Bryan L. Programmable controllers. Theory and implementation
Подождите немного. Документ загружается.

699
CHAPTER
15
Process Controllers
and Loop Tuning
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CLOSED-LOOP PROPORTIONAL CONTROL
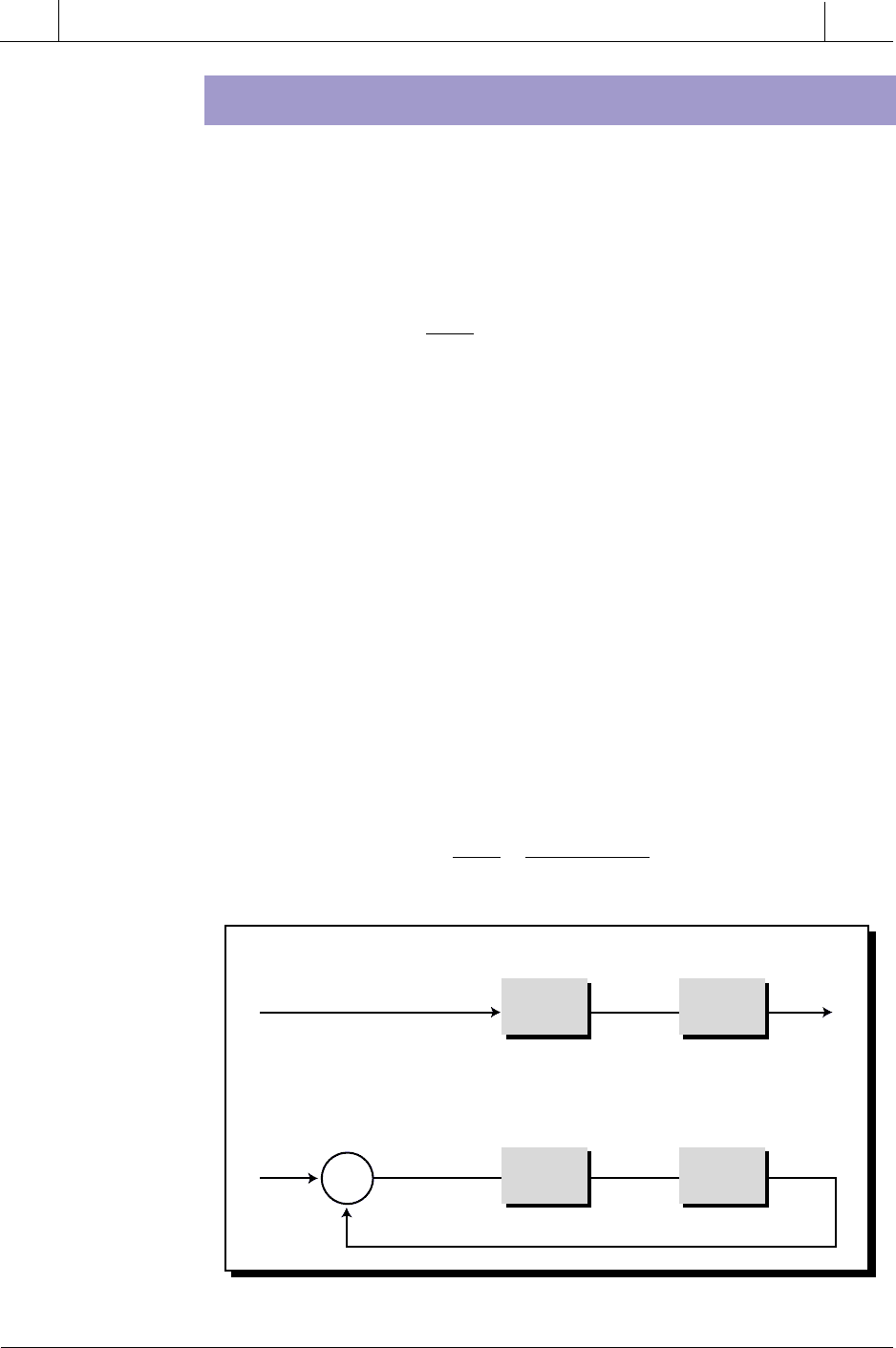
Figure 15-31a illustrates a typical open-loop process control system where
the process variable and transfer function in Laplace form are represented by
the equation:
PV SP Hc Hp
PV
SP
Hc Hp
ssss
s
s
ss
() () () ()
()
()
() ()
=
()( )( )
=
Figure 15-31b shows this same system in a closed-loop configuration. For
the closed-loop system, the process variable is defined by:
PV E Hc Hp
ssss() () () ()
=
()( )( )
Replacing E
(s)
with SP
(s)
– PV
(s)
yields:
PV SP PV Hc Hp
PV SP Hc Hp PV Hc Hp
PV Hc Hp SP Hc Hp
sssss
ssss sss
ssssss
() () () () ()
() () () () () () ()
() () () () () ()
=−
()
=
()
−
()
+
()
=1
Solving for PV
(s)
over SP
(s)
yields the closed-loop transfer function of this
process control system:
PV
SP
Hc Hp
Hc Hp
s
s
ss
ss
()
()
() ()
() ()
=
+1
Figure 15-31. (a) Open-loop and (b) closed-loop process control systems.
HpHc
HpHc
E
=
SP
–
PV PVSP
PV
SP
–
+
Σ
(b) Closed-loop system
(a) Open-loop system
700
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
15
Process Controllers
and Loop Tuning
The term Hc
(s)
represents the controller’s transfer function, while the term
Hp
(s)
represents the process’s transfer function. The process’s transfer func-
tion may take the form of a first-order response or a second-order response
(overdamped, underdamped, or critically damped). As we will discuss later,
the ideal controller transfer function for a system with a second-order
process plus lag and dead time is one with proportional, integral, and
derivative (PID) components.
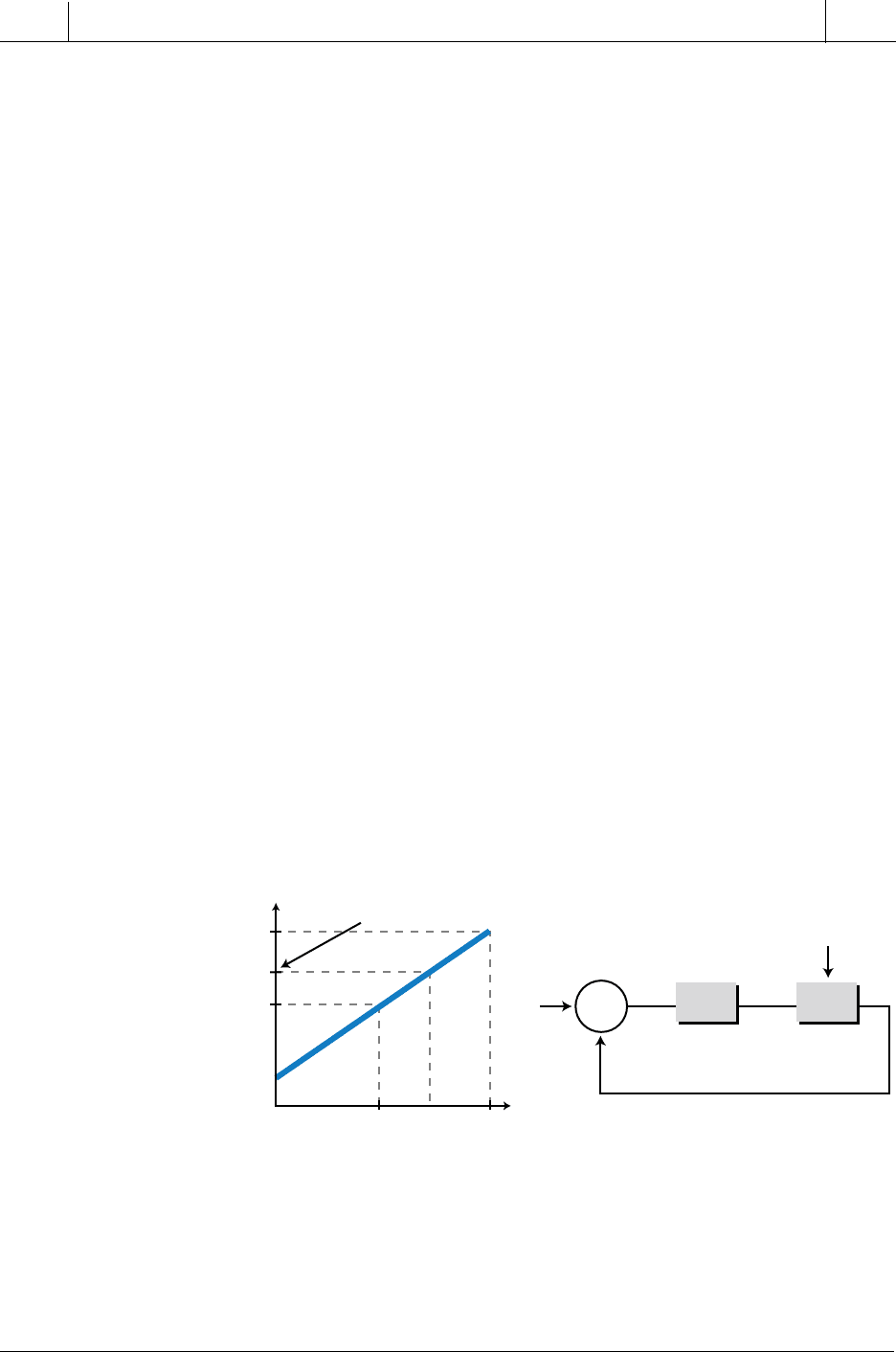
A closed-loop system’s response to a proportional controller creates an error
that cannot be eliminated. This error is referred to as offset. Figure 15-32
shows the graph of a proportional controller’s transfer function, in which a
50% CV output keeps the process variable at the set point. If a load
disturbance occurs, the error will increase and the controller will change the
output variable to try to bring the error back to zero. However, if the load
disturbance requires a permanent output change in the controller (CV
new
), the
one-to-one relationship between the controller and error will prohibit a zero
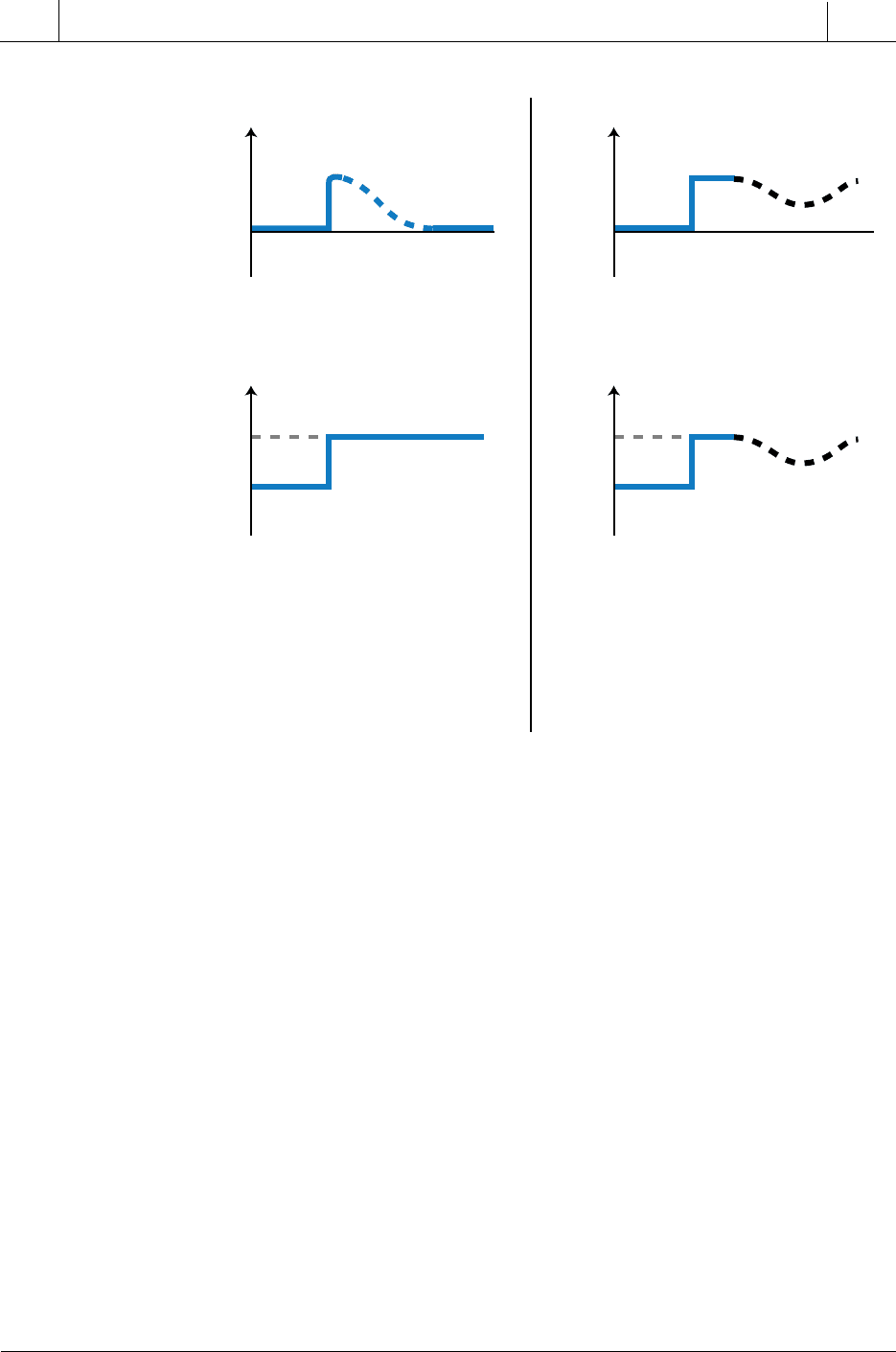
error value, because the original function curve is changed. For instance, if
the process variable in Figure 15-33a increases due to a load disturbance,
the control variable (assuming a direct-acting controller) will increase pro-
portionally to try to bring the error back to zero. If the load disturbance causes
a permanent change in the required controller output, the new output level
(CV
new
) will cause the process variable to return to the set point value.
However, as PV begins to approach the set point (see Figure 15-33b), the
controller will reduce its output because the error is diminishing. The reduced
CV output will cause the error to increase, because the process requires a
control variable output at the level of CV
new
to maintain the process variable
at the set point. Thus, error will always be present in the system.
100%
50%
0%
CV
new
%
CV
PV
min
PV
max
SP
=
PV
Change in output due
to load disturbance
Hc
EP
V
CV
PV
SP
+
–
Σ
Load
Disturbance
Hp
Figure 15-32. An offset caused by a load disturbance in a closed-loop system.
In process applications, the need for a permanent change in CV is typical,
thus proportional controllers always produce a small amount of error. This
error limits the use of proportional controllers to applications that include a
701
CHAPTER
15
Process Controllers
and Loop Tuning
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
manual reset, allowing the operator to change the bias, or operating point, of
the controller. This changes the level of controller output associated with
E = 0 from CV to CV
new
. Another way to minimize the system error is to
increase the gain, K
P
, thus reducing the proportional band. This method is
precarious, however, because too much gain will make the system oscillate
like an ON/OFF controller with a small deadband. The reason for this is that
if a small error occurs around the set point, the controller will have a large
output swing (CV) to correct for the process variable (PV). This will push the
error in the opposite direction. When the error goes the opposite direction of
the set point, the controller will quickly respond with another large output
change, thus forcing the process variable to return to its original direction.
Hence, the system will behave like an ON/OFF system if the proportional gain
is too large.
The following example illustrates the effect of error in a proportional
controller controlling a first-order system. Note that the step change in set
point is permanent, simulating a permanent disturbance or change.
Figure 15-33. (a) Desired response of a proportional controller to a load disturbance and
(b) its actual response.
SP
PV
(b)
CV
CV
new
SP
PV
(a)
CV
50% 50%
CV
new
A load disturbance causes
PV
to deviate from the set point.
A load disturbance causes
PV
to deviate from the set point.
The controller increases the control
variable to
CV
new
to compensate for
the disturbance. The increase to
CV
new
causes a decrease in the value of
PV,
instigating a decrease in the control
variable. The decrease in the control
variable causes the process variable
to increase again.
The controller increases the
control variable to
CV
new
to
compensate for the disturbance,
bringing the error to zero.
702
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
15
Process Controllers
and Loop Tuning
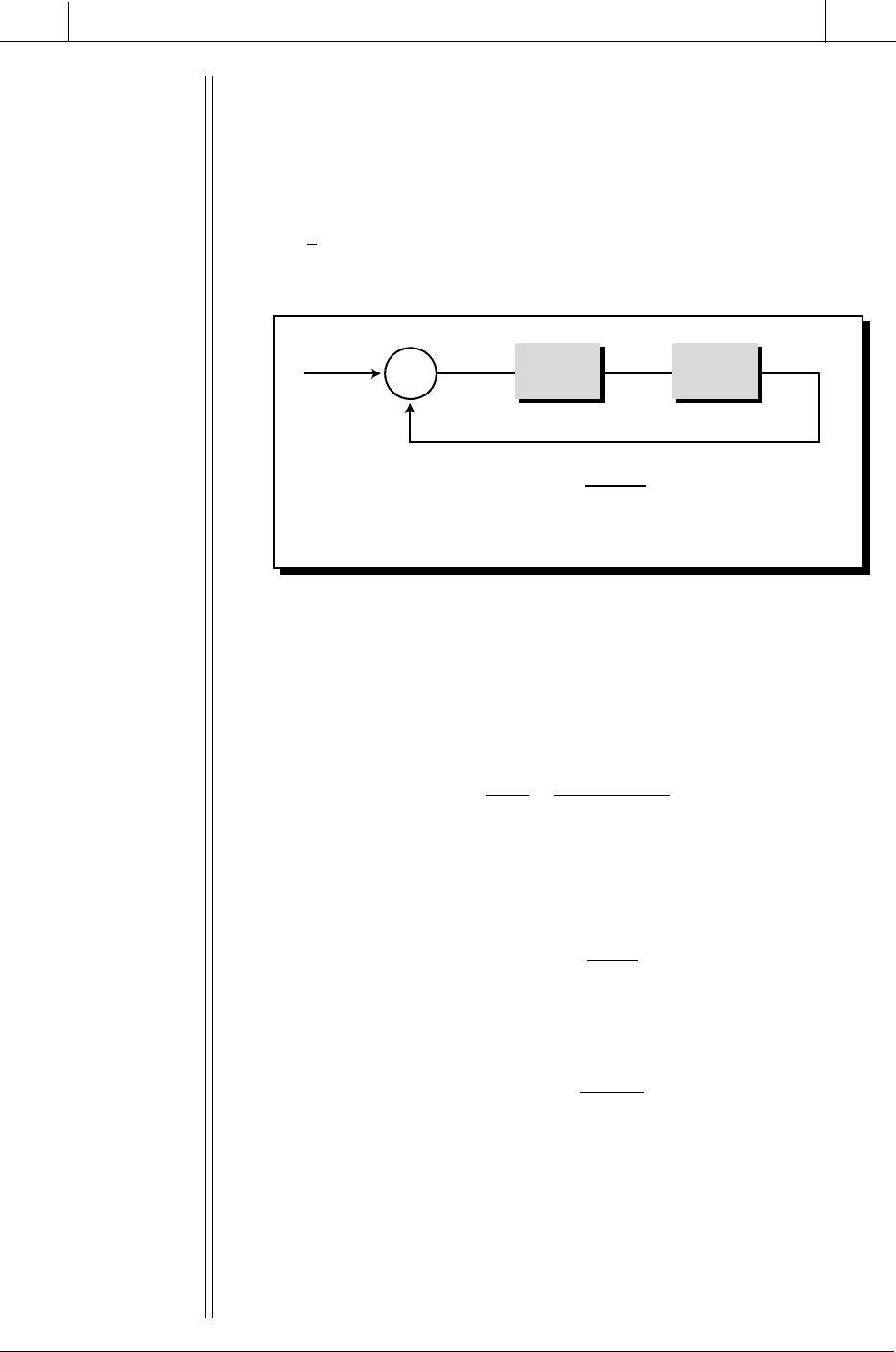
EXAMPLE 15-5
The closed-loop system shown in Figure 15-34 has a first-order
process (
Hp
) with a gain of 5 and a time constant of τ = 30 seconds.
The proportional controller (
Hc
) has a proportional gain of 8. (a) Find
the closed-loop transfer function, (b) calculate the response to a unit
step
1
s
, and (c) plot the response, indicating the system time constant
(
τ
sys
)
and the steady-state value.
Figure 15-34. Closed-loop system.
SOLUTION
(a) The transfer function of a closed-loop system is expressed as:
PV
SP
Hc Hp
Hc Hp
s
s
ss
ss
()
()
() ()
() ()
=
+1
As discussed in Chapter 14, the Laplace transfer function of a first-
order process with lag is:
Hp
A
s
s
()
=
+
τ
1
So the process’s transfer function is:
Hp
s
s
()
=
+
5
30 1
A proportional controller’s Laplace transfer function is simply the value
of its gain, so:
Hc
s
()
=8
Therefore, the closed-loop transfer function of the entire system is:
HpHc
EPVSP
–
+
Σ
Hp
(
s
)
=
Hc
(
s
)
= 8
5
30
s
+ 1
703
CHAPTER
15
Process Controllers
and Loop Tuning
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
PV
SP
s
s
s
s
s
s
s
s
s
s
s
()
()
=
(
)
(
)
(
)
(
)
[]
+
=
(
)
+
(
)
=
(
)
(
)
=
++
=
+
+
+
+
+
+
++
+
8
81
1
40
40 30 1
40
30 41
5
30 1
5
30 1
40
30 1
40
30 1
40
30 1
40 30 1
30 1
This transfer function indicates that this is a first-order system. To
express it in the form of a first-order system, we must divide the
numerator and denominator by 41 to obtain:
PV
SP
s
s
s
s
()
()
.
.
=
(
)
+
(
)
=
+
40
41
30
41
41
41
0 976
0 732 1
(b) The response to a unit step change in the set point is given by:
SP
s
s
()
()=
1
unit step
Therefore, using the previous equation, the process variable response
will be:
PV SP
s
ss
() ()
.
.
=
+
0 976
0 732 1
Thus:
PV
ss
PV
ss
s
s
()
()
.
.
.
(. )
=
+
=
+
1 0 976
0 732 1
0 976
0 732 1
According to Table 14-1, this response is in the form of the inverse
Laplace transform of a first-order response to a step input with lag:
704
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
15
Process Controllers
and Loop Tuning
L
−
−
+
=−
1
1
1
A
ss
Ae
t
()
sec
τ
τ
Hence, in the time domain, the process variable response will be equal to:
PV e
t
t
()
. sec
.=−
−
0 976 1
0 732
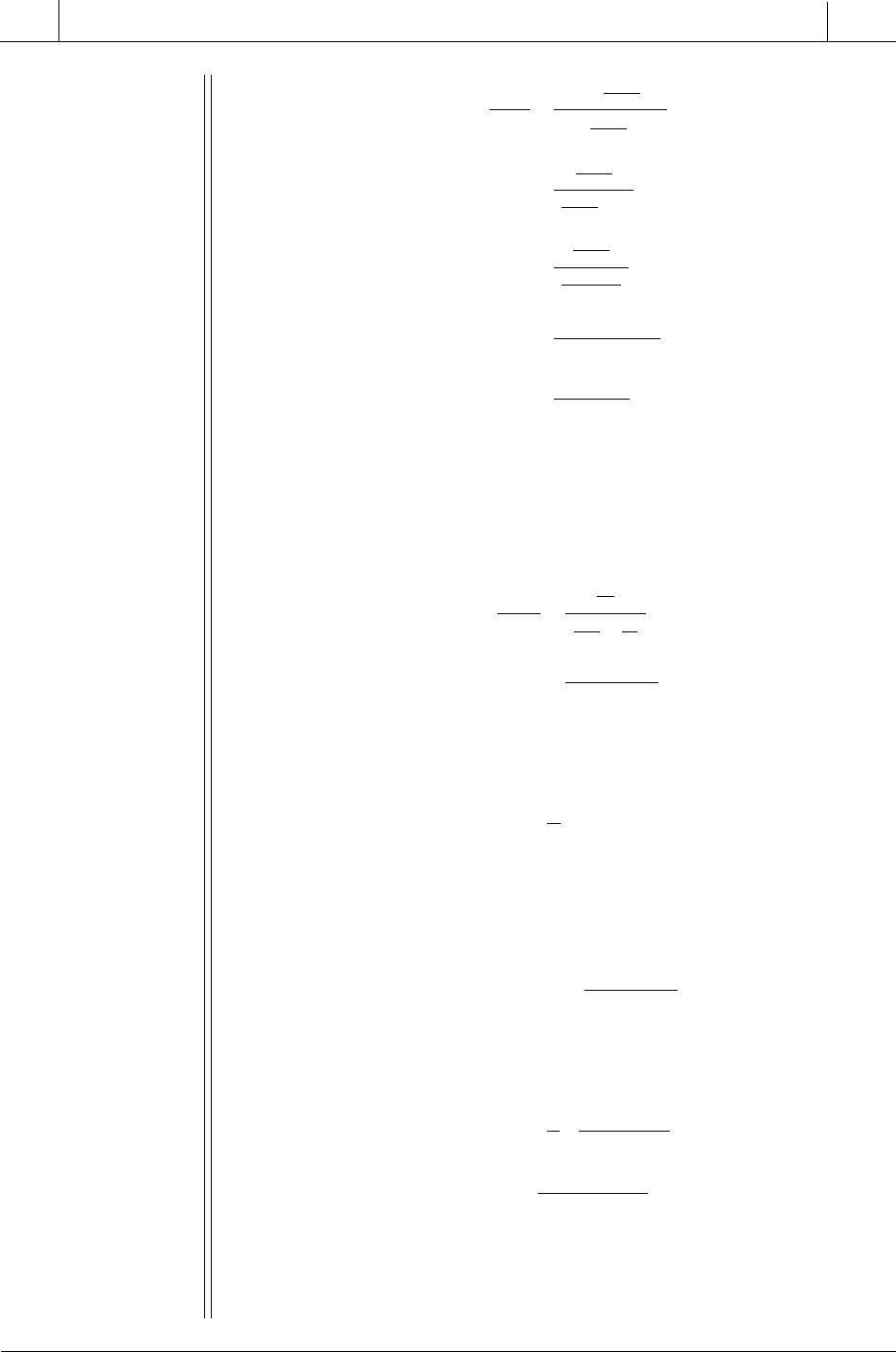
(c) Figure 15-35 illustrates the time response of the closed-loop
system to a unit step change in the set point. Note that the gain of the
system is 0.976, meaning that the process variable in the system will
not reach the value of the unit step input. Instead, the system will
respond only 0.976 to the unit step change of 1. The process variable
steady-state value (
PV
ss
), which is the final value of
PV,
can be
computed using the final value theorem:
PV e
SS
t
t
t
=−
=−
=
→∞
−
→∞
lim .
lim[ . ( )]
.
.
0 976 1
0 9761 0
0 976
0 732
Figure 15-35. System response to step change.
Therefore, the system will always have a residual error of 2.4% (1.0 –
0.976 = 0.024). The system time constant,
τ
sys
= 0.732, indicates that
the system will take 0.732 seconds to reach 0.615, 63% of the steady-
state value.
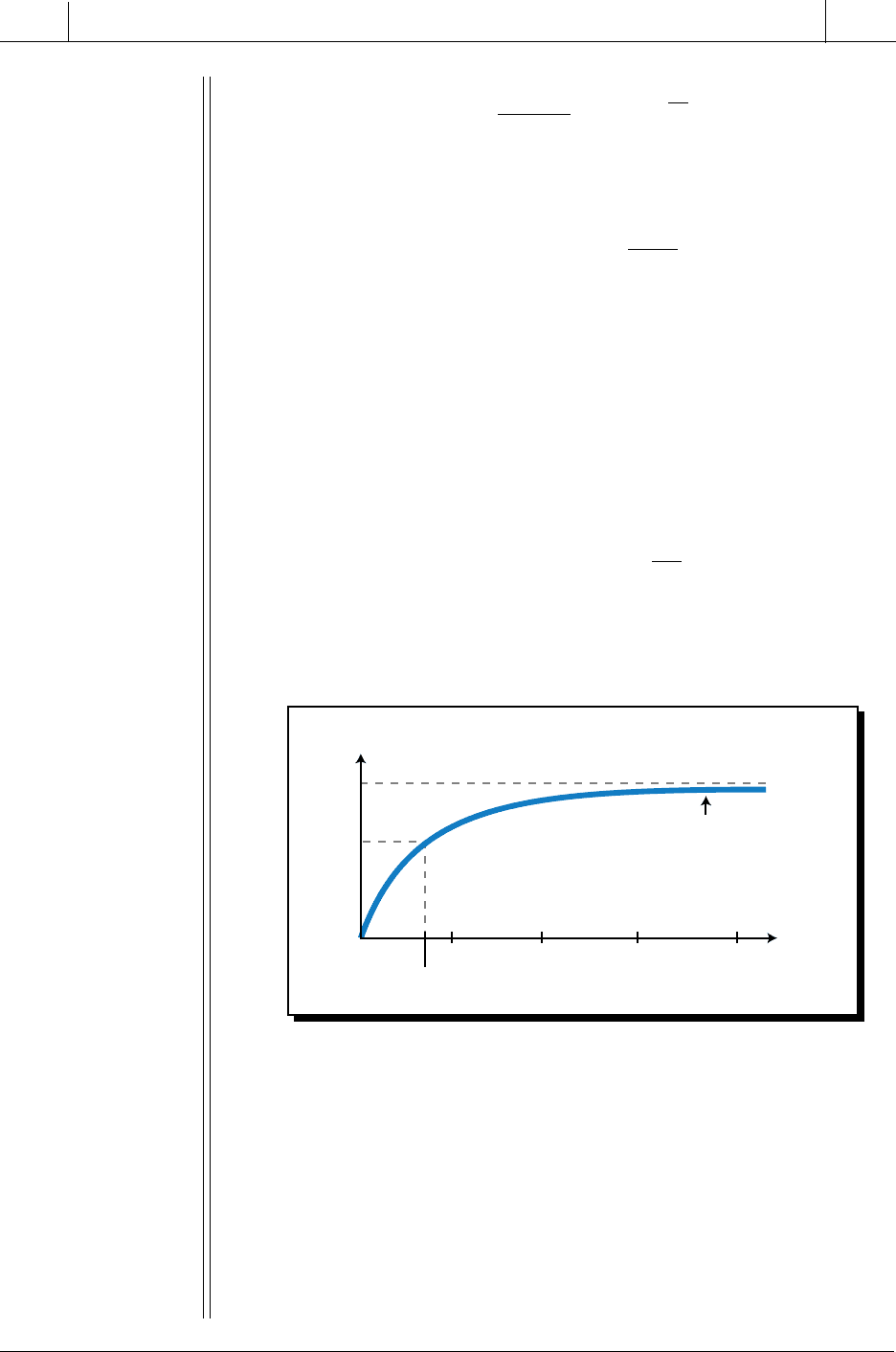
The open-loop response of the process to a step change would have
a steady-state value of 5 (see Figure 15-36a), where 1
τ would occur
at 30 seconds. The open-loop response of the controller and process
to a unit step would have a gain of 40 with this same τ
constant (30 sec).
PV
1
τ = 0.732
234
t
(sec)
0.615
1
0.976
705
CHAPTER
15
Process Controllers
and Loop Tuning
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
The closed-loop response of the controller and process, however,
would have a much smaller gain (in this case, 0.976) due to the
negative feedback in the control loop.
Figure 15-36. Open- and closed-loop responses shown in (a) detail and
(b) 10× detail.
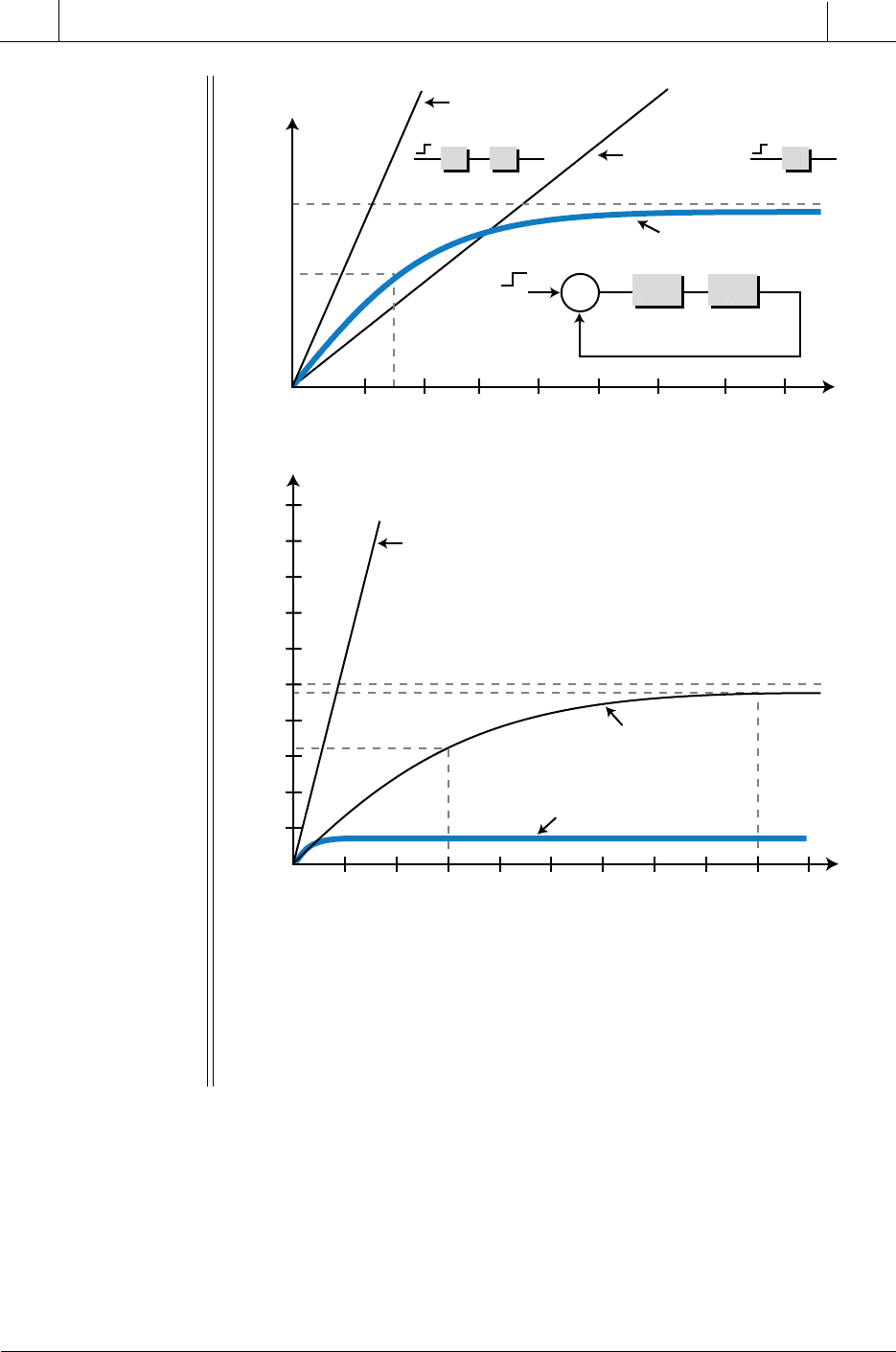
The value of the gain in a proportional controller influences the response of
a second-order closed-loop system as shown in Figure 15-37. The higher the
gain, the faster the process responds; however, cycling and overshoot occur.
Lowering the gain makes the response much slower and the value at steady
state smaller. For example, the value of K
P
= 1 in Figure 15-37 will cause a
slow, closed-loop response to a unit step change in the set point with a final
steady-state value of 0.5.
PV
Gain
1
τ
234
t
(sec)
0.615
1
Open Loop
HcHp
(Gain of 40)
Hc
Hc Hp
EPV
PV
PV
SP
+
–
Σ
Hp
Hp
PV
Open Loop
Hp
(Gain of 5)
(see graphic below)
10
9
8
7
6
5
4
3
2
1
1τ 3τ
10 20 30 40 50 60 70 80 90 100
Open Loop
HcHp
Value of 25.2 at 1τ
63% (3.15)
95% (4.75)
Open-Loop
Hp
Closed Loop
HcHp
(Final value of 0.976)
Closed Loop
PV
Gain
t
(sec)
(a)
(b)
706
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
15
Process Controllers
and Loop Tuning
15-6 INTEGRAL CONTROLLERS (I MODE)
An integral controller provides an output whose rate of change is propor-
tional to the error deviation. This means that the larger the error, the faster the
controller’s output changes and vice versa. An integral controller will stop
adjusting its output once the error becomes zero. When used in conjunction
Figure 15-37. Responses of a second-order closed-loop system to different values of
proportional gain.
HpHc
EPVSP
+
–
Σ
Hc = K
P
Hp =
1
(10
s
+ 1)(2.5
s
+ 1)
PV
Second-Order Process
(
τ
1
= 10 min,
τ
2
= 2.5 min)
1.5
1.0
0.5
0
PV
t
(min)
0 10.0 20.0
K
P
= 4
K
P
= 10
K
P
= 2
K
P
= 1
Proportional Gain
Proportional
Gain =
K
P
Reponses for various values of
K
P
in
Hc
to the closed-loop response
where
SP
(
s
)
= (unit step)
1
s
PV
SP
Hc
(
s
)
Hp
(
s
)
Hc
(
s
)
Hp
(
s
)
+ 1
=

707
CHAPTER
15
Process Controllers
and Loop Tuning
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
with a proportional controller, an integral controller will bring the system’s
residual error to zero. An integral controller’s output (CV) is represented by:
dCV
dt
KE
I
=
where:
dCV
dt
K
E
I
=
=
=
the rate of change in controller output in % over seconds
the integral gain in % of the controller output per second
per % error
the error in %
This differential equation indicates that the controller’s output CV
(t)
can
be obtained by taking the integral over time of both sides of the equation
so that:
dCV
dt
KE
dCV K Edt
dCV K Edt
CV CV K Edt
CV K Edt CV
I
I
t
I
t
tt I
t
tI
t
t
=
=
=
−=
=+
∫∫
∫
∫
=
=
00
0
0
0
0
() ( )
() ( )
where the term CV
(t=0)
is the value of the output at t = 0. When an integral
controller is used in a closed-loop system, it calculates CV
(t)
for every change
in error. So, if the value of the error changes after the controller has calculated
a previous value CV
(t)
, then it will use this previous value of CV
(t)
as the CV
(t=0)
value and calculate a new CV
(t)
output based on the new error.
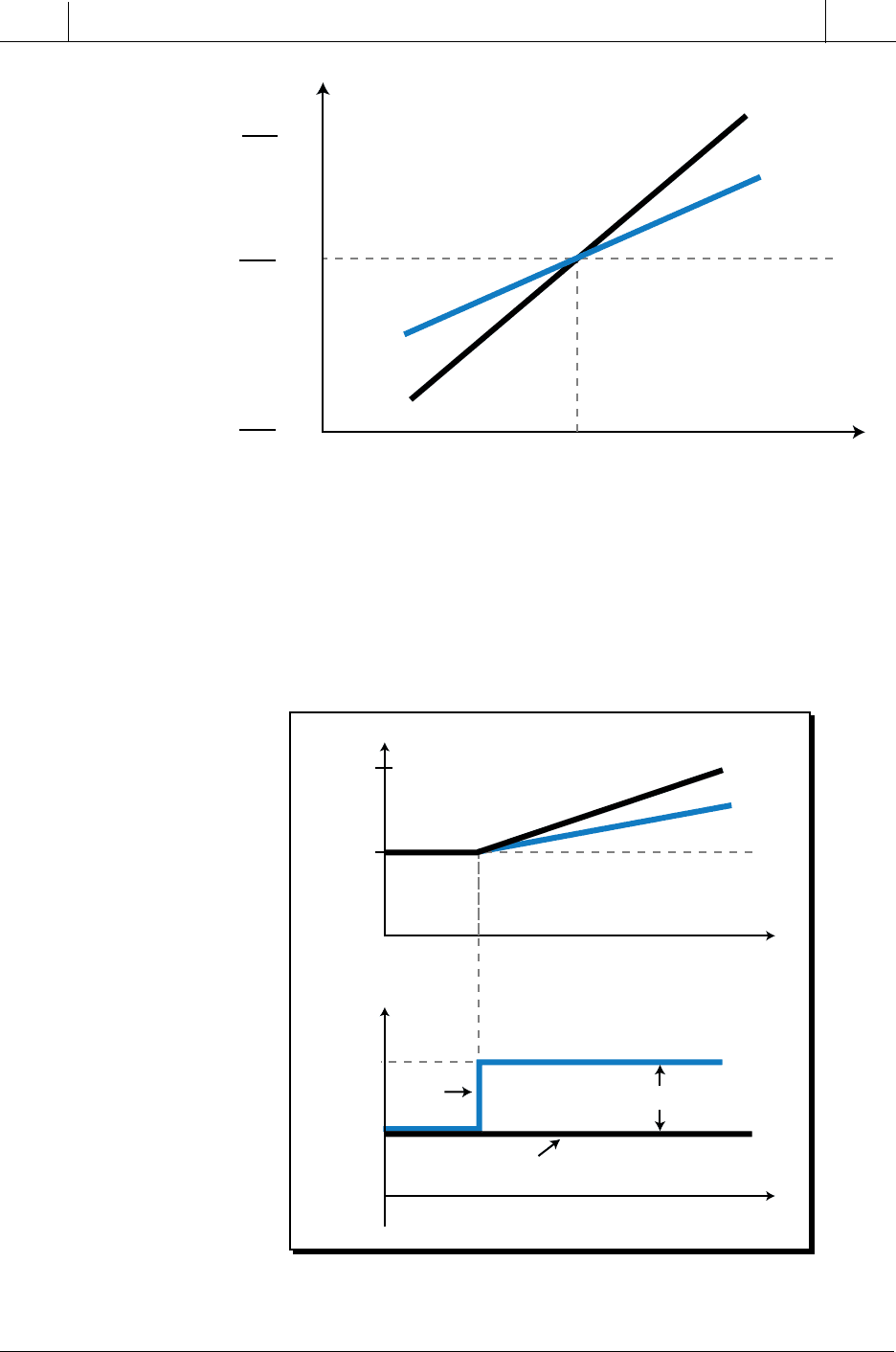
The integral gain K
I
(see Figure 15-38) indicates the sensitivity of the
output’s rate of change to the percentage of error that occurs over time. A
large value of K
I
means that a small error will produce a large rate of change
in the controller output. Conversely, a small value of K
I
means that a small
error produces a small rate of change in the controller output. In Figure 15-
38, the rate of change of K
I1
is greater than that of K
I2
.
Figure 15-39 illustrates the reaction of an integral controller’s output to a
change in the process variable due to a load disturbance. Note that, at the
moment the error occurs, the controller starts the integration of the error
708
SECTION
4
PLC Process
Applications
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
15
Process Controllers
and Loop Tuning
Figure 15-38. Integral gain.
Figure 15-39. Integral controller’s response to a step change in the process variable.
value, meaning that the control variable begins to increase as a function of
the magnitude of the error. The error in Figure 15-39 is constant, creating a
ramp integration of the controller’s output. That is, the amount of error
remains constant over time, so the control variable increases at a steady rate.
K
I
2
K
I
1
K
I
1
>
K
I
2
PV
<
SP PV
>
SPPV
= SP
E
= 0
dCV
dt
= –
dCV
dt
= 0
dCV
dt
= +
100%
50%
0%
CV
t
PV
t
PV
=
SP
SP
Error
PV
K
I
2
K
I
1
K
I
1
>
K
I
2