Бобцов А.А., Лямин А.В., Чежин М.С. Операторный метод анализа и синтеза линейных систем управления
Подождите немного. Документ загружается.


)]([)(
t
y
L
s
Y
=
к изображению входной переменной
)]([)(
t
u
L
s
U
=
при нулевых начальных условиях
)0()0()0()0()0()0(
11
yppuuyppyy
mn −−
======= KK .
Напомним, что преобразование Лапласа
∫
∞
−
==
0
)()]([)( dtetftfLsF
st
ставит в соответствие каждой функции )(
t
f
(оригиналу), для которой несобствен-
ный интеграл сходится, единственную функцию )(
s
F (изображение) комплексной
переменной
s
. Использование преобразования Лапласа для изучения дифференци-
альных уравнений основывается на утверждении:
)()]([ sFstfpL
kk
= ,
если равны нулю значения )(
t
f
и ее производных вплоть до ( )–ой при 1−k 0
=
t
.
Применяя преобразование Лапласа к правой и левой частям уравнения (2.1) при
нулевых начальных условиях, получим
)()()()(
s
U
s
b
s
Y
s
a
=
,
и, следовательно, передаточная функция -
)(
)(
)(
sa
sb
sW = . (2.3)
Передаточная функция у которой полиномы )(
s
a и )(
s
b не являются взаимно
простыми называется вырожденной передаточной функцией. При выводе переда-
точной функции )(
s
W системы необходимо следить за тем, чтобы не произошло со-
кращения ее числителя и знаменателя. При выполнении последнего условия, знаме-
натель )(
s
a передаточной функции называется характеристическим полиномом
системы. Устойчивость объекта управления определяется корнями характеристиче-
ского уравнения 0)(
=
s
a . Для асимптотической устойчивости необходимо и доста-
точно отрицательность вещественных частей всех корней. Любой полином, все кор-
11

ни которого имеют строго отрицательную вещественную часть, называется устой-
чивым полиномом.
Корни знаменателя передаточной функции называются полюсами, а корни числи-
теля - нулями. Передаточная функция, у которой вещественные части всех нулей от-
рицательны называется минимально-фазовой. Для существования решения задачи
управления достаточно, чтобы передаточная функция была минимально-фазовой.
Если )(
s
W не является минимально-фазовой передаточной функцией, то решение
задачи управления может существовать только при условии, что наибольшее общее
кратное полиномов )(
s
a и )(
s
b - устойчивый полином.
Если )(
s
W является минимально-фазовой передаточной функцией, то решение
задачи будем искать в два этапа. Для этого представим сигнал управления в виде
))((
210
uupWu
+
= , (2.4)
где
)(
)(
)(
0
0
0
pa
pb
pW = - дробно – рациональная функция. На первом этапе определим
алгоритм формирования переменной для того, чтобы решить задачу стабилиза-
ции, т.е. обеспечить выполнение предельного соотношения
при любых
начальных условиях. На втором этапе, выбором сигнала управления обеспечим ре-
шение задачи слежения, т.е. выполнение неравенства
, где -
функция времени такая, что
1
u
0)(lim =
∞→
ty
t
γ≤−
∗
|)() ty
∞
(| ty )(ty
∞
0)]()([lim
=
−
∞
∞→
tyty
t
,
)(ty
∗
- заранее неизвестная переменная величина (задающее воздействие), а 0>
γ
-
некоторое заданное постоянное число. Отметим, что определенная подобным обра-
зом функция )
называется установившейся реакцией системы.
(ty
∞
В заключении первого этапа курсовой работы строятся ЛАХ и ЛФХ передаточной
функции )(
s
W объекта управления. Напомним, что логарифмической амплитудно-
частотной характеристикой, соответствующей передаточной функции )(
s
W , назы-
вается график функции
|)(|lg20)(
ω
=
ω jW
L
12
от логарифма , где - действительная переменная, которая называется часто-
той. Функция ), которую получают из передаточной функции )
ωlg
( jW
ω
ω (
s
W при под-
становке в нее
ωj=
s
, называется частотной передаточной функцией. Принято
измерять значение ЛАХ в
децибелах (дБ), а значение наклона ЛАХ – в децибелах на
декаду
. Декадой называют интервал на котором частота
ω
меняется в 10 раз. Лога-
рифмической фазочастотной характеристикой называется график функции
)(arg)(
ω
=
ωϕ jW
от логарифма
lg . ω
2.2. Решение задачи стабилизации
Для решения задачи стабилизации выберем алгоритм формирования сигнала
в
виде
1
u
ypWu )(
11
−
=
, (2.5)
где
)(
)(
)(
1
1
1
pa
pb
p =W
. Подставляя (2.4), (2.5) в уравнение (2.2) и разрешая его относи-
тельно выходной переменной найдем уравнение замкнутой системы
2
)( upWy
y
=
, (2.6)
где
)()()()()()(
)()()(
)()()(1
)()(
)(
1010
10
10
0
pbpbpbpapapa
papbpb
pWpWpW
pWpW
pW
y
+
=
+
= . (2.7)
Для объектов управления с минимально-фазовыми передаточными функциями, по-
линомы )
выбирают из условия
(),(),(),(
1010
pbpbpapa
)(
1
)()()()()()(
)()()(
1010
10
papbpbpbpapapa
papbpb
y
=
+
, (2.8)
где )
- произвольный устойчивый полином степени
(
pa
y
mn
−
. Например, полином
можно выбрать следующим образом
)
p
(
a
y
mn
y
ppa
−
+= )1()( , (2.9)
13
а многочлены
-
)(),(),(),(
1010
pbpbpapa
0,0
2
2,0
1
1,00
)( apapapa
n
n
n
n
+++=
−
−
−
−
K ,
0,1
2
2,1
1
1,11
)( apapapa
n
n
n
n
+++=
−
−
−
−
K ,
0,0
2
2,0
1
1,00
)( bpbpbpb
n
n
n
n
+++=
−
−
−
−
K ,
0,1
2
2,1
1
1,11
)( bpbpbpb
n
n
n
n
+++=
−
−
−
−
K ,
где )4
неизвестных коэффициентов этих полиномов находятся из тождеств
1(
−n
1
01
)1()()(
−
+==
n
ppbpa , (2.10)
12
10
)1)(()()()()(
−−
+=+
mn
ppbpbpbpapa . (2.11)
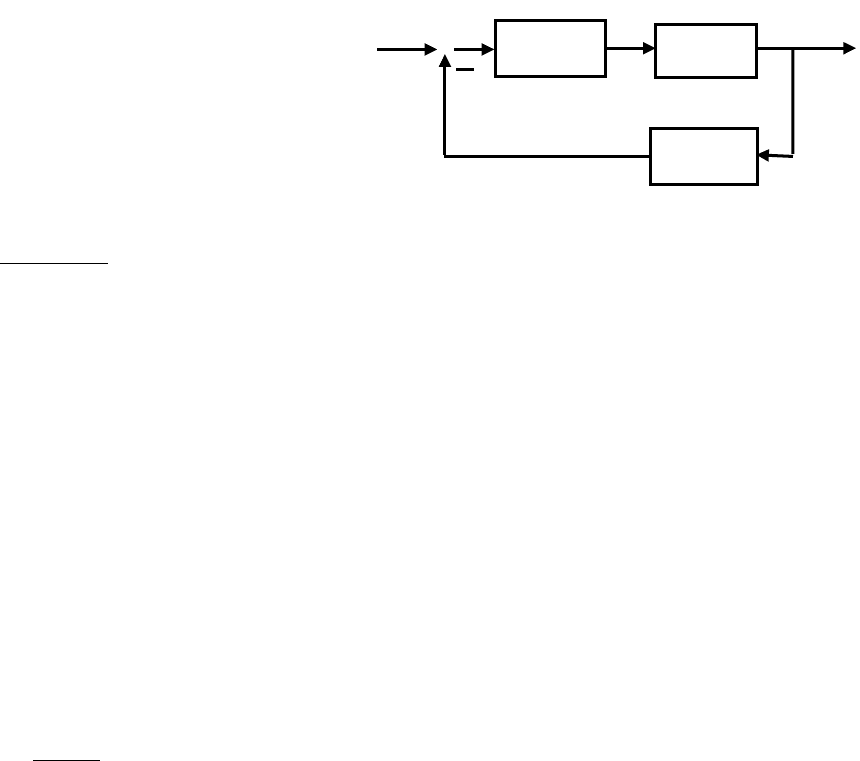
Таким образом, принимая во внимание
(2.7), (2.9)-(2.11), передаточная функ-
ция объекта управления охваченного
отрицательной обратной связью по вы-
ходу будет иметь вид
⊗
2
u
y
)( pW
)(
1
pW
)(
0
pW
1
u
Рис. 2.2. Структурная схема
системы
у
п
р
авления
mn
y
s
sW
−
+
=
)1(
1
)( , (2.12)
Структурная схема системы управления представлена на рис.2.2.
В заключении данного этапа строятся ЛАХ и ЛФХ передаточной функции
W .
)(
s
y
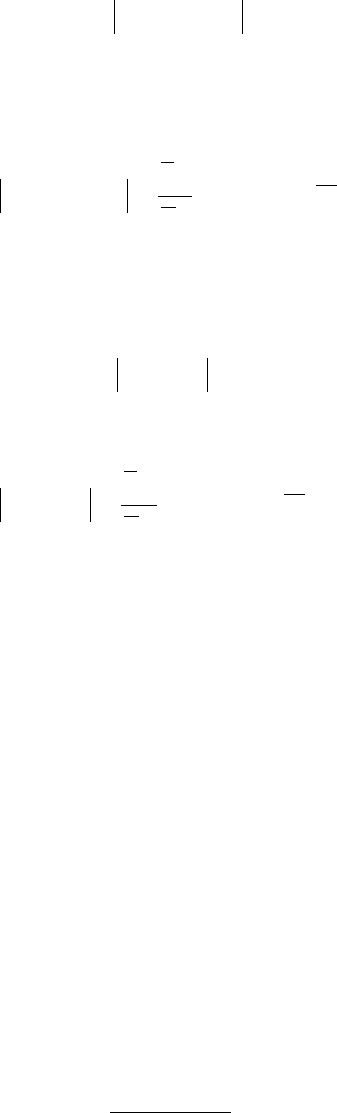
2.3. Синтез следящей системы управления
С учетом того, что измерения проводятся с помехами, управляющее воздействие
объектом (2.6) строится в форме:
ε
=
~
)(
22
pWu , (2.13)
где
)(
)(
)(
2
2
2
pa
pb
pW =
и )()()(*
~
tftfyty
−
ε
=
−
−=ε . Структурная схема системы
(2.2), (2.4), (2.5), (2.13) приведена на рис.2.3.
14

Задача этого этапа со-
стоит в выборе такой переда-
точной функции регулятора
, которая обеспечит бли-
зость ошибки управления
к нулю и
требуемые характеристики
замкнутой системы управле-
ния. Для решения этой задачи воспользуемся
методом динамической компенсации.
Используя уравнения (2.2), (2.4), (2.5) и (2.13) найдем выражение для ошибки
управления
)(
2
sW
)(
t =ε
)()(
tyty −
∗
2
u
1
u
u
⊗
Рис. 2.3. Структурная схема сле-
дящей системы
у
п
р
авления
y
⊗
*y
⊗
ε
ε
~
)( pW
)(
2
pW
)(
0
pW
)(
1
pW
f
)()()()](1[)(
tfpWtypWt
зз
+−=ε
∗
, (2.14)
где
)(1
)(
)(
pW
pW
pW
p
p
з
+
=
,
W
)()()(
2
pWpWp
yp
=
. (2.15)
Функция )
называется передаточной функцией замкнутой системы, а функция
- передаточной функцией разомкнутой системы.
(sW
з
)(sW
p
Выбор передаточной функции регулятора определяет вид передаточной функции
замкнутой системы. Простейший подход к выбору обратной связи заключается в
том, чтобы предъявить требования к самой )W
, к примеру, потребовать выполне-
ние условия
(s
з
)(1
)(
)()(
sW
sW
sWsW
p
p
зз
∗
∗
∗
+
== , (2.16)
где
)(
)(
)(
sa
sb
s
з
з
з
∗
∗
∗
=
W
и
)(
)(
)(
sa
sb
sW
p
p
p
∗
∗
∗
= - соответственно, желаемые передаточные функ-
ции замкнутой и разомкнутой системы, которые формируются на основе требований
к системе управления. Преобразуем требования, предъявленные в курсовой работе,
к замкнутой системе в условия на передаточную функцию замкнутой системы.
15

Требование к устойчивости замкнутой системы (a) означает, что все корни харак-
теристического полинома
)()()()()()]()()()()()([)(
20121010
sbsbsbsasasbsbsbsasasas
+
+=∆ (2.17)
замкнутой системы (2.2), (2.4), (2.5), (2.13) должны иметь строго отрицательную
вещественную часть.
Установившаяся ошибка, вызванная воздействием (1.1), равна
1
0
10
)](1[))](0(1[)( asW
ds
d
taaWt
s
зз
⋅−++−=ε
=
∞
. (2.18)
Ошибка может быть ограниченной при 0
1
≠
a , только если выполнено условие ас-
татизма
1)0(
=
з
W (2.19)
или
0)0(
1
=
−
p
W , (2.20)
но это возможно, только при условии, что передаточная функция разомкнутой сис-
темы имеет нулевой полюс. Если он простой, то справедливо представление
)(
~
)( sW
s
k
sW
p
p
p
= , 1)0(
~
=
p
W , (2.21)
где - коэффициент усиления разомкнутого контура. Тогда используя выражения
(2.15) и (2.21), найдем
p
k
1
0
)](1[
−
=
=−
p
s
з
ksW
ds
d
(2.22)
и, следовательно,
1
1
)( akt
p
−
∞
=ε . (2.23)
Таким образом, для выполнения требования (1.2) необходимо, чтобы коэффициент
удовлетворял условию
1
1
1
1
−
δ=
ε
≥
a
k
p
. (2.24)
Установившаяся ошибка, вызванная воздействием (1.3), является гармонической
функцией с амплитудой
16
yзy
ajW )(1
ω
−
=
ε , (2.25)
где
- частота воздействия. Таким образом, для удовлетворения требования (1.4)
необходимо, чтобы
ω
y
y
y
з
a
jW δ=
ε
≤ω− )(1
,
y
ω
≤
ω
. (2.26)
Установившаяся ошибка вызванная воздействием (1.5), является гармонической
функцией с амплитудой
fзf
ajW )(
ω
=
ε . (2.27)
Таким образом, для удовлетворения требования (1.7) необходимо, чтобы
f
f
f
з
a
jW δ=
ε
≤ω)(
,
f
ω
≥
ω
. (2.28)
Если передаточная функция объекта управления является минимально-фазовой и
устойчивой, то для построения желаемой передаточной функции замкнутой систе-
мы, удовлетворяющей выше перечисленным условиям часто прибегают к методу
основанному на соответствии между логарифмическими частотными характеристи-
ками разомкнутой системы и ее статическими и динамическими свойствами в замк-
нутом состоянии.
Явные зависимости )(ω
L
, достаточно сложны. Поэтому часто ограничива-
ются построением асимптотических логарифмических частотных характеристик.
Для примера рассмотрим произвольную минимально-фазовую передаточную функ-
цию с вещественными нулями и полюсами
)(ωϕ
∏
∏
+
′′
+
′
=
ν−
i
i
i
i
sT
sT
kssW
)1(
)1(
)( , (2.29)
где
k
- положительный коэффициент усиления,
i
T
′
,
i
T
′
′
- положительные постоян-
ные времени,. - натуральное число (порядок астатизма). Тогда соответствующие
ЛАХ и ЛФХ даются формулами
ν
∑∑
+ω
′′
−+ω
′
+ων−=ω
i
i
i
i
TTkL ]1)lg[(20]1)lg[(20lg20lg20)(
22
, (2.30)
17

∑∑
ω
′′
−ω
′
+
π
ν=ωϕ
i
i
i
i
TT )arctg()arctg(
2
)(
. (2.31)
Асимптотическая ЛАХ есть кусочно-линейная функция, получаемая заменой в
(29) членов 20
на
]1)lg[(
2
+ωT
≥ωω
≤ω
,
1
,lg20
,
1
,0
T
T
T
где частота
T
1
=ω называется сопрягающей.
Асимптотическая ЛФХ есть кусочно-постоянная функция, получаемая заменой в
(30) членов arctg( )ω
T
на
≥ω
π
≤ω
.
1
,
2
,
1
,0
T
T
Нетрудно заметить, что для систем с передаточной функцией вида (2.29) по асим-
птотической ЛАХ можно восстановить асимптотическую ЛФХ и саму передаточ-
ную функцию. Данное свойство характерно для любой передаточной функции, не
имеющей нулей и полюсов в правой полуплоскости.
Преобразуем требования к замкнутой системе в ограничения на свойства лога-
рифмической амплитудной характеристики разомкнутой системы. Условие (2.21) на
отработку линейно растущего задающего воздействия сводятся к ограничению на
поведение )W
при низких частотах, близких
( ωj
p
0
=
ω
:
ω
≈ω
j
k
jW
p
p
)( (2.32)
и, следовательно,
ω−=ω=ω lg20lg20)(lg20)(
ppp
kjWL . (2.33)
Иначе говоря, низкочастотная асимптота )(
ω
p
L должна иметь наклон -20 дБ/дек,
причем в силу (2.24) ее уровень определяется условием
18
1
lg20lg20
δ
−
≥
p
k . (2.34)
Условия (2.26), (2.28) при достаточно малых
y
δ
,
f
δ
можно заменить на
1
)(
−
δ≥ω
yp
jW ,
y
ω
≤
ω
, (2.35)
fp
jW δ≤ω)( ,
f
ω
≥
ω
(2.36)
и, следовательно,
ypp
jWL δ−≥ω=ω lg20)(lg20)( ,
y
ω
≤
ω
, (2.37)
fpp
jWL δ≤ω=ω lg20)(lg20)( ,
f
ω
≥
ω
. (2.38)
Условие (2.37) задает ограничение на поведение логарифмической амплитудной
частотной характеристики в области низких частот, а условие (2.38) - в высокочас-
тотной области.
Поведение ЛАХ в области средних частот определяет запасы устойчивости по фа-
зе и амплитуде и в значительной мере качество системы в переходном режиме (вре-
мя переходного процесса и перерегулирование). Для обеспечения приемлемых запа-
сов устойчивости наклон ЛАХ на частоте
c
ω
такой, что 0)( =
ω
cp
L
c
ω
обычно выбира-
ется равным -20 дБ/дек, причем длительность этого участка должна быть не менее
декады, что соответствует изменению частоты в 10 раз. Частота
называется час-
тотой среза. Значение частоты среза надо выбирать наиболее большим из всех воз-
можных для того, чтобы увеличить быстродействие замкнутой системы.
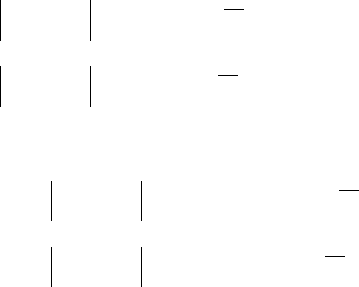
Итак, все требования, которые были сформулированы в задании курсовой роботы,
сведены к ограничениям на допустимое поведение ЛАХ разомкнутой системы (см.
рис. 2.4, где заштрихованы границы зон, в которые не может заходить ЛАХ). Оста-
ется подобрать передаточную функцию разомкнутого контура )
, для которой
эти ограничения выполнены. Если )
минимально-фазовая передаточная функ-
ция, то вначале строят асимптотическую ЛАХ, удовлетворяющую всем ограничени-
ем, а затем по ней находят саму W .
(sW
p
∗
(sW
p
∗
)(s
p
∗
Приведем в готовом виде сводку допустимых передаточных функций разомкну-
той системы:
19

-20 дБ/дек
-20 дБ/дек
1
lgδ
−
c
ω
lg
f
δlg20
y
δ− lg20
p
klg20
y
ω
lg
f
ω
lg
Рис. 2.4. Ограничения на допустимое поведение ЛАХ
ωlg
)(ω
p
L
1) Пусть
y
y
ff
ω
δ
≤δ≤
ωδ
1
1
. (2.39)
Тогда передаточная функция
s
k
sW
p
p
=
∗
)(,
ffp
k
ω
δ
=
(2.40)
удовлетворяет всем ограничениям. При тех же условиях допустима, но требует
меньшего усиления на частотах
y
ω
≥
ω
и обеспечивает лучшее подавление помех
передаточная функция вида
)1)(1(
)1(
)(
31
2
++
+
=
∗
sTsTs
sTk
sW
p
p
, (2.41)
где
1
1
−
δ=
p
k ,
2
1
1
y
y
ωδ
δ
=
T
,
y
y
ω
µδ
=
2
T , T
23
1.0 T
≈
, (2.42)
а параметр
, характеризующий расположение частоты среза , может вы-
бираться в пределах 2
÷4.
µ
2
/ T
c
µ=ω
2) Пусть
y
y
ω
δ
≤δ
1
,
ff
ωδ
<δ
1
1
. (2.43)
20