Atkinson K. An Introduction to Numerical Analysis
Подождите немного. Документ загружается.

198 APPROXIMATION
OF
FUNCTIONS
Theorem 4.1 (Weierstrass) Let
f(x)
be continuous for a
~
x
~
b and let
t:
> 0. Then there
is
a polynomial
p(x)
for which
1/(x)-
p(x)
I~
€
a~x~b
Proof
There
are
many proofs of this result
and
of generalizations
of
it. Since
this is
not
central to our numerical analysis development,
we
just
indicate
a constructive proof.
For
other proofs, see Davis (1963, chap. 6).
Assume
[a,
b]
=
[0,
1]
for simplicity: by an appropriate change
of
.variables, we can always reduce to this case if necessary. Define
Pn(x) = t
(~)!(!:_)xk(1-
x)n-k
k=O
n
O~x~1
Let
f(x)
be bounded
on
[0,
1].
Then
Limitpn(x) =
f(x)
n->
oo
at
any
point
x
at
which f
is
continuous.
If
f(x)
is
continuous
at
every x
in
[0,
1], then the convergence
of
Pn
to f
is
uniform on
[0,
1],
that
is,
Max
lf(x)-
Pn(x)
I~
0
O:$x:$l
.
as n
~
oo
(4.1.1)
This
gives
an
explicit way
of
finding a polynomial that satisfies the
conclusion
of
the theorem.
The
proof
of
these results can
be
found
in
Davis (1963, pp. 108-118), along with additional properties
of
the
approximating polynomials
Pn(x), which are called the Bernstein poly-
nomials. They mimic extremely
well
the
qualitative behavior
of
the
function
f(x).
For
ex~mple,
if
f(x)
is
r times continuously differentiable
on
[0, 1], then
as
n
~
oo
But
such
an
overall approximating property has its price,
and
in this
case
the
convergence in (4.1.1)
is
generally very slow,
For
example, if
f(x)
= x
2
,
then
Limitn[pn(x)-
f(x)]
=
x(1-
x)
n->
oo
and
thus
1
p
(x)-
x
2
,;,
-x(l-
x)
n n
for
large
values of
n.
The
error does
not
decrease rapidly, even for
approximating such a trivial case as
f(x)
= x
2
•
Ill
THE WEIERSTRASS THEOREM
AND
TAYLOR'S THEOREM 199
Tayior's theorem Taylor's theorem was presented earlier, in Theorem
1.4
of
Section 1.1, Chapter
1.
It
is
the first important means for the approximation of a
function,
and
it is often used
as
a preliminary approximation for computing some
more efficient approximation. To aid in understanding why the Taylor approxi-
mation is
not
particularly efficient, consider the following example.
Example Find the error of approximating ex using the third-degree Taylor
polynomial
p
3
(x)
on the interval [
-1,
1],
expanding about
x,;,
0.
Then
with
~
between x and 0.
To
examine the error carefully,
we
bound it from above and below:
1 e
-x
4
<ex-
p
(x)
<
-x
4
24 -
3
-
24
O~x~1
e-
1
1
-x
4
<ex
-p
(x)
<
-x
4
24 -
3
-
24
-1
~X~
0
The
error increases for increasing
lxl,
and by direct calculation,
Max
lex-
p
3
1
,;,
.0516
-l:~x.s;l
(4.1.2)
(4.1.3)
The
error is
not
distributed evenly through the interval [
-1,
1]
(see Figure 4.1).
It
is much smaller near the origin than near the endpoints - 1 and
1.
This uneven
distribution
of
the error, which is typical of the Taylor remainder, means that
there are usually much better approximating polynomials of the same degree.
Further examples are given in the next section.
The
function space
C(a,b]
The set C[a, b]
of
all continuous real valued
functions
on
the interval [a,
b]
was introduced earlier in Section
1.1
of Chapter 1.
y
0.052
-1
Figure
4.1
Error curve
for
p
3
(x)
,;,
ex.
200
APPROXIMATION
OF
FUNCTIONS
With it
we
will generally use the norm
11/lloo
= Max
if(x)
I
as,xs,b
fEC[a,b]
(4.1.4)
It is called variously the
maximum norm, Chebyshev norm, infinity norm, and
uniform norm.
It
is
the natural measure
to
use
in
approximation theory, since
we
will want to determine and c0mpare
II/-
Plloo
= Max
l/(x)-
p(x)
I
a:>,xs,b
(4.1.5)
for various polynomials
p(x).
Another norm for C[a,
b]
is
introduced in Section
4.3, one that is also useful in measuring the size of
f(x)
-
p(x).
As noted earlier in Section 1.1, the maximum norm satisfies the following
characteristic properties of a norm:
11/11
= 0
if and only if f = 0
lla/11
=
Ia
III/II for all f E C[a, b] and all scalars a
II/+
gil~
11/11
+
llgll
all/,
g E
C[a,
b]
(4.1.6)
(4.1.7)
(4.1.8)
The proof
of
these properties for (4.1.4)
is
quite straightforward. And the
properties show that the norm should be thought of
as
a generalization of the
absolute value
of
a number.
Although we will not make any significant use of the idea, it
is
often useful to
regard C
[a,
b]
as a vector space. The vectors are the functions f ( x
),
a
~
x
~
b.
We define the distance from a vector f to a vector g by
D(!,
g) =
II/-
gil
(4.1.9)
which
is
in keeping with our intuition about the concept of distance in simpler
vector spaces. This is illustrated in Figure
4.2.
Using.the inequality (4.1.8),
II/-
gil= II(!-
h)+
(h-
g)
II~
II/-
hll
+
llh-
gil
D(!,
g)~
D(/,
h)+
D(h,
g)
(4.1.10)
This
is
called the triangle inequality, because of its obvious interpretation in
measuring the lengths of sides of a triangle whose vertices
are/,
g,
and
h.
The
name
"triangle
inequality"
is
also applied to the equivalent formulation (4.1.8).
0
g
Figure
4.2 Illustration for defining
distance
D(f,
g).
THE
MINIMAX APPROXIMATION PROBLEM 201
Another useful result
is
the reverse triangle inequality
III/II
-
II
gill
.:-:;
II/-
gil
To
prove it, use (4.1.8) to
give
By
the symmetric argument,
IIIII
.:-:;
Ill-
gil+
II
gil
IIIII
-
II
gil
.:-:;
Ill-
gil
II
gil
-
IIIII
.:-:;
llg
-Ill
=
Ill-
gil
(4.1.11)
with the last equality following from (4.1.7) with a =
-1.
Combining these two
inequalities proves
(4.1.11).
A more complete introduction to vector spaces (although only finite dimen-
sional) and to vector norms
is
given in Chapter
7.
And some additional geometry
for C[
a, b]
is
given
in
Sections 4.3 and
4.4
with the introduction of another
norm, different from
(4.1.4). For cases where
we
want to talk about functions that
have several-continuous derivatives,
we
introduce the function space
cr[a,.b],
consisting of functions
f(x)
that have r continuous derivatives on
[a,
b]. This
function space
is
of
independent interest, but
we
regard it
as
just a simplifying
notational device.
4.2 The Minimax Approximation Problem
Let
f(x)
be continuous on [a, b]. To compare polynomial approximations
p(x)
to
f(x),
obtained by various methods, it
is
natural to ask what
is
the best possible
accuracy that can be attained
by
using polynomials of each degree n
~
0.
Thus
we
are lead to introduce the
minimax
error
Pn(/)
= Infimum
!I/-
qlloo
deg(q):Sn
(4.2.1)
There does not exist a polynomial
q(x)
of
degree.:;;;
n that can approximate
f(x)
with a smaller maximum error than
Pn(f).
Having introduced
Pn(f),
we
seek whether there
is
a polynomial
q:(x)
for
which
(4.2.2)
And if so,
is
it unique, what are its characteristics, and how can it be constructed?
The approximation
q:(
x)
is
called the
minimax
approximation to
[(
x)
on [a, b
],
and its theory
is
developed in Sectiqn
4.6.
Example
Compute the minimax polynomial approximation
q;'(x)
to ex on
-1
.:;;;
x.:;;;
1.
Let
qf(x)
= a
0
+ a
1
x. To find a
0
and a
1
,
we
have to use some
geometric insight. Consider the graph of
y =
ex
with that of a possible ap-
202 APPROXIMATION OF FUNCTIONS
.V
=
cr
-1
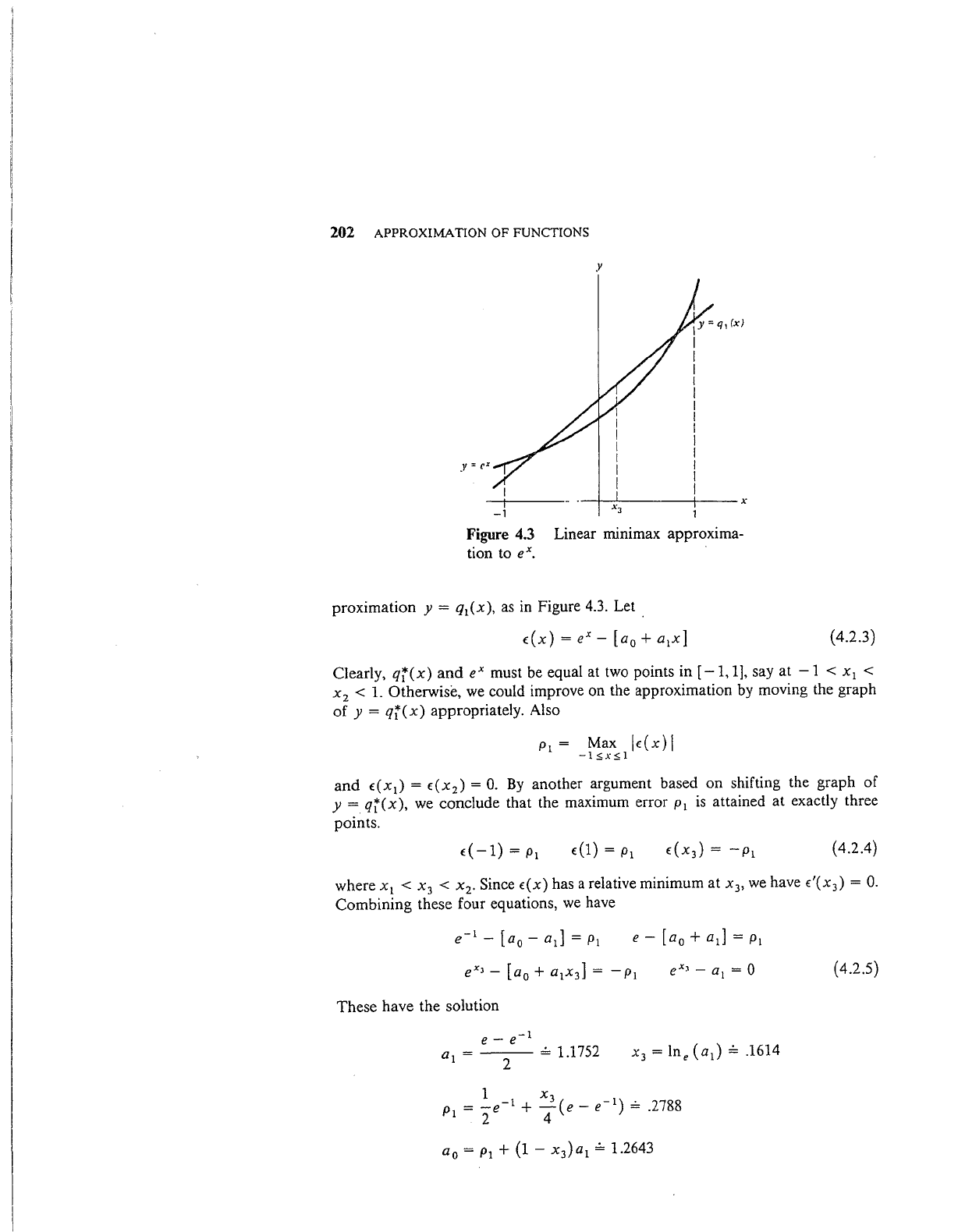
Figure
4.3
tion to
ex.
y
--~XLJ-------41-----X
Linear minimax approxima-
proximation
y = q
1
(x),
as in Figure 4.3. Let
t:(x)
=ex-
[a
0
+ a
1
x]
(4.2.3)
Clearly,
qf(x)
and
ex must be equal at two points in [
-1,
1],
say at
-1
< x
1
<
x
2
< 1. Otherwise,
we
could improve on the approximation by moving the graph
of
y =
qf(x)
appropriately. Also
p
1
= Max lt:{x)j
-1sxs1
and
t:(x
1
)
= t:{x
2
)
=
0.
By
another argument based
on
shifting the graph
of
y =
qf(x),
we conclude that the maximum error p
1
is
attained at exactly three
points.
t:(-1)=pl
(4.2.4)
where
x
1
< x
3
< x
2
•
Since t:{x) has a relative minimum at x
3
,
we
have t:'{x
3
)
=
0.
Combining
these four equations,
we
have
(4.2.5)
These
have the solution
a
1
=
--
2
---
= 1.1752
1
X
p
1
=
-e-
1
+
_2(e-
e-
1
)
= .2788
2 4
a
0
= P
1
+
(1-
x
3
)a
1
= 1.2643
Thus
and
p
1
,;,
.2788.
THE MINIMAX APPROXIMATION PROBLEM
203
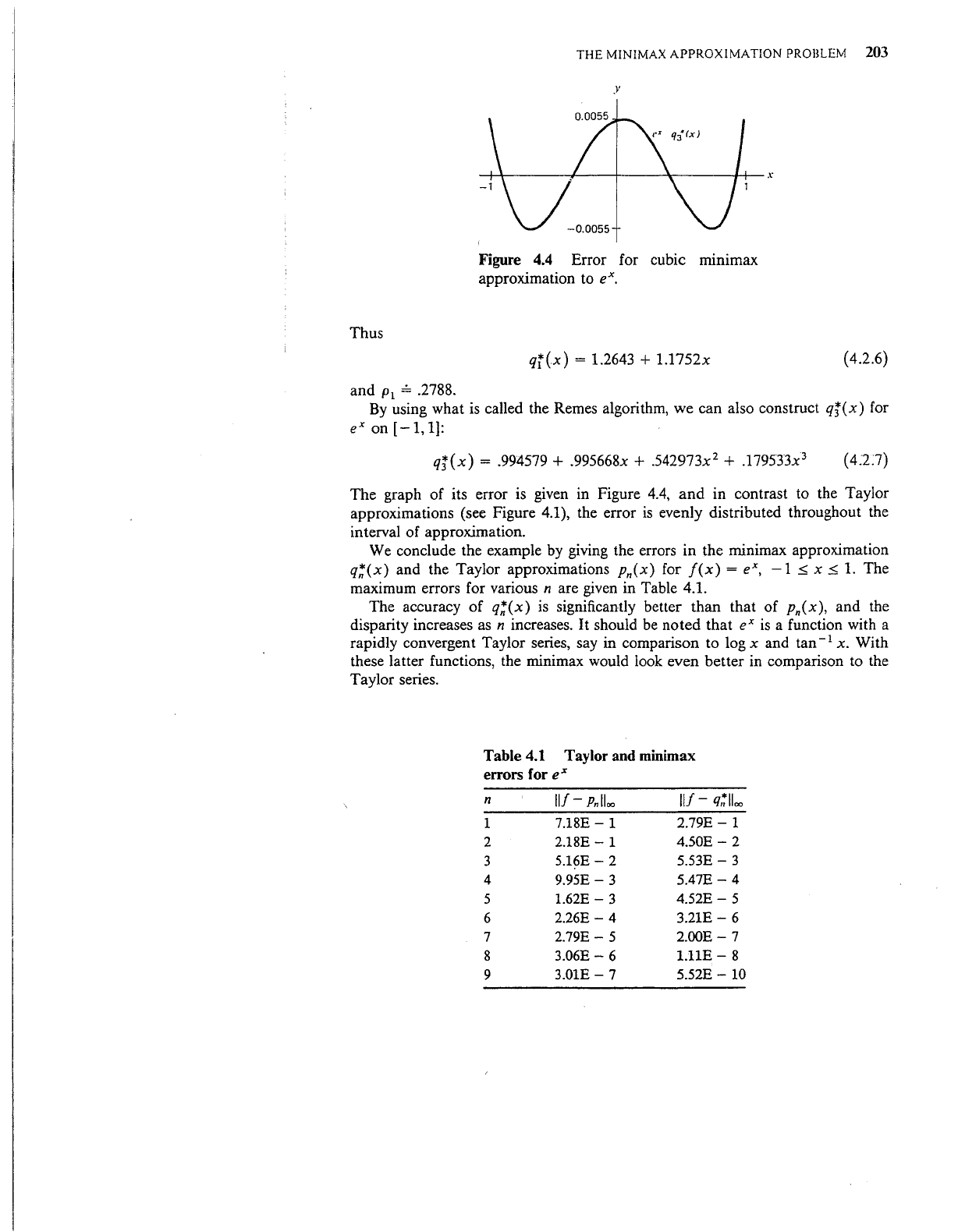
y
Figure 4.4 Error for cubic minimax
approximation to
ex.
qf(x)
= 1.2643 + 1.1752x
(4.2.6)
By
using what
is
called the Remes algorithm, we can also construct
qj(x)
for
ex on [
-1,
1]:
qj(x)
= .994579 + .995668x + .542973x
2
+ .179533x
3
( 4:2:7)
The graph of its error
is
given
in
Figure
4.4,
and
in contrast to the Taylor
approximations (see Figure 4.1), the error
is
evenly distributed throughout the
interval of approximation.
We
conclude the example
by
giving the errors in the minimax approximation
q~(x)
and the Taylor approximations Pn(x) for
f(x)
=eX,
-1
~
x
~
1.
The
maximum errors for various
n are given in Table 4.1.
The accuracy of
q!(x)
is
significantly better than that of Pn(x), and the
disparity increases as
n increases.
It
should
be
noted that ex
is
a function with a
rapidly convergent Taylor series, say in comparison to log
x and tan
-l
x.
With
these latter functions, the minimax would look even better
in
comparison to the
Taylor series.
Table 4.1
Taylor
and
minimax
errors for ex
n
II/-
Pnlloo
II/-
q,;lloo
1
7.18E-
1
2.79E-
1
2
2.18E-
1
4.50E-
2
3
5.16E-
2
5.53E-
3
4
9.95E-
3
5.47E-
4
5
1.62E-
3
4.52E-
5
6
2.26E-
4
3.21E-
6
7
2.79E-
5
2.00E-
7
8
3.06E-
6
l.IIE-8
9
3.01E-
7
5.52E-
10
204 APPROXIMATION
OF
FUNCTIONS
4.3 The Least Squares Approximation Problem
Because
of
the
difficulty in calculating the
minimax
approximation,
we
often go
to
an
intermediate
approximation called
the
least squares approximation. As
notation,
introduce
gEC[a,b]
(4.3.1)
This
is a
function
norm,
satisfying
the
same
properties (4.1.6)-(4.1.8) as the
maximum
norm
of
(4.1.4).
It
is a generalization
of
the ordinary Euclidean
norm
for
Rn, defined in (1.1.17). We
return
to
the
proof
of
the triangle inequality
(4.1.8)
in
the
next
section when we generalize
the
preceding definition.
For
a given f E C[a, b]
and
n
;;::
0, define
Mn(!) =
Infimum
!If-
r!l
2
deg(r):>n
(4.3.2)
As
before,
does
there exist a polynomial
rn*
that
minimizes this expression:
(4.3.3)
Is
it
unique?
Can
we calculate it?
To
further
motivate (4.3.2), consider calculating an average
error
in
the
approximation
of
f(x)
by
r(x).
For
an
integer m
;;::
1,
define the nodes
xj
by
j =
1,2,
...
, m
These
are
the
midpoints
of
m evenly
spaced
subintervals
of
[a, b].
Then
an
average error
of
approximating
f(x)
by
r(x)
on
[a,
b]
is
1/2
E = Limit {
2_
f
[J(x)-
r{x)r}
m-+oo
m
j=l
{
1 m ( b _ a ) }
1
1
2
=Limit
-b
_ L
[f(x)-
r{x))
2
--
m-+oo
aj=l
m
=
~
/Jbif(x)-
r(x)
1
2
dx
b-
a a
E
=!If-
rib
vb-
a
(4.3.4)
Thus
the
least
squares
approximation should have a small average
error
on
[a,
b].
The
quantity
E is called the root-mean-square error in
the
approximation
of
f(x)
by
r(x).
THE
LEAST SQUARES APPROXIMATION PROBLEM 205
Example
Let
f(x)
=ex,
-1
.$
x
.$
1,
and let r
1
(x)
= b
0
+ b
1
x. Minimize
(4.3.5)
If
we expand the integrand and break the integral apart, then
F(b
0
,
b
1
)
is
a
quadratic polynomial in the
two
variables b
0
, b
1
,
F-
j
1
{
e
2
x + b
2
+ b
2
x
2
-
2b
xex
+ 2b b
X}
dx
- 0 1 0
01
-1
To
find a minimum,
we
set
8F
-=0
8b
0
which is a necessary condition at a minimal point. Rather than differentiating in
the previously given integral,
we
merely differentiate through the integral in
(4.3.5),
Then
1
!1
b
0
=-
ex
dx
=
sinh(1)
= 1.1752
2
-1
311
b
1
= -
xex
dx =
3e-
1
= 1.1036
2
-1
r{(x) = 1.1752 + 1.1036x (4.3.6)
By
direct examination,
This is intermediate to the approximations
q{ and p
1
(x)
derived earlier. Usually
the least squares approximation
is
a fairly good uniform approximation, superior
to the Taylor series approximations.
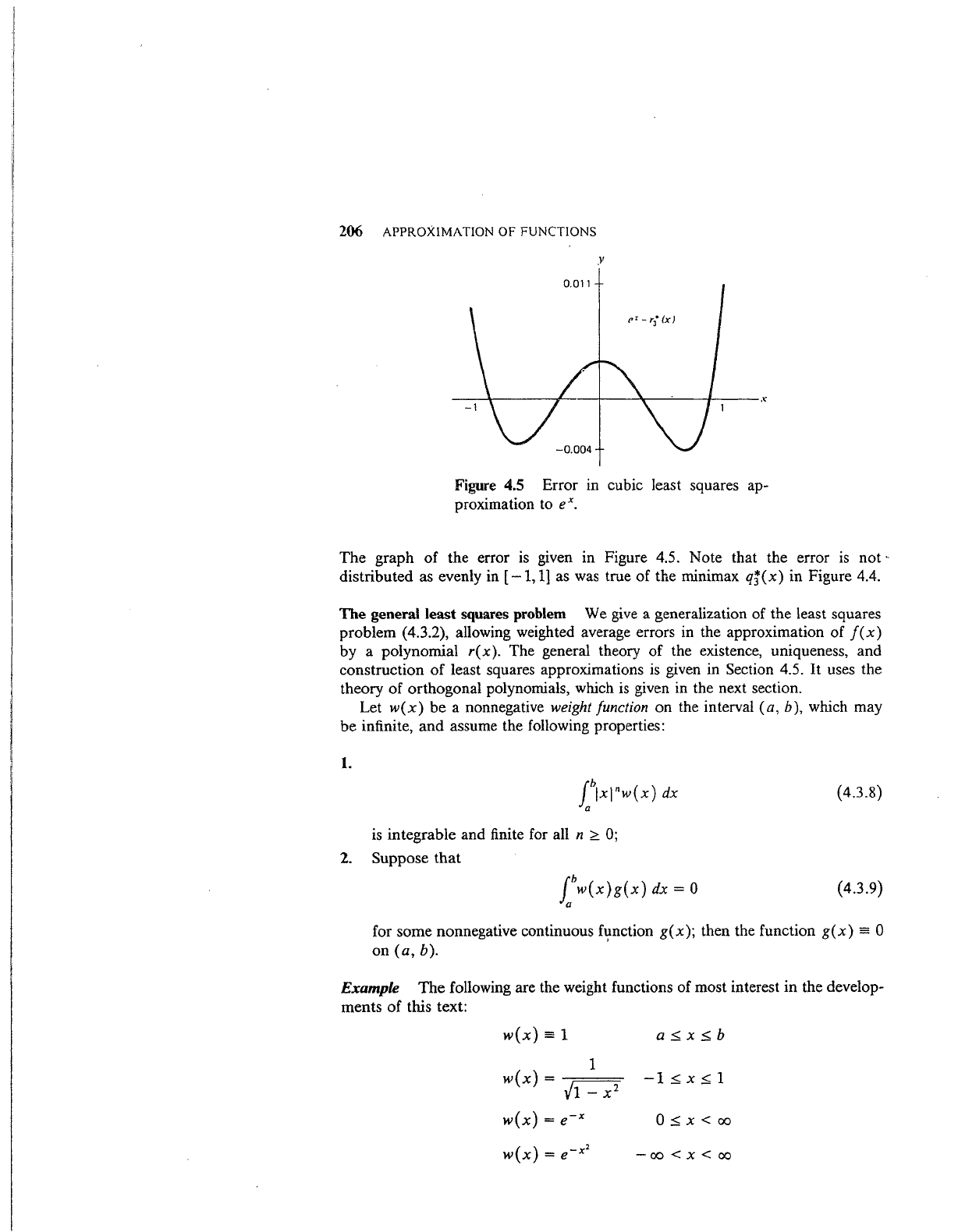
As a further example, the cubic least squares approximation to
ex
on [
-1,
1]
is given by
rt(x)
= .996294 + .997955x + .536722x
1
+ .176139x
3
(4.3.7)
and
206
APPROXIMATION
OF
FUNCTIONS
y
0.011
Figure 4.5 Error m cubic least squares ap-
proximation to ex.
The
graph
of
the error is given in Figure 4.5. Note that the error
is
not·
distributed as evenly in [
-1,
1]
as was true
of
the minimax
qj(x)
in Figure 4.4.
The
general least squares problem We give a generalization of the least squares
problem (4.3.2), allowing weighted average errors in the approximation
of
f(x)
by a polynomial
r(
x
).
The general theory
of
the existence, uniqueness,
and
construction
of
least squares approximations
is
given in Section 4.5.
It
uses the
theory
of
orthogonal polynomials, which
is
given in the next section.
Let
w(x)
be
a nonnegative weight function
on
the interval
(a,
b), which may
be
infinite,
and
assume the following properties:
1.
(4.3.8)
is integrable and finite for all n
~
0;
2. Suppose
that
fw{x)g{x)
dx = 0
a
(4.3.9)
for some nonnegative continuous function
g(x);
then the function
g(x)
= 0
on
(a,
b). '
Example
The
following are the weight functions of most interest in the develop-
ments
of
this text:
w(x} = 1
1
w(x}
=
_/
v1-
x
2
w(x}
=e-x
O:s;x<oo
-oo<x<oo
ORTHOGONAL POLYNOMIALS 201
For a finite interval [a, b
],
the general least squares problem can
now
be
stated.
Gicen f E C[a,
b],
does there exist a polynomial
r~(x)
of
degree
.:::;;
n that
minimizes
fw(x)[j(x)-
r(x)]
2
dx
a
(4.3.10)
among
all polynomials r(x)
of
degree.:::;;
n?
The function w(x) allows different
degrees of importance to
be
given to the error
at
different points in the interval
[a, b
].
This will prove useful
in
developing near minimax approximations.
Define
(4.3.11)
in order to compute (4.3.10) for an arbitrary polynomial
r(x)
of degree
.:::;;
n.
We
want to minimize F
as
the coefficients (a;} range over
all
real numbers. A
.necessary condition for a point
(a
0
,
•.•
, an)
to
be a minimizing point
is
BF
-=0
Ba;
i = 0, 1,
...
, n
(4.3.12)
By
differentiating through
the
integral
in
(4.3.11) and using (4.3.12),
we
obtain
the linear system
i = 0, 1,
...
, n (4.3.13)
To
see why this solution of the least squares problem
is
unsatisfactory,
consider the special case w(x)
=
1,
[a, b] =
[0,
1].
Then
the
linear system be-
comes
n
a·
i'
L
..
1
.=
Lf(x)x;dx
j-0
l + J +
·1
0
i=0,1,
...
,n
(4.3.14)
The matrix of coefficients
is
the · Hilbert matrix of order n +
1,
which was
introduced in (1.6.9). The solution of linear system
(4.3.14)
is
extremely sensitive
to small changes
in
the
coefficients or right-hand constants. Thus this
is
not a
good way to approach the least squares problem. In single precision arithmetic
on
an IBM 3033 computer, the cases n
~
4
will
be completely unsatisfactory.
4.4 Orthogonal Polynomials
As
is
evident from graphs of
xn
on
[0,
1],
n
~
0,
these monomials are very nearly
linearly dependent, looking much alike, and this results in the instability
of
the
linear system
(4.3.14). To avoid this problem,
we
consider an alternative basis for