Awrejcewicz J. Numerical Simulations of Physical and Engineering Processes
Подождите немного. Документ загружается.

Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems 3
0.01 0.1 1 10 100
1. 10
-6
0.0001
0.01
1
r/a
n
KM
(r)/n
KM
(0)
W(0)=2
W(0)=10
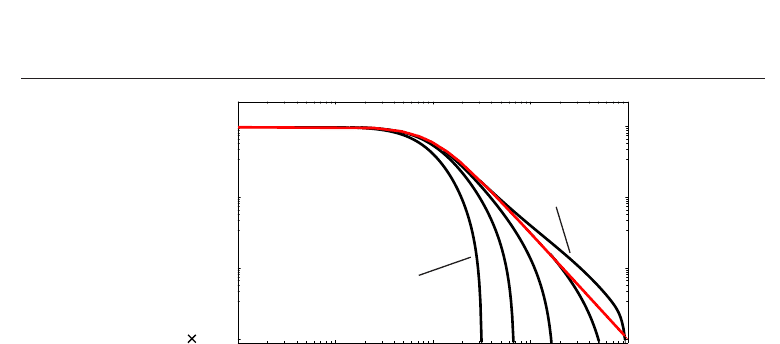
Fig. 1. Black curves denote the number density of the King model n
KM
(r) as a function of the
radius normalized with the core radius, r/a,forseveralW
(0). As the curve changes from left
to right, W
(0) gets larger from 2 to 10 in steps of 2. The red curve means the approximated
formula, 1/
(1 + r
2
/a
2
)
3/2
,forlargerW(0).
words the additive noise, can unveil the dynamics toward the steady state described by the
Maxwell-Boltzmann distribution. However, we cannot introduce the randomness into the
system without any evidence. Then, we must confirm that each orbit is random indeed. Of
course, it is impossible to understand orbits of stars in globular clusters from observations.
Thus, we must use numerical simulations.
From the numerical simulations of SGS, the ground that we can use the random noise becomes
clear. The special Langevin equation includes additive and multiplicative noises. By using
this stochastic process, we derive that non-Maxwell-Boltzmann distribution of SGS especially
around the origin. The number density can be obtained through the steady state solution
of the Fokker-Planck equation corresponding to the stochastic process. We exhibit that the
number density becomes equal to the density profiles around the origin, Eq. (7), by adjusting
the friction coefficient and the intensity of the multiplicative noise.
Moreover, we also show that our model can be applied in the system which has a heavier
particle (5-10 times as heavy as the surrounding particle). The effect of the heavier particle
in SGS, corresponding to a black hole in a globular cluster, has been studied for long
time. If the black hole is much heavier than other stars, a cusp of the density distribution
appears at the center of a cluster (Peebles, 1972; Bahcall & Wolf, 1976; 1977). The observations
which suggest that intermediate mass black hole (IMBH,
∼ 10
2
−10
3
M
)isintheglobular
cluster in recent years are accomplished one after another (Clark et al., 1975; Newell et al.,
1976; Djorgovski & King, 1984; Gebhardt et al., 2002; Gerssen et al., 2002; Noyola et al., 2008).
Although these studies are very interesting, our model does not treat these situations: in our
model, the heavier particle is too lighter than IMBH. Our model corresponds small globular
cluster (10
4
stars) with only a stellar black hole ( 1 −10M
).
Here, note that we have reported similar results in our previous letter (Tashiro & Tatekawa,
2010). In this paper, however, we demonstrate how we executed our numerical simulations.
Moreover, a treatment for stochastic differential equations becomes precise, and so the
analytical result derived by a different method changes a little.
303
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems

4 Will-be-set-by-IN-TECH
This paper is organized as follows. In Sec. 2.1, and Sec. 2.2, we provide brief explanations
about a machine and a method we used when we did numerical simulations, respectively. In
Sec. 2.3, we investigate number densities derived from our numerical simulations where all
particles of SGS with a mass m and a particle with a mass M interact via the gravitational
force. Then, we show the densities are like that of the King model and both the exponent and
the core radius are dependent on M. In Sec. 3.1, forces influencing each particle of SGS are
modeled. Then, using these forces, Langevin equations are constructed in Sec. 3.2. Section 3.3
makes it clear that the steady state solution of the corresponding Fokker-Planck equation gives
the same result with the King model. In Sec. 4, we discuss our results and make the relation
between King’s procedure and our idea clear. Section 5 gives a summary of this work.
2. Numerical simulations of SGS using GRAPE
2.1 GRAPE
SGSs require quite long time for relaxation. Furthermore, because only attractive force is
exerted on particles in SGS and the gravitational potential is asymptotically flat, we must
compute interaction of all particle pairs. When we treat N particles, the computation
of interaction becomes O
(N
2
) by direct approach. By these reasons, we require huge
computation for numerical simulation of the evolution of SGS.
For time evolution of SGS, many improvements of algorithm and hardware have been carried
out. First, we consider integrator for simulation. For long-time evolution, both the local
truncation error and the global truncation error are noticed. These error occur deviation of the
conservation physical quantities such as total energy. For compression of the global truncation
error, symplectic integrator has been developed. The symplectic integrator conserves the
total energy for long-time evolution. We apply 6th-order symplectic integrator for the time
evolution of SGS. Secondly, we apply special-purpose processor for the computation of the
interaction. Most of the computation of the time evolution in SGS is 2-body interaction.
As special-purpose processors, GRAPE system has been developed (Sugimoto et al., 1990).
GRAPE system can compute 2-body interaction from position and mass of particles quickly. In
our study, we apply GRAPE-7 chip, which consists of Field-Programmable Gate Array (FPGA)
for computation of the interaction (Kawai & Fukushige, 2006). GRAPE-7 chip implements
GRAPE-5 compatible pipelines
1
. The performance of GRAPE-7 chip is approximately 100
GFLOPS and is almost equal to a processor of present supercomputers, but the energy
consumption of the chip is only 3 Watts. Using sophisticated integrator and special-purpose
processor, we have analyzed time evolution of SGS.
2.2 Symplectic integrator
For time evolution, we must choose reasonable integrator for simulation. For long-time
evolution, not only the local truncation error but also the global truncation error is noticed.
For example, 4th-order Runge-Kutta method has been applied for time evolution of physical
systems (Press et al., 2007). Although its local truncation error is O
(Δt)
5
,becauseitserror
accumulates, the global truncation error increases during time evolution. For example, we
1
GRAPE-5 computes low-accuracy 2-body interaction. If we treat collisional systems, i.e., the
effect of 2-body relaxation cannot be neglected, we should use high-accuracy chip such as
GRAPE-6 (Makino et al., 2003). As we will mention later, because our simulation notices until 100 t
ff
,
we can simulate the systems with GRAPE-7 chip.
304
Numerical Simulations of Physical and Engineering Processes
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems 5
apply 4th-order Runge-Kutta method for the harmonic oscillation.
H
=
p
2
2
+
q
2
2
.(8)
Using exact solutions, the orbit of the harmonic oscillation in the phase space draws a circle.
Of course, the total energy is conserved. On the other hand, when we apply 4th-order
Runge-Kutta method for time evolution, the total energy is decreased monotonically.
H
(t)=
1
2
1
−
1
72
(
Δt
)
6
+ O
(
Δt
)
7
p
2
+ q
2
.(9)
The orbit of the harmonic oscillation in the phase space draws a spiral and it converges
to origin (p
= q = 0). When we consider long-time evolution, 4th-order Runge-Kutta
method is not reasonable integrator. If Hamiltonian of physical system is given, we can apply
symplectic integrator which based on canonical transformation (Ruth, 1983; Feng & Qin,
1987; Suzuki, 1992; Yoshida, 1993). This method suppresses increase of the global truncation
error. In generic case, the symplectic integrator is implicit method. If Hamiltonian is
divided to coordinate parts and momentum parts, the integrator becomes explicit method.
The procedure of low-order integration becomes easy more than Runge-Kutta method. The
simplest integrator is called "leap-flog method" (2nd-order integrator).
p
t
+
Δt
2
= p(t)+
Δt
2
˙
p
(
x(t)
)
, (10)
x
(t + Δt)=x(t)+Δt · p
t +
Δt
2
, (11)
p
(t + Δt)=p
t +
Δt
2
+
Δt
2
˙
p
(
x(t + Δt)
)
. (12)
Using leap-flog method for the harmonic oscillator, the following equation is satisfied.
1
2
(p
2
+ q
2
)+
Δt
2
pq
= const. . (13)
Therefore the orbit in the phase space draws an oval. The deviation from the exact solution is
suppressed. To suppress the local truncation error, higher-order symplectic integrators have
been developed. We apply 6th-order symplectic integrator for time evolution of SGS (Yoshida,
1990).
p
i
= q
i−1
+ c
i
Δt
˙
p(q
i−1
)(1 ≤ i ≤ 8) , (14)
q
j
= p
j−1
+ d
j
Δtp
j
(1 ≤ j ≤ 7) , (15)
where p
0
= p(t), q
0
= q(t), p
8
= p(t + Δt), q
7
= q(t + Δt). The coefficients c
j
,andd
j
are
shown in Tab. 1.
The symplectic integrator conserves the total energy and the symplectic structure in
generic cases. When we use n-th order symplectic integrator, the local truncation error
of the total energy becomes O
(Δt)
n+1
. Furthermore, the global truncation error is not
accumulated (Sanz-Serna, 1988).
305
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems
6 Will-be-set-by-IN-TECH
ic
i
d
i
1 0.39225680523878 0.78451361047756
2 0.510043411918458 0.0235573213359357
3
−0.471053385409757 −1.17767998417887
4 0.06875316825252 1.31518632068391
5 0.06875316825252
−1.17767998417887
6
−0.471053385409757 0.0235573213359357
7 0.510043411918458 0.78451361047756
8 0.39225680523878
Table 1. Coefficients of 6th-order symplectic integrator (Solution A in (Yoshida, 1990)).
In SGS, because the interaction at zero distance diverges, the local truncation error
would diverge in long-time evolution. For avoidance of this divergence, some kind of
softening parameter has been introduced to gravitational interaction. When the nature
of the pure gravity is analyzed, the regularization procedure of interaction is required
(Kustaanheimo & Stiefel, 1965; Aarseth, 2003).
2.3 Steady number density in numerical simulation
Now, we investigate the steady number density (SND) of the SGS with a mass m including
a particle with a mass M by numerical simulation. In particular, we show that SNDs have a
core and behave as a power law outside the core.
The system is composed of N
= 10000 particles. At t = 0, all velocities of the particles are
zero and they are distributed by n
0
(r) ∝ (1 + r
2
/a
p
2
)
−5/2
(0 ≤ r ≤ 4a
p
), which is the density
in real space of Plummer’s solution (Binney & Tremaine, 1987). In this SGS, we put another
particle with a mass M in the origin at t
= 0. We shall change the mass as M/m = 1, 5, and 10.
Throughout this paper, we adopt a unit system where the core radius of Plummer’s solution
a
p
, the initial free fall time t
ff
, and the total mass N · m are unity.
We started the numerical simulation under these conditions. For dynamical evolution, we
used GRAPE-7 at Center for Computational Astrophysics, CfCA, of National Astronomical
Observatory of Japan. For the computation of gravitational force, we applied Plummer’s
softening: the potential energy between the ith and jth particles separated by a distance r
ij
is
−Gm
2
/
r
ij
2
+ ε
s
2
,whereε
s
is the softening parameter. We set ε
s
= 10
−3
. For time evolution,
we used 6th-order symplectic integrator (Yoshida, 1990). The time step for the simulation is
defined as Δt
= 10
−5
. We carried out simulations until t = 100 t
ff
. During simulations, the
error in total energy was less than 0.1%.
First, most particles collapse into the origin within several t
ff
. After approximately 20 t
ff
,the
distribution becomes stable and the system reaches the steady state. Of course, we can confirm
whether the system becomes steady or not from the profile of the number density. However,
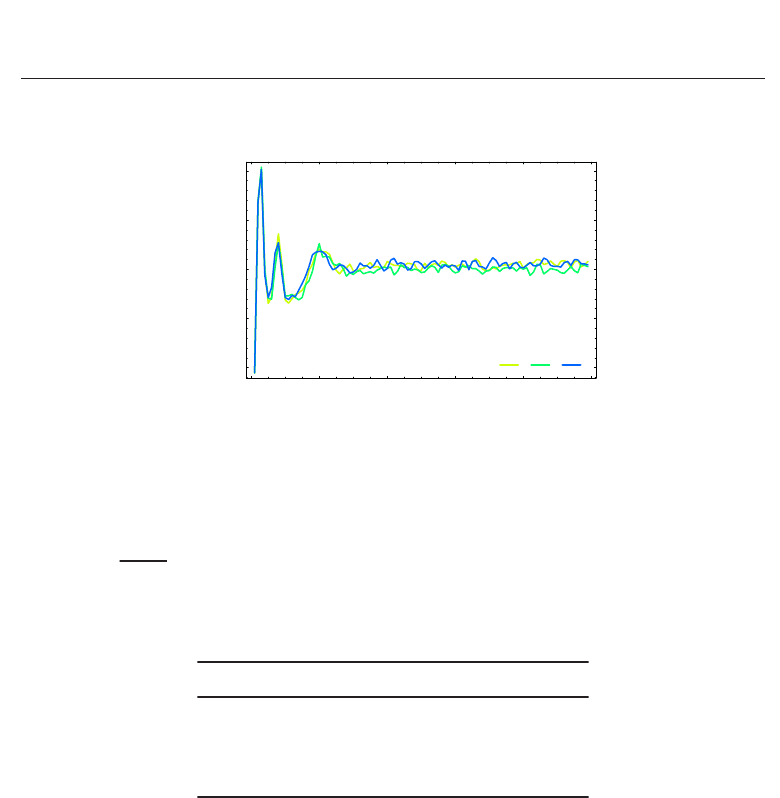
furthermore we also focus on the number of particles inside a sphere. Figure 2 shows the
change of the number inside the sphere with a radius 1 in time. During the collapse, the
number becomes large. After that, the number decreases, which means that many particles
306
Numerical Simulations of Physical and Engineering Processes
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems 7
with positive energy evaporated from inside of the sphere, and so the number becomes about
6000 on average. For other radii, similar changes of the number in time can be seen.
0 20 40 60 80 100
t
5000
5500
6000
6500
7000
number of particles
1m 5m 10m
Fig. 2. Change of the number of particles inside a sphere with a radius 1 in time for
M/m
= 1, 5, and 10.
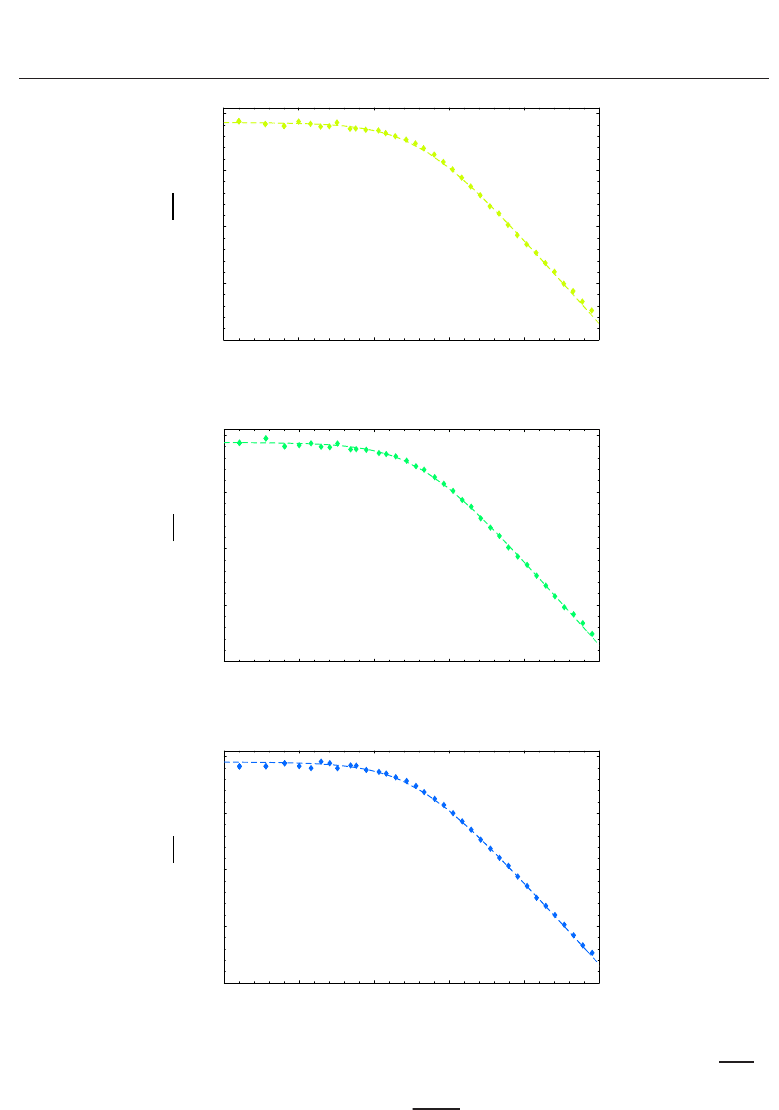
SND is calculated by taking the time average during the steady state. In Fig. 3, we show the
logarithm of SND as a function of log r for M/m
= 1, 5, and 10. For each M,theSNDhasa
core and behaves as a power law at r larger than the core radius. Here, we fit SNDs around
the core by
n
fit
(r)=C/(1 + r
2
/a
2
)
κ
. The results are summarized in Tab. 2. For M/m = 1
and 5, κ
3/2, which is similar to the exponent of the King model. The density at the origin
C increases as M increases, which is simply understood to be a result of many particles being
attracted by the heavier particle.
M/ma× 10
2
κ C × 10
−5
16.20±0.22 1.46 ±0.03 7.06 ±0.14
56.06
±0.18 1.46 ±0.02 7.57 ±0.13
10 5.68
±0.14 1.43 ±0.02 8.13 ±0.12
Table 2. Best-fit parameters of the function C/(1 + r
2
/a
2
)
κ
for steady number densities
shown in Fig. 3
3. Simple model
3.1 Forces acting on each particle of SGS
As shown in the last section, SND is the King-like profile even though the system includes
the heavier particle. In this section, in order to explain these results and derive this
non-Maxwell-Boltzmann distribution around the origin, we demonstrate a simple model
based on stochastic process, which is quite different from the King model.
The reason why stochastic process appears in the SGS is as follows. After the collapse, the
density around the origin becomes high. Thus, the particles around the region disturb the
307
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems
8 Will-be-set-by-IN-TECH
-2 -1.5 -1 -0.5 0
log r
3
4
5
6
logn(r)
M=1m
(a)
-2.5
-2 -1.5 -1 -0.5 0
3
4
5
6
log r
logn(r)
M=5m
(b)
-2.5
-2 -1.5 -1 -0.5 0
3
4
5
6
-2.5
log r
logn(r)
M = 10m
(c)
Fig. 3. Logarithm of the steady number density derived from our numerical simulation, n(r),
as a function of log r for (a) M/m
= 1, (b) M/m = 5, and (c) M/m = 10. In each figure, the
dashed curve and symbols denote a fitting curve
n
fit
(r)=C/(1 + r
2
/a
2
)
κ
and the result of
our numerical simulation, respectively.
308
Numerical Simulations of Physical and Engineering Processes
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems 9
orbits of other particles repeatedly, so that their movements become random
2
.Asthetime
at which this disturbance occurs, we introduce the local 2-body relaxation time t
rel
(Spitzer,
1987):
t
rel
(r)=
0.065σ(r)
3
G
2
n(r)m
2
ln(1/ε
s
)
, (16)
where σ
(r) is the standard deviation of the velocity at r;weadoptedln(1/ε
s
) as the Coulomb
logarithm.
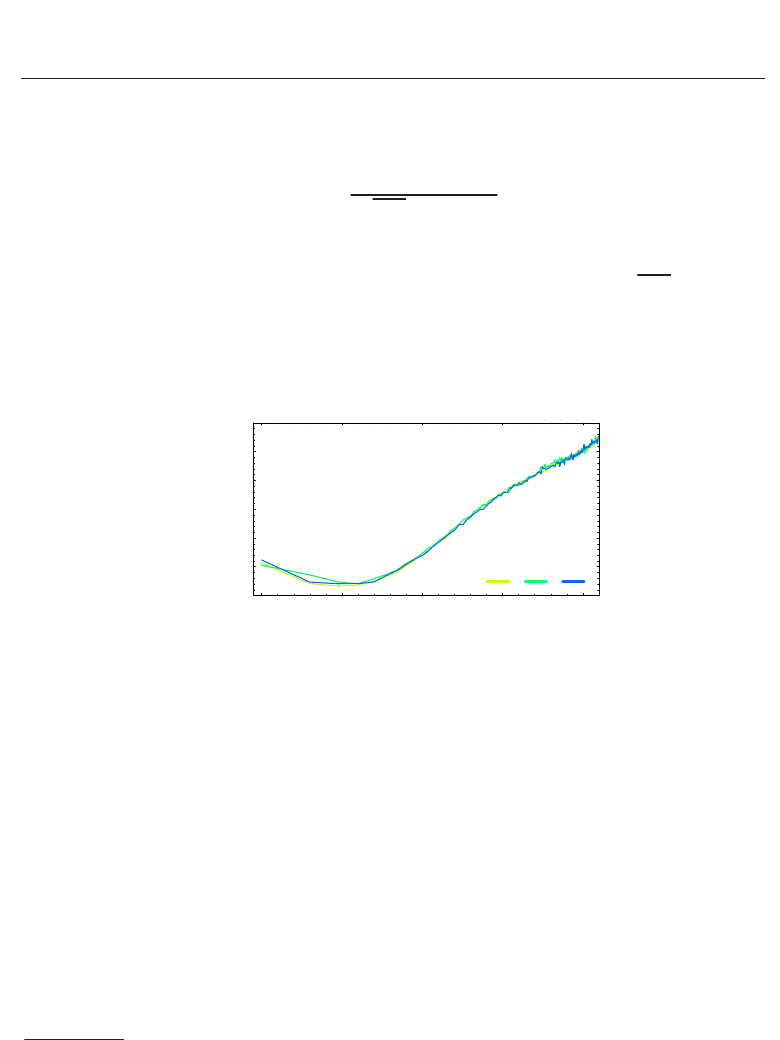
Figure 4 shows the logarithm of t
rel
, which is calculated using the σ(r) and n(r) during the
steady state obtained from our numerical simulation, as a function of log r.Asexpected,t
rel
around the origin is short. Our simulation continues after the collapse at about 80 t
ff
,which
is sufficiently longer than the t
rel
around the core. As radius increases, however, t
rel
becomes
longer than the rest of our simulation time, which means that no stochastic motion occurs at
alarger. Therefore, note that our model is valid only in the neighborhood of the core.
-2 -1.5 -1 -0.5 0
logr
1.0
1.5
2.0
2.5
3.0
logt
rel
1m 5m 10m
Fig. 4. Logarithm of the local 2-body relaxation time t
rel
as a function of log r for M/m = 1, 5,
and 10.
When constructing our model, the following points are premised: the model describes the
stochastic dynamics near the steady state and the mean distribution is spherically symmetric.
As is well known, the gravitational force at r arising from such a spherically symmetric system
depends only on the particles existing inside a sphere with a radius r, and this attractive force
acts along the radial direction. In other words, this mean force
−F(r) is the gradient of the
mean potential:
−F(r)=−m∂Φ(r)/∂r (< 0). Indeed, lim
r→0
F(r)=0. Hence, F( r) can be
expanded around the origin as
F
(r)=c
0
r + O( r
3
) . (17)
It will be clarified later that the lowest exponent must be 1 and the coefficient c
0
is related to
the number density at the origin C as
c
0
= 4πGm
2
C/3 . (18)
2
Generally, a particle going into a region where the gravitational potential is deep, e.g. the core of SGS,
attains a high velocity. Because of many disturbances around the core, however, the mean velocity
of the particle decreases, which is, naively speaking, the dynamical friction (Binney & Tremaine, 1987).
Therefore, even though the heavier particle at the origin of the system makes the gravitational potential
deeper, there are few particles that can escape from the core smoothly. Then more particles are drawn
toward the heavier particle.
309
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems
10 Will-be-set-by-IN-TECH
For M/m = 1, we can identify another particle together with the other particles. Contrary
to this, we must consider the effect of the particle in the case M/m
= 1. Now, we suppose
that the heavier particle exists at the origin. Then, the attractive force by this particle at r is
−F (r)=−GmM/r
2
. We can estimate F(r) around this region as F(r) ∼ c
0
r = 4πGm
2
Cr/3,
whereweusedEq.(18). Thus,F
(r)/F(r) ∼ 3Mr
−3
/4πCm. This ratio becomes significant
when r
10
−2
,sinceC ∼ 10
6
asshowninTab.2. Therefore,ifr is smaller than the radius,
particles are influenced by not only F
(r) but also F (r), so that the core disappears. In fact, we
have performed a numerical simulation with the heavier particle fixed at the origin, where this
result is confirmed. On the other hand, Miocchi improved the King model in order to describe
the steady state of a globular cluster including an IMBH and reported that the density becomes
cuspy as the mass of the black hole increases (Miocchi, 2007). The nature of a globular cluster
when a massive black hole is much heavier than the surrounding star, have been studied as
mentioned in Introduction. In this case, the massive black hole stays at the center mostly.
Then, a cusp of the density distribution at the center appears. Because the heavier particles
in our numerical simulation are not very heavy, the particles are not trapped at the origin.
Therefore, we do not consider the effect of heavier particles explicitly and we suppose that the
particles influence SGS through the density at the origin C:asM becomes larger, it attracts
more particles and C increases, as shown in Tab. 2. Thus, c
0
is an increasing function of M.
It is natural to consider that the distribution fluctuates around the mean because of the many
disturbances. In fact, as shown in Fig. 2, the number of particles existing inside the sphere with
a radius 1 fluctuates around the mean value. The fluctuating part of the distribution should
not be spherically symmetric, so that this produces forces along not only the radial direction,
but also other directions. We assume that they are random forces and set their intensity at r
2H
(r). In addition to such random forces resulting from the fluctuating distribution, a particle
at r is expected to be influenced by random forces generated from neighboring particles. We
set the intensity 2D, which is independent of position.
3.2 Langevin equations
Stochastic dynamics under the above assumptions is described by the following Langevin
equations in spherical coordinates: the radial direction
ma
r
+ mγ
˙
r = −F(r)+
2H(r)η
r
(t)+
√
2Dξ
r
(t) , (19)
the elevation direction
ma
θ
+ mγr
˙
θ =
2H(r)η
θ
(t)+
√
2Dξ
θ
(t) , (20)
and the azimuth direction
ma
φ
+ mγr sin θ
˙
φ =
2H(r)η
φ
(t)+
√
2Dξ
φ
(t) , (21)
where a
r
, a
θ
,anda
φ
are accelerations along those directions; γ is the coefficient of
dynamical friction in the low velocity limit, independent of velocity (Binney & Tremaine,
1987). In the Chandrasekhar dynamical friction formula, the coefficient is more
complicated (Binney & Tremaine, 1987; Chandrasekhar, 1943). However, we use the
coefficient in such a limit, because the density around the core is so high that particles around
there move slowly.
310
Numerical Simulations of Physical and Engineering Processes
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems 11
Now, we focus on the overdamped limit of these equations, because we have interests in
the stochastic dynamics near the steady state. In the case of the normal Langevin equation
with a constant-intensity noise, we only neglect the inertial term. But, as for special Langevin
equations with noises whose intensity depends on a position, the new force
−∇H(r)/2mγ
should be considered additionally
3
. Thus, the Langevin equations in the overdamped limit
becomes as follows:
radial direction : mγ
˙
r
= −F(r)+
2H(r)η
r
(t)+
√
2Dξ
r
(t) −
1
2mγ
H
(r) , (22)
elevation direction : mγr
˙
θ
=
2H(r)η
θ
(t)+
√
2Dξ
θ
(t) , (23)
azimuth direction : mγr sin θ
˙
φ
=
2H(r)η
φ
(t)+
√
2Dξ
φ
(t) , (24)
where the prime indicates a derivative with respect to r. The noises in each Langevin equation,
ξ
i
(t) and η
j
(t)(i, j = r, θ,and φ), are zero-mean white Gaussian and correlate only with
themselves. Indeed, the correlation function is the Dirac delta function
4
.
Here, revisit the position-dependent intensity noise. We have introduced such a noise in order
to represent a random force originating from the fluctuation of the distribution around the
mean value which yields the mean force
−F(r). Thus, the first and the second terms on the
right-hand side of Eq. (22) must denote that the mean force acting along radial direction is
fluctuating. As a minimal formulation describing this situation, we propose the following
one:
− F(r){1 −
√
2η
r
(t)} , (25)
in which is a positive constant. This can be realized by setting
H
(r)=F(r)
2
. (26)
Note that this fluctuating mean force is the essential feature for SGS. Since the gravitational
force is a long-range one, each particle is influenced from the whole system. The mean force
is produced by the mean potential which is decided by the number density in the steady state
through the Poisson equation. Obviously, this number density determines only the mean
positions of the particles, and they do not remain stationary at those positions: they fluctuate.
Then, the mean force also fluctuates. indicates the extent of fluctuations. If is 0, that is,
means the mean force does not fluctuate, the stochastic dynamics of each particle is governed
only by the constant-intensity random force originating from the neighboring particles. Then,
the Maxwell-Boltzmann distribution is obtained as the steady solution, by which the number
density of globular clusters cannot be explained as written in Introduction.
3
This force is necessary in order to interpret products in theses Langevin equations as Storatonovich
ones in the corresponding stochastic differential equations. See details in Ref. (Sekimoto, 1999).
4
It may not be natural that correlations of the random forces generated from the gravity are described
by the Dirac delta function. But in this paper, for simplicity, the correlation times are assumed to be
negligible. In other words, the time resolution of our simple model in the over-damped limit is assumed
to be much longer than the correlation times.
311
Stochastic Dynamics Toward the Steady State of Self-Gravitating Systems
12 Will-be-set-by-IN-TECH
3.3 Fokker-Planck equation and the asymptotic steady solution around the origin
From the Langevin equations (22), (23), and (24), we obtain the Fokker-Planck equation
governing the spherically symmetric probability distribution function (PDF) P
(r, t)
∂
∂t
P
(r, t)=
D
(mγ)
2
∂
2
∂r
2
+
2
r
∂
∂r
P
(r, t)+
1
mγ
1
r
2
∂
∂r
r
2
F(r)P(r, t)
+
(mγ)
2
∂
2
∂r
2
F(r)
2
+
2
r
∂
∂r
F
(r)
2
P
(r, t) ,
in which we have replaced H
(r) by F(r) using Eq. (26). Then, the PDF with the Jacobian
ρ
(r, t) ≡ 4πr
2
P(r, t) satisfies the following Fokker-Planck equation.
∂
∂t
ρ
(r, t)=
D
(mγ)
2
∂
2
∂r
2
−
∂
∂r
2
r
ρ
(r, t)+
1
mγ
∂
∂r
F
(r)ρ(r, t)
+
(mγ)
2
∂
2
∂r
2
−
∂
∂r
2
r
F
(r)
2
ρ(r, t) (27)
This equation is useful when integrating with respect to r.
The steady state solution ρ
st
(r) satisfies Eq. (27) with the left-hand side zero. By integrating
the equation with respect to r,wehave
D
(mγ)
2
+
(mγ)
2
F(r)
2
ρ
st
(r)
−
D
(mγ)
2
2
r
−
(mγ)
2
2F
(r)F
(r) −
2
r
F
(r)
2
−
F(r)
mγ
ρ
st
(r)=const. . (28)
Now, we impose the binary condition that P
st
(r) ≡ ρ
st
(r)/(4πr
2
) and the derivative do not
diverge at the origin. Then, when r
→ 0,
ρ
st
(r)=O(r
2
) , (29)
and
lim
r→0
ρ
st
(r)=lim
r→0
4π(2rP
st
(r)+r
2
P
st
(r)) = 0 , (30)
by which the constant on the right-hand side of Eq. (28) is decided and we obtain
r
D
+ F( r)
2
ρ
st
(r)=−
rF
(r)
2F
(r)+mγ
−2
D + F(r)
2
ρ
st
(r) . (31)
Thus, if F
(r) is obtained, ρ
st
(r) can also be obtained. Here, F(r) relates with SND, n
st
(r),
through the following relation, since
−F(r)=−mΦ
(r).
F
(r)+
2
r
F
(r)=4πGm
2
n
st
(r) (32)
Incidentally, the SND can be obtained by multiplying PDF in the steady state by total number
N:
n
st
(r)=NP
st
(r)=
Nρ
st
(r)
4πr
2
. (33)
312
Numerical Simulations of Physical and Engineering Processes