Benzoni-Gavage S., Serre D. Multi-dimensional Hyperbolic Partial Differential Equations: First-order Systems and Applications
Подождите немного. Документ загружается.

Well-posedness in Sobolev spaces 65
Existence in C ([0,T]; H
s−1
) We note that the adjoint operator
L
∗
= −∂
t
−
α
A
α
(x, t)
T
∂
α
−
α
∂
α
A
α
(x, t)
T
− B
T
(or its opposite, to fit with the standard time evolution) is also symmetrizable.
As a matter of fact, Σ(t)
−1
is a functional symmetrizer for P (t)
∗
. In particular,
the estimate (2.1.9) in Remark 2.1 can be applied to L
∗
. Now we introduce the
space
E := {ϕ ∈ C
∞
([0,T]; H
+∞
(R
d
)) ; ϕ(T )=0}.
Applying (2.1.9) to −s (where s is the regularity index of the source term f)and
L
∗
instead of L yields the estimate
ϕ(t)
2
H
−s
≤ C
T
0
L
∗
ϕ(τ)
2
H
−s
dτ (2.1.15)
for all ϕ ∈ E and t ∈ [0,T]. Hence the operator L
∗
restricted to E is one-to-one.
This enables us to define a unique linear form on L
∗
E by
(L
∗
ϕ)=
T
0
f(t) ,ϕ(t)
H
s
,H
−s
dt + g, ϕ(0)
H
s
,H
−s
. (2.1.16)
By (2.1.15) and the Cauchy–Schwarz inequality, we see that
(L
∗
ϕ)
2
≤ 2 C ( T f
2
L
2
(0,T ;H
s
)
+ g
2
H
s
) L
∗
ϕ
2
L
2
(0,T ;H
−s
)
.
By the Hahn–Banach theorem, thus extends to a continuous form
on L
2
(0,T; H
−s
). And by the Riesz theorem, we find u ∈ L
2
(0,T; H
s
)=
L
2
(0,T; H
−s
)
such that
(L
∗
ϕ)=
T
0
u(t) ,L
∗
ϕ(t)
H
s
,H
−s
dt (2.1.17)
for all ϕ ∈ E . In particular, for ϕ ∈ D (R
d
× (0,T)) we get that
T
0
f(t) ,ϕ(t)
H
s
,H
−s
dt =
T
0
Lu(t) ,ϕ(t)
H
s
,H
−s
dt.
In other words, we have Lu = f in the sense of distributions. This implies that
∂
t
u = P (t)u + f belongs to L
2
(0,T; H
s−1
), hence u belongs to C ([0,T]; H
s−1
).
Finally, integrating by parts in (2.1.17), substituting Lu = f and using (2.1.16),
we obtain
g, ϕ(0)
H
s
,H
−s
= u(0) ,ϕ(0)
H
s−1
,H
−s+1
for all ϕ ∈ D (R
d
× [0,T)). A standard argument then shows that u(0) = g.

66 Linear Cauchy problem with variable coefficients
Regularity If f belongs to C
∞
([0,T]; H
+∞
(R
d
)) and g belongs to H
+∞
(R
d
)
then u belongs to C ([0,T]; H
+∞
(R
d
)) from the above construction applied to
arbitrary large s. The equation ∂
t
u = P (t)u + f then implies that u belongs
to C
k
([0,T]; H
+∞
(R
d
)) for all k ∈ N.Iff and g are less regular, we can use
mollifiers to construct sequences f
k
∈ D (R
d
× [0,T]) and g
k
∈ D (R
d
) such that
f
k
L
2
(0,T ;H
s
)
−−−−−−−→
k→∞
f, g
k
H
s
−−−−→
k→∞
g.
For all k there is a solution u
k
∈ C
∞
([0,T]; H
+∞
(R
d
)) corresponding to the
source term f
k
and the initial data g
k
. Applying the estimate in (2.1.8) to u
k
−
u
m
yields the inequality
u
k
(t) − u
m
(t)
2
H
s
≤ C
g
k
− g
m
2
H
s
+
t
0
f
k
− f
m
(τ)
2
H
s
dτ
for all k, m ∈ N.Thisimpliesthat(u
k
) is a Cauchy sequence in C ([0,T]; H
s
)
and thus converges, say towards u ∈ C ([0,T]; H
s
). In the limit we have Lu = f
and u(0) = g. By uniqueness (in C ([0,T]; H
s−1
)), we have u = u, the solution
constructed by a duality argument. Observe then that u = u satisfies the energy
estimate in (2.1.14) by passing to the limit in (2.1.8) applied to u
k
. This completes
the proof.
Remark 2.8 The end of this proof is sometimes referred to as a weak=strong
argument. Indeed, if we say a strong solution is a solution that is the limit of
infinitely smooth solutions of regularized problems, and a weak solution the one
obtained by duality, it shows that any weak solution is necessarily a strong one.
Remark 2.9 This theorem is also valid backward, that is, prescribing u(T )
instead of u(0). This fact will be used in the application of the Holmgren Principle
below.
Remark 2.10 In the proof above, we have crucially used the infinite smooth-
ness of coefficients. In fact, H
s
-well-posedness is also true for H
s
coefficients
provided that s is large enough. We reproduce from [132] the corresponding
precise result below, which is the continuation of Theorem 2.4 and is useful in
non-linear analysis.
Theorem 2.7 Assume s>
d
2
+1 and take T>0. For a function v belonging
to L
∞
([0,T]; H
s
(R
d
)) ∩ C ([0,T]; H
s
w
(R
d
)) and such that
∂
t
v ∈ L
∞
([0,T]; H
s−1
(R
d
)) ∩ C ([0,T]; H
s−1
w
(R
d
)),
we consider the differential operator
L
v
= ∂
t
+
α
A
α
(v(x, t)) ∂
α
,
where the n × n matrices A
α
are C
∞
functions of their argument v ∈ R
n
.

Well-posedness in Sobolev spaces 67
If A(v, ξ)=
α
A
α
(v)ξ
α
admits a symbolic symmetrizer, then for all
f ∈ L
∞
([0,T]; H
s
(R
d
)) ∩ C ([0,T]; H
s
w
(R
d
)) and g ∈ H
s
(R
d
),
the Cauchy problem
L
v
u = f, u(0) = g
has a unique solution u ∈ L
2
([0,T]; H
s
(R
d
)). Furthermore, u belongs to
C ([0,T]; H
s
(R
d
)) and enjoys an estimate
u(t)
2
H
s
≤ K e
γt
u(0)
2
H
s
+ C
t
0
e
γ(t−τ)
L
v
u(τ)
2
H
s
dτ,
where K>0 depends boundedly on v
L
∞
([0,T ];W
1,∞
(R
d
))
and C, γ depend bound-
edly on
sup
v
L
∞
([0,T ];H
s
(R
d
))
, ∂
t
v
L
∞
([0,T ];H
s−1
(R
d
))
.
Sketch of proof As for Theorem 2.6, the existence part of the proof uses the
adjoint operator
L
∗
v
= −∂
t
−
α
∂
α
(A
α
(v))
T
of L
v
and energy estimates in the space of negative index H
−s
. The existence of a
symmetrizer for L
∗
v
,namelyS
−1
, is of course crucial to derive those estimates. By
Theorem 2.4 it does imply an energy estimate, though a priori only in H
m
with
m>
d
2
+ 1. However, as already observed in Remark 2.3, the only place where
the proof of Theorem 2.4 makes use of the restriction on m is in the comparison
between L
∗
v
and
P
∗
v
= −∂
t
−
α
∂
α
T
(A
α
(v))
∗
.
If we invoke Proposition C.15, which shows that
(L
∗
v
− P
∗
v
) φ
H
−s
≤ C(v
H
s
) φ
H
−s
for all φ ∈ C
∞
0
(R
d
× [0,T]), and perform the estimate of φ
H
−s
in terms of
P
∗
v
φ
H
−s
as in the proof of Theorem 2.4, we eventually obtain
φ(t)
2
H
−s
≤ K e
γt
φ(0)
2
H
−s
+ C
t
0
e
γ(t−τ)
L
v
φ(τ)
2
H
−s
dτ
for all φ ∈ D (R
d
× [0,T]). Once we have this estimate, the same arguments
as in the proof of Theorem 2.6 show the existence of a solution u ∈
L
2
([0,T],H
s
). Using the equation L
v
u = f , we see that additionally u ∈
H
1
([0,T]; H
s−1
(R
d
)) → C ([0,T]; H
s−1
(R
d
)).
The rest of the proof consists in showing more regularity on u.Thiscan
be done thanks to the estimate in Theorem 2.4 for m = s and a weak-strong
68 Linear Cauchy problem with variable coefficients
argument, the latter being also used to prove u satisfies the H
s
energy estimate
(hence its uniqueness). See [132] for more details. (Also see the proof of Theorem
2.8 hereafter for a similar method in L
2
.)
Theorem 2.7 deals with smooth solutions. There is also a L
2
-well-posedness
result for Lipschitz coefficients, relying on the energy estimate (2.1.12) in Theo-
rem 2.5, which can be stated as follows.
Theorem 2.8 Let v belong to W
1,∞
(R
d
× (0,T)), and consider the operator
L
v
= ∂
t
+
α
A
α
(v(x, t)) ∂
α
,
where A
α
are C
∞
functions of their argument v ∈ R
n
and A(v, ξ)=
α
ξ
α
A
α
(v) admits a symbolic symmetrizer. Then for all f ∈ L
2
(R
d
× (0,T))
and g ∈ L
2
(R
d
), the Cauchy problem
L
v
u = f, u(0) = g
has a unique solution u ∈ C ([0,T]; L
2
(R
d
)), which enjoys the estimate
u(t)
2
L
2
≤ K
e
γt
u(0)
2
L
2
+
t
0
e
γ(t−τ)
f(τ)
2
L
2
dτ
,
where K>0 and γ>0 depend boundedly on v
W
1,∞
(R
d
)
.
Proof Using the energy estimate (2.1.12) in Theorem 2.5, we can find a weak
solution u ∈ L
2
([0,T]; L
2
(R
d
)) by the same duality argument as in the proof of
Theorem 2.7, with H
±s
replaced by L
2
. It remains to show u in fact belongs to
C ([0,T]; L
2
(R
d
)), and does satisfy the L
2
energy estimate in (2.1.12).
We take a mollifying kernel ρ ∈ D
∞
(R
d
; R
+
), define ρ
ε
(x)=ε
−d
ρ(x/ε), and
consider the operator R
ε
associated with the convolution by ρ
ε
.Thenu
ε
:= R
ε
u
belongs to L
2
([0,T]; H
+∞
(R
d
)) and goes to u in L
2
([0,T]; L
2
(R
d
)), and similarly
for f
ε
:= R
ε
f, while g
ε
:= R
ε
g belongs to H
+∞
(R
d
) and goes to g in L
2
(R
d
)when
ε goes to zero. Furthermore, by Theorem C.14 we have
lim
ε→0
[L
v
,R
ε
]u(t)
L
2
(R
d
)
=0.
Therefore,
∂
t
u
ε
= f
ε
+ L
v
u
ε
− [L
v
,R
ε
]u
belongs to L
2
([0,T]; L
2
(R
d
)), and consequently u
ε
belongs to H
1
(R
d
× [0,T]).
Thanks to Remark 2.4 this additional regularity of u
ε
allows us to apply the
energy estimate in (2.1.12) (Theorem 2.5) to u
ε
, and of course also to u
ε
− u
ε
.
Well-posedness in Sobolev spaces 69
Hence
u
ε
(t) − u
ε
(t)
2
L
2
≤ K
e
γt
u
ε
(0) − u
ε
(0)
2
L
2
+
t
0
e
γ(t−τ)
L
v
u
ε
(τ) − L
v
u
ε
(τ)
2
L
2
dτ
for all ε, ε
∈ (0, 1). Since u
ε
(0) = g
ε
goes to u(0) = g in L
2
(R
d
), and (using
the Lebesgue theorem in the time direction),
L
v
u
ε
= f
ε
+[L
v
,R
ε
]u
goes to L
v
u = f in L
2
(R
d
× (0,T)), the inequality here above implies that
(u
ε
) is a Cauchy sequence in C ([0,T]; L
2
(R
d
)). By uniqueness of limits in
L
2
([0,T]; L
2
(R
d
)) (and the Lebesgue theorem again), u is necessarily the limit
of (u
ε
)inC ([0,T]; L
2
(R
d
)). Finally, by passing to the limit in
u
ε
(t)
2
L
2
≤ K
e
γt
u
ε
(0)
2
L
2
+
t
0
e
γ(t−τ)
L
v
u
ε
(τ)
2
L
2
dτ
we obtain
u(t)
2
L
2
≤ K
e
γt
u(0)
2
L
2
+
t
0
e
γ(t−τ)
L
v
u(τ)
2
L
2
dτ
.
Uniqueness readily follows from this estimate.
Finally, for Friedrichs-symmetrizable systems with Lipschitz coefficients, H
1
-
well-posedness also holds true, as stated in the following result, which will be
used in the Initial Boundary Value Problem theory.
Theorem 2.9 Assume v ∈ W
1,∞
(R
d
× (0,T)) and the operator
∂
t
+
α
A
α
(w) ∂
α
is Friedrichs symmetrizable for w in a domain containing the range of v.(As
usual, A
α
aresupposedtobeC
∞
functions of w, and so the Friedrichs sym-
metrizer.) Then for all g ∈ H
1
(R
d
), the Cauchy problem
L
v
u =0,u(0) = g
has a unique solution u ∈ C ([0,T]; H
1
(R
d
)) ∩ C
1
([0,T]; L
2
(R
d
)).
Proof Unsurprisingly, the proof relies on a regularization of the coefficients
andontheH
1
estimate in (2.1.13). Consider a mollifier ρ
ε
and v
ε
= ρ
ε
∗ v.
Then v
ε
is bounded independently of ε in W
1,∞
(R
d
× (0,T)) and goes to v in
C ([0,T]; L
∞
(R
d
)). By Theorem 2.6, the Cauchy problem
L
v
ε
u
ε
=0,u
ε
(0) = ρ
ε
∗ g
70 Linear Cauchy problem with variable coefficients
admits a unique solution u
ε
∈ C
∞
([0,T]; H
∞
(R
d
)). Applying (2.1.13) to u
ε
we
see (u
ε
) is uniformly bounded in C ([0,T]; H
1
(R
d
)). Furthermore, (u
ε
)isaCauchy
sequence in C ([0,T]; L
2
(R
d
)).Indeed,bytheL
2
energy estimate (2.1.12), we have
u
ε
(t) − u
ε
(t)
L
2
(R
d
))
≤ K
e
γt
u
ε
(0) − u
ε
(0)
2
L
2
+
t
0
e
γ(t−τ)
L
v
(u
ε
− u
ε
)(τ)
2
L
2
dτ
and
L
v
(u
ε
− u
ε
)(τ)
L
2
≤ ( u
ε
C ([0,T ];H
1
(R
d
))
+ u
ε
C ([0,T ];H
1
(R
d
))
)
× max
α
A
α
(v
ε
) − A
α
(v
ε
)
C ([0,T ];L
∞
(R
d
))
.
Therefore, u
ε
converges to some u ∈ C ([0,T]; L
2
(R
d
)). Furthermore, for all t ∈
[0,T], u
ε
(t) belongs to H
1
(R
d
) by weak compactness of bounded balls in H
1
(R
d
),
and by L
2
–H
1
interpolation, u
ε
converges to u in C ([0,T]; H
s
(R
d
)) for all s ∈
[0, 1). It is not obvious that u belongs to C ([0,T]; H
1
(R
d
)) though. If we can
prove that u is continuous at t = 0 in the space H
1
(R
d
), then for the same
reason, by translating time it will also be right continuous at any t
0
∈ [0,T], as
well as left continuous by reversing the time. Now by an ε/3 argument together
with the continuity of u
ε
at t = 0, the convergence of ρ
ε
∗ g to g in H
s
and the
convergence of u
ε
to u in C ([0,T]; H
s
(R
d
)), we already see that
lim
t0
u(t) − g
H
s
(R
d
)
=0
for all s ∈ [0, 1), and we want to prove that
lim
t0
u(t) − g
H
1
(R
d
)
=0.
We can first show that u(t) converges to g as t goes to 0+ in H
1
w
(R
d
), the Sobolev
space H
1
(R
d
) equipped with the weak topology. Indeed, for all φ in H
−1
and
ψ ∈ H
−s
(for s<1), we have
|φ, u(t) − g
H
−1
,H
1
|≤u(t) − g
H
1
φ − ψ
H
−1
+ ψ
H
−s
u(t) − g
H
s
,
in which φ − ψ
H
−1
can be made arbitrarily small, u(t) − g
H
1
is bounded
independently of t and u(t) − g
H
s
is already known to go to zero with t.Soby
a standard result on weak topology, the strong convergence of u(t)tog in H
1
will be proved if we can show that
lim sup
t0
u(t)
H
1
≤g
H
1
.
And this inequality is a (tricky) consequence of (2.1.13) applied to u
ε
, or more
precisely of the refined version
u
ε
(t)
1,v
ε
(t)
≤ e
γt
u
ε
(0)
1,v
ε
, (2.1.18)

Well-posedness in Sobolev spaces 71
where we have defined a modified, equivalent norm on H
1
by
u
2
1,v
=
S
0
(v) u
L
2
+
α
S
0
(v) ∂
α
u
2
L
2
,
with S
0
a Friedrichs symmetrizer of the operator. We postpone the proof of
(2.1.18) for a moment, and complete the proof of Theorem 2.9. Observe that
(u
ε
(t)) also converges to u(t) uniformly on [0,T]inH
1
w
. Indeed, for all φ in H
−1
and ψ ∈ H
−s
with s ∈ (0, 1), we have
sup
t∈[0,T ]
|φ, (u
ε
− u)(t)
H
−1
,H
1
|≤u
ε
− u
C ([0,T ];H
1
(R
d
))
φ − ψ
H
−1
+ ψ
H
−s
u
ε
− u
C ([0,T ];H
s
(R
d
))
,
where the first term in the right-hand side can be made arbitrarily small, and
the second term is already known to tend to 0. Therefore, using the convergence
of v
ε
in C ([0,T]; L
∞
(R
d
)), we get by passing to the limit in (2.1.18),
sup
τ∈[0,t]
u(t)
1,v(t)
≤ lim sup
ε0
sup
τ∈[0,t]
u
ε
(t)
1,v
ε
≤ e
γt
g
1,v(0)
,
hence
lim sup
t0
u(t)
1,v(t)
≤g
1,v(0)
.
This shows that u(t)doesgotog strongly in H
1
when t goes to zero.
In conclusion, up to manipulating the time as explained above, this implies
u belongs to C ([0,T]; H
1
(R
d
)), and by passing to the limit in L
v
ε
u
ε
=
0 in the sense of distributions, L
v
u = 0, which implies u is also in
C
1
([0,T]; L
2
(R
d
)).
Proof of the inequality in (2.1.18) We omit the subscript ε. Revisiting the
proof of (2.1.13) (in the case L
v
u = 0) and differentiating the equation
∂
t
u +
α
A
α
(v) ∂
α
u =0
before multiplying by S
0
(v), we get
∂
t
∂
β
u +
α
A
α
(v) ∂
α
∂
β
u =
α
[∂
β
,A
α
(v)∂
α
] u,
where
[∂
β
,A
α
(v)∂
α
] u(t)
L
2
(R
d
)
≤A
α
(v(t))
W
1,∞
(R
d
)
u(t)
H
1
(R
d
)
.

72 Linear Cauchy problem with variable coefficients
Now we compute
d
dt
u(t)
2
1,v(t)
= R
v
u, u +
β
R
v
∂
β
u, ∂
β
u
+2Re
α,β
S
0
(v)∂
β
u, [∂
β
,A
α
(v)∂
α
] u ,
where
R
v
:= ∂
t
S
0
(v)+
α
∂
α
(S
0
(v) A
α
(v)),
and infer by the Cauchy–Schwarz inequality that
d
dt
u(t)
1,v(t)
≤ γ u(t)
1,v(t)
,
with
γ :=
1
2
S
0
(v)
−1
L
∞
(R
d
×[0,T ])
(R
v
L
∞
(R
d
×[0,T ])
+
α
A
α
(v(t))
W
1,∞
(R
d
)
).
2.2 Local uniqueness and finite-speed propagation
Most of the definitions introduced in Chapter 1 extend to the variable-coefficient
systems by ‘freezing’ the coefficients. We already used the notions of Friedrichs-
symmetrizable systems (Definition 2.1) and constantly hyperbolic systems (in
Theorem 2.3) as a generalization of Definition 1.2. In view of Definition 1.5, we
can also associate to system (2.0.1) a characteristic cone
char(x, t):={(ξ,λ) ∈ R
d
× R ;det(A(x, t, ξ)+λI
n
)=0}
at each point (x, t) ∈ R
d
× R
+
, and the corresponding forward cone Γ(x, t), which
is the connected component of (0, 1) in (R
d
× R) \ char(x, t). Additionally, for a
symmetrizable system with symbolic symmetrizer S(x, t, ξ), we can also define
Υ(x, t)={(ξ,τ) ∈ R
d
× R ; S(x, t, ξ)(τI
n
+ A(x, t, ξ)) > 0 }, (2.2.19)
where positivity is to be understood in the sense of Hermitian matrices. Observe
that the set Υ(x, t) is still an open cone due to the homogeneity degree 0 of S in
ξ. If the operator L is constantly hyperbolic, then Γ(x, t) is the set of (ξ,λ)such
that all the roots τ of the equation
det ( A(x, t, ξ)+(λ + τ)I
n
)=0
are strictly negative, that is,
Γ(x, t)={(ξ,λ) ; Sp( λI
n
+ A(x, t, ξ)) ⊂ (0, +∞) }.
Local uniqueness and finite-speed propagation 73
We thus have, for a system both Friedrichs symmetrizable and constantly hyper-
bolic,
Γ(x, t)={(ξ,λ); S(x, t, ξ)(λI
n
+ A(x, t, ξ)) > 0 } =Υ(x, t)
for any symmetrizer S(x, t, ξ).
Definition 2.5 Let H be a smooth hypersurface in R
d
× R
+
. Denoting by n the
normal vector to H, we say that H is
i) characteristic at point (x, t) if n(x, t) ∈ char(x, t),
ii) space-like at point (x, t) if n(x, t) ∈−Γ(x, t) ∪ Γ(x, t).
If i), or respectively ii), holds for all (x, t), H is simply said to be characteristic,
or space-like, respectively.
By definition of Γ, a space-like surface is, of course, not characteristic. And
the most natural example of a space-like surface is {t =0}! The interest of
space-like surfaces is that they are associated with local uniqueness results.
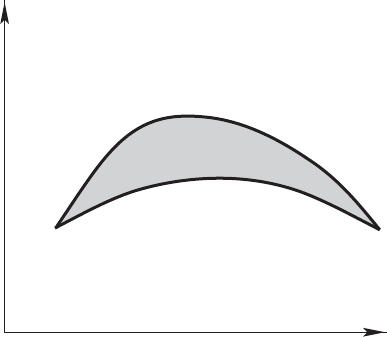
Theorem 2.10
i) Assuming that the system (2.0.1) is constantly hyperbolic and f ≡ 0,letH
be a space-like hypersurface at (x
0
,t
0
). Then there exists a neighbourhood
N of (x
0
,t
0
) such that, if u is a C
1
solution of (2.0.1) in N and u|
H∩N
≡
0 then u|
N
≡ 0. (The reader may refer to Figure 2.1.)
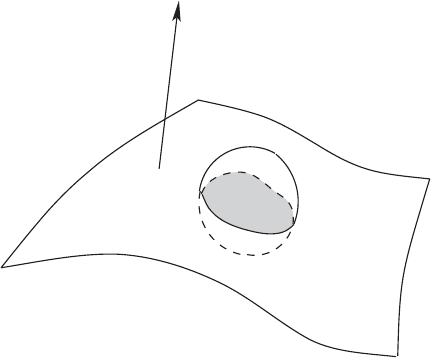
ii) Assuming that the system (2.0.1) is Friedrichs symmetrizable and f ≡ 0,
let L be a lens made of two space-like surfaces, H and K , sharing the
H
(x
0
,t
0
)
x
N
t
Figure 2.1: Illustration of local uniqueness for constantly hyperbolic systems
74 Linear Cauchy problem with variable coefficients
t
x
H
K
L
Figure 2.2: Illustration of local uniqueness for Friedrichs-symmetrizable systems
same boundary. If u is a C
1
solution of (2.0.1) in L and if u ≡ 0 on H,
for instance, then u ≡ 0 also on K . (The reader may refer to Figure 2.2.)
Proof We begin with ii), the proof of which is more elementary. It is analogous
to the localized computations performed in Sections 1.3.1 and 1.3.3. We denote
by S
0
a Friedrichs symmetrizer of (2.0.1). Multiplying (2.0.1) by u
∗
S
0
we get
L
∂
t
(S
0
u, u)+
L
α
∂
α
(S
0
A
α
u, u)=
L
(Ru, u),
where R := ∂
t
S
0
+
α
∂
α
(S
0
A
α
)+S
0
B + B
T
S
0
(like in Proposition 2.2). Inte-
grating the left-hand side yields the equality
K
n
0
(S
0
u, u)+
K
α
n
α
(S
0
A
α
u, u)
=
H
n
0
(S
0
u, u)+
H
α
n
α
(S
0
A
α
u, u)+
L
(Ru, u) ,
where n
0
denotes the t-component and n
α
the x
α
-component of n.Sincen
belongs to −Υ ∪ Υ, the matrix S
0
( n
0
I
n
+
α
n
α
A
α
) is definite, with the same
sign at all points (x, t)of∂L by continuity. Assume, for instance, that it is
positive. Then there exists γ>0 such that
S
0
( n
0
I
n
+
α
n
α
A
α
) ≥ γI
n