Bednorz W. (ed.) Advances in Greedy Algorithms
Подождите немного. Документ загружается.

Greedy Methods in Plume Detection, Localization and Tracking
321
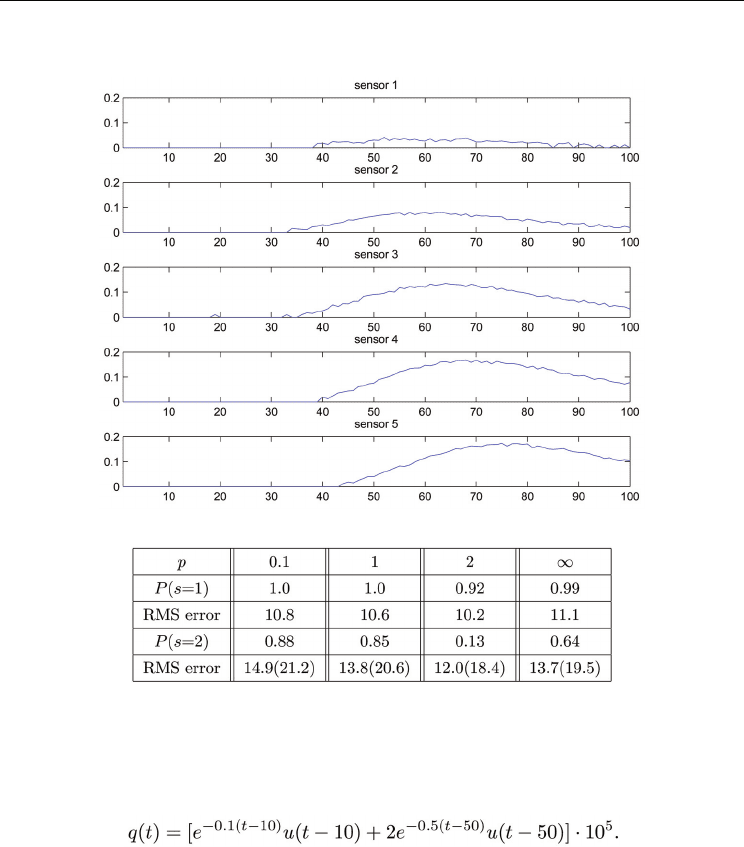
These observations suggest that the l
p
-regularized least squares method is effective in joint
model selection and parameter estimation for instantaneous source release.
Fig. 3. Sensor readings for a single source with instantaneous release.
Table 1. Comparison of Model Selection and Source Localization Accuracy with Different
Regularization Methods
3.5.3 Model mismatch to continuous release source
Consider a single source located at (-40, 35, 12) with continuous release rate
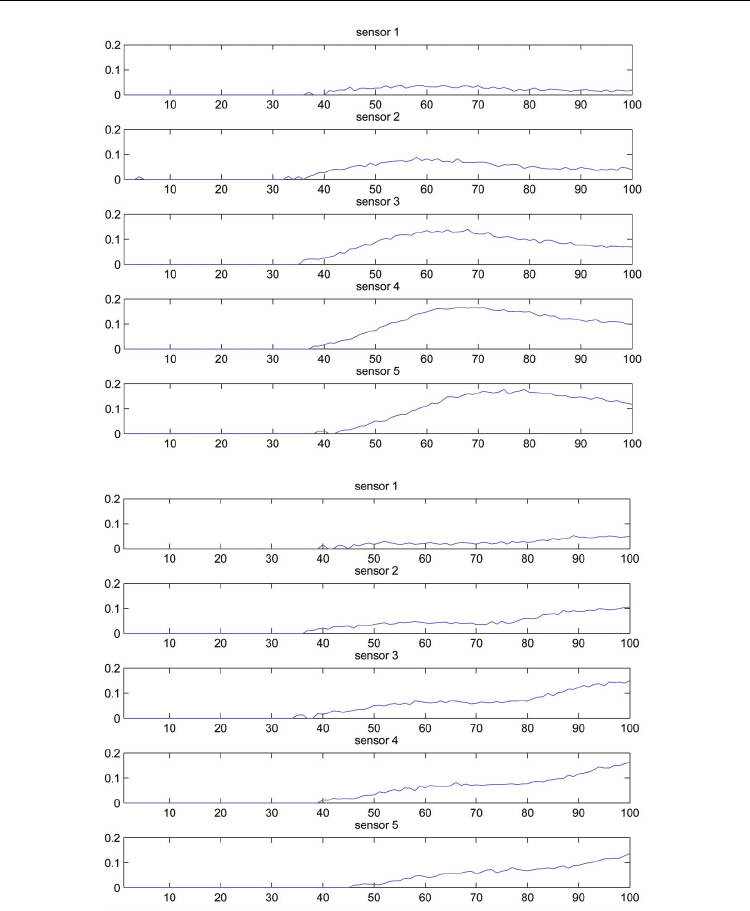
One realization of the concentration readings from the five sensors is shown in Fig. 5. Note
that the concentration readings from sensors 2-5 have not reached their peaks by the end of
the samples. This will in general make the source parameter estimation more difficult. In 100
realizations, the l
p
-regularized least squars method with p = 1 identified one source in 92
times and two sources in 8 times with their estimated locations close to each other. The
incorrect identification of model order is due to the abrupt release at two time instances
t = 10 and t = 50 with exponential decay of the release rate. The root mean square error of
the estimated source location is 15.4 using the estimates from the correctly identified cases.
Clearly, the l
p
-regularized least squares method can tolerate slight model mismatch when
the release rate sequence is not overly sparse.
Advances in Greedy Algorithms
322
Fig. 4. Sensor readings for two sources, each with instantaneous release.
Fig. 5. Sensor readings for one source with continuous release.
4. Discussion and conclusions
In this chapter, we studied plume detection, localization and tracking problem with two
different settings. For plume mapping with binary detection sensors, we formulated the
problem as finding the most likely state sequence based on a fuzzy hidden Markov model.

Greedy Methods in Plume Detection, Localization and Tracking
323
Under the assumption that each sensor has high detection and low false alarm probability, we
proposed a greedy heuristic decoding algorithm with much less computational cost than the
well known Viterbi algorithm. The plume localization accuracy of our algorithm is close to the
optimal decoder using Viterbi algorithm when tracking a single plume using randomly
deployed sensors. Our algorithm is applicable to general decoding problem over a long
observation sequence when the localization error probability of the Viterbi decoder is small.
There is a serious drawback of using FHMM for plume tracing. In our FHMM formulation,
one can not distinguish whether a plume existence state is due to source releasing or plume
propagation without knowing the whole state sequence. Thus one has to make tradeoff
between the delay and localization accuracy. A refined plume propagation model based on
more accurate sensor readings and contaminant transport physics was then used for source
localization and release rate sequence estimation. When localizing unknown number of
sources based on the observation of aggregated concentrations, we proposed an l
p
-
regularized least squares method to estimate the location and release rate of atmospheric
pollution. For 0 ≤ p ≤ 1, the method enforces sparsity of the release sequence of each
identified source. The proposed greedy method can identify multiple sources of
instantaneous release type and can also localize sources of continuous release. The accuracy
of source parameter estimation has been examined for the cases where the number of
sources and the corresponding locations are unknown.
In general, the least squares approach does not provide any measure of the estimation error.
However, one can examine the residual and make additional assumptions such as additive
Gaussian noise in order to quantify the covariance of the localization error. Through
simulation study, we found that the proposed method is effective in localizing instantaneous
release sources and has certain degree of tolerance to model mismatch. It is worth noting that
the sensor locations, sampling rate and measurement accuracy can affect the source
localization performance significantly. Finding the best sensor placement and sensing strategy
in a given surveillance area is another important research theme and demands future work.
We hope that with the advances in the development of greedy algorithms, many other
challenging optimization tasks can be tackled with efficient and near optimal solutions.
5. References
[1] S. Boyd, and L. Vandenberghe, Convex Optimization, Cambridge University Press, 2004.
[2] S. M. Brennan, A. M. Mielke, and D. C. Torney, “Radiation Detection with Distributed
Sensor Networks,” IEEE Computer, pp. 57-59, August 2004.
[3] S. M. Brennan, A. M. Mielke, and D. C. Torney, “Radioactive Source Detection by Sensor
Networks,” IEEE Nuclear Science, 52(3), pp. 813-819, 2005.
[4] E. J. Candes and T. Tao,”The Dantzig Selector: Statistical Estimation When p Is Much
Larger Than n,” submitted to Annals of Statistics, 2005.
[5] T. H. Cormen, C. E. Leiserson, and R. L. Rivest, Introduction to Algorithms, first edition,
MIT Press and McGraw-Hill, 1990.
[6] T. M. Cover, and J. A. Thomas, Elements of Information Theory, New York: Wiley, 1991.
[7] R. Chartrand, “Exact Reconstruction of Sparse Signals via Nonconvex Minimization,”
IEEE Signal Processing Lett., 14, pp. 707-710, 2007.
[8] J.-C. Chin, L.-H. Hou, J.-C. Hou, C. Ma, N.S. Rao, M. Saxena, M. Shankar, Y. Yong, and
D.K.Y. Yau,”A Sensor-Cyber Network Testbed for Plume Detection, Identification,
and Tracking,” 6th International Symposium on Information Processing in Sensor
Networks, pp. 541-542, 2007.

Advances in Greedy Algorithms
324
[9] R. A. Dobbins, Atmospheric Motion and Air Pollution: An Introduction for Students of
Engineering and Science, John Wiley & Sons, 1979.
[10] D. L. Donoho, “Compressed Sensing,” IEEE Trans. Information Theory, 52, pp. 1289-1306, 2006.
[11] J. A. Farrell, S. Pang, and W. Li, “Plume Mapping via Hidden Markov Methods," IEEE
Trans. SMC-B, 33(6), pp. 850-863, 2003.
[12] E. B. Fox, J. W. Fisher, and A. S. Willsky, “Detection and Localization of Material
Releases with Sparse Sensor Configurations,” IEEE Trans. on Signal Processing, 55(5),
pp. 1886-1898, May 2007.
[13] P. S. Huggins, S. W. Zucker, “Greedy Basis Pursuit,”, IEEE Trans. Signal Processing,
55(7), pp. 3760-3772, July 2007.
[14] H. Ishida, T. Nakamoto, T. Moriizumi, T. Kikas, and J. Janata, “Plume-Tracking Robots:
A New Application of Chemical Sensors,”Biological Bulletin, 200, pp. 222-226, 2001.
[15] H. Ishida, G. Nakayama, T. Nakamoto, and T. Moriizumi, “ Controlling A Gas/Odor
Plume-Tracking Robot based on Transient Responses of Gas Sensors," IEEE Sensors
Journal, 5(3), pp. 537-545, 2005.
[16] P. Kathirgamanathan, R. McKibbin and R. I. McLachlan, “Source Release Rate
Estimation of Atmospheric Pollution from Non-Steady Point Source - Part 1: Source
at A Known Location,” Res. Lett. Inf. Math. Sci., 5, pp. 71-84, 2003.
[17] P. Kathirgamanathan, R. McKibbin and R. I. McLachlan, “Source Release Rate
Estimation of Atmospheric Pollution from Non-Steady Point Source - Part 2: Source
at An Unknown Location,” Res. Lett. Inf. Math. Sci., 5, pp. 85-118, 2003.
[18] C. Kennedy, H. Ericsson, and P. L. R. Wong, “Gaussian Plume Modeling of
Contaminant Transport,” Stoch. Environ. Res. Risk Assess, 20, pp. 119-125, 2005.
[19] J. Luo, “Low Complexity Maximum Likelihood Sequence Detection under High SNR,”
submitted to IEEE Trans. Information Theory, Sept. 2006.
[20] M. A. Mohamed, and P. Gader, “Generalized Hidden Markov Models - Part I:
Theoretical Frameworks”, IEEE Trans. on Fuzzy Systems, 8(1), pp. 67-81, 2000.
[21] M. A. Mohamed, and P. Gader, “Generalized Hidden Markov Models - Part II: Application
to Handwritten Word Recognition", IEEE Trans. on Fuzzy Systems, 8(1), pp. 82-94, 2000.
[22] A. Nehorai, B. Porat, and E. Paldi, “Detection and Localization of Vapor-Emitting
Sources,”IEEE Transactions on Signal Processing, 43(1), pp. 243-253, 1995.
[23] G. Nofsinger, and G. Cybenko, “Distributed Chemical Plume Process Detection,” IEEE
MILCOM, Atlantic City, NJ, USA, 2005.
[24] M. Ortner, and A. Nehorai, “A Sequential Detector for Biochemical Release in Realistic
Environments,” IEEE Transactions on Signal Processing, 55(8), pp. 4173-4182, 2007.
[25] L. R. Rabiner, “A Tutorial on Hidden Markov Models and Selected Applications in
Speech Recognition,” Proc. of the IEEE, 77(2), pp. 257-286, 1989.
[26] N. Rao, “Identification of Simple Product-Form Plumes Using Networks of Sensors With
Random Errors,” Proc. Int. Conf. on Information Fusion, Florence, Italy, July 2006.
[27] G. Schwartz, “Estimating the Dimension of a Model,” Annals of Statistics, vol.6, pp. 461-464, 1978.
[28] J. N. Seinfeld and S. N. Pandis,
Atmospheric Chemistry and Physics: From Air Pollution to
Climate Change, John Wiley & Sons, New Jersey, 1997.
[29] R. Tibshirani, “Regression Shrinkage and Selection via the LASSO," Journal Royal
Statistical Society B, 58, pp. 267-288, 1996.
[30] T. Zhao and A. Nehorai, ”Detecting and Estimating Biochemical Dispersion of A
Moving Source in A Semi-Infinite Medium,” IEEE Transactions on Signal Processing,
54(6), pp. 2213-2225, 2006.
[31] T. Zhao and A. Nehorai, “Distributed Sequential Bayesian Estimation of a Diffusive
Source in Wireless Sensor Networks,", IEEE Transactions on Signal Processing, 55(4),
pp. 1511-1524, 2007.
18
Greedy Type Bases in Banach Spaces
1
Witold Bednorz
Department of Mathematics, Warsaw Univeristy
Poland
1. Introduction
Let (X, &·&) be a (real) Banach space. We refer to [38] or [28] as some introduction to the
general theory of Banach spaces. Note that, as usual in the case, all the results we discuss
here remain valid for complex scalars with possibly different constants. Let I be a countable
set with possibly some ordering we refer to whenever considering convergence with respect
to elements of I (wich will be denoted by lim
i→∞
).
Definition 1 We say that countable system of vectors
is biorthogonal if for i, j ∈ I
we have
(1)
Such a general class of systems would be inconvenient to work with, therefore we require
biorthogonal systems to be aligned with the Banach space X we want to describe.
Definition 2 We say that system
is natural if the following conditions are satisfied:
(2)
(3)
(4)
Usually we assume also that
for all i ∈I, i.e. we normalize the system. Note that if
(4) holds then functionals
are uniquely determined by the set and thus
slightly abusing the convention we can speak about
being a biorthogonal system.
Observe that if assumptions (1)-(4) are verified, then each
is uniquely determined
by the values
and moreover
for every
.
Clearly the concept of biorthogonal system is to express each
as the series
convergent to x. If such expansion exists for all then we work in in
the usual Schauder basis setting.
1
Research is partially supported by the Foundation for Polish Science: Grant NP-37
Advances in Greedy Algorithms
326
Definition 3 A natural system
is said to be Schauder basis if I = N and for any the
series
*
1
()
ii i
ee
∞
=
∑
x is convergent.
However in this chapter we proceed in a slightly more general environment and do not
require neither convergence of
*
1
()
ii i
ee
∈
∑
x nor fix a particular order on I. Obviously still the
idea is to approximate any
by linear combinations of basis elements and therefore
for any and
we define
(5)
whenever this makes sense. In particular it is well defined for any finite J. It suggests that for
each m = 0, 1, 2, … we can consider the space of m-term approximations. Namely we denote
by
the collection of all elements of X which can be expressed as linear combinations of
m elements of
i.e.:
Let us observe that the space
is not linear since the sum of two elements from
is
generally in Σ
2m
not in Σ
m
. For and for m = 0, 1, 2, … we define its best m-term
approximation error (with respect to
)
Commonly the system
is clear from the context and hence we can suppress it form the
above notation. Observe that from (4) we acknowledge that for each
we have
There is a natural question one may ask, what has to be assumed for
the best m-term approximation to exist, i.e. that there exists some
such that
The question of existence of the best m-term approximation for a given
natural system was discussed even in a more general setting in [4]. A detailed study in our
context can be found in [39] from which we quote the following result:
Theorem 1 Let be a natural biorthogonal system in X. Assume that there exists a
subspace
such that
1. Y is norming i.e. for all
2. for every we have lim
i→∞
y(e
i
) = 0.
Then for each and m = 0, 1, 2, … there exists such that
The obvious candidate for being the norming subspace of X* is
Later we will show that this is the case of unconditional bases.
The idea of an approximation algorithm is that we construct a sequence of maps T
m
: X →X,
m = 0, 1, 2, … such that for each
, we have that The fundamental
property which any admissible algorithm (T
m
)
m≥0
should verify is that the error we make is
comparable with the approximation error, namely
(6)
Greedy Type Bases in Banach Spaces
327
where C is an absolute constant. The potentially simplest approach is to use projection of the
type (5). We will show later that in the unconditional setting for each m,
there exists
projection P
J
which has the minimal approximation error, namely
Among all the possible projections, one choice seems to be the most natural: we take a
projection with the largest possible coefficients, that means we denote
where the set is chosen in such a way that
whenever j ∈ J and k ∉ J. The collection of such , i.e. will be called the Greedy
Algorithm.
Clearly
, m = 0, 1, 2, … have some surprising features which one should keep in mind,
when working with this type of approximation (cf. [40]):
1. It may happen that for some x and m the element
(i.e. the set J) is not uniquely
determined by the previous conditions. In such case we pick any of them.
2. The operator is not linear (even if appropriate sets are uniquely defined).
3. The operator
is discontinuous. To see it it suffices to fix such that
We define two sequences of vectors
Clearly both y
n
and z
n
converge to but
and
4. Following the previous example we learn that is continuous at the point if
and only if the set J used in the definition of
is uniquely defined.
5. If I = N then there is a simple trick to define
uniquely, namely given we
define greedy ordering as the map F : N → N such that
and
so that if j < k then either
and F(j)
< F(k). With this notation the mth greedy approximation of x equals
Advances in Greedy Algorithms
328
As announced we consider the greedy algorithm acceptable if it verifies (6). We formalize
the idea in the following definitions:
Definition 4 A natural biorthogonal system
is called a greedy basis if there exists a constant C
such that for all
and m = 0, 1, 2, … we have
The smallest constant C will be called the greedy constant of .
Definition 5 A natural biorthogonal system
is called quasi-greedy if for every the norm
limit
exists (and equals x).
Clearly every greedy basis is quasi-greedy. We remark that those concepts were formall
defined in [26] though implicit in earlier works of Temlyakov [30]-[33]. Throughout the
chapter we study various properties of greedy and quasi greedy bases. Toward this goal let
us introduce the following notation:
2. Unconditional bases
One of the most fruitful concepts in the Banach space theory concerns the unconditionality
of systems. The principal idea of the approach is that we require the space to have a lot of
symmetry which we hope to provide a number of useful properties. We refer to [37],[38] as
some introductory feedback to this item.
Definition 6 A biorthogonal system
is unconditional if there exists a constant K
such for all and any finite we have have The smallest such
constant K will be called unconditional constant.
Remark 1 Note that the above definition is equivalent to requiring that
for all
(not necessarily finite)
.
Sometimes we refer to a stronger property which is called symmetry.
Definition 7 An an unconditional system is symmetric if there exists a constant U
such for all
, any permutation and random signs we have
Greedy Type Bases in Banach Spaces
329
The smallest such constant U will be called symmetric constant.
Usually in the sequel we will assume that the unconditional system has the unconditional
constant equal to 1. This is not a significant restriction since given unconditional system
in X one can introduce a new norm
By the classical extreme point argument one can check that this is an equivalent norm on X,
more precisely
for and has unconditional constant 1 in
In the classical Banach space theory a lot of attention has been paid to
understand some features of spaces which admits the unconditional basis. We quote from
[1] a property we have announced in the introduction.
Proposition 1 Let be an unconditional basis for X (with constant K). Then
verifies that
for all
Proof. Let
. Since it follows immediately that
For the other inequality, pick
(from unit sphere in X*) so that
Then for each finite J we have
Now we let J tend to I and use that if
■
Therefore according to Theorem 1 the optimal m-term approximation for unconditional
system exists, i.e. is attained at some y ∈ . We remark that there are a lot of
classical spaces which does not admit any unconditional basis and even (e.g. C[0, 1] see [1])
cannot be embedded into a Banach space with such a structure.
In the greedy approximation theory we consider the class of unconditional bases as the fine
class we usually tend to search for the optimal algorithm (see [14]). The reason is that for
unconditional bases for a given the best m-term approximation must be attained at
some projection
Proposition 2 Let
be a natural biorthogonal system with unconditional constant 1.
Then for each
and each m = 0, 1, 2, … there exists a subset of cardinality m such
that
Proof. Let us fix m and be the best m-term
approximation i.e.
(the existence is guaranteed by Proposition 1). Note that
which completes the proof. ■
Advances in Greedy Algorithms
330
We turn to show that for unconditional systems
and are comparable. The result we
quote from [35] but for concrete systems (see [32]) the answer was known before.
Theorem 2 If is a natural biorthogonal system with unconditional constant 1, then
Proof. We have shown in Proposition 2 that we can take the best m-term approximation of x
as
Clearly for some . In order to estimate
we write
so using 1-unconditionality we obtain
Note that m.
This implies that
Thus
estimating c from the second inequality and substituting it into the first we get
Consequently
To show the converse inequality use the following result:
Lemma 1 For each m there exists disjoint sets J
1
and J
2
with such that
Proof. If
the claim is obvious. Otherwise take sets J
1
and J
2
with such
that
For simplicity write
With this notation we have This implies
so
Thus we have to replace J
1
by any set of proper cardinality which
contains J
1
\J
2
and is disjoint with J
2
.
■