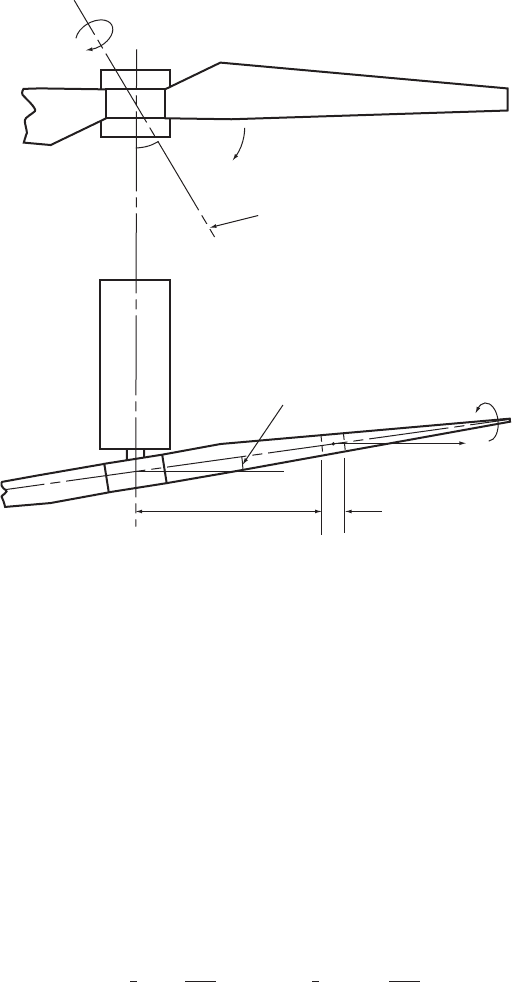
hinge. If the teeter angle, defined as the rotation of the blade in its own radial plane,
is , then the increase in blade A’s pitch angle will be tan
3
, where
3
is as defined
in Figure 5.29. The increase in the pitch angle of blade A will reduce the angle of
attack, Æ, and thereby reduce the thr ust loading on it. The net result of this and a
simultaneous increase in the thrust loading on blade B is to introduce a restoring
moment augmenting that provided by centrifugal force.
The first stage for the exploration of teeter response to different loadings is the
derivation of the complete equation of motion. It is assumed that the blades are
unstalled and are operating at a relatively high tip speed, so that the linear relations
adopted in the derivation of Equation (5.25) in Section 5.7.5 can be retained. The
various contributions to the change in the aerodynamic force on a blade element
relative to the steady-state situation are therefore:
1
2
rrc
dC
l
dÆ
(u
_
r)
1
2
r(r)
2
c
dC
l
dÆ
˜Ł (5:93)
where the three terms result from the fluctuation of the incident wind, teeter motion
and Delta 3 coupling respec tively. Multiplication of these terms by radius, integra-
tion over the length of the blade and addition of the centrifugal and inertia hub
moment terms yields the following equation of motion for the teeter response:
Blade A
Teeter rotation
Axis of teeter hinge
Teeter angle ζ
Centrifugal force
Change in pitch angle
M(r)Ω
2
r∆r
∆β = ζ tan δ
3
∆r
r
Ω
δ
3
Figure 5.29 Teeter Geometry
272
DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES

I
€
þ
1
2
r
dC
l
dÆ
ð
R
R
r
3
c(r)dr
"#
_
þ
1
2
r
dC
l
dÆ
ð
R
R
r
3
c(r)dr
"#
(tan
3
) þ I
2
¼
1
2
r
dC
l
dÆ
ð
R
R
u(r, t)c(r)rjrjdr (5:94)
assuming a frozen wake. By dividing through by the moment of inertia and writing
¼
1
2
r
I
dC
l
dÆ
ð
R
R
r
3
c(r)dr
"#
(5:95)
this can be simplified to
€
þ
_
þ (1 þ tan
3
)
2
¼
1
2
r
I
dC
l
dÆ
ð
R
R
u(r, t)c(r)rjrjdr (5:96)
is a measure of the ratio of aerodynamic to inertial forces acting on the blade, and
is one eighth of the Lock number.
Delta 3 coupling thus raises the natural frequency, ø
n
, of the teeter motion from
to
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 þ tan
3
p
. For a 40 m diameter rotor consisting of two TR blades
mounted on a teeter hinge set at a
3
angle of 308, ¼ 0:888 and tan
3
¼ 0:577, so
the increase in natural frequency due to the
3
angle is 23 percent. The correspond-
ing damping ratio, given by ¼ (=2)
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 þ tan
3
p
is quite high at 0.36.
Teeter response to deterministic loads
The teeter response to deterministic loads can be found usin g the same step-by-step
integration procedure set out in Section 5.8.5. However, as the loadings due to wind
shear and yaw are both approximately sinusoidal, an estimate of the max imum
teeter angle for these cases may be obtained by using the standard solution for
forced oscillations. For a harmonically varyi ng teeter moment, M
T
¼ M
T 0
cos t
due to wind shear, the teeter angle is given by
¼
M
TO
Iø
n
cos (t W)
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
(1 (=ø
n
)
2
)
2
þ (2=ø
n
)
2
p
(5:97)
where W ¼ tan
1
((2=ø
n
)=(1 (=ø
n
)
2
)) ¼ 908
3
is the phase lag with respect
to the excitation.
For the two-bladed turbine described above, rotating at 30 r.p.m. in a wind with a
hub-height mean of 12 m=s and a shear exponent of 0.2, the teeter moment
amplitude, M
o
, is approximately 50 kNm (see Figure 5.11, which gives the blade
root bending moment variation with azimuth for a fixed hub machine, based on
momentum theory). Taking the rotor moment of inertia as 307 000 kg m
2
for TR
blades, and ø
n
¼ 1:23 rad=s, the maximum teeter angle comes to 0:98 for
3
¼ 308.
This increases by about 16 percent to 1:058 if the
3
angle is reduced to zero.
BLADE DYNAMIC RESPONSE 273

If the wind speed variation due to wind shear is assumed to be linear with height,
i.e., u ¼ U(kr=R), and the teeter moment is calculated from the expression on the
right-hand side of Equation (5.94), which assumes a frozen wake instead of the
equilibrium wake resulting from momentum theory, a very simple expression for
the teeter angle results in the case of zero
3
angle. The teeter moment becomes
M
T
¼ M
TO
cos t ¼
1
2
r
dC
l
dÆ
Uk
R
ð
R
R
c(r)r
3
dr cos t (5:98)
Substitution of Equation (5.98) in Equation (5.97), with ø
n
set equal to for the case
of a zero
3
angle, results in the following expression for the teeter angle
¼
Uk
R
cos(t = 2)) (5:99)
Thus the teeter response lags the excitation by 908 and the magnitude of the teeter
excursion is simply equal to the v elocity gradient divided by the rotational speed.
For a hub height of 35 m, the equivalent uniform velocity gradient over the rotor
disc for the case above is 0:125
U=R ¼ 0:075 m=s per m, giving a teeter excursion of
0.024 radians or 1:48. This differs from the earlier value of 1:05 8 because of the
frozen wake assump tion.
Teeter response to stochastic loads
As usual, it is convenient to analyse the response to the stochastic loads in the
frequency domain. The teeter moment providing excitation is given by the right-
hand side of Equation (5.94). By following a similar method to that used for the
generalized load in Section 5.8.6, the following expression for the power spectrum
of the teeter moment can be derived:
S
MT
(n) ¼
1
2
r
dC
l
dÆ
2
ð
R
R
ð
R
R
S
o
u
(r
1
, r
2
, n)c(r
1
)c(r
2
)r
1
r
2
jr
1
jjr
2
jdr
1
dr
2
(5:100)
where S
o
u
(r
1
, r
2
, n) is the rotationally sampled cross spectrum. In practice,
S
o
u
(r
1
, r
2
, n) is evaluated for a few discrete radius values, and the inte grals replaced
by summations.
The power spectrum of the teeter angle response is related to the teeter moment
power spectrum by a formula analagous to Equation (5.90), as follows:
S
(n) ¼
S
MT
(n)
(Iø
2
n
)
2
1
[(1 2n=ø
n
)
2
)
2
þ (2:2n=ø
n
)
2
]
(5:101)
This can be written S
(n) ¼ (S
MT
(n)=(Iø
2
n
)
2
)[DMR]
2
where DMR stands for the
dynamic magnification ratio.
Figure 5.30 shows the teeter angle power spectrum, S
(n), for a two-bladed rotor
274 DESIGN LOADS FOR HORIZONTAL-AXIS WIND TURBINES