Bryan L. Programmable controllers. Theory and implementation
Подождите немного. Документ загружается.


239
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
SECTION
2
Components
and Systems
Continuous
Rate
Continuous
Rate
Continuous
Rate
End of
move 1
End of
move 2
End of
move 3
Move 1 Move 2 Move 3
Start
Move
Start
Move
Final
Position
Start
Move
Final
Position
Final
Position
Accl. Decel. Accl. Decel.Accl. Decel.
Rate
Position
Figure 8-22. Single-step profile mode.
In continuous mode, the motion profile is cycled through various accelera-
tions, decelerations, and continuous speed rates to form a blended motion
profile (see Figure 8-23). Rather than requiring additional commands for
motion speed changes, an interface in continuous mode receives the whole
move profile in a single block of instructions. The interface then performs the
step motor control duty until the motion is completed and the processor sends
the next profile. As in the single-step mode, the processor can store several
continuous mode profiles in its memory and send them to the interface during
the program execution.
Figure 8-23. Continuous profile mode.
Continuous
Rate
Continuous
Rate
Move 1 Move 2 Move 3
Rate
Position
Acceleration 2 Deceleration 3
Deceleration 4Acceleration 1
Continuous
Rate
Start
Position
Final
Position 1
Final
Position 2
Final
Position 3

240
SECTION
2
Components
and Systems
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Each stepper interface used to control a stepper motor controls an axis, since
the motion generated causes a movement about either the X-, Y-, or Z-axis
(see Figure 8-24). Depending on the PLC manufacturer, more than one axis
may be controlled using several stepper module interfaces. When multiple-
axis motions are required, the axes can be controlled either independently or
synchronously (see Figures 8-25a and 8-25b, respectively). When controlled
independently, each axis is independent of the other, executing its own
single-step or continuous profile mode. The beginning and end of each axis
motion may be different. When controlled synchronously, the beginning and
end of the motion commands for each axis occur at the same time. A profile
of one of the axes may start later or end before the other axes (see Figure 8-
25b), but the move that follows will not occur until all axes have started and
ended their motions.
Figure 8-24. PLC system using stepper modules to control three axes.
Translator
X-Axis
Translator
Translator
Y-Axis
Z-Axis
Y
X
Z
PLC
Stepper
Module #1
Processor and
Power Supply
Stepper
Module #2
Stepper
Module #3

241
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
SECTION
2
Components
and Systems
Figure 8-25. (a) Independent axis control and (b) synchronous axis control.
Move 1 Move 2
Axis 1-X
Move 3
Move 1 Move 2 Move 3
Move 1 Move 2 Move 3
Time
Speed
Rate
Axis 2-Y
Time
Speed
Rate
Axis 3-Z
Time
Speed
Rate
End of Move 1 End of Move 2 End of Move 3
Move 1 Move 2
Axis 1-X
Move 3
Position
Speed
Rate
Move 1 Move 2
Axis 2-Y
Position
Speed
Rate
Move 1 Move 2
Axis 3-Z
Position
Speed
Rate
(b) Synchronous(a) Independent

242
SECTION
2
Components
and Systems
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
The use of a position/velocity feedback scheme (see Figure 8-26) can greatly
improve the operation of a stepper motor control system, because this scheme
provides closed-loop positioning control. The most common feedback field
device used in a stepper control system is the encoder. In a position/velocity
feedback scheme, the encoder is interfaced with an encoder input module to
form a closed-loop stepper control system.
Figure 8-26. Stepper motor with a position/velocity feedback scheme.
Knowledge of the load being driven is useful when applying a stepper
interface in a stepper motor application. Loads with high inertia require large
amounts of power for acceleration or deceleration; therefore, proper inertia
matching is desired. As a rule of thumb, the load inertia should not exceed
ten times the rotor inertia. The friction of the system should be examined to
prevent the system from being underdamped (not enough friction) or from
losing position accuracy (too much friction).
Coupling mechanisms connect a stepper motor to its load. These mechanisms
include metal bands, pulleys and cables, direct drives, and leadscrews, which
are used mostly for linear actuation. Figure 8-27 illustrates a diagram of a
Stepper
Motor Driver
or Translator
Stepper
Motor
Absolute
Encoder
Encoder
Module
Stepper
Module
Turntable
Position
Feedback
243
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
SECTION
2
Components
and Systems
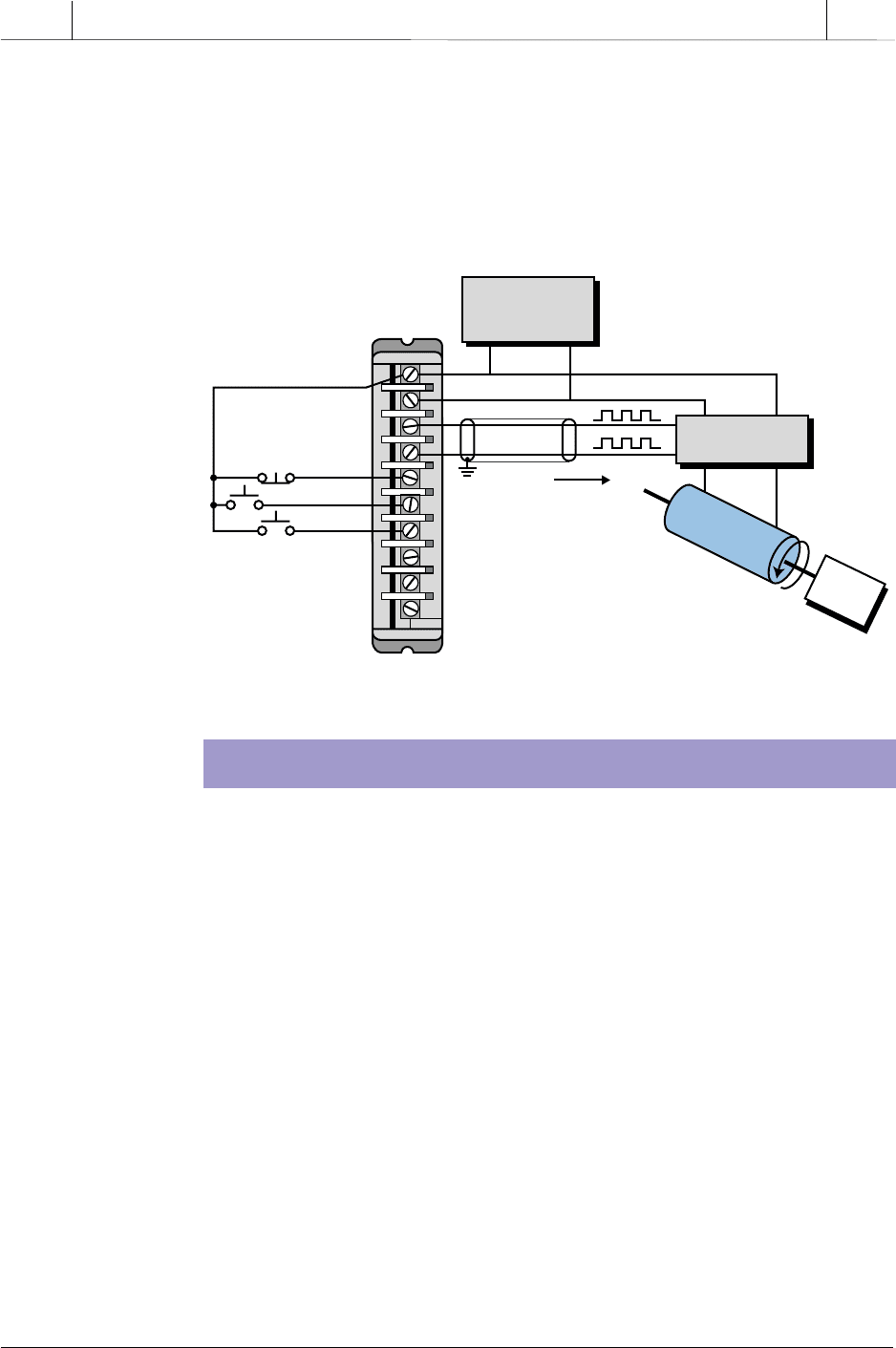
Figure 8-27. Stepper motor interface with jog forward and jog reverse capabilities.
typical stepper motor interface connection with jog forward and jog reverse
capabilities. During jog forward, the operator pushes the jog forward push
button, which turns the motor ON for as long as the button is pushed. This
allows for the load to be moved forward slightly, perhaps to place it in a
specific position. The jog reverse push button performs the same task but in
the opposite direction.
DC Power
Supply
Stepper Motor
Translator
+–
+
–
Load
Pulses
STOP
REV
FWD
–V
+V
JOG FWD
JOG REV
SERVO MOTOR INTERFACES
Servo motor interfaces are used in applications requiring control of servo
motors via servo drive controllers. A servo motor is a specially designed
motor that contains a permanent magnet. The speed of a servo motor can be
easily varied by changing the input voltage to the motor. A servo module
provides the drive controller with a ±10 VDC signal, which defines the
forward and reverse speeds of the servo motor. These modules are generally
used when axis motion control, either linear or rotational, is required. A
common linear motion example is a leadscrew assembly, which translates
rotational movements from a servo motor into linear displacement (see
Figure 8-28).
Applications that once employed clutch-gear systems or other mechanical
arrangements to perform motion control now use servo interfaces. The
advantages of servo control are shorter positioning time, higher accuracy,
better reliability, and improved repeatability in the coordination of axis
motion. Typical applications of servo positioning include grinders, metal-
forming machines, transfer lines, material-handling machines, and the
precise control of servo driver valves in continuous process applications.
244
SECTION
2
Components
and Systems
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Servo positioning controls operate in a closed-loop system, requiring feed-
back information in the form of velocity or position. Servo control interfaces
may receive velocity feedback in the form of a tachometer input, or position-
ing feedback in the form of an encoder input, or both. The feedback signal
provides the module with information about the actual speed of the motor
and the position of the axis. This information is then compared with the
desired velocity and the desired position of the axis. If the module detects a
difference between the desired and actual values, it will correct its output
until the error between the feedback data and the set point velocity and
position values is zero.
Figure 8-29 shows a servo control configuration block diagram. PLCs that
have positioning control capabilities require two modules—one to imple-
ment the servo control task and one to receive feedback and close the loop.
Some manufacturers, however, offer complete servo control for one axis in
a single module.
Servo control, like stepper motor control, can occur in either single-step or
continuous positioning mode (see Figure 8-30). Depending on the manufac-
turer, multiaxis control can also be synchronized in either single-step or
continuous mode.
The PLC processor sends all of the move and position information, includ-
ing acceleration, deceleration, and the final and feed velocities, to the servo
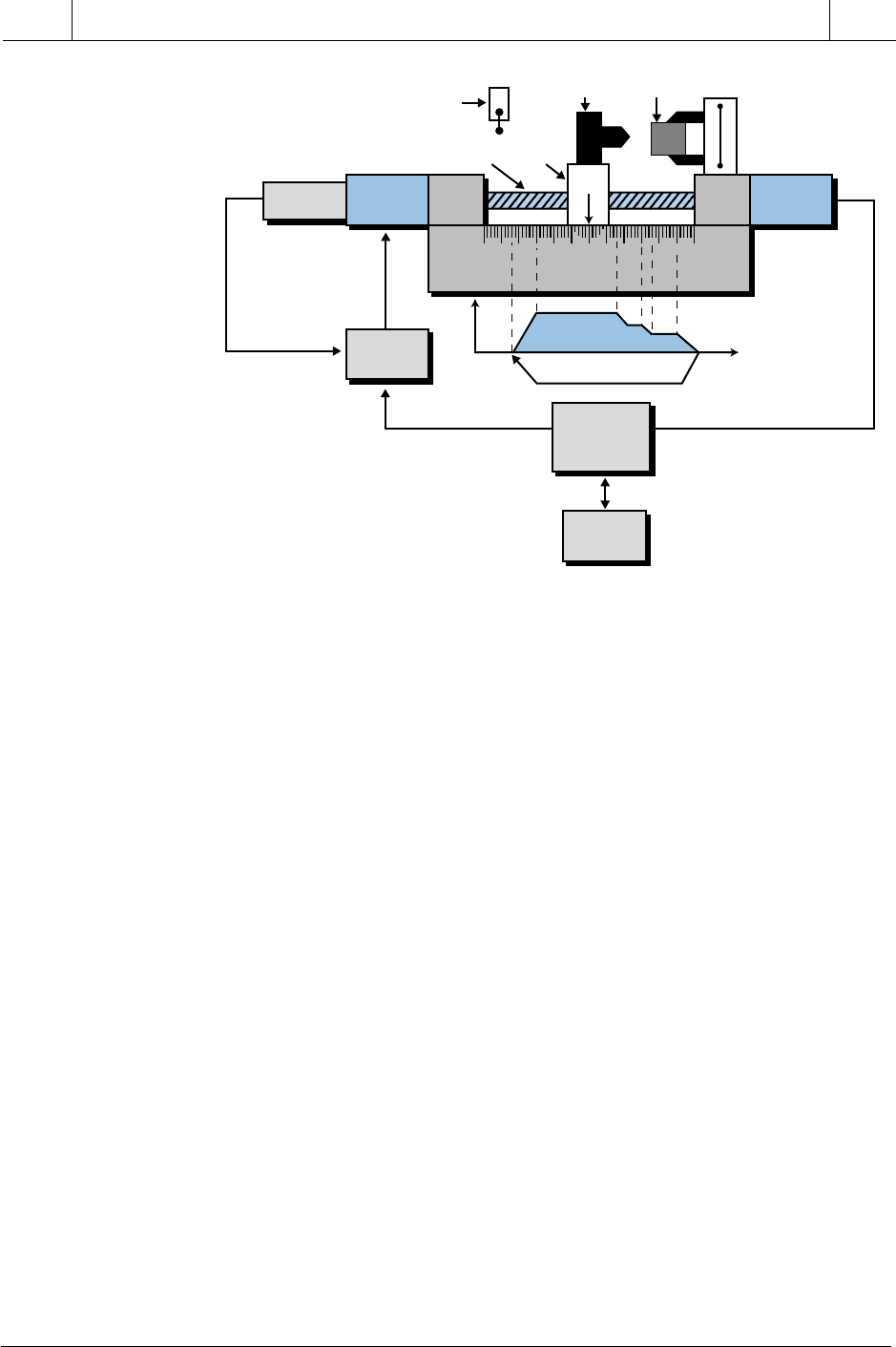
module. In axis positioning applications, including those performed by servo
Figure 8-28. Servo motor interface application.
Servo
Motor
Servo
Drive
PLC
Servo
Motor
Interface
Encoder
Rate
Position
Tach
Clamp
PartGrinder
Limit
Switch
Slide
Lead
Screw

245
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
SECTION
2
Components
and Systems
Figure 8-30. Servo control in (a) single-step and (b) continuous modes.
Figure 8-29. Servo control block diagram.
Motor
Tachometer
Encoder
Position
Feedback
Velocity
Feedback
Servo
Drive
Motor
Voltage
Speed
Command
±10 VDC
Data
Transfer
Processor Servo Motor
Interface
Constant
Rate
Constant
Rate
Move 1 Move 2
Accl. Decel. Accl. Decel.
Rate
Position
Return Move 3
(a) Single-step mode
Constant
Rate
Constant
Rate
Move 1 Move 2
Accl. Decel. Accl. Decel.
Rate
Position
Return Move 3
(b) Continuous mode
246
SECTION
2
Components
and Systems
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
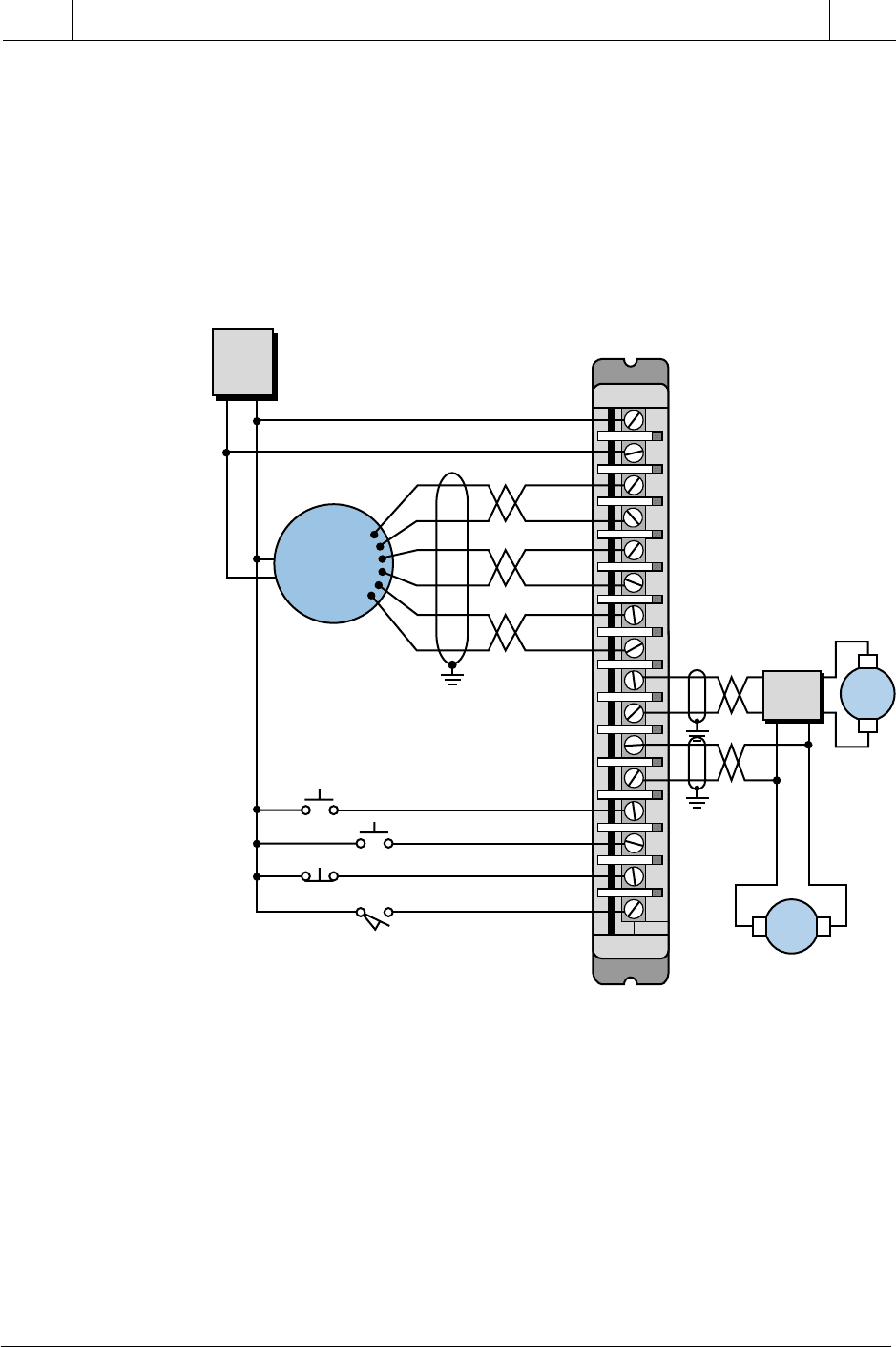
Figure 8-31. Servo motor interface connection diagram.
systems, the term feed velocity indicates a period of constant velocity. When
the module is operating, the processor monitors its status without interfering
with the module’s complex, rapid calculations. The processor updates the
module with a new move for an axis when the previous move has been
completed and the module is ready for a new profile. The acceleration and
deceleration parameters are given as speed in inches per minute per second
(ipm/sec) at a specific resolution. Figure 8-31 illustrates a typical field
connection diagram for a servo motor interface.
When servo interfaces are used for positioning control, the feedback resolu-
tion provided by the system is a key issue. For example, if an interface uses
a leadscrew (a rotational-to-linear motion translator) for axis displacement
and an encoder to provide a feedback signal to the servo module, the user
must know the leadscrew pitch, the number of encoder pulses per revolution,
and the multiplier value in the encoder section of the interface. Some
interfaces allow the user to select a multiplier, thus providing better feedback
resolution without changing the encoder. The example at the end of this
section will show you how some of these parameters are used.
Servo
Motor
Output
±10 VDC
Servo
Drive
Motor
Tach
Loss of
feedback
detection
(VDC)
+–
Channel A
Channel B
Marker
Common
Common
Common
+–
DC
Power
Supply
Encoder
Stop
JOG FWD
JOG REV
Limit Switch
+V
–V

247
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
SECTION
2
Components
and Systems
EXAMPLE 8-3
A PLC system uses a servo interface to perform a one-axis position-
ing of a metal part. This part will be machined at a defined profile,
which will be stored in the processor’s memory. A leadscrew, which
allows travel of 1/8th inch (0.125) per revolution, moves the part along
an X-axis. A quadrature incremental encoder, which has a 200 kHz
pulse frequency that provides 250 pulses per revolution, supplies
position feedback information. The encoder is connected to an encoder
feedback terminal in the servo interface that provides a software
programmable multiplier of ×1, ×2, and ×4 increments per pulse (× =
times).
(a) Find the feedback resolution and the number of pulses that will be
received if the part travels 12.5 inches. (b) Also, describe a way to
double the feedback resolution without changing the encoder.
S
OLUTION
(a) Feedback resolution is a function of the leadscrew pitch and the
product of the number of pulses per revolution generated by the
encoder and the feedback multiplier. The leadscrew’s pitch is 1/8th
inch, which means that the part will travel 0.125 inches for every
rotation (see Figure 8-32).
The feedback resolution is therefore:
Each servo interface has a predefined resolution, which varies from 0.001 to
0.0001 inches. A trade-off exists between axis velocity and feedback resolu-
tion, since axis speed is directly proportional to feedback resolution. Typical
axis positioning speeds range from 500 to 1000 inches per minute (ipm) and
encoder feedback input frequencies range up to 250 kHz. Remember that
resolution, or accuracy, diminishes as the speed increases (e.g., a resolution
of 0.0001 inches at 450 ipm will be 0.001 inches at 900 ipm).
The feedback resolution of a servo positioning (linear) interface can be
defined as:
0 125
250
0 0005
.
.
inch/rev
pulses/rev 1
inches/pulse
×
=
Feedback resolution =
Pitch of motion translator
(Encoder pulses per revolution)(Feedback multiplier)
248
SECTION
2
Components
and Systems
Industrial Text & Video Company 1-800-752-8398
www.industrialtext.com
CHAPTER
8
Special Function I/O and
Serial Communication Interfacing
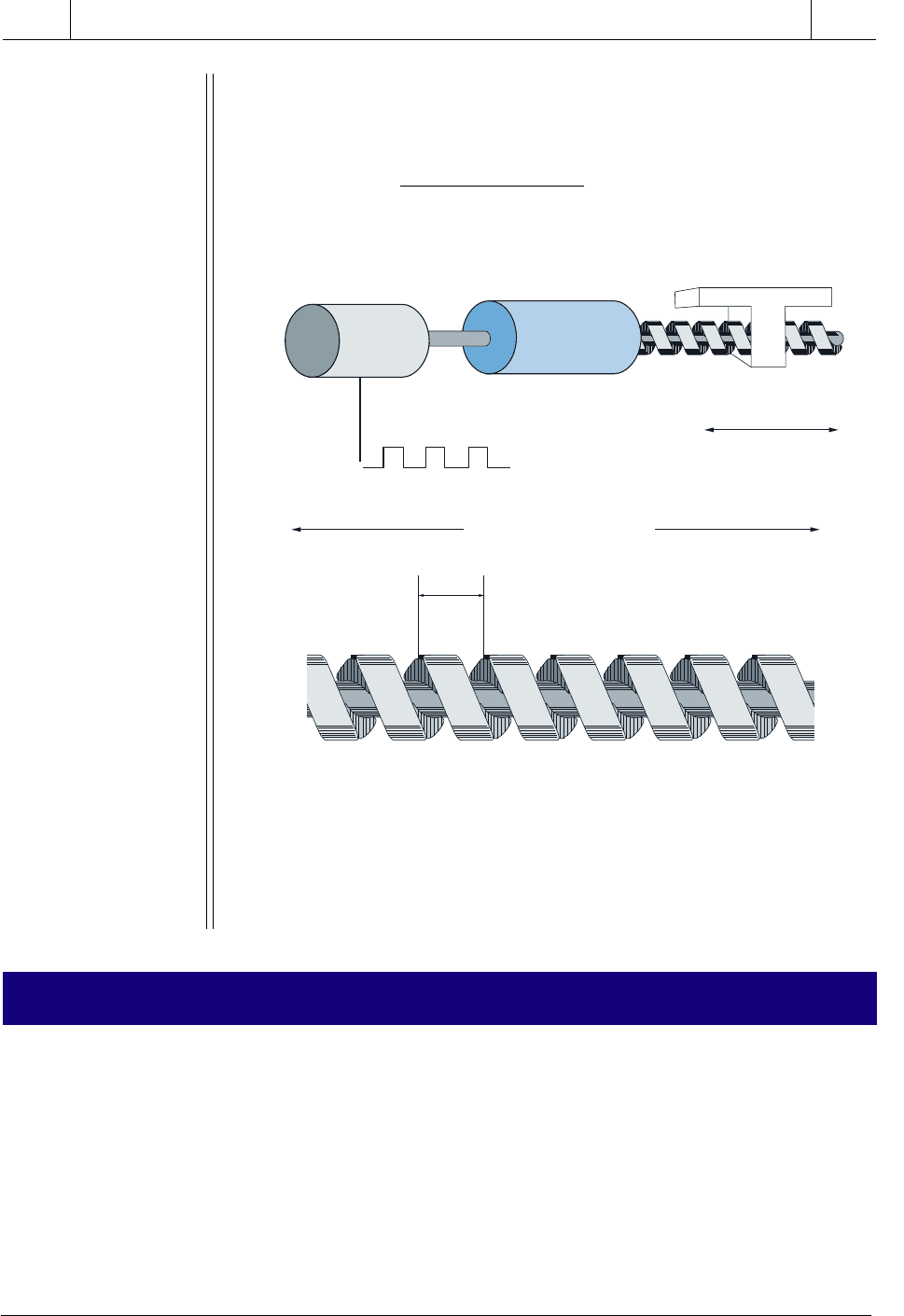
Figure 8-32. Leadscrew (linear) displacement system.
Thus, a metal part moving 12.5 inches will generate a position
feedback of:
12 5
0 0005
25 000
.
.
,
inches
inches/pulse
pulses=
(b) Using a multiplier of ×2 would improve the 0.0005-inch resolution
(movement per encoder pulse) to 0.00025 inches (0.0005 ÷ 2 =
0.00025). This ×2 multiplier option allows both of the quadrature pulses
(A and B) to be counted, yielding twice as many pulses in one rotation.
Some special I/O modules aid in the communication of information to the
real world. These intelligent modules accept data from and transmit data to
field devices, including computers and other PLCs. This data is transmitted
in one of the following forms:
• ASCII characters
• a computer language, such as BASIC or C
• a proprietary media, as in the case of a network
8-5 ASCII, COMPUTER, AND NETWORK INTERFACES
Pitch is
1/8 inch
in this
example
8 threads per inch
(8 pitch) in this example
Servo
Motor
Slide
Axis Motion
Encoder
Feedback
1 2
3 4 5 6
7
8