Бобцов А.А., Лямин А.В., Чежин М.С. Операторный метод анализа и синтеза линейных систем управления
Подождите немного. Документ загружается.

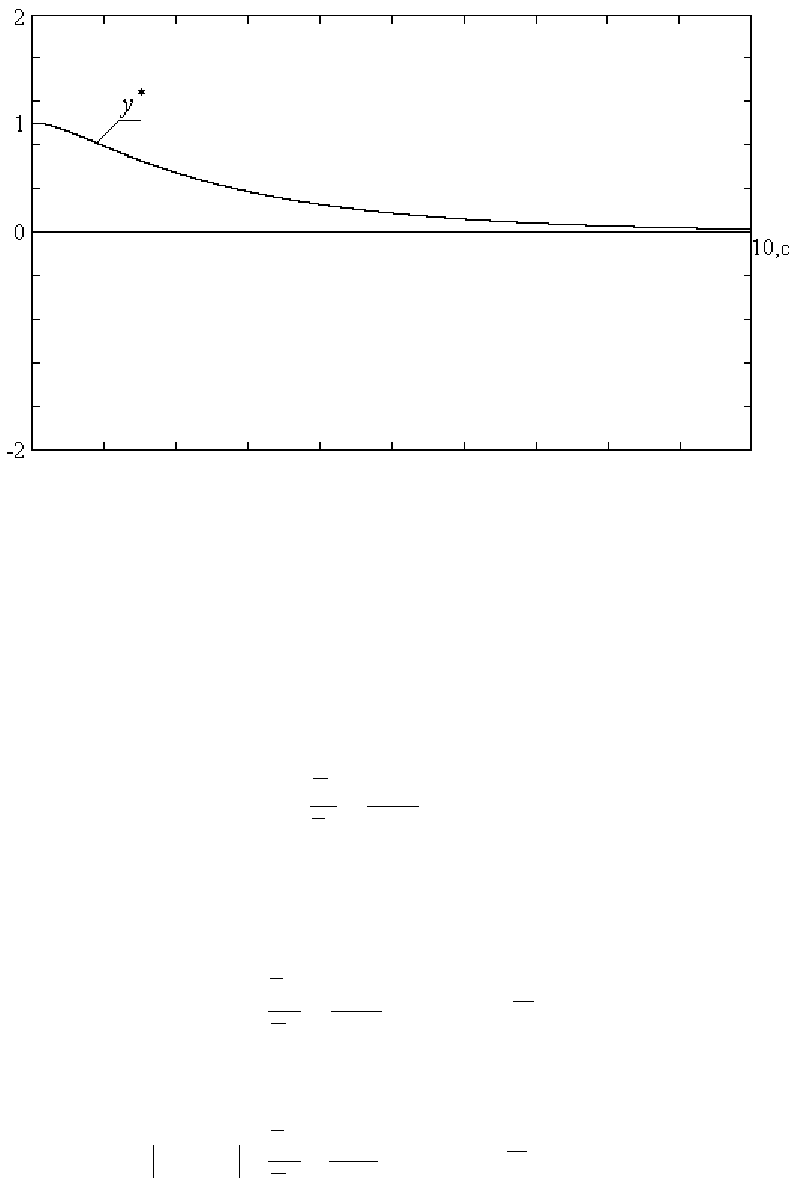
Рис. 3.6. Переходные процессы замкнутой системе управления
Исходя из требований точности, предъявляемых к системе управления, строим
запретные области. Для выполнения требования (3.2) необходимо, чтобы коэффици-
ент
удовлетворял условию
p
k
10
05.0
5.0
1
1
==
ε
≥
a
k
p
. (3.19)
Примем коэффициент
, тогда условие (3.2) будет выполнено. Для выполне-
ния требования (3.4) необходимо, чтобы
15=
p
k
2.0
25.0
05.0
==
ε
≤δ
y
y
y
a
,
1
=
ω
≤
ω
y
. (3.20)
Для выполнения требования (3.6) необходимо, чтобы
1.0
1.0
01.0
)( ==
ε
≤ω
f
f
з
a
jW
,
500
=
ω
≥
ω
f
. (3.21)
Строим желаемую асимптотическую ЛАХ разомкнутой следящей системы (см. рис.
3.7) и асимптотическую ЛАХ разомкнутой системы (см. рис. 3.8):
2
)( upWy
y
=
. (3.22)
31

Очевидно, что система (3.22) не удовлетворяет приведенным техническим требова-
ниям и, следовательно, должна быть модернизирована с помощью регулятора
W .
Передаточную функцию регулятора находим следующим образом:
)(
2
p
)(
)(
)(
2
2
2
sa
sb
sW =
1−∗
=
yp
WW
1
115
+
=
s
s
. (3.23)
Откуда следует, что
s
s
sW
1515
)(
2
+
= . Асимптотическая ЛАХ регулятора
s
s
sW
1515
)(
2
+
= приведена на рис. 3.9. Структурная схема системы управления
представлена на рис. 3.10. ЛАХ и ЛФХ разомкнутой системы приведены на рис.
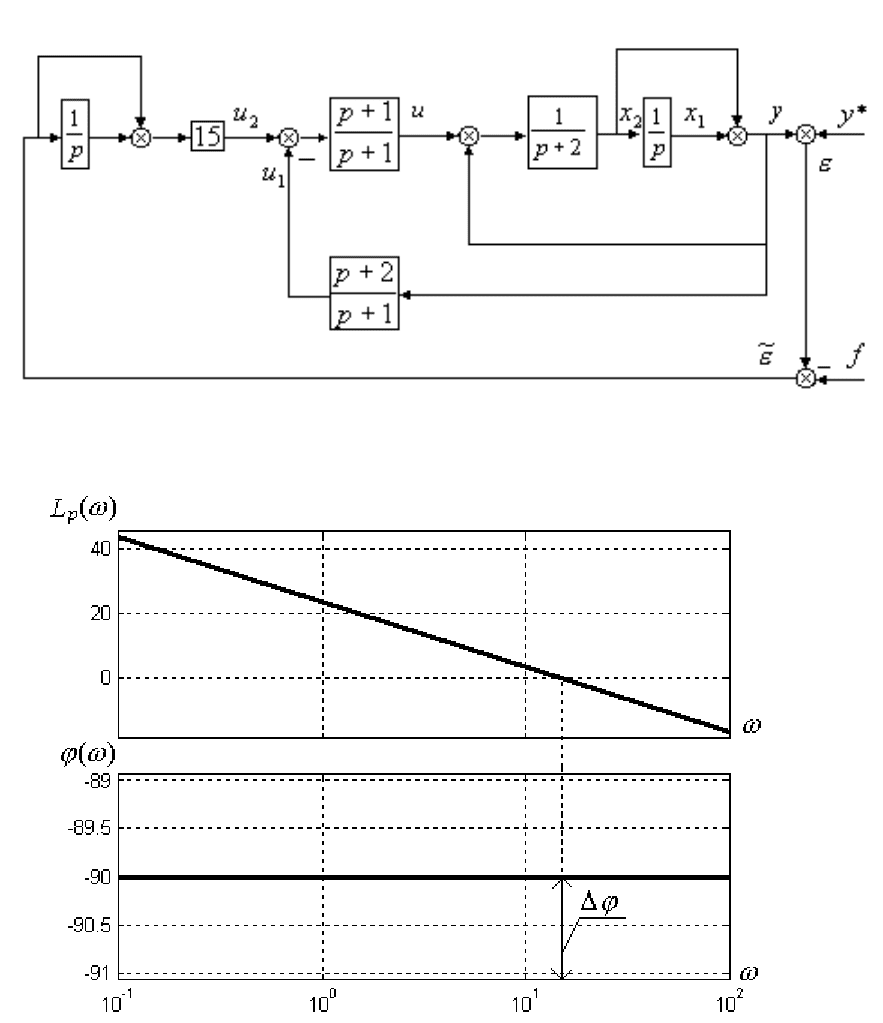
3.11. По графикам находим запас устойчивости по амплитуде и фазе, которые соот-
ветственно составляют:
6≥
∆
L
дБ;
00
3090 ≥=ϕ∆ .
Рис. 3.7. Желаемая асимптотическая ЛАХ
32

Рис. 3.8. Асимптотическая ЛАХ системы (3.22)
Рис. 3.9. Асимптотическая ЛАХ регулятора
s
s
s
1515
)(
2
+
=
W
3.5. Построение электронной модели регулятора
В данной части рассмотрим построение электронной модели регулятора для раз-
работанного регулятора. Сначала, осуществим преобразование модели вход – выход
регулятора
)
~
)()()((
210
ε
+
−
= pWypWpWu
33
к модели вход-состояние-выход
ε
+
+=
~
21
ByBAxx
&
,
ε
+
+
=
~
21
DyDCxu , (3.24)
где матрицы
такие, что
2121
,,,,, DDCBBA
11
1
10
)()()( DBAIpCpWpW +−=−
−
,
22
1
20
)()()( DBAIpCpWpW +−=
−
.
Рис. 3.10.Структурная схема системы управления
Рис. 3.11. ЛАХ и ЛФХ разомкнутой следящей системы
34

Поскольку передаточная функция
1
1
)(
0
+
+
=
s
s
sW является составляющей регулято-
ра, а не объекта управления, то она может быть сокращена, и для расчета управле-
ния целесообразно использовать следующий закон управления:
ε
+
−
=
~
)()(
21
pWypWu , (3.25)
где
1
1
1
)(
0
=
+
+
=
p
p
pW
.
Теперь найдем неизвестные коэффициенты матриц уравнения (3.24). Для этого
представим передаточные функции
W и ) через элементарные звенья такие
как: сумматор, интегратор и усилитель. Структурная схема уравнения (3.25) через
элементарные звенья показано на рис. 3.12.
)(
1
s (
2
sW
Рис. 3.12. Структурная схема регулятора
Обозначив выход каждого из интеграторов, соответственно, как
и получаем
модель вход-состояние-выход
1
x
2
x
ε
+
+
−
=
~
1
0
0
1
00
01
2
1
2
1
y
x
x
x
x
&
&
,
21
15xxyu
+
−
−
=
ε
+
~
.
Откуда следует, что матрица неопределенных коэффициентов
=
=
−
=
1
0
;
0
1
;
00
01
21
BBA ;
[
]
151
−
=
C ; 1
1
−
=
D ; . 1
2
=D
35
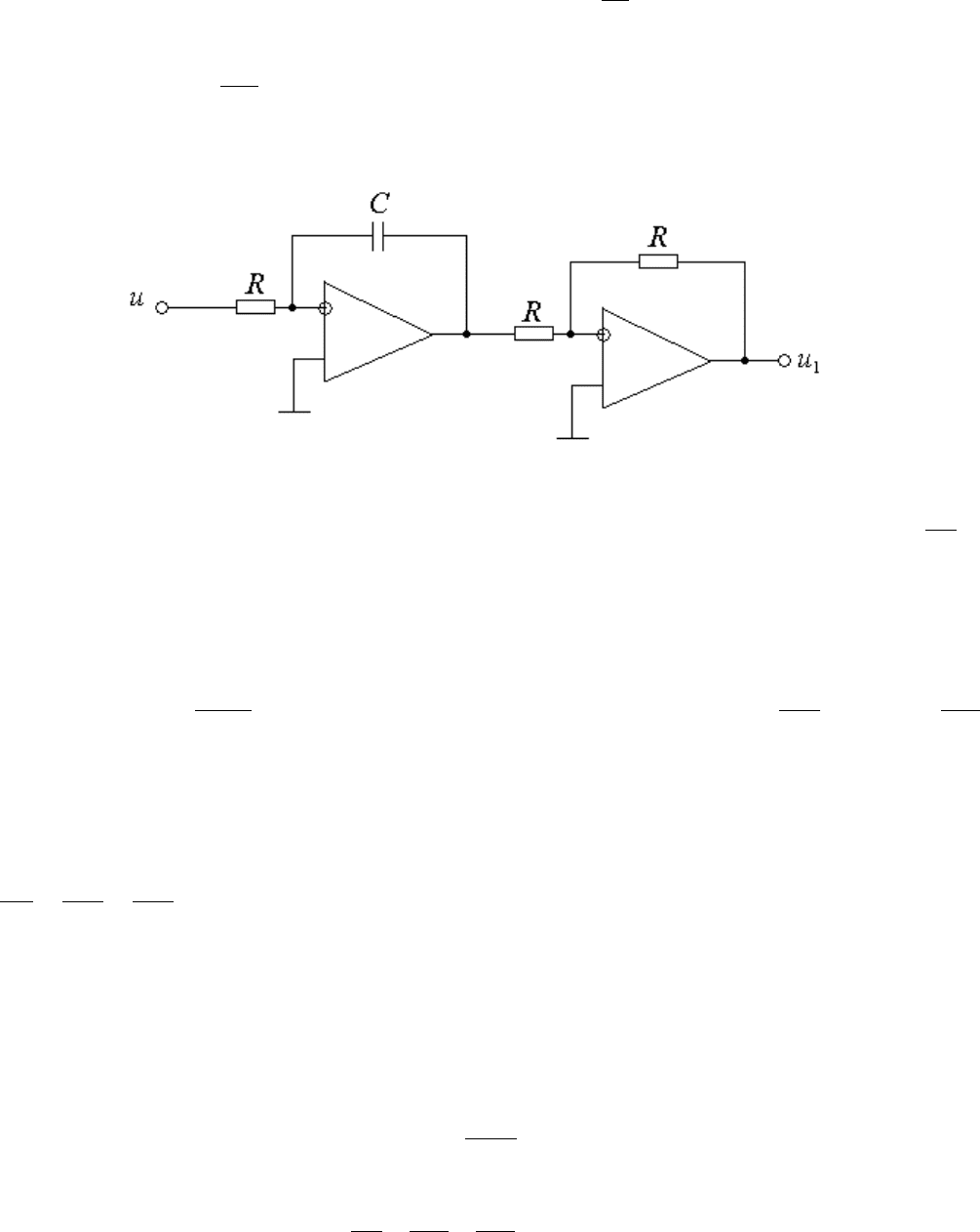
Теперь, по структурной схеме построим электронную реализацию регулятора.
Звено регулятора с передаточной функцией
s
s
15
)( =W представлено на рис. 3.13, где
коэффициент
CR
k
p
1
= .
Рис. 3.13. Электронная схема, реализующая передаточную функцию
s
k
s
p
=)(
W
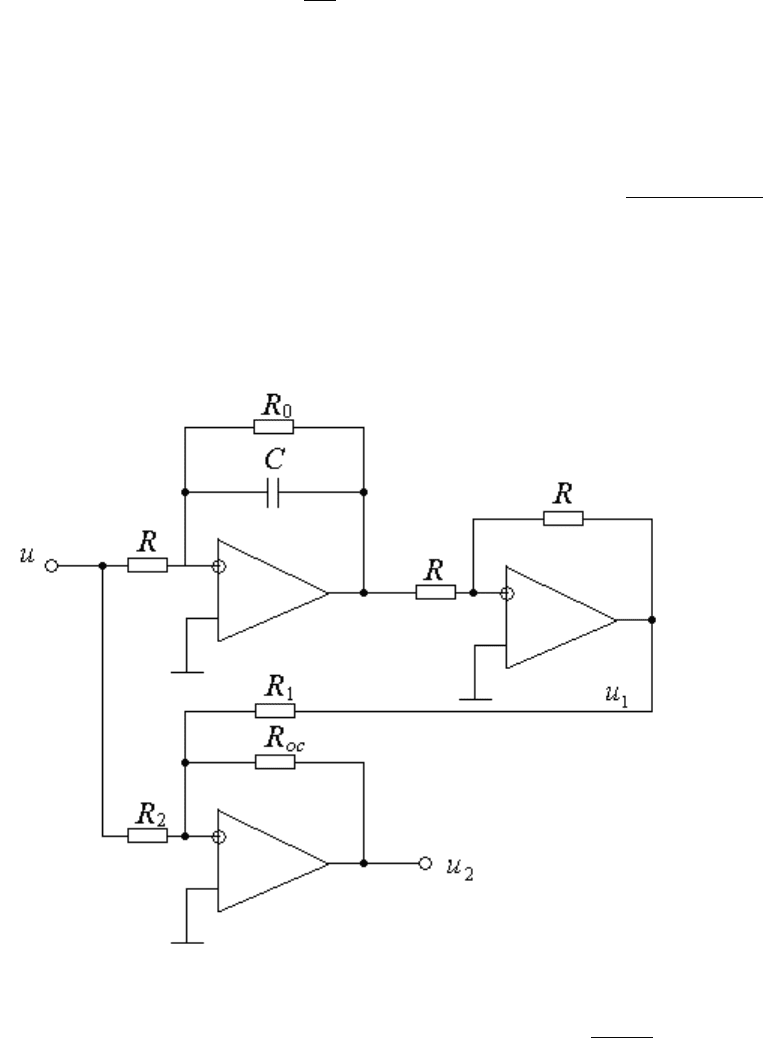
Используя модель пространства состояний, построим электронную схему для регу-
лятора
1
2
)(
1
+
+
−=
s
s
sW (см. рис. 3.14), где ukuku
2112 ΣΣ
+
=
,
1
1
R
R
k
oc
−=
Σ
и
2
2
R
R
k
oc
−=
Σ
1
−
.
Значения приведенных выше коэффициентов должны быть:
. Откуда
следует, что значения электронных элементов выбираются из соотношений:
21
==
ΣΣ
kk
1
211
0
==== CR
R
R
R
R
R
R
ococ
.
На базе электронных схем представленных на рис. 3.13 и рис. 3.14, построим
электронную схему всего регулятора (см. рис. 3.15). Выбираем значения емкостей
и сопротивлений таким образом, чтобы были выполнены следующие соотношения:
15
1
11
==
RC
k
p
;
====
22
433
0
RC
R
R
R
R
R
R
ococ
1;
36
15
5
6
=
R
R
.
Из приложения 3 выбираем следующие значения емкостей и сопротивлений:
мкФ, мкФ,
22.0
1
=C 1
2
=C 1
430
=
=
=
=
oc
RRRR МОм, 320
1
=
R кОм, 11
5
=
R кОм,
кОм. Тогда передаточная функция регулятора
160
6
=R
s
s5. +
sW
14
)(
2
=
2.14
, а при-
веденные на рис. 3.16 ЛАХ и ЛФХ разомкнутой системы показывают, что следящая
система удовлетворяет всем техническим требованиям.
Рис. 3.14. Электронная схема звена
1
2
)(
1
+
+
−=
p
p
pW
37

Рис. 3.15. Электронная схема регулятора
38

Рис. 3.16. ЛАХ и ЛФХ разомкнутой следящей системы
3.6. Исследование замкнутой системы управления
В предлагаемом разделе проведем моделирование замкнутой системы управле-
ния. Вычислительные эксперименты представлены на следующих рисунках.
Рис. 3.17. Построение процесса )(
t
y при 0)(),(1)( ==
∗
tftty
39

Рис. 3.18. Построение процессов ошибки )(
t
ε
и задающего сигнала ) при (ty
∗
0,)(
1
=
∗
ftaty )( =t
Рис. 3.19. Построение процессов ошибки )(
t
ε
и задающего сигнала ) при (ty
∗
0)(cos()( =ω=
∗
taty
yy
), ft
40