Benzoni-Gavage S., Serre D. Multi-dimensional Hyperbolic Partial Differential Equations: First-order Systems and Applications
Подождите немного. Документ загружается.

Local uniqueness and finite-speed propagation 75
in ∂L. Hence we have
γ
K
u
2
≤ C
H
u
2
+
L
u
2
,
where C =max
L
(S
0
+
α
S
0
A
α
, R). By the multidimensional Gronwall’s
Lemma (see Lemma A.3 in Appendix A) we conclude that there exists C
(independent of u)sothat
K
u
2
≤ C
H
u
2
.
If u|
H
≡ 0 then clearly u|
K
≡ 0.
Proof of i) The proof relies on a change of variables, transforming H into the
hyperplane {t =0} and preserving constant hyperbolicity, and on the Holmgrem
principle applied to the new (Cauchy) problem. We consider a local diffeomor-
phism χ such that χ(x
0
,t
0
)=(0, 0) and
H := χ(H)={(x,
t);
t =0}.
In particular, ∇
(x,t)
t is parallel to n. We can even choose χ so that
∂
t
t = n
0
,∂
α
t = n
α
.
The transformed operator
L under χ is defined by
(
Lv)(x,
t)=L(v ◦ χ)(x, t).
More specifically, it reads
L =
A
0
∂
t
+
α
A
α
∂
x
α
−
B,
where
A
0
(x,
t)=n
0
I
n
+
β
n
β
A
β
(x, t) ,
A
α
(x,
t)=∂
t
x
α
I
n
+
β
(∂
x
β
x
α
)A
β
(x, t)
and
B(x,
t)=B(x, t). Note that
A
0
(0, 0) is an invertible matrix since n(x
0
,t
0
) ∈
char(x
0
,t
0
). Furthermore, we have
τ
A
0
(x,
t)+
A(x,
t,
ξ)=(τn
0
+ λ ) I
n
+ A(x, t, ξ + τν), (2.2.20)
where ν =(n
1
, ···,n
d
)and
λ =
ξ · ∂
t
x, ξ =
β
ξ
β
∇
x
x
β
.
Observing that
(ξ,λ)=(
ξ,0) dχ(x, t)andn =(ν, n
0
)=(0, 1) dχ(x, t),

76 Linear Cauchy problem with variable coefficients
we see that (ξ,λ)and(ν, n
0
) are not parallel, unless
ξ = 0. By assumption, either
n(x
0
,t
0
)or−n(x
0
,t
0
) belongs to Γ(x
0
,t
0
). Then we know from Theorem 1.5 of
Chapter 1 that the operator is constantly hyperbolic in the direction n,which
means that for all (ξ, λ) not parallel to n =(ν, n
0
), the roots σ of the polynomial
det(A(x
0
,t
0
,ξ+ σν)+(λ + σn
0
)I
n
)
are real with constant multiplicities. Because of (2.2.20) this shows that the roots
τ of
det( τ
A
0
(0, 0) +
A(0, 0,
ξ, τ ))
are real with constant multiplicities for
ξ = 0. This means that the transformed
operator
L is constantly hyperbolic at point (0, 0), and thus also in the neigh-
bourhood of (0, 0). Up to replacing
A
α
(x, t)by
A
α
( θ((x, t))(x, t) ) for all
α ∈{0, ···,d},whereθ is a smooth cut-off function, we can assume that
L
is globally defined, constantly hyperbolic, and has constant coefficients outside
some bounded ball. So we are led to show the result for
L instead of L,and
H := {(x,
t);
t =0} instead of H.
From now on we drop the tildas. The (hyperbolic system associated with)
operator L
∗
meets the assumptions of Theorem 2.3. Thus Theorem 2.6 applies
to L
∗
. This will enable us to apply the Holmgren principle to L.
We must show the existence of a neighbourhood N of (0, 0) such that
if u is a C
1
solution of Lu =0 in N and u(x, 0) = 0 for (x, 0) ∈ N then
u(x, t) = 0 for all (x, t) ∈ N . Without loss of generality, we can consider a conical
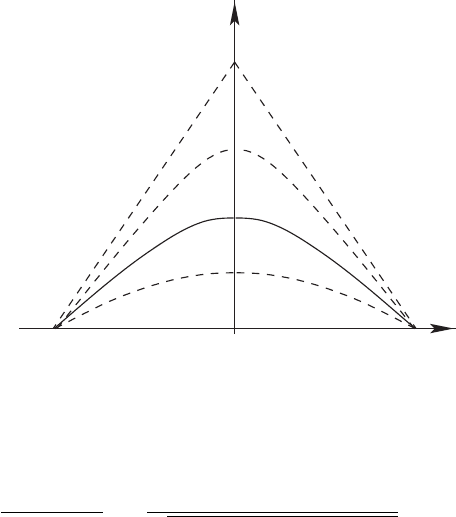
neighbourhood N , foliated by the hypersurfaces with boundary
H
θ
:= {(x, t); θ
3
x
2
− V
2
( t − θT )
2
+ θ
2
V
2
T
2
(1 − θ)=0,
0 ≤ t ≤ θT, x≤VT},θ∈ [0, 1) .
(The reader may refer to Fig. 2.3.) Choosing
V =max{|λ
j
(x, t, ξ)|; ξ =1},
where λ
j
(x, t, ξ) denote, as usual, the eigenvalues of A(x, t, ξ) (recall that
A(x, t, ξ) has been modified to be independent of (x, t) outside a bounded ball), it
is not difficult to show that all the hypersurfaces H
θ
are space-like, as H
0
⊂H.
To be precise, one can compute that a unit normal vector to H
θ
at point
(x, t)readsn =(ν, n
0
)=
N/
N where
N := ( θ
3
x, V
2
(θT − t) ). And thus the
matrix (A(x, t, ν)+n
0
I
n
) has eigenvalues
µ
j
=
1
N
V
2
(θT − t)+λ
j
(x, t, θ
3
x)
.
By definition of V ,wehave
|λ
j
(x, t, θ
3
x)|≤Vθ
3
x,
Local uniqueness and finite-speed propagation 77
H
θ
H
0
T
V T
t
x
Figure 2.3: Foliation of a conical neighbourhood N of (0, 0)
and thus
λ
j
(x, t, θ
3
x)
V
2
(θT − t)
≤
θ
3
x
θ
3
x
2
+ θ
2
V
2
T
2
(1 − θ)
< 1onH
θ
.
This proves that µ
j
> 0 and thus n belongs to −Γ. Therefore, H
θ
is space-like.
Now, similarly as in the first part of the proof, we can transform by change
of variable the problem
L
∗
ϕ =0,
ϕ|
H
θ
= g
(2.2.21)
for g ∈ D (H
θ
) into a standard Cauchy problem
&
L
∗
ϕ =0,
ϕ|
t=0
= g,
with
&
L
∗
being constantly hyperbolic and having constant coefficients outside a
bounded ball. So by Theorems 2.3 and 2.6 the problem (2.2.21) admits a unique
smooth solution ϕ. Now, denoting by L
θ
the lens lying in between H
θ
and H
0
,
we have for all C
1
solution u of Lu =0inN
0=
L
θ
(ϕ, Lu) −
L
θ
(L
∗
ϕ, u)=
H
θ
(g, (n
0
+
α
n
α
A
α
) u) −
H
0
(ϕ, u),
78 Linear Cauchy problem with variable coefficients
where n =(n
1
, ···,n
d
,n
0
) denotes the normal vector to H
θ
.Thusifu(x, 0) = 0
for all (x, 0) ∈ N we see that
H
θ
( g, (n
0
+
α
n
α
A
α
) u )=0.
Since this holds for any g this implies that
(n
0
+
α
n
α
A
α
) u ≡ 0
on H
θ
. But the matrix (n
0
+
α
n
α
A
α
) is known to be invertible since n does
not belong to the characteristic cone. Finally, this shows that u ≡ 0onH
θ
for
all θ.
Theorem 2.10 has a counterpart/consequence in terms of finite-speed propa-
gation, which is as follows.
Theorem 2.11
i) We assume that the system (2.0.1) is constantly hyperbolic and has
constant coefficients outside a compact set. We also take f ≡ 0,andset
V =max{|λ
j
(x, t, ξ)|; ξ =1},
with λ
j
(x, t, ξ) the eigenvalues of A(x, t, ξ). To any point (X, T) ∈ R
d
×
(0, +∞) we associate the conical set
C :=
0<t<T
Ω(t) ×{t} with Ω(t):={x ; x − X <V(T − t) },
0 ≤ t<T.
If u ∈ C
1
([0,T]; H
s
) is a (weak) solution of (2.0.1) (with s ∈ R) such that
u|
Ω(0)
=0, then u|
C
=0.
ii) Assuming that the system (2.0.1) is Friedrichs symmetrizable (and still
f ≡ 0), the same result holds on changing the balls Ω(t) to the convex sets
Ω(t):=
'
ξ=1
{x ; v(ξ)(t − T )+ξ · (x − X) ≤ 0 },
where
v(ξ):=max
(x,t)
max {v ∈ R ;(ξ,v) ∈ char(x, t) }.
Proof i) We first show the result for u ∈ C
1
(R
d
× [0,T]) a smooth solution.
The proof is based on a connectedness argument using Theorem 2.10 i).Wetake
ε ∈ (0,T) and define T
ε
= T −ε,
C
ε
:= {x ;0<t<T
ε
, x − X <V(T
ε
− t) }.
Local uniqueness and finite-speed propagation 79
Similarly as in the proof of Theorem 2.10 i), we can construct space-like surfaces
H
ε
θ
, depending smoothly on θ, such that
C
ε
=
θ∈(0,1)
H
ε
θ
and H
ε
0
⊂ Ω(0).
Then, if u ∈ C
1
(R
d
× [0,T]) is the solution of (2.0.1) and u|
Ω(0)
=0,theset
Θ:={θ ∈ [0, 1) ; u|
H
θ
≡ 0 }
of course contains 0, and is a closed subset of [0, 1) by a continuity argument.
But, covering the compact sets H
θ
by a finite number of neighbourhoods N ,
Theorem 2.10 i) also shows that Θ is open. Therefore, we have Θ = [0, 1), which
means that u ≡ 0onC
ε
=
(
0<t<T
ε
Ω(t) ×{t}.
In general, we can proceed by regularization. Setting f := Lu and g := u|
t=0
,
we have by assumption that f =0in
(
0<t<T
Ω(t)andg = 0 in Ω(0). Introducing
a mollifier ρ
k
in R
d
, the Cauchy problem
Lv = f ∗ ρ
k
,v|
t=0
= g ∗ ρ
k
,
has a unique solution v = u
k
, which is in C
1
(R
d
× [0,T]) by Theorem 2.6. For
k large enough, we have f ∗ρ
k
=0inC
ε
and g ∗ ρ
k
=0inH
ε
0
(with the same
notations as before). We thus infer that, for k large enough, u
k
=0inC
ε
by the
first part of the proof. But the energy estimate in (2.1.14) shows that
u
k
C ([0,T ];H
s
)
−−−−−−−−→
n→∞
u,
since
Lu
k
= f ∗ρ
k
C ([0,T ];H
s
)
−−−−−−−−→
k→∞
f = Lu and u
k
|
t=0
= g ∗ ρ
k
H
s
−−−−→
n→∞
g = u|
t=0
.
Passing to the limit, we conclude that u =0inC
ε
.
ii) The proof is a natural generalization of Section 1.3.1. It is roughly the
same as in Theorem 2.10 ii), except that we are going to consider lenses L that
are only weakly space-like. Let us consider
L
ε
:=
0≤s≤T −ε
Ω(s) ×{s}.
The boundary of L
ε
is made of three parts, the bottom T =Ω(0)×{0}, the top
T
ε
=Ω(T −ε) ×{T − ε}, and the side S. The top and bottom are obviously
space-like. As regards the side, for all (y, s) ∈S, there exists ξ
0
such that
{(x, t);v(ξ
0
)(t − T )+ξ
0
· (x − X)=0}
is a hyperplane of support for L
ε
at point (y, s). A normal vector to L
ε
at point
(y, s) is necessarily of the form n =(ξ
0
,v
0
;=v(ξ
0
)). By definition of v(ξ), we
know that v
0
is not smaller than any v such that the matrix vI
n
+ A(y, s,ξ
0
)
is singular. Therefore, all the eigenvalues of v
0
I
n
+ A(y, s,ξ
0
) are non-negative.

80 Linear Cauchy problem with variable coefficients
This implies in particular that the symmetric matrix S
0
(y, s)(v
0
I
n
+ A(y, s,ξ
0
))
is non-negative. Therefore, integrating by parts the identity
L
ε
∂
t
(S
0
u, u)+
L
ε
α
∂
α
(S
0
A
α
u, u)=
L
ε
(Ru, u),
(with the same notations as in the proof of Theorem 2.10ii)), we get
0 ≥
T
ε
(S
0
u, u)+
L
ε
(Ru, u),
if u vanishes on the bottom. Then by the Cauchy–Schwarz inequality and the
definiteness of S
0
, there exists α>0 such that
T
ε
u
2
≤ α
L
ε
u
2
.
Since this holds for all ε ∈ (0,T], we can conclude by the Gronwall Lemma.
2.3 Non-decaying infinitely smooth data
As a consequence of Theorem 2.11, we have that, under either one of the
assumptions, the Cauchy problem can be uniquely solved for any smooth data,
without any assumption on their far-field behaviour.
Theorem 2.12 We assume that the system (2.0.1) is either constantly hyper-
bolic with constant coefficients outside a compact set, or Friedrichs symmetriz-
able. Then, for f ∈ C
∞
(R
d
× [0,T]) and g ∈ C
∞
(R
d
), there exists a unique
u ∈ C
∞
(R
d
× [0,T]) such that
Lu = f and u|
t=0
= g.
Proof Uniqueness directly follows from Theorem 2.11. Existence is based on
truncation of f and g. We take a smooth cut-off function θ and define
f
k
(x, t)=θ
x
k
f(x, t) ,g
k
(x, t)=θ
x
k
g(x, t)
for all positive integers k. To fix the ideas, we assume that θ ≡ 1 on the unit
ball. By Theorem 2.6, there exists a unique solution u
k
∈ C
∞
([0,T]; H
+∞
)of
the Cauchy problem
Lu
k
= f
k
,u
k
|
t=0
= g
k
.
Furthermore, Theorem 2.11 shows that u
k
is compactly supported, and that u
k
coincides with u
m
for all m ≥ k>VT on the cylinder {x≤k − VT}×[0,T].
Therefore, the sequence (u
k
) is convergent in C
∞
(R
d
× [0,T]) and the limit solves
the Cauchy problem
Lu = f, u|
t=0
= g.
Weighted in time estimates 81
2.4 Weighted in time estimates
We conclude this chapter by an estimate that will be useful in Chapter 9. It does
not actually deal with the Cauchy problem. It gives global in time exponentially
weighted estimates. The important feature of these estimates is that the weight
depends on a parameter, denoted by γ, which has to be chosen large enough for
the estimate to hold. This gives the flavour of the machinery that will be used
in Chapter 9 for the resolution of Initial Boundary Value Problems.
Theorem 2.13 We assume that the system (2.0.1) is symmetrizable with
uniform bounds on Σ(t) (including the lower bound α>0 in (2.1.6))andon
dΣ/dt for t ∈ R. We also assume that the matrix B is uniformly bounded on
R
d+1
. Then there exist C>0 and γ
0
> 0 so that for u ∈ D (R
d+1
) and γ ≥ γ
0
we have
γ
R
e
−2γt
u(t)
2
L
2
(R
d
)
dt
1/2
≤ C
R
e
−2γt
Lu(t)
2
L
2
(R
d
)
dt
1/2
.
(2.4.22)
Remark 2.11 According to Theorem 2.2, this result applies in particular to
systems admitting a symbolic symmetrizer (see Definition 2.3) with bounds valid
for all t ∈ R.
Proof Elementary calculus yields
d
dt
)
e
−2γt
Σ u, u
*
=e
−2γt
(2Re Σ Lu, u +2ReΣ Pu,u
+
dΣ
dt
u, u−2γ Σ u, u)
for all γ. Then, integrating on R and estimating all terms by the Cauchy–Schwarz
inequality, we obtain a constant C
1
(depending on α and bounds for Σ, dΣ/dt
and Re (ΣP )) such that
γ
R
e
−2γt
u(t)
2
L
2
(R
d
))
dt ≤ C
1
R
e
−2γt
u(t)
2
L
2
(R
d
)
dt
+ C
1
R
e
−2γt
u(t)
2
L
2
(R
d
))
dt
1/2
R
e
−2γt
Lu(t)
2
L
2
(R
d
)
dt
1/2
for all γ>0. This implies that
γ
R
e
−2γt
u(t)
2
L
2
(R
d
)
dt ≤ C
1
(1 + εγ)
R
e
−2γt
u(t)
2
L
2
(R
d
)
dt
+
1
4εγ
R
e
−2γt
Lu(t)
2
L
2
(R
d
)
dt
for any ε>0. Choosing for instance ε =1/(3C
1
) yields the desired estimate
with γ
0
=3C
1
and C =3C
1
/2.
This page intentionally left blank
PART II
THE LINEAR INITIAL BOUNDARY
VALUE PROBLEM
This page intentionally left blank