Астапов В.Н. Лекции по ТСА
Подождите немного. Документ загружается.

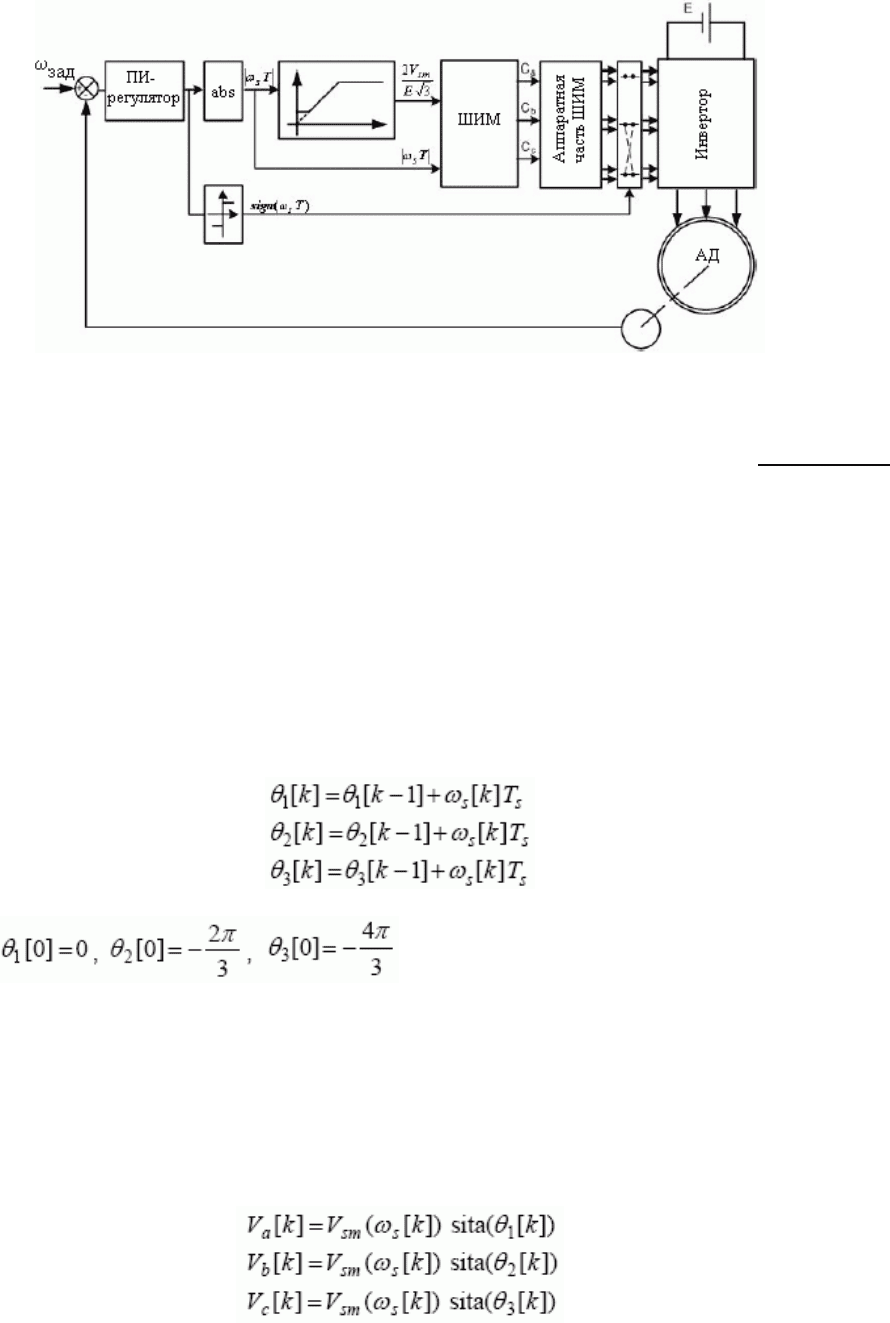
Рис. 3 - Блок-схема системы автоматического управления скоростью по принципу V/f
Лекция 16
1.2.3 Принцип обычной широтно-импульсной модуляции
Одним из способов решения задачи формирования с помощью инвертора
трехфазной синусоидальной системы напряжений со сдвигом по фазе 120
градусов на обмотках статора является использование таблицы синусов. В этом
случае частота статора s определяет три дискретных времени интеграторов,
которые вычисляют мгновенные значения фаз для каждого статорного
напряжения:
где , а Ts - период дискретизации для
алгоритма управления.
Если одно из этих значений становится больше 2 , то для поддержания
области значений в диапазоне от 0 до 2 из результирующего значения
вычитается 2. Таблица синусов используется для вычисления трех напряжений,
которые необходимо приложить к статору:
где Vsm(s) - амплитуда напряжения статора, определенная по принципу
постоянства отношения напряжение-частота и sita() = sin().
61
Достичь улучшения можно путем добавления к чистой синусоиде в таблице
синусов третьей гармоники sita() = sin()+1/6sin(3), т.к. она не оказывает
влияние на поведение электродвигателя и позволяет генерировать сигнал, первая
гармоника которого имеет амплитуду на 15.47% выше (2/3) по сравнению
максимумом сигнала (см. рисунок 4).
С учетом данного улучшения имеется возможность генерировать более
высокое переменное напряжение
Рис.4. Использование несинусоидальной формы напряжения для увеличения отношения
между амплитудой первой гармоники максимальным значением.
при питании от той же самой шины постоянного напряжения. Таким образом,
имеется возможность увеличения частоты вращения электродвигателя при
сохранении постоянства отношения V/F.
Данные значения сравнивают с выходом реверсивного счетчика (используется
в качестве генератора треугольных импульсов). Когда выходное значение
реверсивного счетчика перешагивает через данные значения, переключается
соответствующий выход компаратора. Как результат, в каждом ШИМ-канале
генерируются импульсы, коэффициент заполнения которых пропорционален
соответствующему значению напряжения статора. Поскольку данный
реверсивный счетчик с тремя компараторами достаточно сложен для
программной реализации, то такое устройство должно присутствовать в
микроконтроллере в качестве встроенного аппаратного блока. Это и послужило
причиной выбора микроконтроллера AT90PWM3, в состав которого входят три
контроллера силового каскада (PSC). Если рассмотреть в качестве примера
первую фазу, коэффициент заполнения импульсов, задаваемый содержимым
регистра сравнения соответствующего PSC, будет пропорционален
,
где ,
62
а Vs max и -- наибольшее значение амплитуды напряжения статора и
длительность паузы неперекрытия силовых ключей, соответственно.
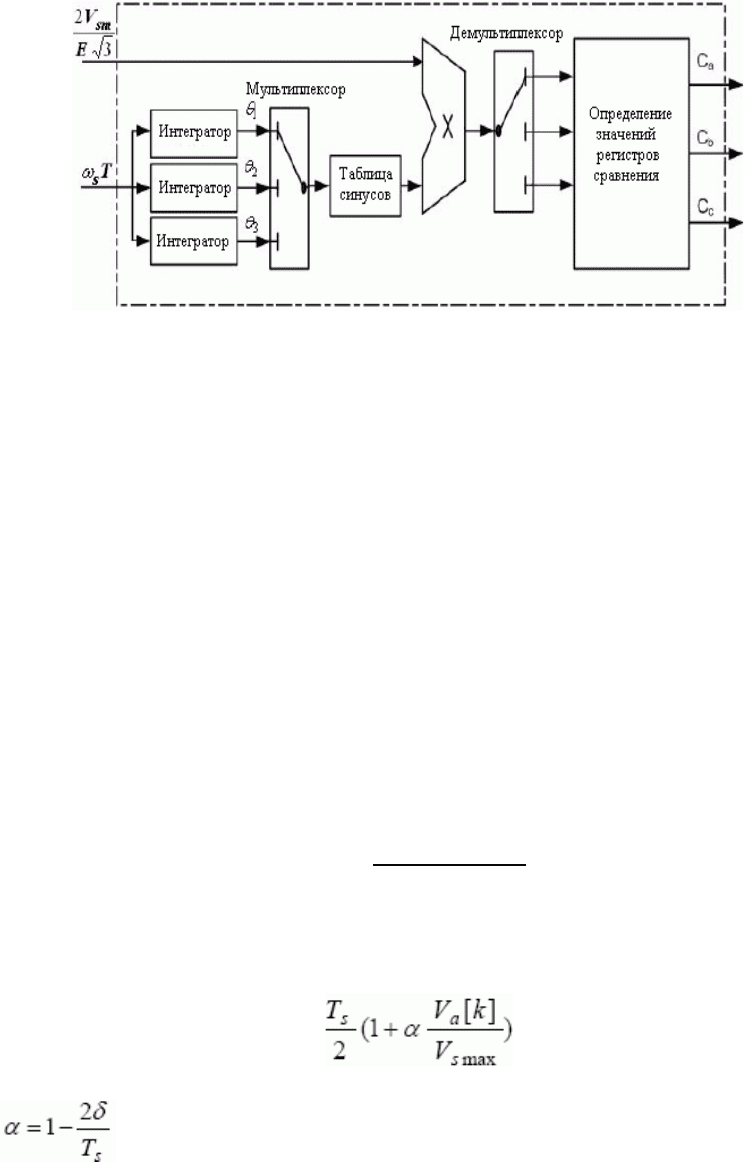
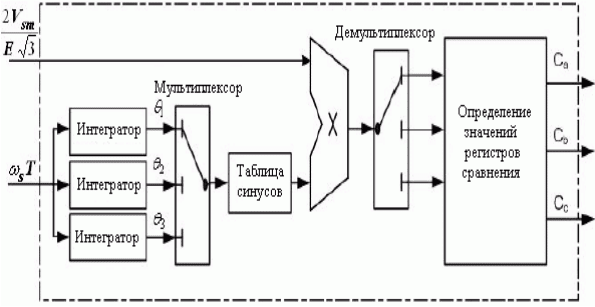
Результирующая блок-схема показана на рисунке5.
Рис. 5. Блок-схема обычного ШИМ-управления.
1.2.4 Таблицы преобразования со значениями синусов
Как показано в предыдущем разделе обычное ШИМ-управление
подразумевает использование таблицы синусов для вычисления sin() для всех
значений от 0 до 2 . Используя некоторые свойства тригонометрических
функций, имеется возможность сократить размер таблицы преобразования.
Наиболее эффективным способом является использование таблицы
преобразования со значениями синусов в диапазоне только от 0 до /3, т.к.
sin()=sin( - /3)+ sin(2 /3- ) для между /3 и 2/3;
sin()=sin( - ) для между 2/3 и ;
sin()=-sin( - ) для между и 4/3;
sin()=-sin( -4/3)+ sin(5/3- ) для между 4/3 и 5/3;
sin()=-sin(2 - ) для между 5/3 и 2 ;
Однако данное решение не позволяет добавить третью гармонику к функции
синуса, необходимость чего обсуждалась в предыдущем разделе. Это является
причиной, почему необходимо использовать таблицу преобразования sita() со
значениями или sin() или sin()+1/6 sin() в диапазоне между 0 и /2, а
также использовать следующие соотношения для вычисления sita() между /2
и 2 :
sita()=sita( - ) для между /2 и ;
sita()=sita( - ) для между и 3 /2;
sita()=-sita(2 - ) для между 3 /2 и 2 .
Последнее решение позволяет достаточно легко обмениваться между двумя
возможными таблицами преобразования.
63
1.2.5. Принцип действия ПИ-регулятора
Алгоритм ПИ-регулятора может быть реализован без обращения к сложной
теории автоматического управления. Целью данного алгоритма является
определение управляющего сигнала объектом управления (в нашем случае это
частота статорного напряжения), при котором контролируемый выходной сигнал
объекта управления (в нашем случае это частота вращения ротора) достигнет
заданного значения (желаемая частота вращения, заданная пользователем). ПИ
это сокращение от "пропорциональный и интегральный". Эти два термина
описывают отдельные элементы регулятора:
← пропорциональная часть, которая выполняет умножение результирующего
сигнала рассогласования (разницы измеренного выходного сигнала объекта
управления и заданного значения) на постоянную величину, которая носит
название коэффициент передачи пропорциональной части. Пропорциональная
часть определяет краткосрочное поведение регулятора, т.к. она определяет, как
сильно нужно реагировать регулятору на изменение заданных значений;
← интегральная часть, которая добавляет долговременную точность
регулятору. Данная часть регулятора выполняет произведение суммы всех
предшествующих сигналов рассогласования на постоянную величину, которая
называется коэффициентом передачи интегрирующей части. Предшествующие
значения сигнала рассогласования для вычисления суммы хранятся в памяти и
обновляются пока значение рассогласования не равно нулю. Это позволяет
регулятору убрать различия между измеренным выходным значением и
заданным, но, при этом, снижается быстродействие и устойчивость замкнутой
системы.
Иногда, помимо пропорциональной и интегрирующей части, добавляется
третья- дифференцирующая. В этом случае регулятор называется ПИД
(пропорционально-интегрально-дифференцирующий). Применение такого
регулятора для управления асинхронным электродвигателем по принципу
постоянства V/f нецелесообразно. Его применение позволяет повысить
быстродействие контура регулирования, но при этом также пропускаются шумы
и снижается стабильность замкнутого контура. Кроме того, Д-компонент сложен
в настройке.
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ПРИВОД С ШИМ-ПРЕОБРАЗОВАТЕЛЕМ
64
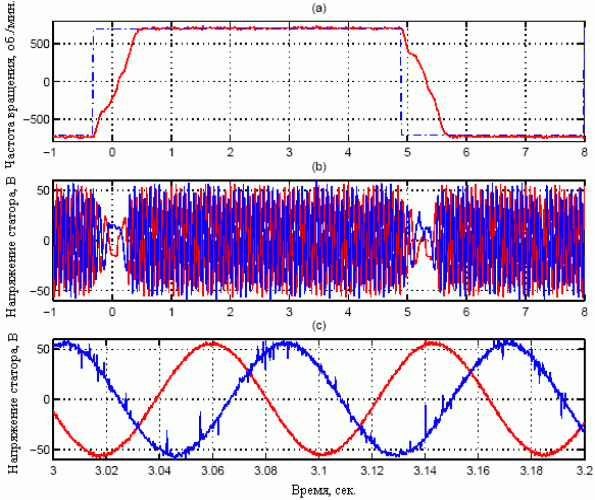
На рисунках 6 и 7 приведены переходные процессы для частоты вращения и
статорных напряжений, полученных под управлением микроконтроллера при
скачкообразном изменении заданных скоростей вращения между +700 и -700
оборотов в минуту. Данные результаты получены при управлении асинхронным
электродвигателем мощностью 750 Вт (с нагрузкой не более 370Вт).
Рисунок 6. Экспериментальные результаты, полученные с помощью таблицы преобразования
идеальной синусоиды
Данными рисунками демонстрируется, что желаемая скорость достигается по
завершении 1 секундного переходного процесса и что при достижении частотой
статора на выходе ПИ-регулятора значения близкого к нулю амплитуда
напряжения статора становится равной пороговому напряжению ("boost
voltage").
Данные рисунки также подтверждают, что одни и те же значения скоростей
вращения и вращающих моментов.
65
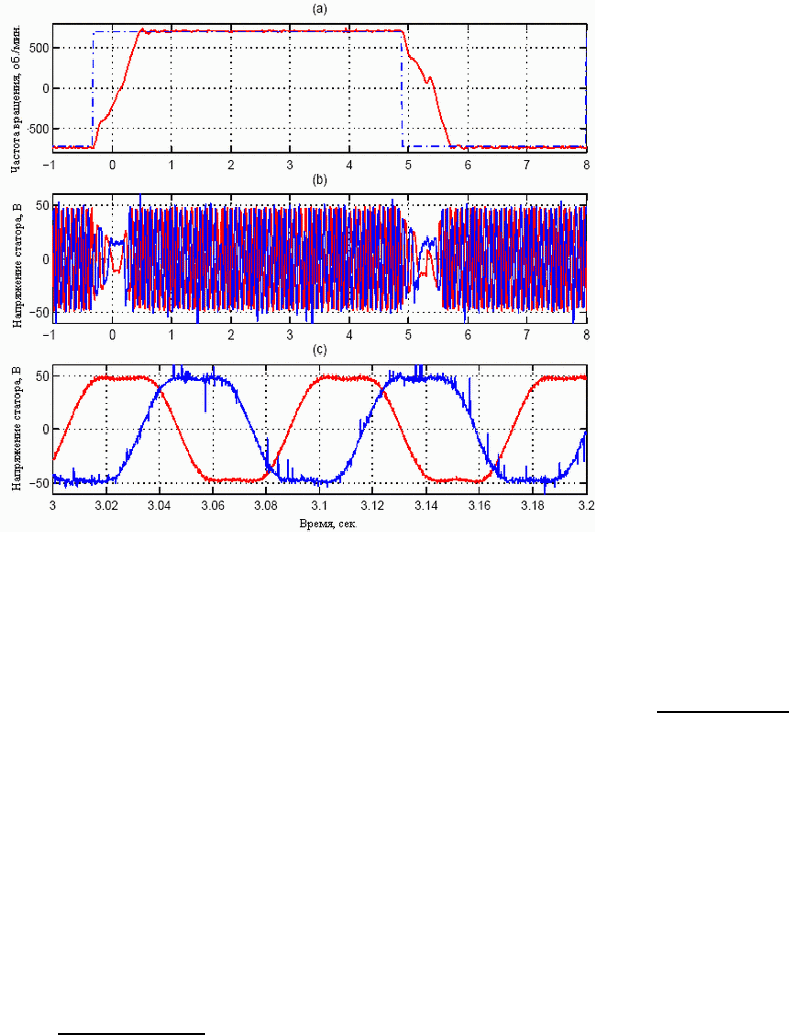
Рисунок 7. Экспериментальные результаты, полученные с помощью таблицы преобразования,
включающей третью гармонику.
Лекция 17
УПРАВЛЕНИЕ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
ПЕРЕМЕННОГО ТОКА ПО ПРИНЦИПУ ПОСТОЯНСТВА V/f И
ВЕКТОРНОГО ШИМ-УПРАВЛЕНИЯ
1.1ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ.
В предыдущей лекции рассматривалась реализация устройства управления
асинхронным электродвигателем с обратной связью по скорости на основе
микроконтроллера AT90PWM3 с использованием принципа постоянства
отношения напряжение-частота (правило Костенко) и обычной широтно-
импульсной модуляции (ШИМ). Использование метода векторного ШИМ-
управления вместо обычного ШИМ-управления позволяет более экономично
расходовать энергию и улучшить переходные процессы.
Алгоритмы управления реализованы на микроконтроллере AT90PWM3,
представляющий собой недорогой и экономичный однокристальный
микроконтроллер, достигающий производительности до 16 миллионов
инструкций в секунду. Он предназначен для выполнения функций управления в
понижающих/повышающих преобразователях постоянного напряжения,
синхронными электрическими машинами на основе постоянных магнитов,
трехфазными асинхронными электродвигателями и бесколлекторными
электродвигателями постоянного тока. Микроконтроллер содержит:
66
Микроконтроллер на основе 8-разрядного ядра AVR с прогрессивной
архитектурой RISC (ядро похоже на ATmega 88)
8 кбайт внутрисистемно-программируемой флэш-памяти
512 байт статического ОЗУ для хранения переменных и таблиц
соответствия, используемых прикладной программой
512 байт ЭСППЗУ для хранения конфигурационных данных и таблиц
соответствия
Один 8-разрядный таймер и один 16-разрядный таймер
6 ШИМ-каналов, оптимизированные под полумостовую топологию
силовой схемы управления
11-канальный 10-разрядный АЦП и 10-разрядный ЦАП
3 встроенных компаратора
Программируемый сторожевой таймер со встроенным генератором
1.2. Принцип действия
1.2.1 Принцип пространственно-векторной модуляции
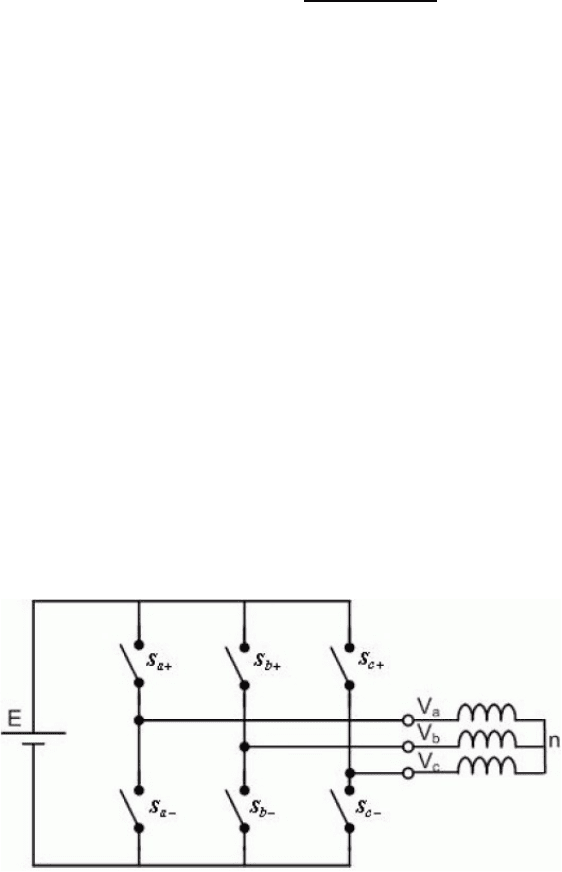
На рисунке 1 показана типичная структура трехфазного асинхронного
электродвигателя, подключенного к инвертору напряжения.
Рис.1 Типичная структура инверторного асинхронного привода
Поскольку электродвигатель рассматривается как равномерная нагрузка с
изолированной нейтралью, то V
n
=(V
a
+V
b
+V
c
)/3, V
an
=V
a
-V
n
=(V
ab
-V
ca
)/3, V
bn
=V
b
-
V
n
=(V
bc
-V
ab
)/3, а V
cn
=V
c
-V
n
=(V
ca
-V
bc
)/3. Поскольку верхние силовые ключи могут
находиться только во включенном или отключенном состоянии и, при этом,
соответствующие нижние ключи могут находиться только в противоположном
состоянии (паузами неперекрытия в данном случае пренебрегаем), то всего
возможно восемь состояний силовой схемы управления, как показано на рисунке
2. Шесть из них приводят к формированию ненулевых фазных напряжений, а два
смениваемых состояния приводят к формированию нулевых фазных
напряжений. Если применить преобразование Concordia [1,2], то шесть
ненулевых фазных напряжений будут представлять вершины шестиугольника
(см. рисунок 3).
67
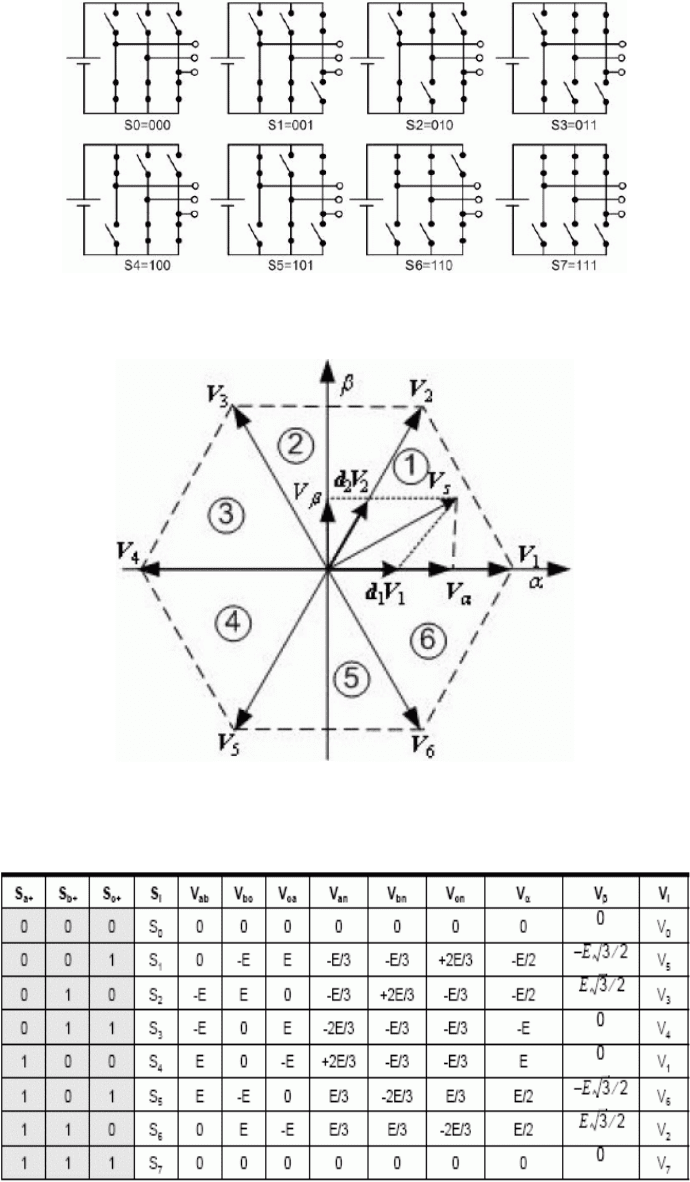
Как показано на рисунке 3, угол между ненулевыми напряжениями всегда
равен 60 градусов. В комплексной форме данные ненулевые фазные напряжения
могут быть записаны в виде V
k
=E
e
j(k-1)n/3
, где k = 1..6 и V0= V7=0В. В таблице 1
представлены линейные и фазные напряжения для каждой из 8 возможных
конфигураций инвертора.
Рисунок 2
Рис. 3. Представление восьми возможных конфигураций инвертора в системе координат
Concordia
Таблица 1. Состояния ключей инвертора и его выходные напряжения
68
В системе координат Concordia любое статорное напряжение Vs=V +j·V
= Vsm cos()+j·Vsm sin() попадает вовнутрь одного из секторов
шестиугольника и может быть выражено как линейное сочетание двух
ненулевых фазных напряжений, которые определяют границы данного сектора:
V
s
=d
k
· V
k
+d
k+1
·V
k+1
.
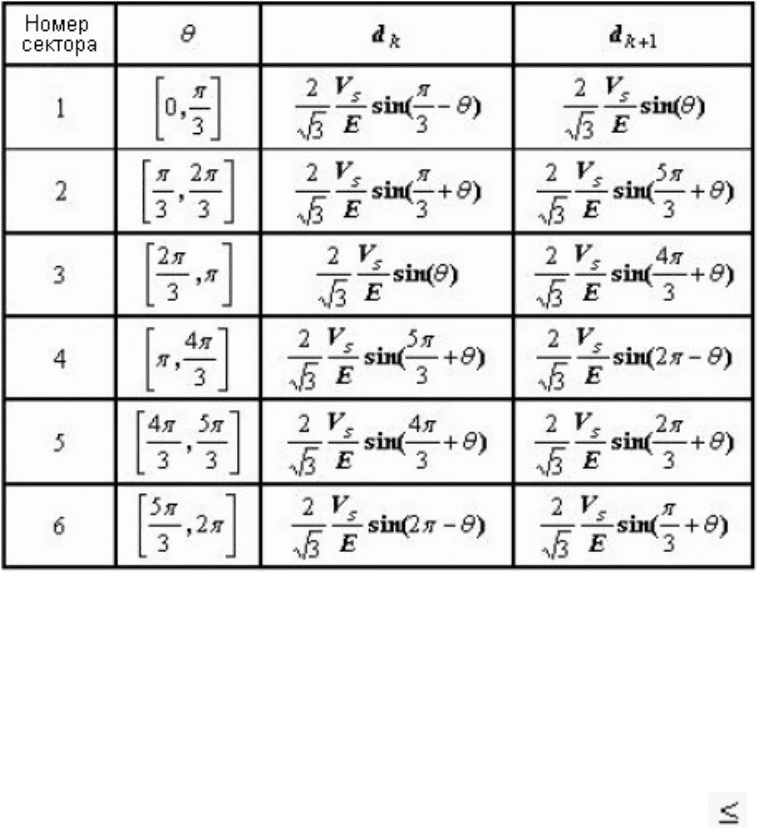
Таблица 2. Выражения коэффициентов заполнения импульсов для каждого сектора
Приравнивая d
k
·V
k
+d
k+1
·V
k+1
к V
sm
cos()+j·Vsm sin() получаем выражения
коэффициентов заполнения импульсов для каждого сектора, которые
представлены в таблице 2. Поскольку инвертор не может мгновенно
генерировать напряжение V
s
, то принцип векторного ШИМ-управления
заключается в генерации напряжения с периодичностью T
s
, среднее значение
которого равно V
s
, что достигается путем генерации напряжения V
k
в течение
T
k
= d
k
·T
s
и V
k+1
в течение T
k+1
= d
k+1
·T
s
. Поскольку d
k
+ d
k+1
1 данные
напряжения должны завершиться в течение периода коммутации T
s
напряжением V
0
и/или V
7
. Возможно несколько вариантов решений [3,4], у
которых минимизация общих гармонических искажений статорного тока
выполняется за счет приложения напряжений V
0
и V
7
одинаковой длительности
T
0
= T
7
= (1 - d
k
- d
k+1
)T
s
/2. Напряжение V
0
эквивалентно приложенному
напряжению в начале и в конце периода коммутации, а V
7
- прикладывается по
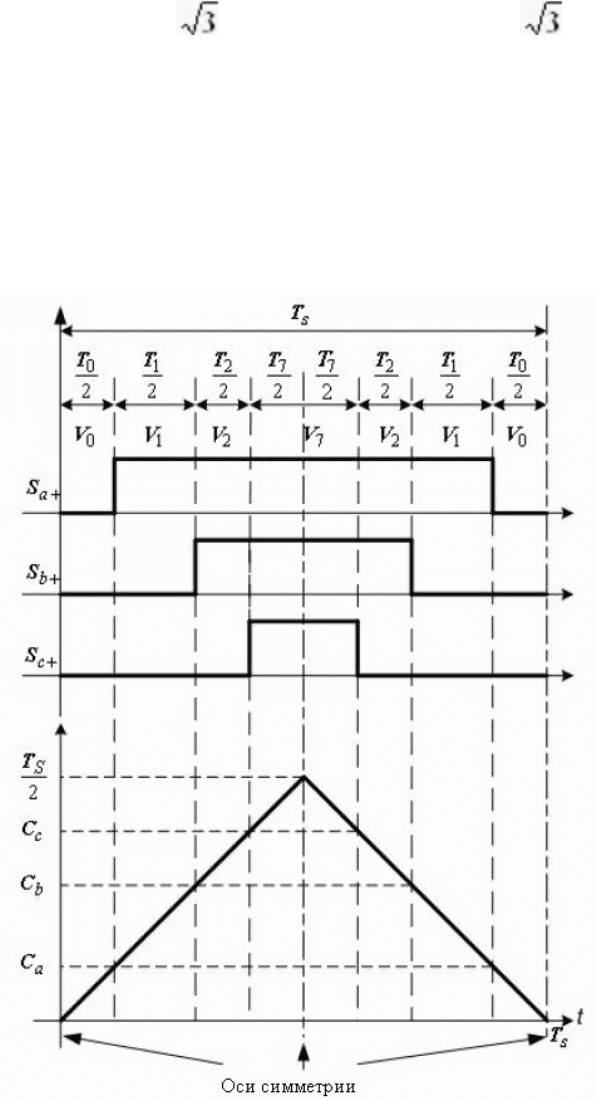
середине периода коммутации. В верхней части рисунка 4 приведены
осциллограммы для сектора 1.
1. 2.2 Эффективность реализации векторного ШИМ-управления
69
В таблице 2 показано, что выражения для коэффициентов заполнения
импульсов имеют различный вид в каждом секторе. При внимательном изучении
данных выражений можно прийти к выводу, что, т.к. sin(x) = sin(-x), то все
коэффициенты заполнения импульсов могут быть записаны унифицированным
способом: d
k
=2·V
sm
·sin(")/E· и d
k+1
=2· V
sm
· sin(')/E· , где "=/3-' , а
'=-(k-1)/3. Поскольку данные выражения не зависят от номера сектора, то их
можно обозначить d
a
и d
b
. Поскольку область значений ' всегда находится в
пределах 0…/3, то при вычислении d
a
и d
b
необходима таблица синусов только
для указанного интервала. Это существенно снижает объем памяти, требуемый
для хранения таблицы синусов. AT90PWM3 содержит 3 контроллера силового
каскада (PSC) для генерации импульсных сигналов, сформированных
алгоритмом векторного управления.
Рис. 4. Осциллограммы сигналов управления инвертором.
Счетчики выполняют счет от нуля то значения, соответствующего половине
периода коммутации (как показано в нижней части осциллограмм сигналов
управления инвертором и соответствующие значения регистров сравнения на
70