Алехина Л.Т., Большаков А.С., Боресков В.Г. и др. Технология мяса и мясопродуктов
Подождите немного. Документ загружается.

Гибкая автоматизированная система переработки скота
Гибкая автоматизированная система переработки скота
(ГАСПС) может существенно повлиять как на все технологиче-
ские процессы мясной технологии, в том числе и на систему реа-
лизации в оптовой и розничной торговле и на предприятиях об-
щественного питания, так и на выращивание сельскохозяйствен-
ных животных.
В основу создания ГАСПС положено определение законо-
мерностей строения тела животного, независимо от породы,
пола, условий откорма и т. д., и на этой базе определение доми-
нирующих внешних и внутренних контрольных точек или линей-
ных размеров животного, широкое применение ЭВМ и робото-
техники, использование существующих средств механизации и
автоматизации первичной переработки скота, которая на мясо-
перерабатывающих предприятиях является одной из трудоемких
операций.
Одной из ключевых составных частей комплекса исследова-
ний, направленных на решение задачи автоматизации работы
процесса переработки скота, является построение математиче-
ской модели животного.
Для выполнения автоматическим способом различных техно-
логических операций, таких, как оглушение, убой, снятие шкуры,
нутровка, разделка и других, требуется достаточно точная ин-
формация о геометрическом расположении различных органов
животного и определение ключевых точек.
Такую информацию практически невозможно получить с по-
мощью геометрических обмеров каждого животного в предубой-
ной стадии, так как, с одной стороны, это требует создания
сложнейших измерительных комплексов и значительных времен-
ных затрат на фактический обмер, а, с другой стороны, такие
геометрические обмеры будут являться лишь поверхностными и
не дадут информации о расположении внутренних ключевых то-
чек и внутренних органов животного.
В связи с этим предлагается следующая методика^выведения
инструмента в нужную точку на основании созданной абстракт-
ной математической модели топологии животного.
1. Получение резко ограниченного набора параметров о кон-
кретном животном, включающего в себя несколько (2—5) гео-
метрических параметров, возраст, массу, тип животного и др.
2. Введение этих параметров по возможности автоматиче-
ским способом в управляющую ЭВМ.
3. Обработка этих параметров машинной программой, реали-
зующей абстрактную математическую модель животных, и полу-
чение математической модели конкретного животного.
4. На основании полученной математической модели опреде-
ление требуемых для проведения технологических операций ко-
ординат расположения различных ключевых точек, линий и ор-
ганов животного с некоторой точностью.
19П
5. Использование различных работотехнических систем, вы-
ведения инструмента в полученную точку с визуальным или ди-
намометрическим (телеметрическим) контролем правильности.
6. В случае необходимости корректировка расположения ин-
струмента полуавтоматическим способом и автоматическая ре-
гистрация новых координат соответствующей точки.
7. Передача полученной, уточняющей информации управляю-
щей ЭВМ и проведение ек) соответствующего уточнения матема-
тической модели.
Такая двухэтапная методика автоматизации процессов уп-
равления является единственно приемлемой, так как не пред-
ставляется возможным (по крайней мере, на данном этапе) по-
лучение абсолют/т достоверной (с точностью не более 1 см) мо-
дели животногр. Вместе с тем программа, реализующая абст-
рактную математическую модель, являясь самообучающейся, бу-
дет в процессе работы все точнее рассчитывать вывод инстру-
ментов в требуемые точки.
До настоящего времени в СССР не проводилось работ по
математическрму описанию животных, являющихся сырьевой ба-
зой для мясной промышленности. Математическая мо-
дель может не учитывать процессы, связанные с функциониро-
ванием животного как живого существа, а сводится в основном
к описанию животного как топологического объекта.
На схемах (см. форзац) показаны в обобщенном виде опера-
ции и группы операций гибкой автоматизированной системы пе-
реработки скота. Схема описывает взаимодействие между систе-
мой опознавания животных, ЭВМ с банком данных и микропро-
цессорами, управляющими рабочими органами. Система явля-
ется самосовершенствующейся. Робототехника представляется
разнородной: от простых перемещений в плоскостях (жесткий
кондуктор) до сложных криволинейных движений (разреза-
ние, съемка шкур и др.). Рассмотрим схему по этапам.
Подгон животных к убойной бухте. Эта операция может про-
изводиться путем перемещения в загоне с заданной скоростью
рабочего органа в виде планки, что приводит к вытеснению по
одному животному в сужающийся канал. Животное на некото-
рое время (порядка 10—20 с) попадает в шлюз опознания. Ха-
рактеристические параметры животного измеряются бесконтакт-
но на основе существующих систем опознания объектов (акусти-
ческих, лазерных, локационных). Полученные сведения' переда-
, ются в ЭВМ, с помощью которой происходит опознание живот-
ного, т. е. выдача полной информации на микропроцессоры для
последующих этапов производства.
На следующем этапе осуществляется жесткая фиксация жи-
вотного в кондукторе, обеспечивающая возможность закрепле-
ния животного вне зависимости от его массы и линейных разме-
ров. Конструкция кондуктора должна быть жесткой, но позво-
ляющей осуществлять допуск рабочих органов к соответствую-
121
щим частям туши для обработки. Для крупного рогатого cKoia
одновременно с фиксацией животного производится и его обез-
движивание с помощью электрического тока. Для свиней эле-
ктростимуляцию можно заменить обездвиживанием в среде уг-
лекислого газа (прохождение контейнера с животными через
туннель
с
газом). Существует мнение,
что.
тако|
п
мет^д ^обез-
движивания улучшает качество мяса. ' " '
:
. . ;> "Г НЗ ••••
Ответственной является операция убоя и сбора [Крови-.-.С^щь
.мощью микропроцессора полый нож вводится в область .сердца.
Сбор крови с одновременной ее стабилизацией осуществляется
с помощью пульсирующей вакуумной системы. В целях обеспе-.
чения необходимого ветеринарно-санитарного уровня кровь со-
бирают в отдельные емкости от 5—10 животных. , ,
Голову и конечности удаляют роботы, . имеющие рабочий
орган в виде пневмо- или гидроножниц. Отделенные суставд пе-
редаются на дальнейшую обработку. Головы должны быть пе.-.
ресажепы на кольцевой синхронный конвейер,,для ветеринарно-
санитарного осмотра. • ., Г. .
Разрез по белой линии производит технологический.'«робот.,
программируемый от обшей ЭВМ и имеющий.:сенсорную
<
-'под-
1
стройку с помощью собственного микропроцессора, Т-образпыяг
инструментом, обеспечивающим разрез шкуры и.ее подрезание
сС\...у на длине 50—100 мм. Края шкуры фиксируются и растя-
гиваются с помощью механических или криозахватов, направ-
ляемых системой управления ножа. Не исключено использова-
ние для забеловки лазеров.
Забеловка осуществляется колеблющимися зубчатыми ножа-
ми. Несколько одновременно работающих ножей устанавливают
на манипуляторах робота, который управляет аналогично робо-
ту для разреза по белой линии. Захваты разводят забеловап-
ную шкуру, частично отрывая ее от поверхности. Аналогов по-
добным машинам нет. При забеловке не исключается частичное
применение ручного труда.
Съемку шкуры целесообразно производить натяжением в
наиболее коротком направлении — от живота к спине. Забело-
ванные участки шкуры фиксируются на валики (жесткие или
гибкие), после чего отсоединяются фиксаторы забеловочпого
стенда. Валики приводятся во вращение н поступательное дви-
жение от живота к спине. После съемки валики останавливают-
ся, туша освобождает позицию, валики приводятся в обратное
вращение, шкура освобождается и попадает на конвейер, по ко-
торому идет на обработку. При съемке шкур возможно примене-
ние электростнмуляпии.
Удаление внутренних органов планируется пока вручную на
профилированную подложку, которая является и транспорти-
рующей емкостью. Эта операция совмещается с ветеринарно-са-
нитарным осмотром.
122
Разделка туш производится безопилочным способом — штам-
повкой. Направление разруба и виды отрубов определяются
дальнейшей переработкой. Схема разделки и границы разруба
связываются с геометрическими размерами и технологическими
характеристиками туши. Ножи управляются от центральной
ЭВМ'и'подстраиваются микроЭВЭД, Грубая настройка системы
ножей производится на партию и вид скота, подстройка — по
геометрическим характеристикам определенной туши.
Разруб осуществляется в горизонтальном положении при
введении во внутреннюю полость туши противоножей и упоров,
чтб обеспечнт'чистьги срез.
В настоящее
1
'время в цехах убоя скота и разделки туш заня-
то около 38 600 рабочих. Уровень ручного труда (по применяе-
мой методике "расчета
1
')
1
'в среднем по отрасли составляет 76,9%.
'Внедрение 'ГАСПС,
:
йо предварительным подсчетам, позволит
высвободить nd отрасли 20—24 тыс. рабочих, занятых на ручных
операциях, с фондом заработной платы 40—50 млн. руб.
Учитывая специфику размещения, а также мощность пред-
приятий мясной промышленности, реальное внедрение будет в
1,5—2,5 раза меньше. Исходя нз этих соображений, можно при-
нять производительность линий; по крупному рогатому скоту —
400 голов в смену, по свиньям —.800 голов в смену. Выбранная
производительность линий не является окончательной и подле-
жит корректировке. Такие линии могут быть установлены на
предприятиях мощностью от 50 т в смену и выше.
ОБРАБОТКА ПТИЦЫ
Продуктами первичной обработки птицы являются мясо
(тушка или фасованное), пищевые субпродукты (сердце, печень,
мышечный желудок, шейка), перопуховое сырье и технические
отходы, используемые для производства животных кормов, био-
логически активных препаратов и гидролизатов.
Технологический процесс обработки птицы осуществляется в
следующей последовательности: доставка птицы к месту обра-
ботки; оглушение; убой и обескровливание; удаление оперения;
потрошение или полупотрошение; охлаждение; сортировка;
маркировка; упаковывание тушек.
Доставка птицы к месту обработки. На убой птицу принима-
ют с чистым оперением по количеству и живой массе. Птица по-
ступает на птицеперерабатывающие предприятия на автомаши-
нах в контейнерах, которые разгружают с помощью электрота-
ли или электропогрузчика. Контейнеры с птицей взвешивают и
устанавливают над погрузочной горловиной ленточного транс-
портера. Из контейнера птицу выгружают путем последователь-
ного выдвижения поддонов, начиная с нижнего яруса (рис. 26).
Допускается подача птицы на убой в передвижных клетках.
Одновременно обрабатывают птицу только одного вида и воз-
123
'•I I Н'НП! л 'J! r
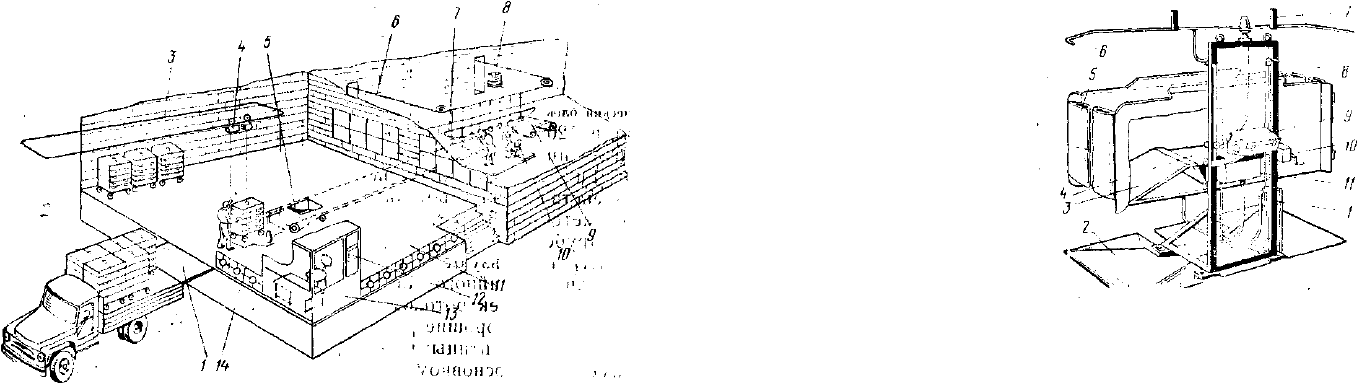
Рис. 26. Прием и навешивание птицы на конвейер убоя:^/
1 - откидная площадка: 2- контейнер для птицы; 3— подвесной
1
«уть; 4 теЛьфер; ^1'
бункер; в -- пространственный конвейер; 7— ориентирующее- уекройсгпчо; 8 счетное yci
ройство; 9- ленточный конвейер для подачи птицы; 10 ~ • рабочий стул; // - эстакада.
12 - счетное устройство (дистанционное); 13 — кабина приемщика^ нтиАы; 14 несы
раста. На конвейере птица подсчитывается с помощью специ-
ального счетного устройства.
Оглушение птицы. Для удобства выполнения операций убоя,
улучшения санитарного состояния производства и более полного
обескровливания птицу оглушают. На отечественных птицепе-
рерабатывающих предприятиях широко • используют электроог-
лушение, которое осуществляется автоматически в специальных
аппаратах.
Режимные параметры оглушения различны в зависимости от
вида и возраста птицы. При использовании неременного тока
промышленной частоты (50 Гц) рекомендуется напряжение
550/950 В, сила тока 25 мА, переменного тока повышенной час-
тоты (3000 Гц)—260/300 В. Продолжительность оглушения кур
и цыплят составляет 15—20 с, уток, гусей и индеек — 30 с.
Использование электротока повышенной частоты значитель-
но уменьшает нарушения сердечной деятельности, наблюдав-
шиеся обычно при оглушении птицы током промышленной час-
тоты и нередко заканчивающиеся параличом сердечной мышцы.
Процесс оглушения птицы постоянно совершенствуется, разт
рабатываются новые способы, направленные на снижение на-
пряжения переменного тока промышленной частоты и сокраще-
ние продолжительности. В последние годы для электрооглуше-
ния в качестве контактной среды используют воду или слабый
раствор хлорида натрия (рис. 27). В этом случае рабочее на-
пряжение переменного тока составляет 90/110 В для кур и цып-
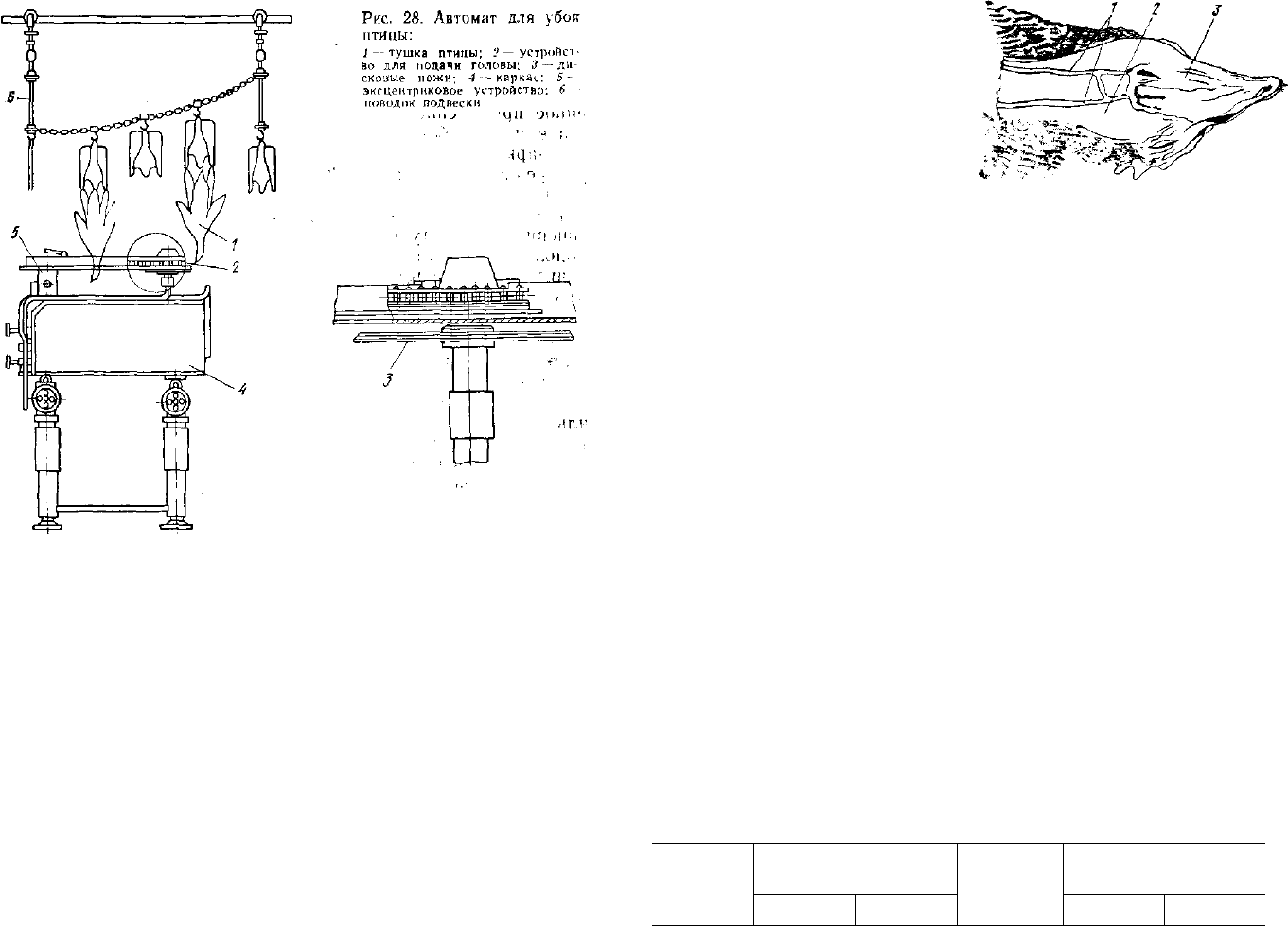
Рис. 27. Аппарат для электрооглу-
шения птицы:
/ — стойка; 2 — углубление для стока во-
ды; 3 — ванна; 4— резервуар ванны; 5 —
щитки; 6 — направляющая; 7 каркас
подвесного пути; 8 — направляющая карет-
ка; 9 -каретка; 10 — лебедка; 11— элект-
рический блок
лят и 120/135 'В-'Для уток, гу-
сей-^...индеек,частота
!
тока
50 Гц: Продолжительность
воздействия электротока со-
кращается до 6 с.
Зарубежные f фирмы
(США) используют "автоматы
для двухстадийно'га; оглуше-
ния птицы электротоком, что
обеспечивает хорошие результаты.
Оглушение птицы в атмосфере диоксида углерода нашло
применение в основном в зарубежной практике (США, Англия).
Оптимальная концентрация диоксида углерода для цыплят и
кур — 30—40%, для уток —50—60, гусей и индеек — 70—75%.
Продолжительность оглушения 2—3 мин. Оглушение птицы га-
зовой смесью способствует сокращению времени тепловой обра-
ботки в результате, ослабления удерживаемости оперения.
Убой и обескровливание. Убой птицы производят не позднее
чем через 30 с после оглушения. Должно быть полное обескров-
ливание тушек, что влияет на их качество (у недостаточно обес-
кровленных тушек образуются красные пятна на крыльях и
крестце). Плохое обескровливание снижает срок хранения мяса
птицы.
Убой птицы производят наружным и внутренним способами.
В отечественной промышленности наибольшее применение на-
шел наружный способ убоя, не требующий высокой квалифика-
ции рабочих, позволяющий проводить более полное и быстрое
обескровливание тушек. Наружный способ убоя используют при
обработке птицы на автоматизированных линиях. При этом от-
резается затылочная часть головы на уровне глазных впадин.
Используемый автомат для убоя обеспечивает полное обескров-
ливание тушек (рис. 28). При этом способе возможна механиза-
ция и автоматизация. К недостатку следует отнести нарушение,
целостности кожи и в связи с этим при снятии оперения в биль-
ных машинах у тушек часто отрывается голова.
На ряде предприятий используют наружный односторонний
и двусторонний способы убоя. При одностороннем способе раз-
рез делают на голове на 15—20 мм ниже ушной мочки у сухо-
путной или уха у водоплавающей птицы, перерезают ножом
кожу, яремную вену, ветвн сонной и лицевой артерий. Во избе-
жание отрыва головы при дальнейшей обработке длина разреза
не должна превышать 10—15 мм у цыплят и кур и 20—25 мм у
125
уток, гусей и индеек. При двустороннем способе производят про-
кол шеи ножом на 10 мм ниже ушной мочки. Одновременно
перерезают правую и левую сонные артерии и яремную вену, не
повреждая пищевод и трахеи. Длина разреза не должна превы-
шать 15 мм. Способ прост и нетрудоемок, на одну голову затра-
чивается 1,2—1,7 с.
Внутренний способ убоя заключается в перерезании крове
1
носных сосудов полости рта птицы. Ножницами с остроотточен-
ными концами перерезают сплетение яремной и мостовой вен
в задней части неба над язычком (рис. 29) Внутренний способ
используют при обработке тушек в полупотрошеном виде.
Птицу обескровливают над специальным желобом в течение
90—120 с для цыплят и кур и 150—180 с для уток, гусей, инде-
ек. Выход крови приведен в табл. 34.
Удаление оперения. Удаление оперения сопряжено с преодо
лением силы удерживаемости пера, которая зависит от вида и
возраста птицы, вида оперения, размеров и глубины залегания
очина пера и nvxa. Так. глубина залегания очина пера гусей со-
ставляет у махового оперения 53 мм, а покровного оперения—г
6,5 мм. Соответственно сила удерживаемости оперения состав
ляет 25,4 и 4,4 Н на одно перо.
1
Ой
Силу удерживаемости опе-
рения в коже птицы в основ-
ном снижают с помощью теп-
лового воздействия (горячей
водой или паром). Промыш-
ленное применение в нашей
стране и за рубежом получи-
ла шпарка горячей водой при
трех режимах: жестком (58—
65°С), среднем (52—54°С) и
мягком (не выше 51 °С). По-
вышение температуры воды и
продолжительности обработки
значительно сказывается на
изменении с и л ы'
:
у д е р ж i *. в а с м о с т и оперения. Оперение крыльев,
головы"и шеи сухопутной птицы имеет наибольшую силу удер-
живаемости. Для сохранения качества тушки производят до-
полнительную 'тепловую обработку (подшпарку) только этих
участков. _
Оперение водоплавающей птицы плотнее, чем сухопутной,
сильно развит пуховой покров, жировая смазка, предохраняю-
щая перовой покров от намокания в воде, препятствует проник-
новению горячей воды. Поэтому тушки водоплавающей птицы
следует обрабатывать при более высоких температурных пара-
метрах.
Тушки обрабатывают горячей водой в специальных ваннах
с автоматическим регулированием температуры, погружая или
орошая их. Шпарка орошением обеспечивает уменьшение мик-
робиальной обсемененности тушек.
В случае применения метода погружения, с целью снижения
микробиальной обсемененности н удерживаемости оперения ре-
комендуется использовать 0,002—0.004%-ный раствор соляной
кислоты. При этом величина рН снижается до 6,5.
Для шпарки тушек птицы применяют распыление горячей
воды с последующей обработкой горячим воздухом с высокой
относительной влажностью. Это способствует повышению дли-
тельности хранения тушек.
Для обработки водоплавающей птицы на ряде предприятий,
помимо горячей воды, используют паровоздушную смесь. Обра-
ботку производят в паровых камерах.
Таблица 34
Вид птицы
Выход кропи
нии массе)
(н % к жи-
при убое
Вид птицы
Выход крови
вой массе)
(а % к жи-
при убое
наружном внутреннем
наружном внутреннем
Цыплята 5,0 4,3 Гуси 5,0 4,9
Куры 4,1 3,0 Индейки 5,6 3,9
Утки 5,1 4,8
Рис. 29. Голова и верхняя часть шеи
курицы:
/ — яремные вены; 2 — место соединении
яремных вен с мостовой; 3 — небная щель
127
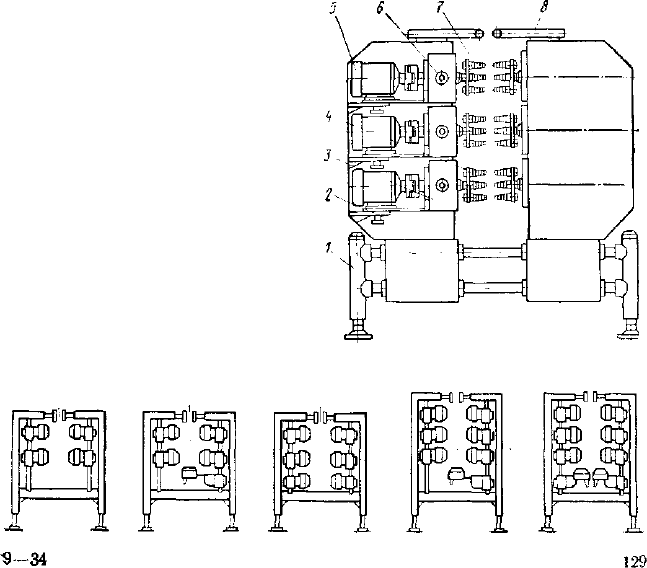
Таблица 35
Вид птицы
Температу-
ра, °С
Продолжитель-
ность, с
Примечание
Использование горячей воды
Куры
52-
-55
120
крылья, головы
60-
-65
30
Бройлеры
52-
-58
120—150
Индейки
51-
-54
!
150
крылья, головы
• 60--65
30
Утята
58-
-61
180
Утки 63-
-66
18Q
"
Гуси 70-
-72
120
Г1одшпарка
Подшпарка
Утята
Утки
Гуси
Использование паровоздушной смеси
66—72 150—180
72—75 150-180.
76-83 150—180'
Режимы тепловой обработки представлены в табл. 35.
Оперение следует удалять немедленно после тепловой обра-
ботки тушек, так как сила удерживаемости оперения через 15—
20 мин восстанавливается почти до первоначального значения.
Для удаления оперения применяют бильные машины или дис-
ковые автоматы. Характерной особенностью современного обо-
рудования является возможность варьирования усилия воздей-
ствия рабочих органов (бил или пальцев) на тушки. Это дости-
гается использованием комплекса машин для снятия оперения в
одной линии, а также рабочих органов различной жесткости,
возможностью изменения площади воздействия пальцев на туш-
ку' в результате изменения пространственного наложения рабо-
чих органов и варьирования силы воздействия их на тушку пу-
тем изменения частоты вращения бил или пальцев. Обработка
тушек в автоматах должна сопровождаться орошением водой
температурой 48—50 °С (рис. 30). Перо, снятое с тушек, смыва-
ется водой в гидрожелоб, расположенный в полу цеха под авто-
матами, и транспортируется для первичной его обработки.
В настоящее время сотрудники НПО «Комплекс» разрабатыва-
ют установку для одновременной шпарки и снятия оперения.
Для более тщательной очистки тушек сухопутной птицы от
волосовидного пера применяют опалку, а для освобождения от
остатков пуха и пеньков водоплавающей птицы используют вос-
кование. Волосовидное перо с тушек сухопутной птицы удаляют
в камере газовой опалки (температура 700°С, продолжитель-
ность 5—6 с). Пламя газовой горелки должно полностью охва-
тывать тушку, проходящую на конвейере, и сжигать волосовид-
ное перо, не повреждая кожи. Целесообразно для опалки тушек
использовать установки подвесного типа.
Воскование тушек водоплавающей птнцы проводят в ваннах
с паровым обогревом путем двукратного погружения в расплав-
128
ленную воскомассу (КИП или ВМЦ). Продолжительность каж-
дого погружения 3—6 с, выдержка для стеканпя воскомассы
между погружениями 20 с. Температура воскомассы КИП в пер-
вой ванне 62—65 °С, во второй — 52—54 °С, при воекованпн в
одной ванне— 52—54 °С. В случае использования воскомассы
ВМЦ температуру в первой ванне поддерживают 80—85 °С. во
второй — 70—75 С, при восковании в одной ванне — 75 — 80 °С.
Толщина воскового слоя по всей поверхности тушки составляет
1—2,5 мм. Воскованные тушки охлаждают водой температурой
не выше 4 °С в течение 90—120 с. Восковын слой удаляют в пе-
росъемных машинах. Использованную воскомассу нагревают до
90—95 °С и регенерируют (очищают от пеньков, остатков пера
и пуха и других загрязнений) центрифугированием.
Воскомасса КИП представляет собой сплав парафина с от-
вердевшим оксидом кальции и канифолью в соотношении 1: 1.
Пенькоснпмающая способность 40—42%.
Воскомасса ВМЦ-1, ВМЦ-2 состоит из дешевых и доступных
продуктов нефтехимической промышленности. Она устойчива к
воде и высоким температурам, обладает большой пластично-
стью и хорошими адгезионными свойствами, что позволяет зна-
чительно повысить качество обработки тушек. Пенькоснпмаю-
щая способность — 70—80%.
Потрошение и полупотро-
шение. При потрошении у
тушки удаляют ноги, голову с
шеей и все внутренние орга-
ны. Потрошение позволяет
провести тщательную ветери-
нарно-санитарную экспертизу
тушки и внутренних органов,
обеспечивает выпуск обрабо-
танной продукции и дает воз-
Рис. 30. Дисковый автомат для сня-
тия оперения:
и — схема машины: / — телескопические
опоры; 2- корпус: Я—рабочие ряды; 4 —
рабочие диски; J — электродвигатель; 6 —
шаровые цапфы; 7—рифленые вальцы:
<•* — направляющая, б — схема расположе-
ния рабочих рядов

Рис. 31. Схема поточно-ме-
ханизированной линии пот-
рошения:
/ — подвесной конвейер: .' -
устройство для мойкн подвесок.
.1 — машина для отделения м»
лов; 4— устройство для сбора и
пневмотранспоргнпования oi м.-
дов; 5 —
машина,
для
ОТДС.Н-HHV
ног; в — транспортеры; 7 —
шнна дли разрезания кожи шеи.
S — устройство для иыргтанн»
клоакн; 9 автомат .для ичи.-и
ченнн внутренних органов; I" —
место вегерннарно-санитарии! •
эксперта; (( -- машина для uf.
раб-лкн мышечных желудков; 12— пневмотранспортер отходов; 13 машина дли <н •
де.н-ння
шеи: 14 - •
билыш-моечная машина.
I:''
— устройство
для
сброса
IVIUCK;
1ь
счогчик
можиость полного использования пищевых и технических от-
водов. Тушки потрошат на специализированном конвейере над
системой желобов для сбора и транспортирования потрохов и
отходов (рис. 31).
Потроха (сердце, печень, желудок и шея) после ветеринар-
но-санитарной экспертизы охлаждают в ледяной воде темпера-
турой 2—4 °С в течение 10 мин, разбирают на комплекты, упако-
вывают в пакеты из целлофана или полимерной пленки и пода-
ют к месту вкладывания в потрошеные и охлажденные тушки.
Потроха можно использовать для выпуска суповых наборов или
наборов для студня. Головы и ноги идут на пищевые цели или
для производства сухих кормов.
Технические отходы (кишечник, зоб, трахея, пищевод, селе-
зенка, семенники), а также легкие и почки направляют на' выра-
ботку кормовой муки. „Тушки после мойки изнутри и снаружи
охлаждают.
Полупотрошение тушек — это удаление кишечника с клоа-
кой. В случае наполненного зоба птицы его необходимо удалять
через разрез кожи. Операции проводят вручную. У полупотро-
шеных тушек полость рта и клюв очищают от кормов и крови,
ноги — от загрязнений.
Охлаждение. Потрошенные тушки перед сортировкой и упа-
ковкой охлаждают (температура в толще грудной мышцы долж-
на быть не выше 4 °С) в воздушной или жидкой среде
(рис. 32). Тушки с конвейера охлаждения автоматически сбра-
сываются на лоток и подаются на сортировку, маркирование н
упаковывание.
Сортировка и маркировка. Охлажденные тушки сортируют по
упитанности и качеству технологической обработки на две кате-
гории— первую и вторую. Каждую партию тушек осматривает
ветеринарный врач. Предприятие гарантирует соответствие ка-
чества выпускаемого мяса птицы требованиям технических ус-
ловий.
Тушки маркируют электроклеймом (первая категория —
цифрой 1, вторая — цифрой 2) или наклеиванием этикеток, кро-
.130
Рис. 32. Установка для- комбинированного контактного охлаждения потро-
шеных тушек птицы в воде:
1 — насос центробежный; 2 — ваииа для предварительного охлаждения; 3 — конвейерный
путь; 4 — ванна для окончательного охлаждения; 5 — машина для удаления влаги
ме индивидуально упакованных в пакеты из полимерной пленки.
Упаковывание. Перед упаковыванием тушки формуют. У пот-
рошеной тушки кожу шеи закрепляют под крыло, прикрывая
место разреза, крылья прижимают к бокам. Ноги гусей и индеек
заправляют в разрез брюшной полости. У полупотрошеной туш-
ки шею с головой прижимают к туловищу, крылья—к бокам.
У тушек уток и утят ноги выворачивают, в заплюсневых суста-
вах, заводят за спину. Тушки упаковывают в полимерные пле-
ночные маркированные пакеты с помощью упаковочного устрой-
ства. Упаковывание производят с вакуумированием и без него.
Установлено, что при выпуске тушек птицы в упакованном виде
потери массы при охлаждении и замораживании снижаются
на 1,5%.
Фасование. Мясо птицы выпускается в виде целых тушек и в
фасованном виде. В последнем случае используют потрошеные -
тушки кур, уток, гусей и индеек первой и второй категории в ох-
лажденном состоянии и по качеству соответствующие требовани-
ям стандарта. Для фасования не допускаются тушки старых
петухов, тушки, имеющие темную пигментацию кожи и с изме-
нившимся цветом мышечной ткани и жира.
В зависимости от массы тушки птицы разделяют на две или
четыре части. При фасовании на полутушки тушку распиливают
вдоль позвоночника и по линии киля грудной кости (куры, утя-
тя). При фасовании на четыре части тушки вначале разделяют
на половинки, затем каждую полутушку делят пополам по ли-
нии, проходящей посередине длины тушки, перпендикулярно
позвоночнику между концом лопатки и тазобедренным суставом.
Крыло отделяют по локтевой сустав и добавляют к задней ча- .
сти тушки в качестве довеска. Затем каждую порцию фасован-
ного мыса птицы упаковывают в пакеты (целлофан, полиэти- -
лен). Отклонения в массе допускаются в пределах ±1%.
9*
131

Организация технологического потока обработки птицы.
В настоящее время на птицеперерабатывающих предприятиях
птицу перерабатывают на поточно-механизированных и автома-
тизированных линиях (рис. 33). Обработка птицы проводится
на подвесных конвейерах, объединяющих выполнение ручных,
механизированных и автоматизированных операций. На линиях
предусмотрены рабочие места для ветеринарно-санитарных экс-
пертов. Применяют конвейеры специализированные, предназна-
ченные для раздельной обработки сухопутной и водоплавающей
птицы, и универсальные, на которых перерабатывают все виды
птицы. При полной загрузке специализированного конвейера
обеспечивается более высокая производительность труда п боль-
шая рентабельность. При неполной загрузке более выгодны уни-
версальные конвейеры.
Производительность конвейерных линий следующая: линии
переработки сухопутной птицы — 500. 1000. 2000 кур в час н
3000, 6000 бройлеров в час (последняя линия разработана сов-
местно со странами СЭВ, в ней предусмотрена механизация и
автоматизация технологических операций, в том числе в процес-
се потрошения птицы); линии переработки индеек — 500—
1000 голов в час; линии переработки водоплавающей птицы —
350, 500, 1000, 2000 голов в час (утки). Производительность уни-
версальной линии для потрошения 2000, 3000 голов в час. Зару-
бежные фирмы (Нидерланды) перерабатывают бройлеров на
автоматизированных линиях производительностью 9000 голов в
час и выше.
Обработка перопухового сырья. Пероиуховое сырье является
ценным сырьем для изготовления товаров широкого потребле-
ния и производства сухих кормов.
Перо и пух, снятые с тушек, транспортируются от автоматов
для снятия оперения в отделение обработки по гидрожелобу
(рис. 34).
Рис. 34 Схема поточной линии обработки пера производительностью
1440 кг/ч:
1 — гидрожелоб сбора и транспортирования пера; 2 — транспортер обезвоживания и вы-
грузки; 3— леиточио-скребковый транспортер загрузки моечной машины; 4 — машина для
мойки пера; Л — центрифуга; 6 — тельфер; 7 — монорельс; « — сетка для выгрузки пера;
9 — питатель; 10—сушилка пера; // — сортировочный двухкамерный аппарат; 12 — каби-
на затарнваиня мелкого и среднего пера; 13 — кабина затаривания подкрылка; /^ — воз-
духовод
133
При машинной обработке птицы снятое перо сильно загряз-
нено и содержит до 100% воды к собственной массе. Перопухо-
вое сырье частично обезвоживают на сепараторе или транспор-
тере, затем моют в моечных машинах с использованием моющих
средств (2 кг на 100 кг куриного пера) при температуре 30—
40 °С в течение 10—30 мин, прополаскивают холодной водой и
удаляют излишнюю влагу в центрифугах. Перо и пух сушат в
сушильных аппаратах при температуре 70—95 °С. Продолжи-
тельность сушки 12—40 мин в зависимости от вида сырья и кон-
струкции сушилки. Влажность высушенного перопухового сырья
не должна превышать 12%.
Высушенное перопуховое сырье по воздуховоду транспорти-
руется в сортировочный аппарат (одно-, двух-, трехкамерный)
для разделения на фракции (пух, мелкое и среднее перо, под-
крылок), а затем на склад для затаривания в мешкн массой
15—20 кг или в прессы для упаковки пера в тюки по 30—40 кг.
Каждый мешок и тюк маркируют.
Высушенное перопуховое сырье хранят в штабелях высотой
3 м в сухих и хорошо проветриваемых помещениях при темпе-
ратуре не выше 15 °С.
ОБРАБОТКА КРОЛИКОВ
Кроликов на убой принимают по количеству, массе и упитан-
ности. Во избежание закусов, снижающих ценность шкурок,
кролики находятся по одному в специальной клетке.
Технологическая схема убоя и обработки кроликов включает
•следующие основные операции: оглушение; убой и обескровли-
вание; отделение передних ног и ушей; забеловку и съемку шку-
рок; нутровку тушек; отделение задних ног; туалет и формовку;
сортировку; маркировка и упаковывание тушек.
Оглушение. Наиболее распространенными способами являют-
ся оглушение кроликов электрическим током и механический.
Для электрооглушения используют аппараты карусельного и
транспортерного типа, пистолет с дугообразным захватом и др.
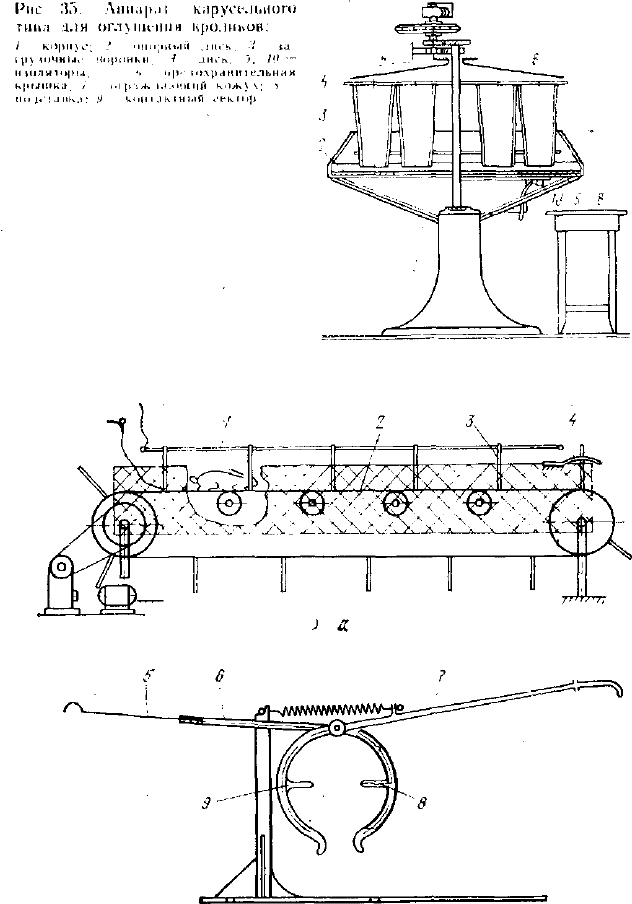
В аппарате карусельного типа (рис. 35) применяют электриче-
ский ток промышленной частоты силой 0,5 А и напряжением
20 В, продолжительность оглушения 3 с.
В аппарате транспортерного типа (рис. 36) используют элек-
троток промышленной частоты 36 В, продолжительность оглуше-
ния 35—40 с.
В пистолете с дугообразным захватом потребляемое напря-
жение 40 В, сила тока 0,18 А, продолжительность оглушения 2 с.
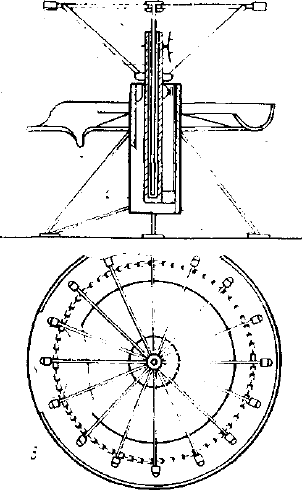
НПО «Комплекс» предложил для электрооглушения кроли-
ков использовать бокс (рис. 37), который представляет собой
вращающуюся решетчатую площадку, установленную на изоли-
рованной подставке. Площадка разделена на четыре отделения
и по всему периметру ограждена металлической сеткой. Кроли-
ков оглушают с помощью пистолета с дугообразным захватом.
134
5
Рис. 36. Аппарат для огл)шеиня кроликов транспортерного типа:
л — схема: бклещеобразные зажимы, 1 — медная груб*-'. ' — лента транспортера;
,4 —стойки: 4— копир; 5 — кон i зк i нам мружииа; ft" — н,-пидьижный рычаг; 7— по-
движный рыч;н; ft--контакты
Сотрудники Украинского
научно-исследовательского ин-
ститута мясной и молочной
промышленности разработали
установку для оглушения кро-
ликов механическим спосо-
бом — с помощью ударного
устройства (удар наносится в
лобовую часть головы).
Убой и обескровливание.
В настоящее время на боль-
шинстве предприятий убой
кроликов осуществляют в ап-
парате с отрезанием головы
(основным рабочим органом
машины является дисковый
нож). Удаление головы уско-
ряет процесс обескровлива-
ния, облегчает забеловку и
съемку шкурок с тушек. Кро-
ме того, для предприятий ме-
ховой промышленности целе-
сообразно получать шкурки без головной части. Головы кроли-
ков после удаления волосяного покрова используют для выра-
ботки сухих животных кормов.
На ряде предприятий убой производят путем вскрытия сон-
ных артерий. Автоматически производится просечка головы
полым пуансоном для свободного выхода крови. Продолжи-
тельность обескровливания при любом способе убоя 2,5 мин.
Отделение передних ног и ушей. После обескровливания у
тушек кроликов дисковым ножом отрезают передние ноги по
запястный сустав и уши у основания.
Забеловка и съемка шкурок. Забеловку производят вручную.
Шкурку снимают вручную, стягивая ее от хвоста к голове, не
повреждая при этом шкурки, или машиной. Снятые шкурки очи-
щают от прирезей мяса, жира, сухожилий и направляют на даль-
нейшую обработку.
Нутровка тушек. Нутровку тушек производят вручную (поч-
ки с почечным жиром остаются при тушке). Одновременно туш-
ки, их внутренние органы подвергают ветеринарно-санитарной
экспертизе. Субпродукты (сердце, печень, легкие) и шею после
промывки и охлаждения упаковывают. Технические отходы,
получаемые при убое и обработке кроликов (кровь, кишки, же-
лудок, головы, ушные хрящи, ноги, прирези мяса и жнра со
шкурок), используют для выработки сухих кормов.
Отделение задних ног и головы. Удаляют голову (если ее не
удалили при убое), задние ноги (но скакательный сустав) с по-
мощью дискового ножа.
Z 1
Рис. 37. Схема бокса для элсктроог-
лушеипи кроликов;
I- приемный еюл: -— вращающаяся клет-
ка; ,'1 — и тлирующая подставка
Туалет и формовка тушек.
Удаляют кровоподтеки, поби-
той- н. зачищают шейный за-
рез, смывают остатки крови и
шерсти. Для формовки дела-
ют на тушке разрезы по бо-
кам грудной клетки между
третьим и четвертым ребрами
и в них вправляют копны пе-
редних ног.
Сортировка, маркировка и
упаковывание. Тушки кроли-
ков сортируют в зависимости
от упитанности и качества об-
работки на I и II категории.
Тушки, не удовлетворяющие
по упитанности требованиям
II категории, относят к не-
стандартным и испо.ты\ К)Г
для промышленной переработ
ки. Тушки кроликов-бройле-
ров относят к I категории.
Тушки кроликов маркиру-
ют электроклеймением. На
каждую тушку накладывают
одно клеймо на внешней сто-
роне голени: у тушек I кате-
гории - круглое, у тушек
II категории — квадратное.
Тушки упаковывают в де-
ревянные, металлические или полиэтиленовые оборотные ящи-
ки (не более 20 штук в один ящик), дно и стенки которых вы-
стилают оберточной бумагой.
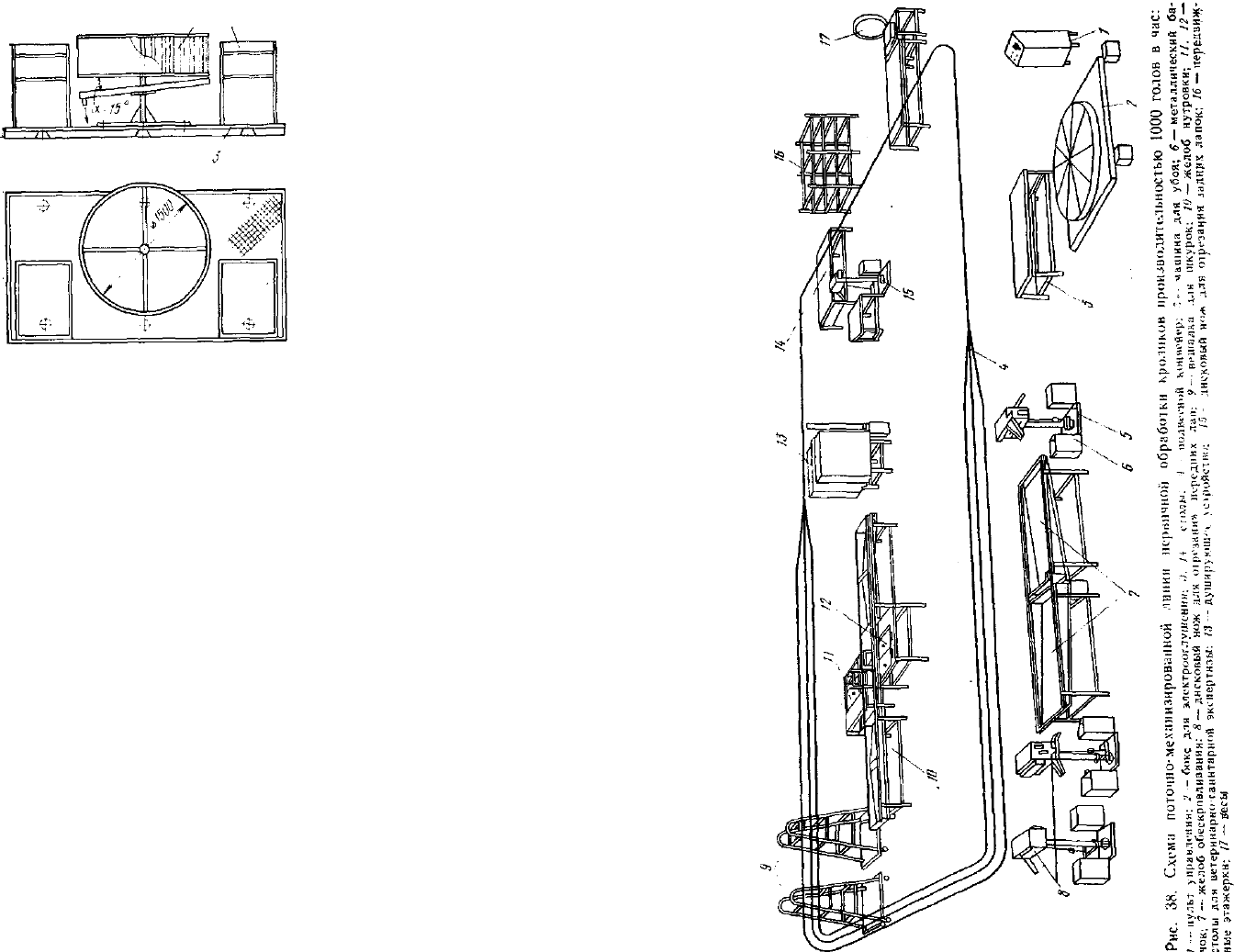
Организация технологического потока обработки кроликов.
Кроликов обрабатывают иа поточно-механизированных линиях
производительностью 500 и 1000 голов в час (рис. 38). Для пе-
реработки небольших партий кроликов используют агрегат ка-
русельного типа производительностью 120—150 голов в час
(рис. 39), все операции на котором производят вручную в такой
же последовательности, что и на поточно-механизированной ли-
нии.
Первичная обработка шкурок кроликов. Шкурки после съем-
ки остывают в подвешенном состоянии в течение 1 ч. Затем их
натягивают на стандартные правилки мехом внутрь и обезжири-
вают. Шкурки консервируют пресно-сухим методом (сушат при
температуре 30—35 °С и относительной влажности воздуха 45—
60% ДО влажности шкурки 14—16%) и кислотно-солевым спосо-
бом (продолжительность выдержки шкурок 7 ч).
Риг. 39. Агрегат карусельного гина
для убоя кроликов:
/ - станина; 1
—
лоток для слива крови;
•I трубчатая колонка; 4 - стержень с ко-
лонкой; .5- растяжки: 6 подвески для
навешивания тушек; 7 - желоб для сбора
кроми и внутренних, оршноп; 8 - - цепочка
Глава 4
ОБРАБОТКА ПИЩЕВЫХ СУБПРОДУКТОВ
И ЭНДОКРИННО-ФЕРМЕНТНОГО СЫРЬЯ
ОБРАБОТКА СУБПРОДУКТОВ
Субпродукты — это внутренние органы и части животного,,
получаемые при переработке скота. В зависимости от использо-
вания различают пищевые и технические субпродукты.
Характеристика субпродуктов. Морфологическое строение-
субпродуктов различное. Так, конечности состоят в основном из
костной и соединительной ткани, печень, легкие, мозг — из па-
ренхиматозной, сердце — из мышечной, соединительной и жиро-
вой. Особенности их строения учитывают при обработке. Суб-
продукты условно делят на 4 группы: мясокостные — головы (без
шкуры, языков и мозгов), мясокостные хвосты, цевки; мякот-
ные — ливер (печень, сердце, легкие, диафрагма, трахея в их ес-
тественном соединении), почки, селезенка, мясная обрезь, вымя,,
язык, мозги, глотка с гортанью:—калтык; слизистые (имеющие
слизистую оболочку)—рубцы, книжки (летошки) и сычуги
крупного рогатого скота, рубцы мелкого рогатого скота и сви-
ные желудки; шерстные — головы свиные, бараньи (в шкуре)
без языков и мозгов, путовый сустав крупного рогатого скота,,
ножки свиные и бараньи, губы говяжьи, уши свиные и говяжьи,
хвосты свиные.
Использование субпродуктов. В зависимости от морфологи-
ческого, химического составов и соответственно пищевой ценно-
сти обработанные субпродукты подразделяют на I и II кате-
гории.
После обработки субпродукты, рассортированные по видам и
наименованиям, немедленно направляют на охлаждение или за-
мораживание и, в зависимости от способа дальнейшего исполь-
зования, на реализацию или промышленную переработку. Воз-
можна их переработка также в готовые изделия непосредствен-
но после обработки в субпродуктовом цехе в парном состоянии..
Субпродукты занимают значительный удельный вес продук-
ции, получаемой при переработке сельскохозяйственных живот-
ных. Согласно нормам выход говяжьих субпродуктов I и II ка-
тегории (без учета некоторых потенциально пригодных к упот-
реблению на пищевые цели субпродуктов II категории) состав-
ляет до 20% к живой массе скота (в том числе около 14% II ка-
тегории), свиных— 18 и 14, конских— 16 и 10%.
Субпродукты I категории по пищевой ценности равноценны,
а по витаминному и минеральному составу некоторые из них
139.