Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

540
Many types of elastic structures can be modeled as thin elastic beams. Towers, drills, and baseball bats are examples
of such systems. (Source: Kristiina Paul; © Jeffwilliams87 / Dreamstime.com)
541
9
Vibrations of Beams
9.1 INTRODUCTION
9.2 GOVERNING EQUATIONS OF MOTION
9.2.1 Preliminaries from Solid Mechanics
9.2.2 Potential Energy, Kinetic Energy, and Work
9.2.3 Extended Hamilton’s Principle and Derivation of Equations of Motion
9.2.4 Beam Equations for a General Case
9.3 FREE OSCILLATIONS: NATURAL FREQUENCIES AND MODE SHAPES
9.3.1 Introduction
9.3.2 Natural Frequencies, Mode Shapes, and Orthogonality of Modes
9.3.3 Effects of Boundary Conditions
9.3.4 Effects of Stiffness and Inertia Elements Attached at an Interior Location
9.3.5 Beams with an Interior Mass, Spring, and Single Degree-of-Freedom
System Attached Simultaneously
9.3.6 Effects of an Axial Force and an Elastic Foundation
9.3.7 Tapered Beams
9.4 FORCED OSCILLATIONS
9.5 SUMMARY
9.1 INTRODUCTION
In Chapters 3 through 8, vibrations of systems with finite degrees of freedom
were treated. As mentioned in Section 2.5, elements with distributed inertia
and stiffness properties, such as beams, are used to model many physical
systems such as the ski of Section 2.5.4, the work-piece-tool system of Section
2.5.5, and the MEMS accelerometer of Section 2.5.2. As noted previously,
distributed-parameter systems, which are also referred to as spatially continu-
ous systems, have an infinite number of degrees of freedom. Apart from beams,
distributed systems that one could use in vibratory models include strings, ca-
bles, bars undergoing axial vibrations, shafts undergoing torsional vibrations,
membranes, plates, and shells. Except for the last three systems mentioned, the
descriptions of all of the other systems require one spatial coordinate. The
equations of motion, which govern vibratory systems with finite degrees of
freedom, are ordinary differential equations, and these equations are in the
form of an initial-value problem. By contrast, the equations of motion govern-
ing distributed-parameter systems are in the form of partial differential equa-
tions, with boundary condition and initial conditions, and the determination of
the solution for the vibratory response of a distributed-parameter system re-
quires the use of additional mathematical techniques. However, notions such as
natural frequencies, mode shapes, orthogonality of modes, and normal-mode
solution procedures used in the context of finite degree-of-freedom systems ap-
ply equally well to infinite degree-of-freedom systems. An infinite degree-of-
freedom system has an infinite number of natural frequencies and a mode shape
associated with the free oscillations at each one of these frequencies.
In this chapter, the free and forced vibrations of beams are considered at
length. The oscillations of bars, shafts, and strings are treated in Appendix G.
As illustrated by the diverse examples of Section 2.5, vibratory models of
many physical systems require the use of beam elements. In addition to these
examples, other examples where beam elements are used to model physical
systems include models of rotating machinery, ship hulls, aircraft wings, and
vehicular and railroad bridges. Propeller blades in a turbine and the rotor
blades of a helicopter are modeled by using beam elements. Since the vibra-
tory behavior of beams is of practical importance for these different systems,
the focus of this chapter will be on beam vibrations.
In each of the applications cited above, and in many others, the beams are
acted upon by dynamically varying forces. Depending on the frequency con-
tent of these forces, the forces have the potential to excite the beam at one or
more of its natural frequencies. One of the frequent requirements of a design
engineer is to create an elastic structure that responds minimally to the imposed
dynamic loading, so that large displacement amplitudes, high stresses and
structural fatigue are minimized, and wear and radiated noise are decreased.
The governing equations of motion for beams are obtained by using the
mechanics of elastic beams and Hamilton’s principle. Free oscillations of un-
forced and undamped beams are treated and various factors that influence the
natural frequencies and modes are examined. This examination includes the
treatment of inertial elements and springs attached at an intermediate location
and beam geometry variation. The limitations of the models used in the pre-
vious chapters are also pointed out in the context of systems where a flexible
structure supports systems with one or two degrees of freedom. The use of the
normal-mode approach to determine the forced response of a beam is also
presented.
In this chapter, we shall show how to:
• Determine the natural frequencies and mode shapes of Bernoulli-Euler
beams of constant cross-section for a wide range of boundary conditions.
• Determine the conditions under which the mode shapes are orthogonal for
the given mass and stiffness distributions.
542 CHAPTER 9 Vibrations of Beams
• Determine the natural frequencies and mode shapes of Bernoulli-Euler
beams with attached local stiffness and inertia elements.
• Determine the natural frequencies and mode shapes of Bernoulli-Euler
beams of variable cross-section.
• Determine the responses of Bernoulli-Euler beams to initial displacements,
initial velocities, and external forcing.
9.2 GOVERNING EQUATIONS OF MOTION
In this section, we illustrate how the governing equations of an elastic beam
undergoing small transverse vibrations are obtained for arbitrary loading con-
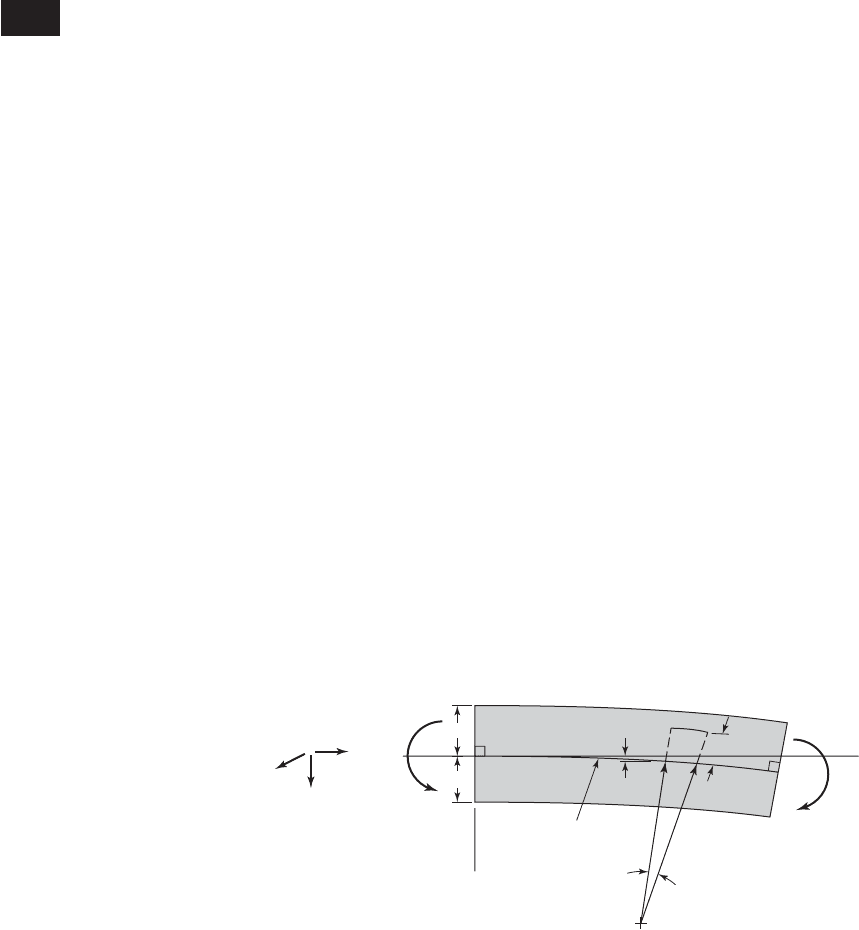
ditions and boundary conditions. A beam element in a deformed configuration
is shown in Figure 9.1. The x-axis runs along the span of the beam, and the
y-axis and z-axis run along transverse directions to the x-axis. End moments of
magnitude M are shown acting along the j direction, and it is assumed that the
beam displacement is confined to the x-z plane. The displacement w(x,t)
denotes the transverse displacement at a location along the beam.
The derivation of the governing equations of motion is based on the
extended Hamilton’s principle. To use this principle, one first needs to deter-
mine the system potential energy, the system kinetic energy, and the work
done on the system. For determining the system kinetic energy, each element
of length x is treated like a rigid body and for determining the system
potential energy, stress-strain relationships in the beam material are used. To
this end, preliminaries from solid mechanics are presented in Section 9.2.1,
and then the expressions for the kinetic energy, potential energy, and work are
obtained in Section 9.2.2.
9.2.1 Preliminaries from Solid Mechanics
In Figure 9.1, it is seen that the face of the beam located toward the center of
curvature will be contracted while that on the opposite face will be extended;
that is, face AA will be extended, while the face BB will be contracted. The
line passing through the centroids of the cross-section of the beam is called
9.2 Governing Equations of Motion 543
a
M
b
A
B
z
j
k
i
Center line
(Neutral axis)
w(x, t)
s
s
o
–z
A
B
M
x
R
FIGURE 9.1
Deformation of a beam subjected to
end moments.

the central line. Here, a fiber along the central line is assumed to experience
zero axial strain. Hence, this central line is the neutral axis. The deformation
of the beam is assumed to be described by Bernoulli-Euler beam theory,
1
which is applicable to thin elastic beams whose length to radius of gyration
ratio is greater than 10. In keeping with this theory, it is assumed that the neu-
tral axis remains unaltered, that the plane sections of the beam normal to the
neutral axis remain plane and normal to the deformed central line, and that the
transverse normals such as BA experience zero strain along the
normal direction. For a fiber located at a distance z from the neutral axis, as
shown in Figure 9.1, the strain experienced along the length of the beam is
given by
(9.1)
where R is the radius of curvature, s
o
is the length of a fiber along the neu-
tral axis, s is the length of a fiber that is located at a distance z from the
neutral axis, and we have used geometry to write
(9.2)
From Hooke’s law, the corresponding axial stress s acting on the fiber is
(9.3)
where E is the Young’s modulus of the material. According to the convention
shown in Figure 9.l, a positive displacement w is in the direction of the unit
vector k. Therefore, the fibers above the neutral axis experience a positive s,
which denotes tension, and the fibers below the neutral axis experience a neg-
ative s, which denotes compression.
At an internal section of the beam, a moment balance about the y-axis
leads to
(9.4)
where y
1
and y
2
are the spatial limits corresponding to integration along the
y direction, we have used Eq. (9.3), and
(9.5)
The quantity I represents the area moment of inertia of the beam’s cross-
section about the y-axis, which is through the centroid. In general, the limits
of the double integral in Eq. (9.5) do not have to be constants; that is, a a(x),
b b(x), y
1
y
1
(x), and y
2
y
2
(x). In this case, the area moment of inertia
I
y
2
y
1
b
a
z
2
dzdy
M
y
2
y
1
b
a
szdzdy
EI
R
s EP
Ez
R
¢s 1R z 2¢u
and
¢s
o
R¢u
P
¢s ¢s
o
¢s
o
z
R
544 CHAPTER 9 Vibrations of Beams
1
E. P. Popov, Engineering Mechanics of Solids, Prentice Hall, Upper Saddle River, NJ, Chapter 6
(1990).
varies along the length, and therefore, in general, I I(x). The curvature k
1/R, which is assumed to be positive for concave curvature downwards, is
(9.6)
If it is assumed that the slope is small—that is, , where ∂w/∂x is
the slope of the neutral axis at location x—then Eq. (9.6) simplifies to
(9.7)
Upon substituting Eq. (9.7) into Eqs. (9.1) and (9.4), we obtain
(9.8)
Thus, the magnitude of the strain and bending moment are proportional to the
second spatial derivative of the beam displacement. The statement that the
bending moment is linearly proportional to the second spatial derivative of
the beam displacement is the Bernoulli-Euler law, which is the underlying ba-
sis for the theory of linear elastic thin beams.
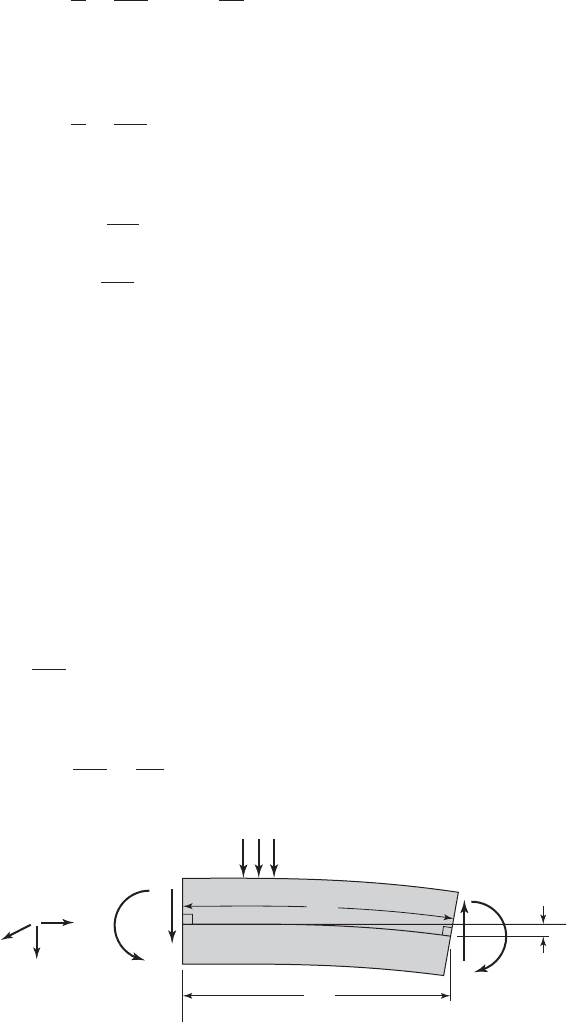
Equation (9.8) was obtained by considering only the effects of moments
on the ends of the beam. If, in addition, there is a transverse load f (x,t),
then there are vertical shear forces within the beam that resist this force. In
Figure 9.2, if the sum of the moments about point o is taken along the j direc-
tion, and if the rotary inertia of the beam element is neglected, the result is
which leads to
In the limit , the shear force increment , and we have
(9.9a)lim
¢x씮 0
¢M
¢x
0M
0x
V
¢V 씮 0¢x 씮 0
¢M
¢x
V ¢V
M 1V ¢V2¢x M ¢M
M EI
0
2
w
0x
2
P z
0
2
w
0x
2
k
1
R
0
2
w
0x
2
00w/0x 0 1
k
1
R
0
2
w
0x
2
c1 a
0w
0x
b
2
d
3/2
9.2 Governing Equations of Motion 545
x
w
M
V
z
j
k
i
s
o
M M
V V
x
o
f(x, t)
FIGURE 9.2
Deformation of an element of a beam
subjected to a transverse load.
which, after making use of Eq. (9.8), results in
(9.9b)
Thus, the shear force is equal to the change of the bending moment along the
x-axis. Consequently, if M(x) is constant along x, then V 0.
9.2.2 Potential Energy, Kinetic Energy, and Work
We construct the system potential energy, the system kinetic energy, and
determine the work done by external forces for further use in Section 9.2.4.
Potential Energy
The potential energy of a deformed beam has contributions from different
sources, including the strain energy. For a beam undergoing axial strains due
to bending, if the strain energy is the only contribution to the system potential
energy, the beam’s potential energy is written as
2
(9.10)
where we have used Eqs. (9.1), (9.3), and (9.7).
3
Kinetic Energy
Assuming that the translation kinetic energy of the beam is the only contri-
bution to the system kinetic energy, one can write it as
(9.11)
where A A(x) is the cross-sectional area of the beam and r r(x) is
the mass density of the beam’s material. If the rotary inertia of the beam ele-
ment is also taken into account, an additional term corresponding to the rota-
tional kinetic energy will have to be included in Eq. (9.11), as described by
Eq. (1.23).
T1t 2
1
2
L
0
b
a
y
2
y
1
r a
0w
0t
b
2
dydzdx
1
2
L
0
rA a
0w
0t
b
2
dx
1
2
L
0
EI a
0
2
w
0x
2
b
2
dx
U1t 2
1
2
L
0
b
a
y
2
y
1
sPdydzdx
1
2
L
0
b
a
y
2
y
1
Ez
2
R
2
dydzdx
V
0M
0x
0
0x
aEI
0
2
w
0x
2
b
546 CHAPTER 9 Vibrations of Beams
2
See, for example, I. S. Sokolonikoff, Mathematical Theory of Elasticity, McGraw Hill, NY,
Chapters 1–3 (1956).
3
Since the symbol V is used for the shear force, the symbol U is used for the potential energy,
which differs from the notation used in the earlier chapters.

Work
The work done by the applied transverse conservative load per unit length
f
c
(x,t) is given by
(9.12a)
If gravity is the only distributed conservative load acting on the beam, then
(9.12b)
If the beam is also under the action of an axial tensile force
4
p(x,t), as shown
in Figure 9.3, then the length of the central line no longer remains constant,
but extends to a new length. If we assume that the deformation is small in
magnitude and does not affect the loading p(x,t), then the change in length of
an element of the beam is (s x) where
5
(9.13)
Therefore, the external work of the axial force is given by
6
(9.14)
where we have used Eq. (9.13). Since the tensile force acts to oppose the
beam transverse displacement w, the work done has a minus sign. If the axial
force is compressive, then p(x,t) is replaced by p(x,t).
W
p
1
2
L
0
p1x,t 2a
0w
0x
b
2
dx
¢s c1
1
2
a
¢w
¢x
b
2
d¢x
f
c
1x,t 2 r1x2A1x 2g
W
f
1t 2
L
0
f
c
1x,t 2w1x,t2dx
9.2 Governing Equations of Motion 547
4
Axial loads are common in rotating blades, pipes with flow, and structural columns.
5
Note that from geometry, we have
which leads to
For small slope—that is, 0w/x 0 1—this leads to
or equivalently,
6
To construct this integral, it is noted that the work done on a segment is p(x,t)(s x), the
limit is considered, and in this limit, x is replaced by dx.¢x 씮 0
¢s ¢x
1
2
a
¢w
¢x
b
2
¢x
¢s
¢x
1
1
2
a
¢w
¢x
b
2
¢s
¢x
B
1 a
¢w
¢x
b
2
¢s
2
¢w
2
¢x
2
k
f
p(x, t)
p(x x, t
)
x
FIGURE 9.3
Beam element under axial tensile
load and on an elastic foundation.

Finally, we consider the linear elastic foundation
7
on which the beam is
resting, as shown in Figure 9.3. The transverse displacement of the beam cre-
ates a force in the foundation with the magnitude f
f
(x,t) k
f
w(x,t), where
k
f
is the spring constant per unit length of the foundation. This spring force
opposes the motion of the beam. The external work done by the elastic foun-
dation is
(9.15)
where, again, we have introduced a minus sign to account for the fact that the
foundation force acting on the beam opposes the beam displacement.
System Lagrangian
With the objective of constructing the system Lagrangian L
T
, we construct the
function G
B
(x,t,w,,w,,w) from the expression
(9.16)
where
(9.17)
and we have introduced the compact notation
(9.18)
In Eqs. (9.18), , w, , and w represent the beam velocity, beam slope,
beam angular velocity, and beam curvature, respectively. In Eq. (9.17), W
c
(t)
is the work done by conservative forces and it has been constructed assuming
that the work W
f
(t) done by the external loading f
c
(x,t) is conservative and that
the work W
p
(t) done by the axial loading p(x,t) is conservative.
8
After collecting the spatial integrals given by Eqs. (9.10), (9.11), (9.12a),
(9.14), and (9.15) for U(t), T(t), W
f
(t), W
p
(t), and W
k
(t), respectively, we find
from Eq. (9.16) that
(9.19)G
B
1x,t,w,w
#
,w¿,w
#
¿,w– 2
1
2
3rAw
#
2
EIw–
2
pw¿
2
k
f
w
2
4 f
c
w
w
#
¿w
#
w¿
#
0
2
w
0x0t
,
w–
0
2
w
0x
2
w
#
0w
0t
,
w¿
0w
0x
,
W
c
1t 2 W
f
1t 2 W
p
1t 2 W
k
1t 2
L
0
G
B
1x,t,w,w
#
,w¿,w
#
¿,w– 2dx T1t 2 U1t 2 W
c
1t 2
w
#
¿w
#
W
k
1t 2
1
2
L
0
k
f
w
2
1x,t 2dx
548 CHAPTER 9 Vibrations of Beams
7
This type of elastic foundation is frequently used to model structures on soil and it is often re-
ferred to as a Pasternak foundation.
8
Conservative forces were first mentioned in Section 2.3, where it was noted that forces
expressed in terms of a potential function, such as a spring force or a gravity loading, are con-
servative. On the other hand, dissipative loads such as those due to dampers and time-dependent
loads such as harmonic excitations are nonconservative.

In Eq. (9.19), there is no term, since we have neglected the rotary inertia
of the beam cross-section in the development.
On the boundaries of the beam at x 0 and x L, one can have discrete
external elements that contribute to the total kinetic energy and the total
potential energy of the system. Consider, for example, the beam shown in
Figure 9.4. At the left boundary (x 0), there is a linear translation spring
with stiffness k
1
and a linear torsion spring with stiffness k
t1
. Similarly, at
the right boundary (x L), there is a linear translation spring with stiffness k
2
and a linear torsion spring with stiffness k
t2
. There is also an inertia element
with mass M
1
and rotary inertia J
1
at the left boundary and an inertia element
with mass M
2
and rotary inertia J
2
at the right boundary. There are also linear
viscous dampers with damping coefficients c
1
at x 0 and c
2
at x L. Tak-
ing the difference between the kinetic energy of the inertia element at the left
boundary and the potential energy of the stiffness elements at the left bound-
ary in Figure 9.4, we obtain the discrete Lagrangian function
(9.20)
Translational Rotational Potential Potential
kinetic energy kinetic energy energy of energy of
of rigid body of rigid body translation torsion spring
spring
where the subscript 0 has been used to denote that the quantity is evaluated at
x 0; that is, w
0
w(0,t) indicates the displacement at the boundary x 0,
indicates the slope at the boundary x 0, and so on. Also,
the translational velocity of the center of mass of the rigid body is denoted as
, the angular displacement of the torsion spring is denoted as , and the an-
gular velocity of the rigid body is denoted as . Similarly, the discrete
Lagrangian function corresponding to the right boundary x L is given by
(9.21)
Translational Rotational Potential Potential
kinetic energy kinetic energy energy of energy of
of rigid body of rigid body translation torsion spring
spring
where the subscript L has been used to denote that the quantity is evaluated at
x L; that is, w
L
w(L,t) indicates the displacement at the boundary x L,
G
L
1t,w
L
,w
#
L
,w¿
L
,w
#
¿
L
2
1
2
M
2
w
#
2
L
1
2
J
2
w
#
¿
2
L
1
2
k
2
w
2
L
1
2
k
t2
w¿
2
L
w
#
¿
0
w¿
0
w
#
0
w¿
0
0w10,t2/0x
G
0
1t,w
0
,w
#
0
,w
0
¿,w
#
0
¿ 2
1
2
M
1
w
0
#
2
1
2
J
1
w
#
0
¿
2
1
2
k
1
w
2
0
1
2
k
t1
w
0
¿
2
w
#
¿
9.2 Governing Equations of Motion 549
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
⎫
⎬
⎭
x 0 x L
k
1
k
2
c
1
c
2
k
t1
k
t2
M
1
, J
1
M
2
, J
2
FIGURE 9.4
Beam with discrete elements at the
boundaries.