Allman E.S., Rhodes J.A. Mathematical Models in Biology: An Introduction
Подождите немного. Документ загружается.

26 Dynamic Modeling with Difference Equations
1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
"r" value
Attracting Population Cycle
next_p = p+r*p*(1- p)
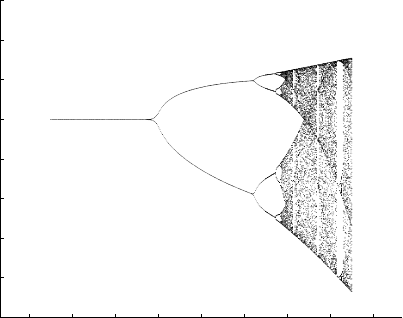
Figure 1.6. Bifurcation diagram for the logistic model.
next set of iterations, we plot points that bounce back and forth between the
two values in the cycle, so that it appears that we have just plotted two points.
From this diagram, we notice several things. First the interval of r values
over which we get a 2
n+1
-cycle is shorter than that for a 2
n
-cycle. Thus, once
r is large, small additional increases can have more drastic effects.
Second, if r is increased past a certain point (≈2.692 ...), all the bifur-
cations into 2
n
-cycles have already taken place and a new type of behavior
emerges. It appears as if the model values are changing more or less at ran-
dom. However, the behavior is certainly not random – there is a completely
deterministic formula producing it. The technical terminology for what has
happened is that the model’s behavior has become chaotic. The choice of the
word “chaos” to describe this is perhaps unfortunate, since it calls up images
of randomness and primordial confusion that are really irrelevant.
Chaos actually has a rather precise technical definition that we will not
give. Instead, we merely informally point out two of the requirements mathe-
maticians impose on the use of the word: 1) the model must be deterministic –
that is, there can be no randomness in it; and 2) the predictions of the model
are extremely sensitive to initial conditions.
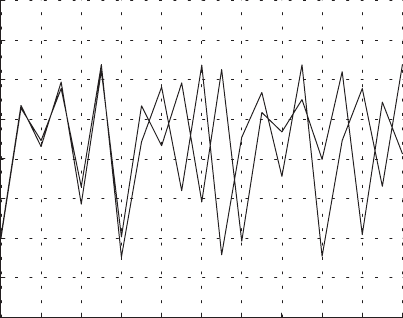
To see that the discrete logistic model is in fact chaotic for r = 2.75, for
example, we need to look into condition (2) a bit more. The plot in Figure
1.7 shows population values arising from two different, but very close, values
of P
0
.
1.3. Analyzing Nonlinear Models 27
02468101214161820
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time
Population p
next_p = p+2.75*p*(1-p)
Figure 1.7 Populations resulting from two nearby initial values; logistic model r = 2.75.
Note that although the populations change similarly for the first few time
steps, after a while they seem to be changing in completely different ways. For
these initial values, then, we seem to have observed an extreme sensitivity of
the model to the initial conditions. Of course, this is no proof of anything and
it’s conceivable that this behavior was just an artifact of computer round-off
errors. It has been proven, however, that this is genuine chaos.
The possibility of chaotic behavior in as simple a population model as the
discrete logistic one created quite a stir in the 1970s when it was first publi-
cized by May (May, 1978). If such a simple model could produce such com-
plicated behavior, then the natural view that complicated population dynamics
can arise only from complicated interactions and environmental fluctuations
would have to be abandoned.
Further work by May and others on determining appropriate values for
parameters such as r in models of both laboratory and real-world insect pop-
ulations led them to doubt that chaotic behavior was actually seen in real
population dynamics. However, one examination of measles epidemics in
New York City did suggest the possibility of chaos. Mumps and chickenpox,
however, did not seem to behave chaotically. Although work is still being
done, there is little data of high enough quality and long enough duration to
really test the idea. More recent focus has been on population models more
complex than the logistic one. In fact, in 1996, Cushing et al. announced the
first unequivocal discovery of a real population, a laboratory population of
28 Dynamic Modeling with Difference Equations
the flour beetle tribolium, that exhibits chaotic dynamics (see (Cushing et al.,
2001)).
Problems
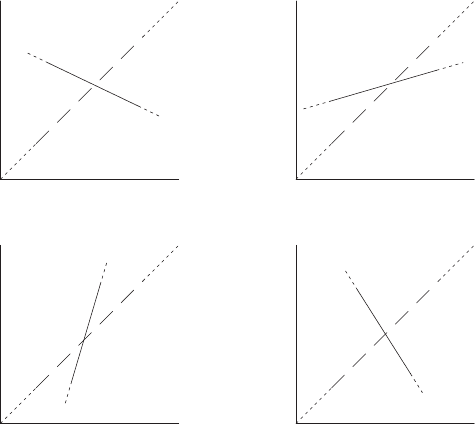
1.3.1. The equilibrium points of a model are located where the graph of P
t+1
as a function of P
t
crosses the line P
t+1
= P
t
. Suppose we focus on a
section of the graph around an equilibrium point and zoom in so that
the graph of P
t+1
as a function of P
t
appears to be a straight line. In
each of the models of Figure 1.8, decide whether the equilibrium is
stable or unstable by choosing a P
0
close to the steady state and then
cobwebbing.
1.3.2. Reasoning from the preceding problem, in what range must the slope
of the graph of P
t+1
vs. P
t
be at an equilibrium point to produce
stability? Instability? (Hint: You might want to think about the special
cases where the slope is first −1 and then 1.)
1.3.3. (Calculus) Phrase your answer to the preceding problem by using
derivatives: If P
∗
is an equilibrium point of the model P
t+1
= f (P
t
),
then it is stable if ... .
P
t+1
P
t
P
t+1
P
t
P
t+1
P
t
P
t+1
P
t
a. b.
c. d.
Figure 1.8. Cobweb graphs for problem 1.3.1.
1.3. Analyzing Nonlinear Models 29
1.3.4. Mathematically, when dealing with the logistic growth model N =
rN(1 − N/K ), we can always choose the units in which N is mea-
sured so that K = 1. Thus, we need only consider N = rN(1 − N ),
which has only one parameter, r , rather than two. Carefully investi-
gate the long-term behavior of this model for various values of r
starting at .5 and gradually increasing, by using the MATLAB pro-
gram onepop. For what values of r do you see a simple approach
to equilibrium without oscillations? An approach to equilibrium with
oscillations? 2-cycle behavior? 4-cycle behavior?
1.3.5. In the preceding exercise, you discovered that as r is increased past
2, the population will stop tending to K = 1 and instead fall into a
2-cycle.
a. Show that, regardless of the fact that the model falls into a 2-cycle,
the only equilibrium points are still N
∗
= 0 and 1.
b. If N
t
falls into a 2-cycle, then N
t+2
≈ N
t
. Therefore, it may be
worthwhile to find a formula for N
t+2
in terms of N
t
. Do it for K =
1, r = 2.2. Your answer should be a fourth-degree polynomial.
c. Can you use your work in part (b) to find formulas for the points
in the 2-cycle by setting N
t+2
= N
t
? Try it. Things may not work
out nicely, but at least explain the difficulty.
1.3.6. For each of the following, determine the equilibrium points.
a. P
t+1
= 1.3P
t
− .02P
2
t
b. P
t+1
= 3.2P
t
− .05P
2
t
c. P = .2P(1 − P/20)
d. P = aP − bP
2
e. P
t+1
= cP
t
− dP
2
t
.
1.3.7. For (a–e) of the preceding problem, algebraically linearize the model
first about the steady state 0 and then about the other steady state to
determine their stability.
1.3.8. Compute the equilibrium points of the model P
t+1
= P
t
+rP
t
(1 −
P
t
). Then use only algebra to linearize at each of these points to
determine when they are stable or unstable.
1.3.9. (Calculus) Redo the preceding problem, but use derivatives to deter-
mine the stability of the equilibria of P
t+1
= P
t
+rP
t
(1 − P
t
). You
should, of course, get the same answers.
1.3.10. (Calculus) Here is a slightly different approach to the relationship
between derivatives and stability: Find the tangent line approxima-
tions to f (P) = P + rP(1 − P) at the equilibria P
∗
= 0 and 1. Then
30 Dynamic Modeling with Difference Equations
replace P +rP(1 − P) by these approximations in P
t+1
= P
t
+
rP
t
(1 − P
t
). Use this to determine the stability of the equilibria. Your
answer should agree with the preceding two problems.
1.3.11. Many biological processes involve diffusion. A simple example is
the passage of oxygen from the lung into the bloodstream (and the
passage of carbon dioxide in the opposite direction). A simple model
views the lung as a single compartment with oxygen concentration
L and the bloodstream as an adjoining compartment with oxygen
concentration B. If, for simplicity, we assume the compartments both
have volume 1, then in the time span of a single breath the total oxygen
K = L + B is constant. If we think of a very small fixed-time interval,
then the increase in B over this time interval will be proportional to
the difference between L and B. That is,
B = r(L − B).
(This experimental fact is sometimes called Fick’s law.)
a. In what range must the parameter r be for this model to be mean-
ingful?
b. Use the fact that L + B = K to write the model using only two
parameters, r and K , to describe B in terms of B.
c. For r = .1, K = 1, and a variety of choices of B
0
, investigate the
model using the MATLAB program onepop. How do things
change if a different value of r is used?
d. Algebraically, find the equilibrium point B
∗
(in terms of r and K )
for this model. Does this fit with what you saw in part (c)? Can
you explain the result intuitively?
e. Let b = B − B
∗
, and rewrite the model in terms of b, the
offset from equilibrium, by substituting in B = B
∗
+ b and
simplifying.
f. Use part (e) to find a formula for b
t
and then one for B
t
. Make sure
your formula gives the same results as onepop.
g. Can you modify the model to deal with two compartments of un-
equal size?
Projects
1. Suppose we know that, when undisturbed by humans, a commercially
valuable population (e.g., a particular species of fish) has dynamics
1.3. Analyzing Nonlinear Models 31
modeled well by the discrete logistic difference equation
P = rP(1 − P/K ).
Of course, the dynamics of the population will depend on the value of r ,
but by choosing appropriate units, we may assume K = 1.
Investigate the effect of regular harvesting of the population under two
different types of assumptions.
a. P = rP(1 − P/K ) − H, where H is some fixed number of indi-
viduals harvested at each time step.
b. P = rP(1 − P/K ) − hP, where h is some fixed percentage of the
population harvested at each time step (so, 0 ≤ h ≤ 1).
Suggestions
r
To get a feel for the models, investigate them numerically with onepop
for lots of reasonable choices of the parameters. Make a note of any
unusual behavior and try to explain it.
r
Calculate analytically the equilibria (which may be in terms of r and
H or h) and the stability of these equilibria (which may also depend
on r and H or h).
r
Explain the equilibria and stability in terms of cobweb diagrams. What
effect does subtracting the harvesting terms H and hP have on the
cobweb diagram of the logistic model?
r
Try to find the largest H or h can be so that there is still a stable
equilibrium. If h or H is chosen to be as large as possible so that there
is still a stable equilibrium (which might be economically desirable),
what happens to the unstable equilibrium?
r
If you were responsible for managing the population, would you be
comfortable if the stable equilibrium was close to the unstable one?
r
Are there values of r for which H can be larger than K ? Does this
make sense biologically?
r
If, in the absence of harvesting, a population has no stable equilib-
rium, can imposing harvesting lead to stability? Does this make sense
biologically?
r
Use the program longterm to create diagrams showing changes in
long-term behavior as the parameters of the model are varied.
2. For an insect with a generation time significantly shorter than 1 year,
it may be inappropriate to think of the carrying capacity as a constant.
Investigate what happens if the carrying capacity varies sinusoidally. To
32 Dynamic Modeling with Difference Equations
get started, try the MATLAB commands:
t=[0:50]
K=5+sin((2*pi/12)*t)
p=.1; pops=p
for i=1:50 p=p+.2*p*(1-p/K(i)); pops=[pops p]; end
plot(t,K,t,pops)
Suggestions
r
Explain why a sinusoidally varying carrying capacity might be biolog-
ically reasonable under some circumstances.
r
Investigate this situation for a variety of choices of r and P
0
. Does P
t
oscillate with K ? Pay particular attention to when the population peaks
and what the average population is in the long run. Do the results fit
your biological intuition?
r
What happens if the frequency of oscillation of the carrying capacity
is changed? (Try replacing the “2*pi/12” in the previous command
with “2*pi/N ” for different N.)
r
As r increases, does this model exhibit bifurcations? Chaos?
3. Investigate what happens if the carrying capacity varies randomly in a
logistic model, and, in particular, the effect of such a carrying capacity on
small populations. You will need to know that the MATLAB command
rand(1) produces a random number between 0 and 1 with a uniform
distribution, and that randn(1) produces a random number from a
normal distribution with mean 0 and standard deviation 1. You might
begin with using onepop with an expression like 10+rand(1) as the
carrying capacity in the logistic model.
Suggestions
r
Perhaps 10*rand(1) or 10+2*randn(1) would be a better form
for the carrying capacity. Describe the qualitative differences between
the biological situations these different expressions might describe.
r
For your chosen carrying capacity expression, investigate the behavior
of the model for a variety of choices of r and P
0
. How does P
t
behave?
What is the average population in the long run? Do the results fit your
biological intuition?
r
As r increases, does this model exhibit bifurcations? Chaos?
r
Investigate what happens if we have a small population, that must, of
course, be integer valued. You will need to know that the MATLAB
command floor(p) returns the largest integer less than or equal to
1.4. Variations on the Logistic Model 33
p. Your model should be something like
P
t+1
= floor(P
t
+rP
t
(1 − P
t
/K )),
where K is first a constant and then is made to vary randomly.
1.4. Variations on the Logistic Model
In presenting the discrete logistic model in previous sections, we have tried
to keep the model as simple as possible to focus on developing the main
ideas. Now that the concepts of equilibria and stability and the technique of
cobwebbing have been developed, we can pay more attention to producing a
more realistic model.
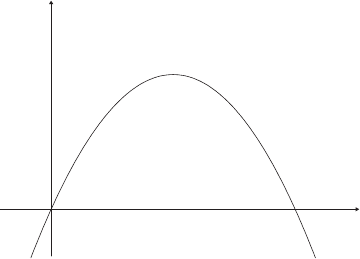
In looking at the graph of P
t+1
as a function of P
t
in Figure 1.9, for the
model P
t+1
= P
t
(1 + r (1 − P
t
/K )), one immediately obvious feature that is
unrealistic is the fact that the parabola drops below the horizontal axis as we
move off to the right. This means that large populations P
t
become negative at
the next time step. Although we can interpret a negative population as extinct,
this may not be the behavior that would actually happen and that we would
like our model to describe.
Perhaps a more reasonable model would have large values of P
t
produce
very small (but still positive) values of P
t+1
. Thus, a population well over
the carrying capacity might immediately crash to very low levels, but at least
some of the population would survive. Graphically, P
t+1
should depend on
P
t
as shown in Figure 1.10.
A function producing such a graph is F(P) = Pe
r(1−P/K )
. The exponential
in this formula produces the exponential-like decay as we move horizontally
out on the graph, while the factor of P causes the initial rise in the graph near
the origin.
P
t
P
t+1
Figure 1.9. Model with unrealistic P
t+1
< 0 for large P
t
.

34 Dynamic Modeling with Difference Equations
P
t
P
t+1
Figure 1.10. New model with P
t+1
> 0.
The model P
t+1
= Pe
r(1−P
t
/K )
is sometimes called the discrete logistic
model and is sometimes referred to as the Ricker model, after its first user
(Ricker, 1954). As you can easily compute, the equilibria for this model
are P
∗
= 0 and P
∗
= K . You can analyze this model by drawing cobweb
diagrams and computing the stability of the equilibria, just as in the last
sections.
You might object to this rabbit-out-of-the-hat approach to modeling; we
have not quite explained where the equation for the Ricker model came from.
Although we will give one explanation shortly, it is important to realize that
what really matters about the formula is that it produces the qualitative graph-
ical features we think are realistic. If a strange formula gives us the kind of
graph we think we need, that is enough justification for using it.
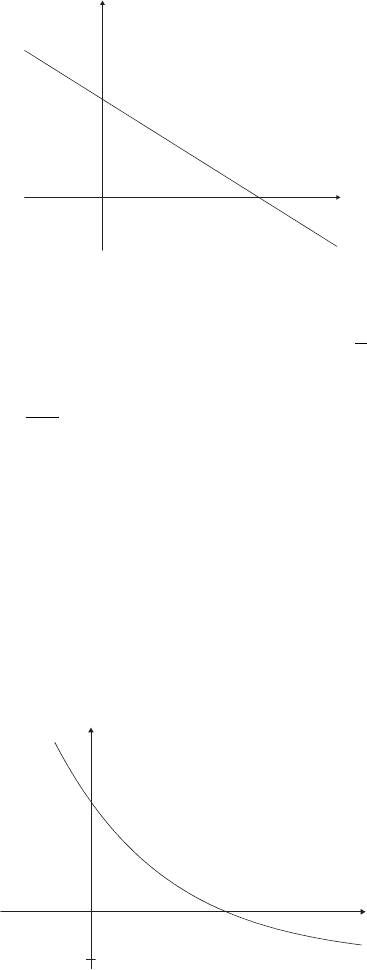
To motivate more fully the Ricker model, let’s return to the graph of the
per-capita population change P/P as a function of P that first motivated our
development of the logistic model. Our sole reason for choosing the formula
P/P = r(1 − P/K ) was to produce the downward trend shown in Figure
1.11.
How can we improve this? First, it is impossible for the per-capita popula-
tion change to be less than −1, because that would mean more than one death
per capita. That means our graph should really look more like Figure 1.12.
Since this looks like an exponential decay curve moved down 1 unit, that
leads us to a formula such as:
P
P
= ae
−bP
− 1
for some positive values of a and b. To get the traditional form of the Ricker
1.4. Variations on the Logistic Model 35
K
r
P
P/P
∆
Figure 1.11. Per-capita growth rate for the logistic model.
model, we make some variable substitutions. Letting b =
r
K
and a = e
r
,in
terms of the new parameters r and K , the model becomes
P
P
= e
r
e
−rP/K
− 1 = e
r(1−P/K )
− 1.
Now straightforward algebra leads to the Ricker formula
P
t+1
= P
t
e
r(1−P
t
/K )
.
In this formula, K should still be interpreted as the carrying capacity, because
if P > K , then P < 0; and if P < K , then P > 0. The finite intrinsic
rate of growth, however, is e
r
− 1 rather than just r, although for small r these
quantities are approximately the same.
Of course, the curve for P/P does not have to be an exponential decay
curve exactly. To model a population accurately, we would need to collect
K
r
-1
P
P/P
∆
Figure 1.12. Per-capita growth rate for a new model.