Бромберг П.В. Теория инерциальных систем навигации
Подождите немного. Документ загружается.

П. В.
БРОМБЕРГ
ТЕОРИЯ
ИНЕРЦИАЛЬНЫХ
СИСТЕМ
НАВИГАЦИИ
МОСКВА«НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1979
39.52
Б
88
УДК
629.7.05
Теория инерциальных систем навигации. Бромберг
П. В.— М.:
Паука. Главная редакция физико-математической литературы,
1979.— 296 с.
Инерциальные системы разбиваются
на три
больших класса: системы
полуаналитического типа, аналитического типа
и
бесплатформенные системы.
Вводится однопарамотричеекое семейство подобных эллипсоидов враще-
ния (/г-эллипсоидов,
h —
высота полета), которые
в
первом приближении
являются эквипотенциальными поверхностями поля силы тяжести. Центр
масс движется
по
поверхности А-эллииеонда (горизонтальные полеты самоле-
тов
и
движение морских кораблей).
Излагается теория чувствительных элементов
—
гиростабилизирован-
ных платформ, акселерометров
и
гироизмерителей абсолютной угловой ско-
рости. Приводятся алгоритмы инерциальных систем
с
учетом несферичности
Земли. Составляются уравнения ошибок
для
линейного анализа погрешно-
сти систем всех классов. Процесс формирования идеальных функциональных
схем инерциальных систем доводится
до
состояния алгоритма.
30501-117
Б
u5
3(02)-7i)
1С5
~
79
-
1502000000
Главная редакция
физико-математический литературы
издательства «Наука»,
1979
ПРЕДИСЛОВИЕ:
Бурное развитие современных транспортных средств доставки
полезных грузов
к
заданной дели
по
воде, воздуху
и в
космическом
пространстве привело
к
необходимости коренного усовершенство-
вания средств навигации
и
управления движущимися объектами.
Особенно интенсивно
в
настоящее время ведутся роботы
по
созданию
и
развитию инерциальных систем навигации,
в
которых
местоположение движущегося объекта определяется интегриро-
ванием измеряемых
па его
борту ускорений.
Для
многочисленных
проектирующих организаций
и
высших технических учебных
за-
ведений, готовящих
для
этих организаций специалистов, появи-
лась необходимость
в
монографиях
и
учебных пособиях,
в
кото-
рых систематически
и на
современном уровне излагалась
бы
тео-
рия инерциальной системы навигации.
В
предлагаемой книге
сделана попытка дать систематическое изложение этой теории.
При изложении материала автор использует исторически
сложившуюся классификацию инерциальных систем, разбивая
их
на
четыре больших класса: инерциальные системы пол у анали-
тического типа, аналитического типа, геометрического типа
и бес-
платформепные инерциальные системы;
в
каждом классе
еще
рас-
сматриваются различные подклассы возможных вариантов функ-
циональных схем. Из-за ограниченного объема книги системы
геометрического тина
в
книге
не
рассматриваются.
По мнению автора, такое изложение позволяет легче усваи-
вать материал
и
проще ориентироваться
в
многочисленных схе-
мах инерциальных систем.
При
решении конкретных задач различ-
ного типа используется математический аппарат, который,
по
мнению автора, наиболее приспособлен
для их
решения, упро-
щает промежуточные выкладки
и
позволяет получать конечные
результаты
в
простом
и
обозримом виде.
Так,
например, задачи,
связанные
с
преобразованием координатных систем, решаются
с привлечением методов матричного исчисления,
а
решение задач,
связанных
с
определением взаимного расположения линий визи-
рования,—
с
использованием метода единичной сферы,
т. е. ме-
тода сферической тригонометрии, получившего широкое распро-
странение
при
решении аналогичных задач
в
курсах сферической
астрономии.
При
этом
во
всех случаях
от
читателя
не
требуется
1
*
4
ПРЕДИСЛОВИЕ
специальной математической подготовки, выходящей за пределы
программ высших технических учебных заведений.
В книге большое внимание уделяется вопросам аналитичес-
кого представления гравитационного поля и поля силы тяжести
Земли; рассматриваются возможные системы координат, произво-
дится вывод формул счисления (т. е. выражений, связывающих
производные координат местоположения объекта с составляющими
вектора скорости).
В книге большое внимание уделяется разработке алгоритмов
инерциальных систем различных классов с учетом несферичности
Земли, причем делается попытка довести процесс формирования
идеальных функциональных схем инерциальных систем до состоя-
ния алгоритма.
В книге рассматриваются принципы построения однокомпо-
нентиого акселерометра, интегрирующего устройства, гироскопи-
ческого измерителя угловой скорости, стабилизированной платфор-
мы с индикаторно-силовой стабилизацией.
Заканчивается книга выводом уравнений ошибок для всех
классов и подклассов инерциальных систем, позволяющих прово-
дить линейный анализ выходных ошибок инерциальных систем
в зависимости от основных ипструмепталышх ошибок чувстви-
тельных элементов и ошибок начальной выставки. Входные ошиб-
ки,
т. е. инструментальные ошибки чувствительных элементов,
при исследовании уравнений ошибок инерциальных систем рас-
сматриваются или как постоянные или случайные величины, или
определенные или случайные функции времени.
При рецензировании и редактировании рукописи профессор
А. Д. Александров, профессор В. А. Боднер, профессор Н. Т. Ку-
зовков, В. Л. Леонидов, Т. В. Сапожникова, Л. И. Клигер и
Б.
В. Выжелевский сделали ряд ценных замечаний, которые были
учтены автором при доработке рукописи. Большую помощь
автору при подготовке рукописи к печати оказала М. П. Ыо-
жова. Всем им автор выражает свою искреннюю благодарность.
ГЛАВА 1
ФИГУРА ЗЕМЛИ, ПОЛЕ СИЛЫ ТЯЖЕСТИ ЗЕМЛИ,
КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ
§ 1.1. Фигуры Земли и координаты точек
на ее поверхности
1.1.1.
Геоид. Под фигурой Земли понимают поверхность воды
океана, которая заполняет узкие каналы, прорытые на суше.
В открытом океане она совпадает с поверхностью воды, невозму-
щенной волнами от приливов и ветра. В 1873 г. было предложено
такую поверхность называть геоидом [30].
В каждой точке геоида нормаль к его поверхности совпадает
с направлением силы тяжести, т. е. равнодействующей сил тяго-
тения и центробежной силы от вращения Земли.
Поверхность геоида является уровенной поверхностью силы
тяжести. Геоид имеет сложную и неправильную форму, обуслов-
ленную распределением масс в земной коре и на поверхности
Земли.
Такую поверхность трудно использовать в практических при-
ложениях. Поэтому подбирают поверхность достаточно простую,
которая настолько близко подходит к геоиду, что ее можно поло-
жить в основу большинства расчетов. Такой поверхностью яв-
ляется сфероид — эллипсоид вращения, имеющий небольшое сжа-
тие вдоль оси симметрии.
1.1.2.
Земной сфероид. На основе многочисленных градусных
измерений, произведенных в различных областях Земли, неодно-
кратно определялись элементы земного сфероида: длина его боль-
шой полуоси а и малой полуоси 6, являющейся осью вращения
Земли.
В СССР приняты элементы референц- эллипсоида Ф. Н. Кра-
совского"
Его элементы приведены в табл. 1.
Если выразить е
3
и е'
2
через а и во втором случае получен-
ное выражение разложить в ряд по степеням а *), то получим
*) Мы часто будем пользоваться разложением в биномиальный ряд Нью-
тона (1-f х)
е
= 1 -J- s% +
£
- ~ - X
й
+ • • -> который при | % | < 1 сходится
для любого вещественного е.
6
ЗЕМЛЯ, ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ
[ГЛ. I
Таблица
№ 1
Параметр
Обозначения
Численно
значение
Большая полуось
Малая полуось
Сжатие
Квадрат первого эксцентриси-
тета
Квадрат второго эксцентриси-
тета
а
Ъ
а
—
Ъ
а
а?
- У
1
6 378 245 м
6 356 856
М
0,003352 *)
0,006692
0,006738
1
*) Можно принять
а
равным
293
"3
•
соотношения
е
1
—
а (2 — а) = 2а — а
3
,
а
(2
(1
—
а)
2
=
2а + За
2
+
(1.1
Во многих случаях
мы
будем вести расчеты, пренебрегая величи-
нами второго порядка малости относительпо
ее. С
указанной точ-
ностью можно считать
.'2
2а.
(1.2)
Получили распространение также элементы Бесселя реферснц-
эллипсоида
(а = б 366 397 м, Ь = 6 356 079 м, а = 1 : 299,15)
и элементы Хайфорда
(а —
=
6 378 388 м, Ь = 6 356 909 м,
а
= 1 : 297,0).
Эллипсоид
с
эле-
ментами Хайфорда
был
принят
на Международной конферен-
ции
в
Париже
в 1911 г.
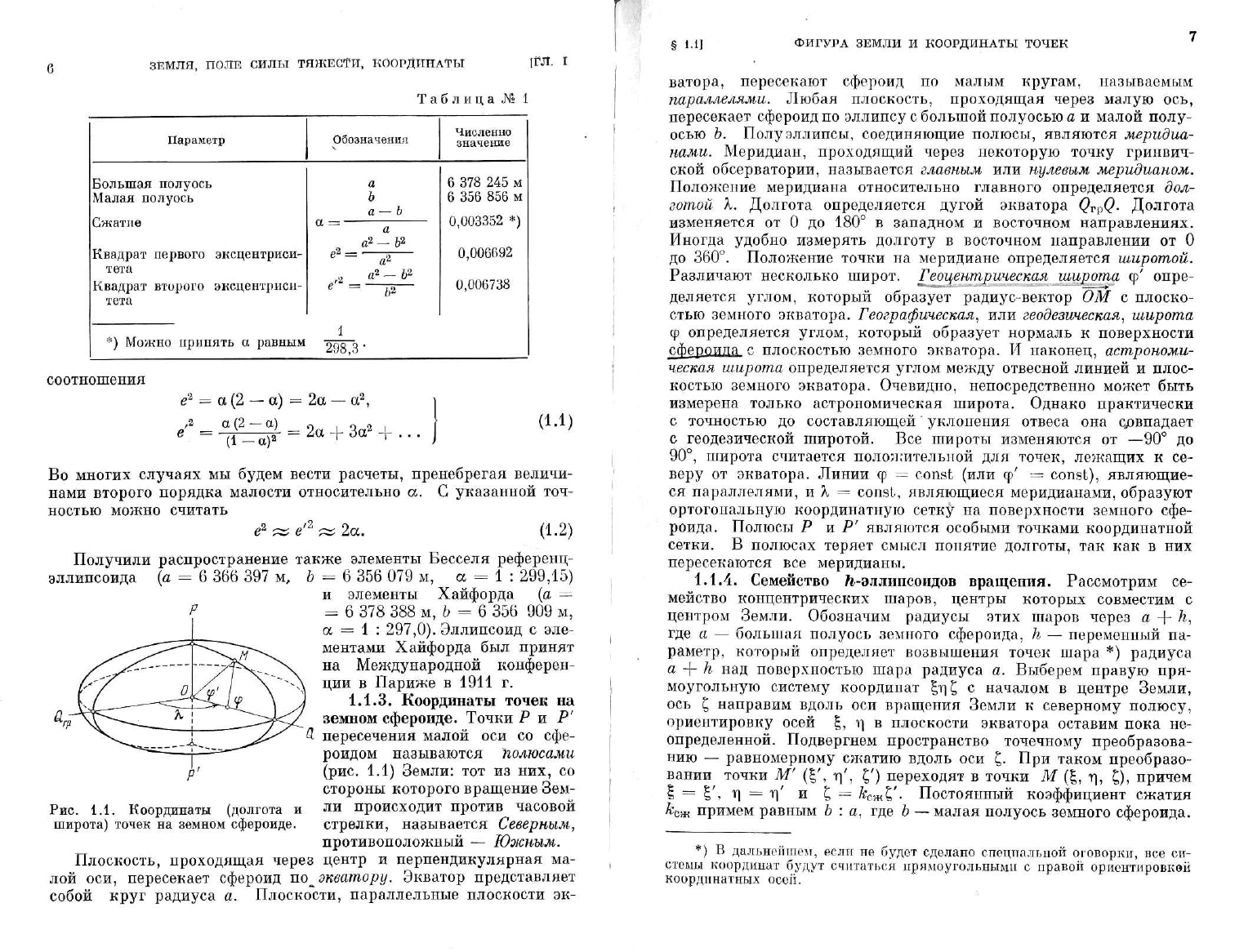
1.1.3.
Координаты точек
на
земном сфероиде. Точки
Р и Р'
3-
пересечения малой
оси со
сфе-
роидом называются Полюсами
(рис.
1.1)
Земли:
тот из них, со
стороны которого вращение Зем-
ли происходит против часовой
стрелки, называется Северным,
против опололшый
—
Южным.
Плоскость, проходящая через центр
и
перпендикулярная
ма-
лой
оси,
пересекает сфероид по_ экватору. Экватор представляет
собой круг радиуса
а.
Плоскости, параллельные плоскости
эк-
Рис.
1.1.
Координаты (долгота
и
широта) точек
на
земном сфероиде.
1.1]
ФИГУРА ЗЕМЛИ
И
КООРДИПАТЫ ТОЧЕК
7
ватора, пересекают сфероид
по
малым кругам, называемым
параллелями. Любая плоскость, проходящая через малую
ось,
пересекает сфероид
по
эллипсу
с
большой полуосью
а и
малой полу-
осью
Ь.
Полу эллипсы, соединяющие полюсы, являются меридиа-
нами. Меридиан, проходящий через некоторую точку гринвич-
ской обсерватории, называется главным
или
нулевым меридианом.
Положение меридиана относительпо главного определяется дол-
готой
X.
Долгота определяется дугой экватора
Q
VP
Q.
Долгота
изменяется
от 0 до 180° в
западном
и
восточном: направлениях.
Иногда удобно измерять долготу
в
восточном направлении
от 0
до 360°. Положение точки
на
меридиане определяется широтой.
Различают несколько широт. Геоцентрическая широта ц>' опре-
деляется углом, который образует радиус-вектор
ОМ с
плоско-
стью земного экватора. Географическая,
или
геодезическая, широта
Ф определяется углом, который образует нормаль
к
поверхности
сфероида
с
плоскостью земного экватора.
И
наконец, астрономи-
ческая широта определяется углом между отвесной линией
и
плос-
костью земного экватора. Очевидно, непосредственно может быть
измерена только астрономическая широта. Однако практически
с точностью
до
составляющей' уклонения отвеса
она
совпадает
с геодезической широтой.
Все
широты изменяются
от —90
е
до
90°,
широта считается положительной
для
точек, лежащих
к се-
веру
от
экватора. Линии
ср = const (или ф' = const),
являющие-
ся параллелями,
и X = const,
являющиеся меридианами, образуют
ортогональную координатную сетку
на
поверхности земного сфе-
роида. Полюсы
Р и Р'
являются особыми точками координатной
сетки.
В
полюсах теряет смысл понятие долготы,
так как в них
пересекаются
все
меридианы.
1.1.4.
Семейство Л-эллипсопдов вращения. Рассмотрим
се-
мейство концентрических шаров, центры которых совместим
с
центром Земли. Обозначим радиусы этих шаров через
а + h,
где
а —
большая полуось земного сфероида,
h —
переменный
па-
раметр, который определяет возвышения точек шара
*)
радиуса
а
+ h над
поверхностью шара радиуса
а.
Выберем правую пря-
моугольную систему координат
£т]£ с
началом
в
центре Земли,
ось
£,
направим вдоль
оси
вращения Земли
к
северному полюсу,
ориентировку осей
|, г) в
плоскости экватора оставим пока
не-
определенной. Подвергнем пространство точечному преобразова-
нию
—
равномерному сжатию вдоль
оси Z. При
таком преобразо-
вании точки
М' (!', т|', £')
переходят
в
точки
М (|, т), Q,
причем
|
=- |', г) -• т]' и £ =
&
с
.
ж
£'. Постоянный коэффициент сжатия
&сж примем равным
b : а, где b —
малая полуось земного сфероида.
*)
В
дальнейшем, если
не
будет сделано специальной оговорки,
все си-
стемы координат будут считаться прямоугольными
с
правой ориентировкой
координатных осей.
8 ЗЕМЛЯ, ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ [ГЛ. I
Основные свойства рассматриваемого преобразования состоят
в следующем:
1.
Точки, лежащие на прямых, переходят в точки, лежащие
на прямых.
2. Точки, лежащие на параллельных прямых, переходят в
точки, лежащие на параллельных прямых.
3. Касательная к кривой в точке М' переходит в касательную
к кривой в точке М.
4. Точка М\ делящая прямолинейный отрезок в определенном
отношении, переходит в точку М, делящую отрезок в том же со-
отношении.
Эти свойства легко установить, если иметь в виду, что уравне-
ния прямых до преобразования и после преобразования можно за-
писать соответственно в форме
V = So' + W V = По' + 72*, £' -= W + Уз*, (1.3)
£ = £о + Т№ ч = чо + Та?» Z =
hmto
+ *еж?я*. С
1
-
4
)
где £о'» "По'» to' — координаты некоторой начальной точки, Yn
7гт 7з — направляющие косинусы, s — длина прямой от началь-
ной точки до текущей точки.
При равномерном сжатии с коэффициентом /с
сж
= — гаар ра-
диуса а 4- k, уравнение которого имеет вид
(a -f й)
й 1
(а + 7()
2 1
(я + Л)
!
переходит в эллипсоид вращения, уравнение которого имеет вид
— = 1.
Большая полуось эллипсоида вращения a
h
= а + h, а малая по-
луось b
h
= —(a -f- К). Очевидно, при h = 0 получаем эллипсоид
вращения, совпадающий с земным сфероидом. Данные h-эллипсоиды
имеют одинаковый коэффициент сжатия]
ь
a
h
= -5 = Д
=
i_ JL
= tt
1.5
и одинаковый относительный
1
эксцентриситет
4 = ^1 =
е
*. (1.6)
Такие эллипсоиды называются подобными. Ось С является осью
симметрии всех ^эллипсоидов, В сечениях плоскостями, про-
§ i-fl
ФИГУРА ЗЕМЛИ И КООРДИНАТЫ ТОЧЕК
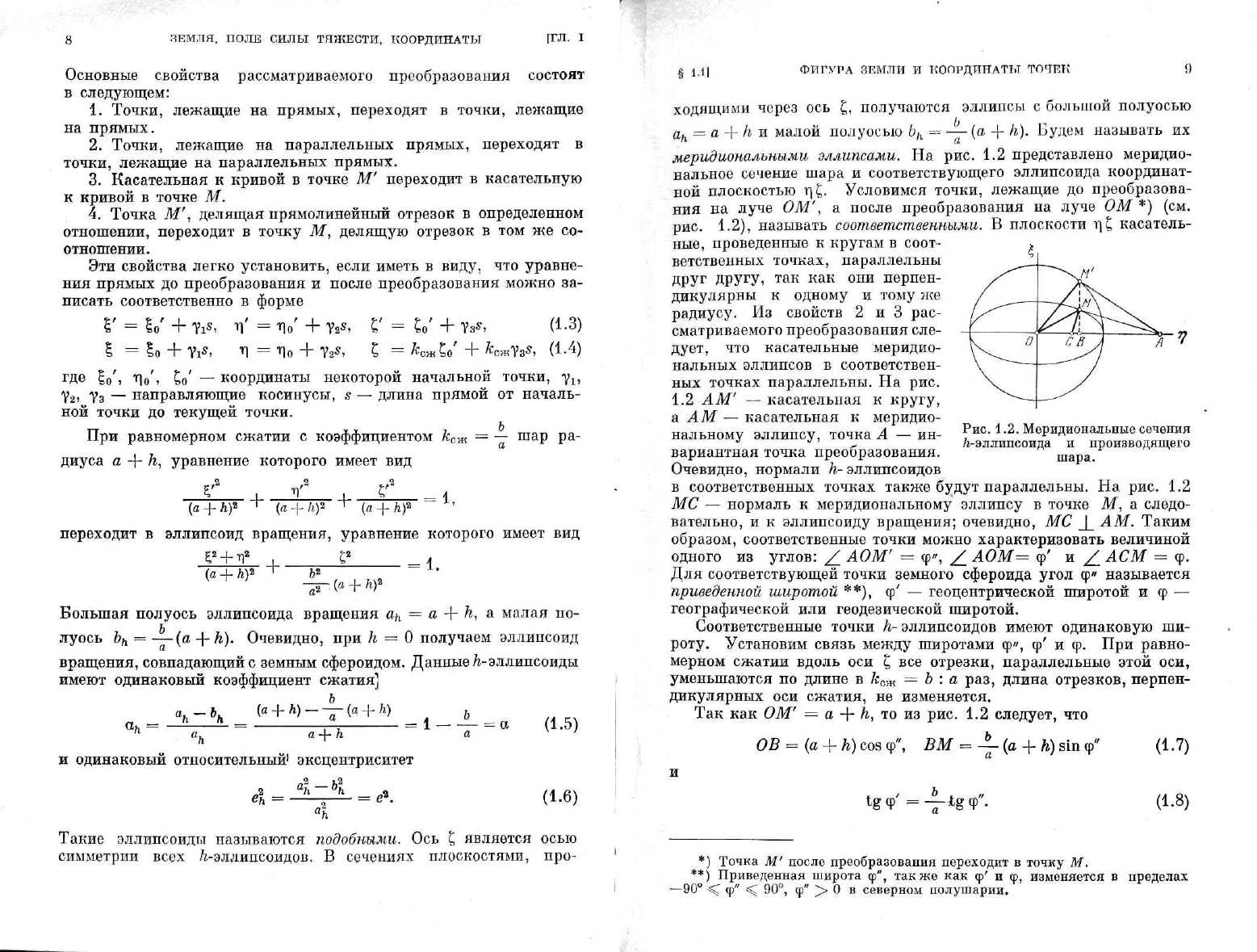
ходящими через ось £, получаются эллипсы с большой полуосью
Й
(1
= а + /i и малой полуосью
t>
ft
= (а + h). Будем называть их
меридиональными эллипсами. На рис. 1.2 представлепо меридио-
нальное сечение шара и соответствующего эллипсоида координат-
ной плоскостью
ч
£. Условимся точки, лежащие до преобразова-
ния на луче ОМ', а после преобразования на луче ОМ*) (см.
рис.
1.2), называть соответственными. В плоскости л £ касатель-
ные,
проведенные к кругам в соот-
ветственных точках, параллельны
друг другу, так как они перпен-
дикулярны к одному и тому же
радиусу. Из свойств 2 и 3 рас-
сматриваемого преобразовапия сле-
дует, что касательные меридио-
нальных эллипсов в соответствен-
ных точках параллельны. На рис.
1.2 AM' — касательная к кругу,
a AM — касательная к меридио-
нальному эллипсу, точка А — ин-
вариантная точка преобразования.
Очевидно, нормали h- эллипсоидов
в соответственных точках также будут параллельны. На рис. 1.2
МС — нормаль к меридиональному эллипсу в точке М, а следо-
вательно, и к эллипсоиду вращения; очевидно, МС J_ AM. Таким
образом, соответственные точки можно характеризовать величиной
одного из углов: /_ АОМ' =
ср",
/_ АОМ= ср' и АСМ = ср.
Для соответствующей точки земного сфероида угол
ср"
называется
приведенной широтой
**),
ср' — геоцентрической широтой и ср —
географической или геодезической широтой.
Соответственные точки h- эллипсоидов имеют одинаковую ши-
роту. Установим связь между широтами
ср",
ср' и ср. При равно-
мерном сжатии вдоль оси £ все отрезки, параллельные этой оси,
уменьшаются по длине в &
сж
= b : а раз, длина отрезков, перпен-
дикулярных оси сжатия, не изменяется.
Так как ОМ' = а ~\- h, то из рис. 1.2 следует, что
Рис. 1.2. Меридиональные сечения
/г-эллипсоида и производящего
шара.
ОВ = (а + h) cos ср", ВМ = ~ (а + h) sin ср"
(1.7)
и
tg Ф = —Ч Ф •
(1.8)
*) Точка М' после преобразования переходит в точку М.
**) Приведенная широта <р", также как ф' и ф, изменяется в пределах
—90° -С ф" ^ 90°, ф" ;> 0 в северном полушарии.
АВ
10 ЗЕМЛЯ, ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ
Далее имеем
AM' = (а + h) tg ф", АВ = ЛЛ/' sin ф", tg ф = -
Из формул (1.7) и (1.9) устанавливаем равенство
Щ
Ф = -f- tg Ф"-
Из (1.8) и
(1.10)
получаем, что
я
2
. ,
tg Ф = -тг
f
'g Ф •
[ГЛ. т
(1.9)
(1.10)
(1.10а)
Из формул (1.8) и
(1.10)
нетрудно получить следующие формулы
перехода:
ЙШф = —
COS ф" =
sin ф'
Ъ
Yi -f
e'
a
sin*<p'
COS ф'
]Л -\-е
л
sin
3
ф'
(1.11)
COS ф'
sin ф
Vi — e
2
sin
2
ф
COS ф
У
1
—
e
3
sin
2
9
Нам понадобятся еще формулы
COS ф
COS ф
sin ф'
COS ф
sin ф
Yi
— (2«
3
— e*)
sin
3
ф
(1 — e
2
)
sill
ф
УI — (2
e
a —
e
i)
sin
2
ф '
COS ф'
1 + (2e'
a
+ e'
4
)
sin
3
<p'
(1 + e
a
) sin ф
,
1 + (2e'
a
+ e'
4
)
sin
2
ф'
(1.12)
(1.12a;
Разности широт ф* — ф' и ф — ф' являются малыми величинами
порядка а. Пользуясь формулами (1.8) и
(1.10),
можно получить
выражения
Ц(ф"-ф') =
— — 1J tg ф' (— - 1) sin ф' cos ф'
l+^tg*?'
l +
(-^-l)sin
2
9
'
[1.13)
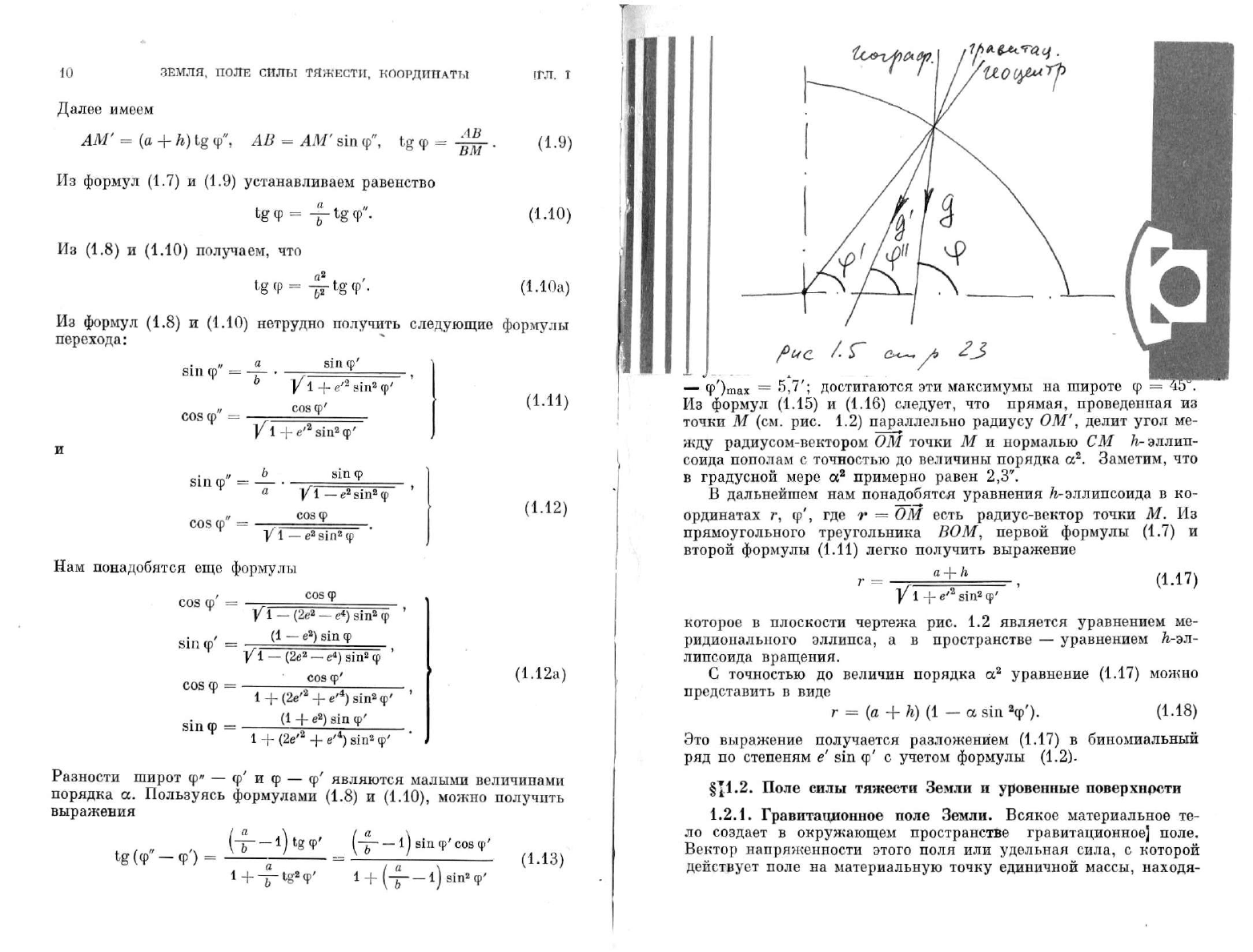
— ф')тах = 5,7'; достигаются эти максимумы на широте ф = 4Ь".
Из формул
(1.15)
и
(1.16)
следует, что прямая, проведенная из
точки М (см. рис. 1.2) параллельно радиусу ОМ', делит угол ме-
жду радиусом-вектором ОМ точки М и пормалью CM ft- эллип-
соида пополам с точностью до величины порядка а
2
. Заметим, что
в градусной мере а
2
примерно равен 2,3".
Б дальнейшем нам понадобятся уравнения Д-эллипсоида в ко-
ординатах г, ф', где г = ОМ есть радиус-вектор точки М. Из
прямоугольного треугольника /ЮМ, первой формулы (1.7) и
второй формулы
(1.11)
легко получить выражение
г =
Vi +е'
2
sin^'
(1.17)
которое в плоскости чертежа рис. 1.2 является уравнением ме-
ридионального эллипса, а в пространстве — уравнением Л-эл-
липсоида вращения.
С точностью до величин порядка а
2
уравнение
(1.17)
можно
представить в виде
г = (а + h) (1 - а sin V).
(1.18)
Это выражение получается разложением
(1.17)
в биномиальный
ряд по степеням е' sin ф' с учетом формулы
(1.2).
§'1.2. Поле силы тяжести Земли и уровенные поверхности
1.2.1.
Гравитационное поле Земли. Всякое материальное те-
ло создает в окружающем пространстве гравитационное] поле.
Вектор напряженности этого поля или удельная сила, с которой
действует поле на материальную точку единичной массы, находя-
перехода:
sin
<р
= — .
cos ф" —-
sin
ф'
COS ф*
+e'
3
sin
2
9'
8тф*
= J
sint
f
«
/1 —
e«sin"9
cos ф =
cos ф
COS
ф
yi
—
e*sin*<p
Нам понадобятся
еще
формулы
COS ф' =
sin
ф' =
cos ф =
sin
<p
—
У
l
- (2е* - t*)
sin
2
Ф
(1 - е
2
) sin ф
COS
ф'
1 + (2е'
а
+ е'
4
)
sin
2
ф'
(1 + е
2
) sin ф'
1 + (2е'
а
+
е
'
4
)
зт
2
ф'
(1.11)
(1.12;
(1.12а)
попяпк
Т
а
И
.
Ш
Г?°
Т
Ф
* ~ I'
Я ф
"
ф
'
ЯБЛ
™
Т
™ малыми величинами
выражения
П
°
ЛЬЗУЯСЬ
*°Р
м
У
лами
А-Ч и (1.10),
можно получить
w-*-!±^J±£^
(1ЛЗ)
ПОЛЕ
СИЛЫ ТЯЖЕСТИ. УРОВЕННЫЕ ПОВЕРХНОСТИ
11
-
i) tg Ф' ("р- -
0
SIN
Ф'
COS
Ф'
Ввиду малости углов
ф" — ф' и ф — ф' с
точностью
до
сотых долей
секунды
в
левых частях равенств
(1.13) и (1.14)
можно тангенсы
заменить углами. Если
в
правых частях
(1.13) и (1.14) -у
выразить
через
а и
разложить
их в
ряды,
то с
точностью
до
величин второго
порядка малости относительно
а (1.13) и (1.14)
можно предста-
вить
в
виде
ф
"_ф'
=-|_
Э
1
П
2ф',
(1.15)
Ф
— ф' = a sin 2ф'. (1.16)
В угловой мере
а ^ 11,5',
поэтому
(ф —
ф')тах
= 11,5' и (ф* —
— ф')тах
= 5,7';
достигаются
эти
максимумы
на
широте
ф = 45°.
Из формул
(1.15) и (1.16)
следует,
что
прямая, проведенная
из
точки
М (см. рис. 1.2)
параллельно радиусу
ОМ',
делит угол
ме-
жду радиусом-вектором
ОМ
точки
М и
нормалью
CM h-
эллип-
соида пополам
с
точностью
до
величины порядка
а
2
.
Заметим,
что
в градусной мере
а
2
примерно равен
2,3".
В дальнейшем
нам
понадобятся уравнения А-эллипсоида
в ко-
ординатах
г, ф', где г = ОМ
есть радиус-вектор точки
М. Из
прямоугольного треугольника
ВОМ,
первой формулы
(1.7) и
второй формулы
(1.11)
легко получить выражение
г= . " + " ^, (1.17)
У
1 +e"
!
sin^'
которое
в
плоскости чертежа
рис. 1.2
является уравнением
ме-
ридионального эллипса,
а в
пространстве
—
уравнением
Й-эл-
липсоида вращения.
С точностью
до
величин порядка
а
2
уравнение
(1.17)
можно
представить
в
виде
г = (
а
+ h) (1 — ос sin У). (1.18)
Это выражение получается разложением
(1.17) в
биномиальный
ряд
по
степеням
е' sin ф' с
учетом формулы
(1.2).
§11.2.
Поле силы тяжести Земли
и
уровенные поверхнрсти
1.2.1.
Гравитационное поле Земли. Всякое материальное
те-
ло создает
в
окружающем пространстве гравитационное] поле.
Вектор напрян;енности этого поля
или
удельная сила,
с
которой
действует поле
на
материальную точку единичной массы, находя-
12
ЗЕМЛЯ, ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ
[ГЛ. I
щуюся в точке М пространства с координатами -п, £, опреде-
ляется векторной формулой
д
.
^ ±Ъ_
Г
,
(Ug)
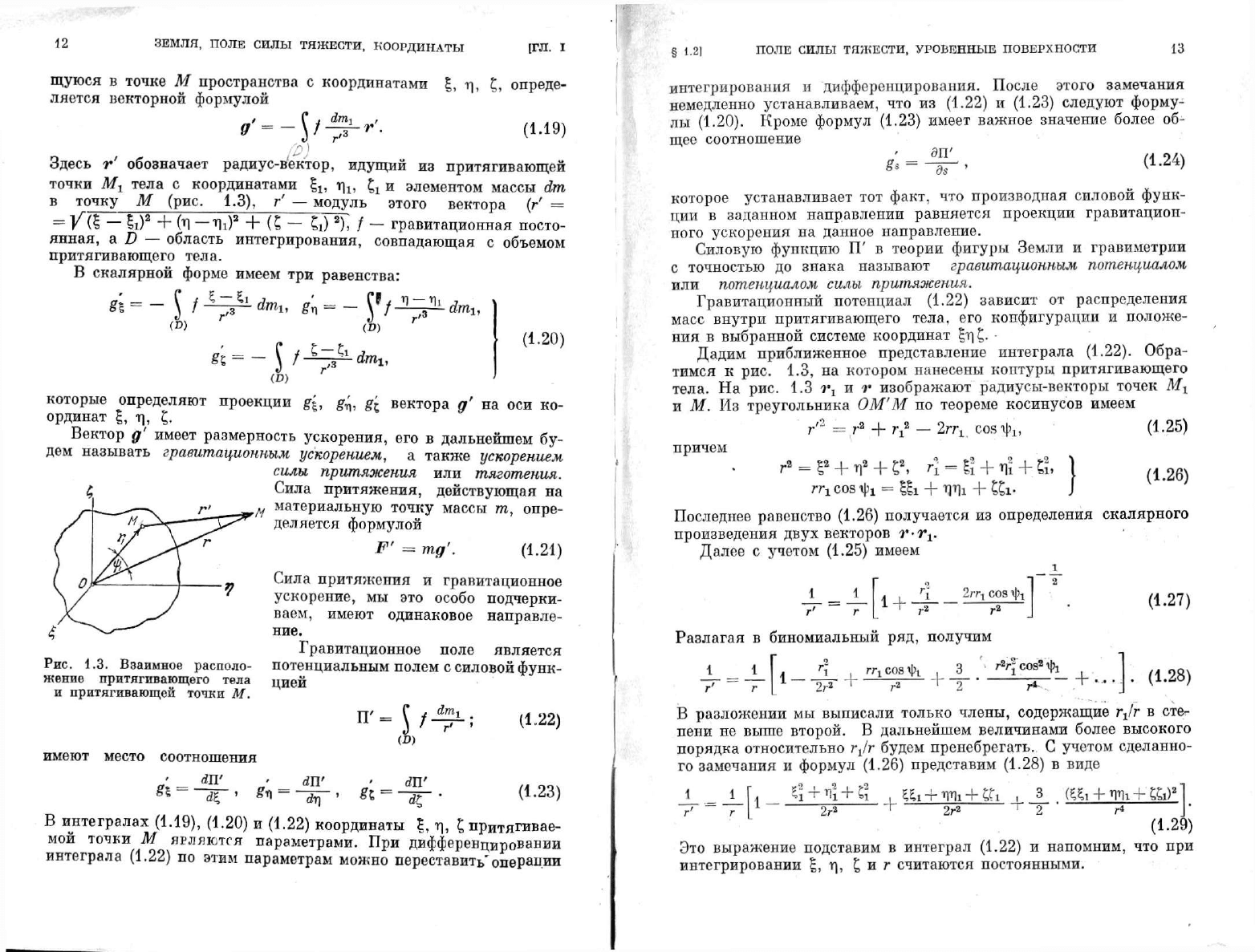
Здесь г' обозначает радиус-вектор, идущий из притягивающей
точки М
1
тела с координатами £
t
, т)
х
, ^ и элементом массы dm
в точку М (рис. 1.3), г' — модуль этого вектора (г' =
= Vil — lif +(ч—Лг)
а
+ (S — Е)
3
), /— гравитационная посто-
янная, а ,0 — область интегрирования, совпадающая с объемом
притягивающего тела.
В
скалярной форме имеем три равенства:
*i--[t
—г
1
*%•
?;
- -
J'/J^Lim,,
(1.20)
которые определяют проекции ffg, g^, ^ вектора д' на оси ко-
ординат I, Т|, £,
Вектор имеет размерность ускорения, его в дальнейшем бу-
дем называть гравитационным ускорением, а также ускорением
силы притяжения или тяготения.
Сила притяжения, действующая на
гМ
материальную точку массы т, опре-
деляется формулой
F'
= гад'.
(1.21)
Рис. 1.3. Взаимное располо-
жение притягивающего тела
и притягивающей точки М.
Сила притяжения и гравитационное
ускорение, мы это особо подчерки-
ваем, имеют одинаковое направле-
ние.
Гравитационное поле является
потенциальным полем с силовой функ-
цией
(Ь)
имеют место соотношения
В интегралах
(1.19),
(1.20)
и
(1.22)
координаты |, т|, £ притягивае-
мой точки М
ЯРЛЯЮТСЯ
параметрами. При дифференцировании
интеграла
(1.22)
по этим параметрам можно переставить'оперании
dW
(1.22)
(1.23)
§ t.2|
ПОЛЕ СИЛЫ ТЯД{ЕСТИ, УРОВЕННЫЕ ПОВЕРХНОСТИ
13
интегрирования и дифференцирования. После этого замечания
немедленно устанавливаем, что из
(1.22)
и
(1.23)
следуют форму-
лы
(1.20).
Кроме формул
(1.23)
имеет важное значение более об-
щее соотношение
Т.
которое устанавливает тот факт, что производная силовой функ-
ции в заданном направлении равняется проекции гравитацион-
ного ускорения па дапное направление.
Силовую функцию П' в теории фигуры Земли и гравиметрии
с точностью до знака называют гравитационным потенциалом
или потенциалом силы притяжения.
Гравитационный потенциал
(1.22)
зависит от распределения
масс внутри притягивающего тела, его конфигурации и положе-
ния в выбранной системе координат
£TJ£.
Дадим приближенное представление интеграла
(1.22).
Обра-
тимся к рис. 1.3, на котором нанесены коптуры притягивающего
тела. На рис. 1.3 г, и г изображают радиусы-векторы точек М
х
и М. Из треугольника ОМ' М по теореме косинусов имеем
г'
2
- г
2
+ п» -
2T7Y
cos.^i,
(1-25)
причем
rr
x
cos г|)! = Hi + и
Hi
+ E£i- J
Последнее равенство
(1.26)
получается из определения скалярного
произведения двух векторов г-г^
Далее с учетом
(1.25)
имеем
1 1
2гг, cos ф.
Разлагая в биномиальный ряд, получим
.
гг
г
cos ф
г
,3 Л?сой*ф1
1 —
(1.27)
.
(1.28)
В разложении мы выписали только члены, содержащие г
х
1г в сте-
пени не выше второй. В дальнейшем величинами более высокого
порядка относительно rjr будем пренебрегать. С учетом сделанно-
го замечания и формул
(1.26)
представим
(1.28)
в виде
1-
£
2
»1
2г
а
Hi + *Й1 +
СГх
2г
а
г*
(1.29)
Это выражение подставим в интеграл
(1.22)
и напомним, что при
интегрировании |, т|, £ и г считаются постоянными.
и
ЗЕМЛЯ,
ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ
[ГЛ.
I
Выберем теперь координатную систему
h\l так
чтобы
ее на-
чало совпадало
с
центром масс притягивающего тела
а оси ?, \
менты"/!
0 еГ0
/
лавными осями
инерции. Тогда статические
мо-
менты
и
центробежные моменты инерции будут равны нулю,
т. е
Ю>
Ф) ф)
(1.30)
(1.31)
(D
>
Ф) (D)
Кроме того, имеют место соотношения
$ (g + ^ +
g)dm
l
= 4-(
i
4
+ fl + C)i
(D)
l = ^-(С + В~ Л), \
ridm,
=-L(A+C-В),
(В)
А
2
С Ййт
х
= -1(В +
Л-С),
С»)
^ечьно'о^й^^Т™
ИПерЦИИ п
Р
ИТЯГИв
ающего тела относи-
тельно осей
т], £
соответственно.
С учетом сделанных замечаний гравитационный потенциал
ТГ
можно представить
в
виде
n u
П'
=
/-i^L
_ '
Л
+
В+С
+
?^&ЧС
± В ~ А) +
Ц
ЦА + С -В) + ± В -С)],
(1.32)
где
TOj
означает массу притягиваю-
щего тела.
Введем
для
притягиваемой точки
сферические координаты
г, о/ и Я,
причем положим
(рис. 1.4)
I
-
rcostp'cos^,
Т] -
Г
COS
ф'sin
X,
£
=
г sin
ф\
(1.33)
Тогда
(1.32)
можно привести
к
виду
Рис.
1.4.
Сферические
коорди-
наты
точки
М.
П'
= /-^-
+
ж[(^-^-)(1-з
8
шЧ')
+
+
-2-(5
—
Л)cos
3
ф'cos2X1.
(1.34)
Для Земли
ось £
направляют вдоль полярной
оси,
которая
считается
ее
главной осью. Далее пренебрегают небольшим отли
§
1-2]
ПОЛЕ
СИЛЫ ТЯЖЕСТИ, УРОВЕННЫЕ ПОВЕРХНОСТИ
чием друг
от
друга главных экваториальных моментов инерции
А
и
В, т. е.
полагают
А = В и
гравитационный потенциал Земли
записывают
в
виде
n'«4
+
£.-^<l-3sinV). (1.35)
где
С
— А =
цт
х
в
я
(1.36)
Я
=/т
4
(1.37)
—
так
называемый гравитационный параметр притягивающего
тела.
Безразмерный коэффициент
ц
характеризует распределение
масс внутри Земли.
Для
первоначальной оценки
р
будем считать
Землю однородным эллипсоидом вращения.
Тогда
С =
2
/
5
т,а
2
и А =
1
/б
m
i (
fl2
+ b
2
) и,
следовательно,
С
— А =
V
5
"'i
(а
2
- б
2
) -
Ve
eV^a
2
^
\amjO*. (1.38)
В этом случае
р, =
а/2,5.
В
действительности плотность пород,
ле-
жащих ближе
к
центру Земли, больше, поэтому коэффициент
р,
несколько меньше указанной величины,
он
примерно равен
а/3.
Таким образом,
ц.
есть величина того
же
порядка малости,
что
и коэффициент сжатия
а.
При
А — В
любая экваториальная
ось
является главной,
по-
этому
ось |
можно теперь направить
так,
чтобы гринвичский
ме-
ридиан оказался
в
координатной плоскости
££. В
таком случае
ф'
и X
будут геоцентрической широтой
и
долготой точки
М.
Гравитационное поле, определяемое потенциалом
(1.35),
имеет осевую симметрию. Первое слагаемое правой части
(1.35)
можно трактовать
как
потенциал центрального гравитационного
ноля.
Это
поле может вызывать любой
шар
массы
7%с
радиальным
распределением плотности
и с
центром, совпадающим
с
центром
Земли. Радиус этого шара должен быть меньше
г, т. е.
расстоя-
ния притягиваемой точки
М от
центра Земли. Второе слагаемое
с малым множителем
р,
определяет малое отклонение гравита-
ционного поля
от
центрального, обусловленное сплюснутостью
земного сфероида.
Средние значения параметров, фигурирующих
в
формуле
(1.35),
равны
К
= 398 546
км
3
/с
2
,
и. =
0,00109. (1.39)
Приведенные значения характеризуют истинные
с
точностью
0,1
—
0,15%.
Значения параметров
К и р.
будут уточняться
по
мере
на-
копления материалов
о
движении искусственных спутников Земли.
По гравитационному потенциалу
(1.35)
можно определить
вы-
ражение
для
проекции ускорения силы тяготения
д'.
Удобно
ой-
16
ЗЕМЛЯ,
ПОЛЕ СИЛЫ ТЯЖЕСТИ, КООРДИНАТЫ
[ГЛ.
I
ределить радиальную
g'
T
и
трансверсальную составляющие
д'.
Для
этой цели воспользуемся формулой (1.24), положив
со-
ответственно
в ней ds — dr и ds = г d<p' *).
Так, будем иметь
*
„ ад' к зр /
в
м. ,
С
1
-
40
)
^
Тлр-
=
--?г•
"2"("Г]
81п2<
Р'
Для формул
(1.40)
следует,
что
вектор
д'
лежит
в
плоскости
ме-
ридиана точки
М,
причем радиальная составляющая
g
r
направ
лена
к
центру Земли,
а
трансверсальная составляющая
g'
r
пер-
пендикулярна
g'
r
и
направлена
к
плоскости экватора
(на это
ука-
зывает знак минус).
1.2.2.
Поле силы тяжести. Сила тяжести определяется
как
рав-
нодействующая
сил
тяготения
и
центробежной силы
от
враще-
ния Земли. Центробежная сила
в
точке
М с
геоцентрической
ши-
ротой
ф'
направлена вдоль радиуса параллели, равного
г cos ф'.
где
г —
радиус-вектор точки
М.
Удельная центробежная сила
д",
имеющая размерность уско-
рения, численно равна
Ifr cos <р\
Очевидно, радиальная
g.
и трансверсальная составляющие удельной центробежной
силы определяются формулами
(1.41)
gy = — и
г
г
cos
ф"
sin tp'. j
Трансверсальные составляющие
g'^ и gy (см.
формулу
(1.40))
имеют одинаковое направление.
Можно говорить
о
поле центробежных
сил,
удельная центро-
бежная сила
g"
будет напряженностью этого поля.
Потенциал
П"
поля центробежных
сил
определяется выраже-
нием
JJ„
=
U
2
r
2
cos
2
tp'
(1.42)
В этом легко убедиться,
так как jf и g#
получаются дифферен-
цированием
П" в
соответствующих направлениях
(см. п.
1.2.1).
Введем безразмерную величину
U
2
d? ич
? = — -т- (1-43)
а
Эта величина определяет отношение центробежного ускорения
U
а в
точке, лежащей
на
экваторе Земли,
к
величине
К/а
г
,
которую
*)
Дуга
ds = гфр
положительна
в
сторону возрастания широты
q>'.
§
1.2]
ПОЛЕ СИЛЫ ТЯЖЕСТИ, УРОВЕННЫЕ ПОВЕРХНОСТИ
17
можно трактовать
как
ускорение силы тяготения
от
центральной
части поля тяготения Земли
на
экваторе.
Эта
величина получает-
ся
из (1.40) при и- = 0 и г = а.
Если
из (1.43)
определить
U
2
и
подставить
его в (1.42), то
полу-
чим выражение
для
потенциала
П" в
виде
п
„ _ q
К
г
2
cos
2
Ф'
fl
4/д
11
- 2 ' а
3
'
причем
5=^Щ^
=
0
'
003468
-
(1
-
45)
Эта величина очень близка
к
значению коэффициента сжатия Зем-
ли
а = 0,003352.
Поле силы тяжести является также потенциальным полем:
его потенциал
П
определяется суммой потенциалов
П' и П".
В соответствии
с
формулами
(1.35) и (1.44)
имеем
П
.
+ ^(1-3 sin
2
Ф
') + -f • cos"
Ф
'. (1.46)
Радиальная
g
r
и
трансверсальная
gy
составляющие ускоре-
ния силы тяжести получаются дифференцированием
П в
соответ-
ствующих направлениях
(см. п.
1.2.1):
*-т-ЧЧ*++
("г)
3
(1
~
3
siil2
ф
'
}
"
ё
W
cos2
ф
'1'
(1.47)
1.2.3.
Уровенные поверхности поля силы тяжести. Уравнение
уровепной поверхности поля силы тяжести получается приравни-
ванием потенциала
П
некоторой константе.
С учетом формулы
(1.46) это
уравнение можно записать
в
виде
X
Г-1
+
JL (JL)
2
(1 _ 3 sin
2
ф') + -§-
(-£•
)
3
(1
- sin
2
ф')] =
const.
(1.48)
Будем давать константе
те
значения
П,
которые
она
принимает
при
ф' = О И г = а + h,
причем
h
будем считать положительным
параметром*). Тогда уравнение
(1.48)
можно записать
в
виде
т- [
1
+-т а-т -
з
™
г
*
)+J
r (^)
3
<
а
-** *ч ] -
*)
Ниже будет показано,
что
введенный здесь параметр совпадает
с па-
раметром,
фигурирующим
в
теории Л-эллипсоидов.