Вольдек А.И. Электрические машины
Подождите немного. Документ загружается.

На рис. 10-13 кривая 4 представляет собой характеристику
n = f(M) при
Iша
^
Ъ —
0,5/
н
.
*\ша
Регулирование скорости включением сопротивления в цепь якоря
(рис. 10-12, в). Этот способ позволяет регулировать п вниз от номи-
нального значения. Так как одновременно при этом значительно
уменьшается к. п. д., то такой
способ регулирования на-
А
•*•
ходит ограниченное приме-
нение.
Выражения для скорост-
ной и механической характе-
ристик в этом случае полу-
чим, если в равенствах (10-20)
и (10-21) заменим R
a
на
R
a
+ Яр о- Характеристика
п = f {М) для такого способа
регулирования скорости при
Яра» = 0.5 изображена на
рис. 10-13 в виде кривой 5.
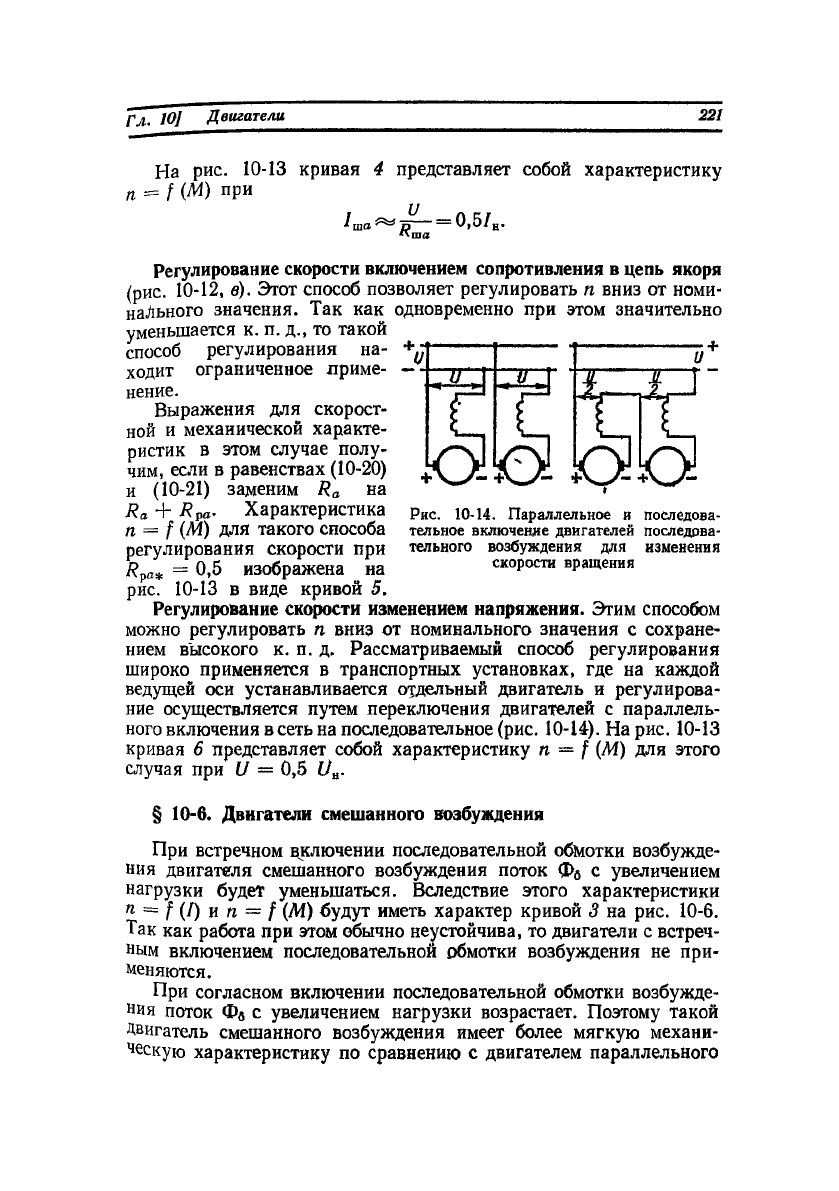
Регулирование скорости изменением напряжения. Этим способом
можно регулировать п вниз от номинального значения с сохране-
нием высокого к. п. д. Рассматриваемый способ регулирования
широко применяется в транспортных установках, где на каждой
ведущей оси устанавливается отдельный двигатель и регулирова-
ние осуществляется путем переключения двигателей с параллель-
ного включения в сеть на последовательное (рис. 10-14). На рис. 10-13
кривая 6 представляет собой характеристику п — f (М) для этого
случая при U = 0,5 i/
H
.
§ 10-6. Двигатели смешанного возбуждения
При встречном включении последовательной обмотки возбужде-
ния двигателя смешанного возбуждения поток ф
в
с увеличением
нагрузки будет уменьшаться. Вследствие этого характеристики
п = / (/) и п — f (М) будут иметь характер кривой 3 на рис. 10-6.
Так как работа при этом обычно неустойчива, то двигатели с встреч-
ным включением последовательной обмотки возбуждения не при-
меняются.
При согласном включении последовательной обмотки возбужде-
ния поток Ф
в
с увеличением нагрузки возрастает. Поэтому такой
Двигатель смешанного возбуждения имеет более мягкую механи-
ческую характеристику по сравнению с двигателем параллельного
Рис. 10-14. Параллельное и последова-
тельное включение двигателей последова-
тельного возбуждения для изменения
скорости вращения
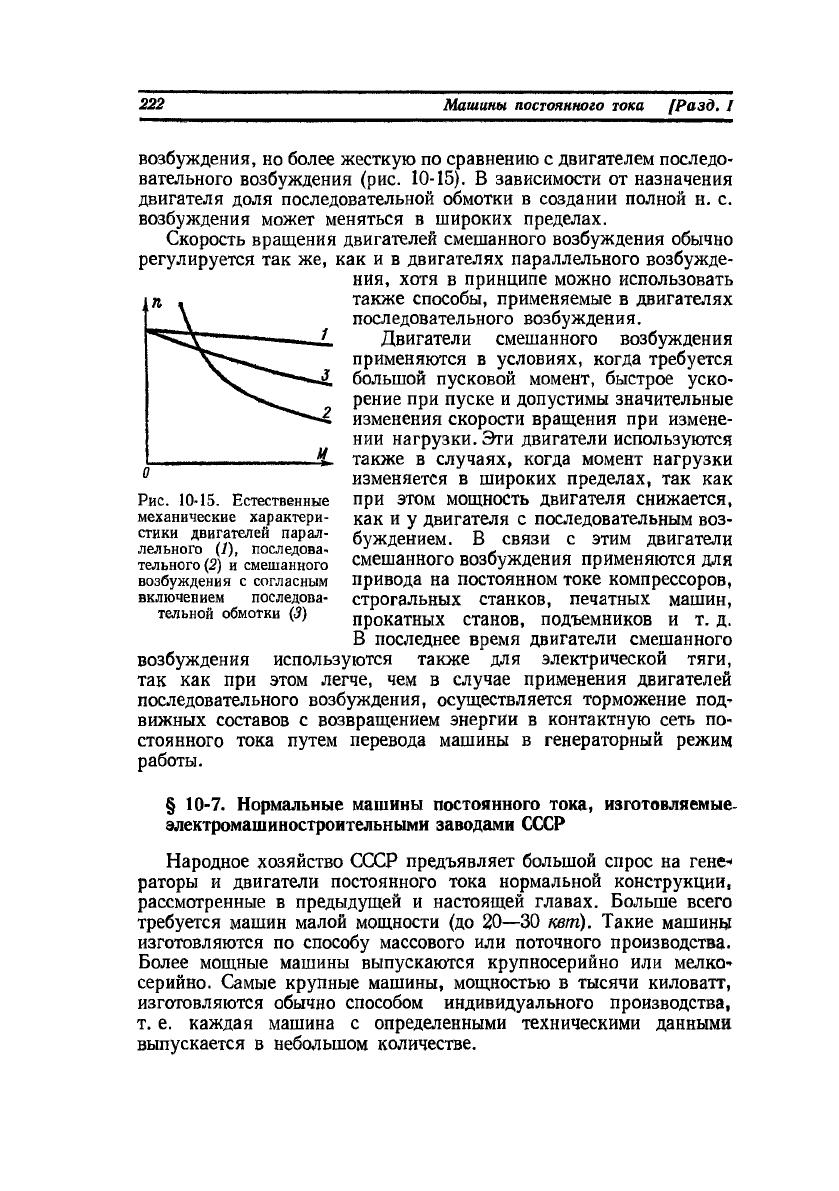
возбуждения, но более жесткую по сравнению с двигателем последо-
вательного возбуждения (рис. 10-15). В зависимости от назначения
двигателя доля последовательной обмотки в создании полной н. с.
возбуждения может меняться в широких пределах.
Скорость вращения двигателей смешанного возбуждения обычно
регулируется так же, как и в двигателях параллельного возбужде-
ния, хотя в принципе можно использовать
также способы, применяемые в двигателях
последовательного возбуждения.
Двигатели смешанного возбуждения
применяются в условиях, когда требуется
большой пусковой момент, быстрое уско-
рение при пуске и допустимы значительные
изменения скорости вращения при измене-
нии нагрузки. Эти двигатели используются
также в случаях, когда момент нагрузки
изменяется в широких пределах, так как
при этом мощность двигателя снижается,
как и у двигателя с последовательным воз-
буждением. В связи с этим двигатели
смешанного возбуждения применяются для
привода на постоянном токе компрессоров,
строгальных станков, печатных машин,
прокатных станов, подъемников и т. д.
В последнее время двигатели смешанного
используются также для электрической тяги,
легче, чем в случае применения двигателей
Рис. 10-15. Естественные
механические характери-
стики двигателей парал-
лельного (У), последова-
тельного^) и смешанного
возбуждения с согласным
включением последова-
тельной обмотки (3)
возбуждения
так как при этом
последовательного возбуждения, осуществляется торможение под-
вижных составов с возвращением энергии в контактную сеть по-
стоянного тока путем перевода машины в генераторный режим
работы.
§ 10-7. Нормальные машины постоянного тока, изготовляемые-
электромашиностроительными заводами СССР
Народное хозяйство СССР предъявляет большой спрос на гене-'
раторы и двигатели постоянного тока нормальной конструкции,
рассмотренные в предыдущей и настоящей главах. Больше всего
требуется машин малой мощности (до 20—30 кет). Такие машины
изготовляются по способу массового или поточного производства.
Более мощные машины выпускаются крупносерийно или мелко-
серийно. Самые крупные машины, мощностью в тысячи киловатт,
изготовляются обычно способом индивидуального производства,
т. е. каждая машина с определенными техническими данными
выпускается в небольшом количестве.
Машины массового и серийного производства проектируются
в виде серий, охватывающих определенный диапазон мощностей,
скоростей вращения и напряжений. Машины данной серии харак-
теризуются общностью конструктивных решений, технологии про-
изводства, применяемых материалов и т. д. В пределах серии стре-
мятся к возможно более широкой унификации узлов и деталей
машин. Это позволяет повысить производительность труда и уде-
шевить производство машин. Кроме основного исполнения машин,
в данной серии могут предусматриваться также определенные
модификации: по степени защиты от воздействия внешней среды
(см. § 8-5), по способу крепления машин (на лапах, фланцевые)
и т. д. Отдельным заводам обычно поручают изготовление машин
определенных участков серии. Время от времени, по мере совер-
шенствования способов производства, появления материалов повы-
шенного качества, возникновения новых потребностей народного
хозяйства, производится усовершенствование или модернизация
данной серии машин либо разрабатывается новая серия машин
с повышенными технико-экономическими показателями, заменяю-
щая старую.
В настоящее время электромашиностроительные заводы СССР
изготовляют машины постоянного тока ряда серий. Основной из
них является единая серия нормальных машин постоянного тока,
имеющая обозначение П и заменившая ря'д более узких старых
серий машин.
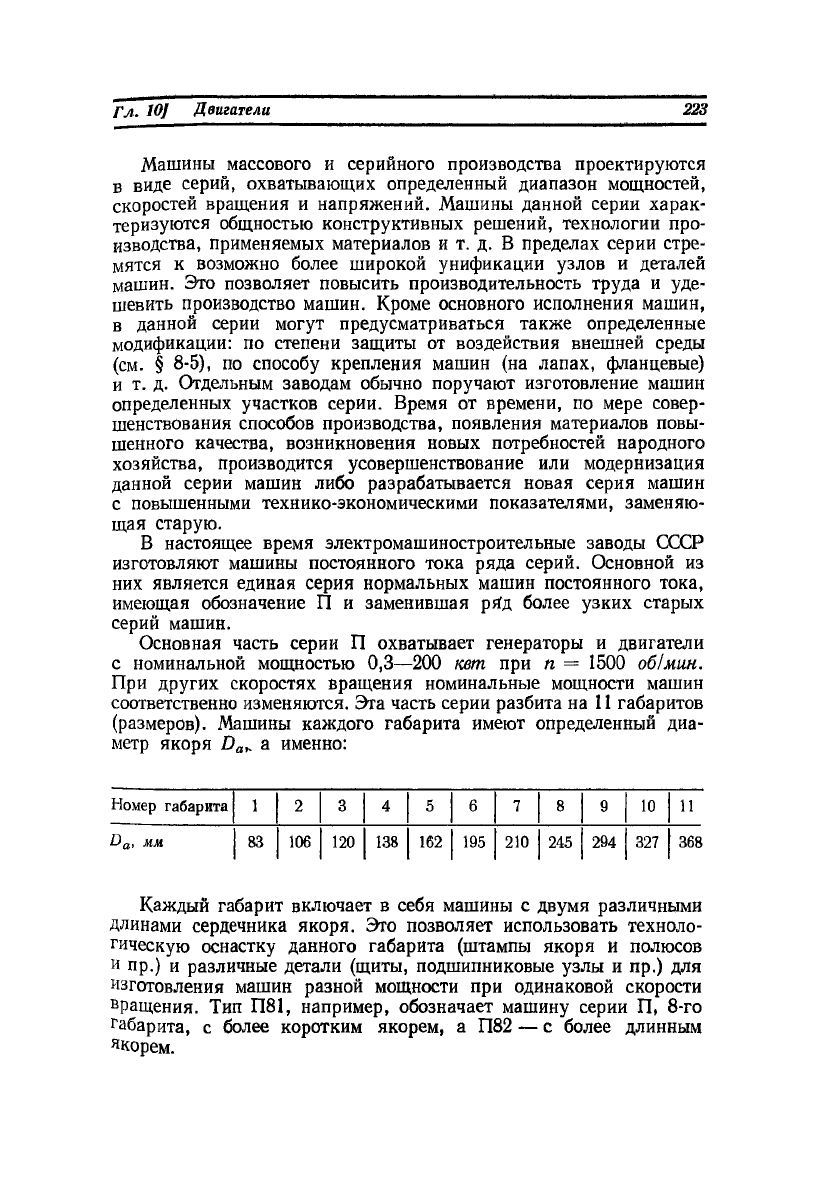
Основная часть серии П охватывает генераторы и двигатели
с номинальной мощностью 0,3—200 квт при п = 1500 об/мин.
При других скоростях вращения номинальные мощности машин
соответственно изменяются. Эта часть серии разбита на 11 габаритов
(размеров). Машины каждого габарита имеют определенный диа-
метр якоря D
a
„ а именно:
Номер габарита
1 2 3 4 5 6 7 8
9 10
11
Е>а<
мм
83 106
120
138 162
195
210
245 294 327 368
Каждый габарит включает в себя машины с двумя различными
длинами сердечника якоря. Это позволяет использовать техноло-
гическую оснастку данного габарита (штампы якоря и полюсов
и пр.) и различные детали (щиты, подшипниковые узлы и пр.) для
изготовления машин разной мощности при одинаковой скорости
вращения. Тип П81, например, обозначает машину серии П, 8-го
габарита, с более коротким якорем, а П82 — с более длинным
якорем.
Основное исполнение машины серии П Ъдиннадцати габаритов —
брызгозащищенное. Предусмотрена также модификация с закрытым
исполнением. Все машины изготовляются без компенсационной
обмотки, двигатели имеют легкую последовательную стабилизи-
рующую обмотку возбуждения, генераторы имеют смешанное воз-
буждение. Напряжение двигателей 110 или 220 в (верхний, более
мощный участок серии, — только 220 в) Напряжение генераторов
115 или 230 в (верхний участок — только 230 в). Предусмотрено
также изготовление генераторов для зарядки аккумуляторных
батарей с U„ = 135 в и i/
H
= 270 а, с регулированием напряжения
в пределах 110—160 в и 220—320 в. Генераторы выпускаются с но-
минальными скоростями вращения 1450 и 2850 об!мин, а двигатели
основного исполнения — с номинальными скоростями вращения
(при полном возбуждении) 600, 750, 1000, 1500 и 3000 об/мин.
Коллекторы машин 1—6-го габаритов выполняются на пластмассе.
Поскольку в каждом габарите имеются машины с двумя длинами
сердечника якоря и машины одного габарита и одной длины изго-
товляются на ряд скоростей вращения, количество разновидностей
машин получается достаточно большим.
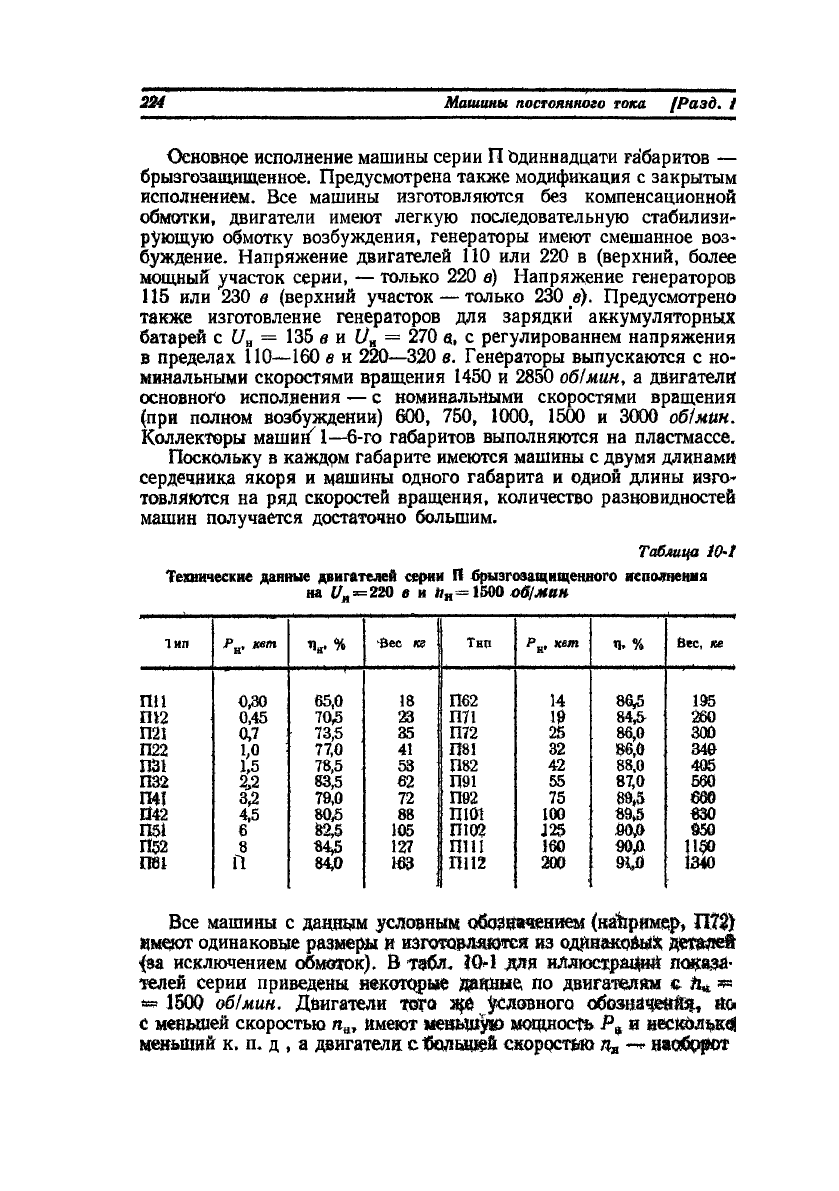
Таблица 10~1
Технические данные двигателей серии П брызгозащищенного исполнения
на
U„
=
220
в и
й„
=
1500
об]мин
1 ИП
Р
н
. «««
Чя- %
•Вес кг Тно Р
в
, кет
ч. %
Вес, ке
П11 о,зо
65,0
18 П62
14
86*5
195
П12
0,45
70,5
23
П71
10
84,5 260
П21
0,7 73,5 35
П72
25
86,0 300
П22
1,0 77,0 41 П81
32
86,0
88,0
349
mi 15
78,5
53
П82
42
86,0
88,0 405
ГШ
2,2
83,5 62
П91
55 ЩО
660
П41 3,2
79,0 72
П92
75
89,5
660
1342
4,5
80,5 88 ПШ1 100 89,5
.90,0
830
П51 6
82,5
105
П102
J25
89,5
.90,0 950
П52
8
84>5
127
ПШ
160
ш
}1§0
net
ft
84,0
163
П112
200
910
1340
Все машины с данным условным обозначением (например, ГО2)
Имеют одинаковые размеры и изготовляются из одйнакойы& деталей
{за исключением обмоток). В табл. 10-1 для иллюстраций показа-
телей серии приведены некоторые данные по двигателям с «=
— 1500 об!мин. Двигатели тото условного обозначеййв, по
с меньшей скоростью л
а>
имеют меньшую мощность Р
а
и иескддьк<|
меньший к, п. д , а двигатели с большей скоростью п
в
наоборот
Мощность и к. п. д. генераторов с га
н
= 1450 об!мин примерно такие
же, как у двигателей с га
н
= 1500 об/мин.
Серия П (1 — 11-й габариты) имеет также модификацию двига-
телей с широкими диапазонами регулирования скорости вращения
путем ослабления поля: 1 : 2,25; 1:3; 1:4; 1 : 6 и 1 : 8. Номиналь-
ные (наименьшие для данного двигателя) скорости вращения при
этом находятся в пределах 200—1500 об/мин. Максимальные ско-
рости вращения составляют 3000—3450 об/мин.
Для двигателей с диапазонами регулирования скорости враще-
ния 1 : 6 и 1 : 8 предусмотрено раздельное питание катушек обмотки
возбуждения с целью независимого регулирования потоков отдель-
ных полюсов (см. § 10-3).
Серия машин постоянного тока П включает в себя и более-мощ-
ные машины. Этот участок серии охватывает габариты от 12-го до
17-го; в каждом габарите также имеются две длины якоря. Двига-
тели этого участка изготовляются на U
n
= 220, 330, 440 и 660 в,
на мощности от 55 квт при п„ = 300 об/мин до 1400 квт при
1000 об /мин. Все двигатели имеют компенсационную обмотку и
могут быть использованы для привода вентиляторов, насосов, мел-
ких и средних прокатных станов и т. д. Изготовляются также гене-
раторы каждого типоразмера.
Кроме серйи П, имеется ряд других серий машин постоянного
тока более специализированною назначения (металлургические,
крановые, тяговые и пр.). В эксплуатации находится также много
машин старых серий, изгртовление которых прекращено. В част-
ности, до введения в производство серии П в течение многих лет
выпускались машйны серии ПН.
В настоящее время машины постоянного тока строятся обычно
с напряжением на коллекторе не более V
B
= 1500 в (тяговые двига-
тели магистральных электровозов постоянного тока.) Однако чаще-
всего машины постоянного тока выпускаются на напряжения до
750—900 в, так как с увеличением напряжения условия работы
коллектора и щеток усложняются и машина удорожается.
Более мощные машины изготовляются также с большим номи-
нальным напряжением, чтобы ограничить по возможности величину
тока якоря. В некоторых случаях крупные машины выпускаются
с двумя якорями на одном валу.
Выводы обмоток машины постоянного тока, согласно ГОСТ
183—66, обозначаются следующим образом: Я1—Я2—якорь, К1—
К2—компенсационная обмотка, Д1—Д2—обмотка добавочных полю-
сов, CI—С2 — последовательная (сериесная) обмотка возбужде-
ния, Ш1—Ш2 — параллельная (шунтовая) обмотка возбуж-
дения.
Более подробные данные о сериях электрических машин при-
водятся в специальных каталогах.
Глава одиннадцатая
СПЕЦИАЛЬНЫЕ ТИПЫ МАШИН ПОСТОЯННОГО ТОКА
§ 11-1. Специальные типы генераторов и преобразователей
постоянного тока
Во многих случаях к машинам постоянного тока предъявляются такие тре-
бования, которым машины нормальной конструкции не удовлетворяют. Это при-
вело к созданию ряда специальных типов машин постоянного тока. В данной главе
кратко рассматриваются некоторые типы подобных машин, которые получили
распространение на практике или имеют перспективы такого распростра-
нения.
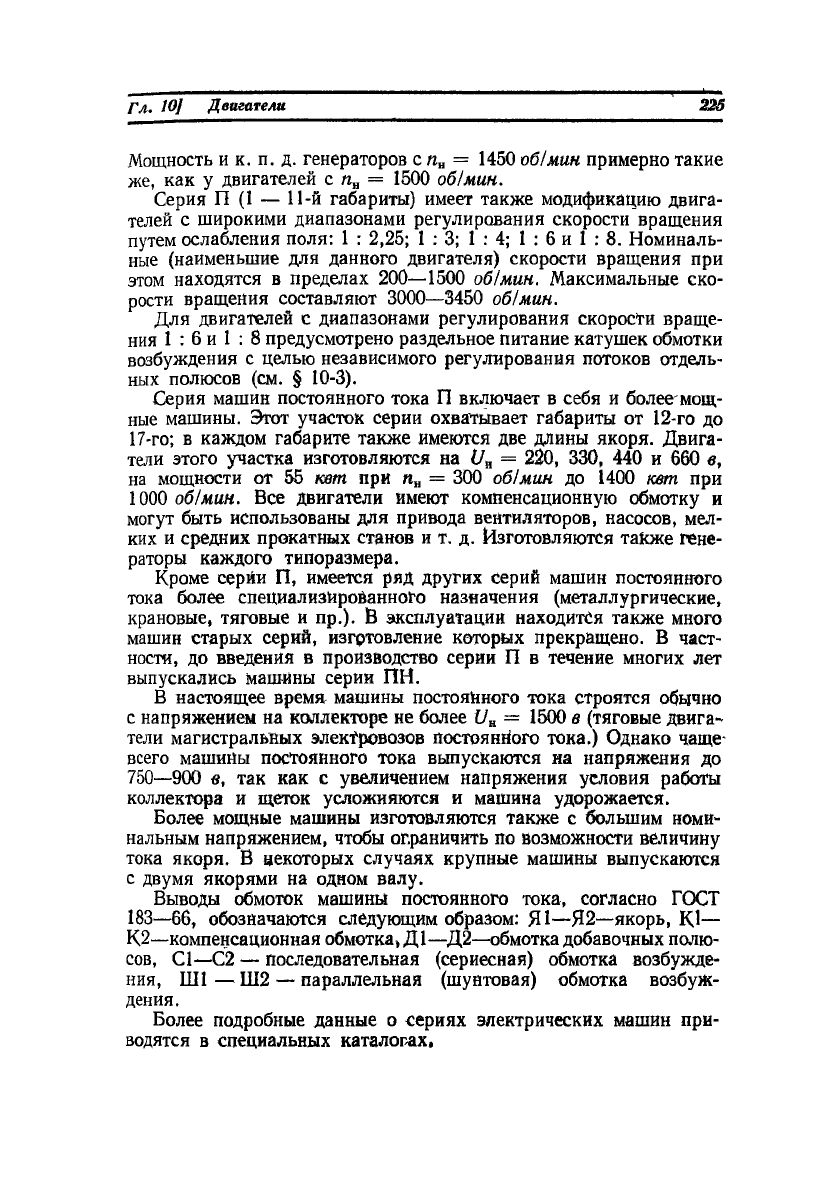
Генератор с тремя обмотками возбуждения. В ряде случаев требуется, чтобы
внешняя характеристика генератора имела вид, изображенный на рис. 11-1, а.
При характеристике этого вида в широком диапазоне изменения напряжения U
ток 1 изменяется мало и близок к току короткого замыкания /
к
. Такая круто па-
дающая внешняя характеристика же-
лательна, например, в случае электри-
ческой дуговой сварки, так как при
этом ток в дуге мало зависит от ее
длйны и короткое замыкание (сопри-
косновение электрода- со свариваемым
изделием) неопасно. Генераторы с та-
кой характеристикой целесообразно
использовать также для питания по
схеме Г—Д электродвигателя механиз-
ма, работающего на упор, например
экскаватора. В этом случае при за-
стревании и остановке механизма ток
и момент двигателя будут ограничены,
в результате чего исключается воз-
можность повреждения механизма или
машины.
Характеристику вида рис. 11-1, в
можно получить в генераторе с тремя
обмотками возбуждения: 1) независи-
мой, 2) параллельной и 3) последовательной (рис. 11-1, б), н. с. которой на-
правлена навстречу н. с. F\ + F$ первых двух обмоток. Такие генераторы
предложены инженером Ц. Кремером в 1909 г.
Генераторы с тремя обмотками возбуждения в Настоящее время применяются
в мощных экскаваторах с электрическим приводом, на тепловозах для питания
тяговых двигателей, а также в ряде других случаев.
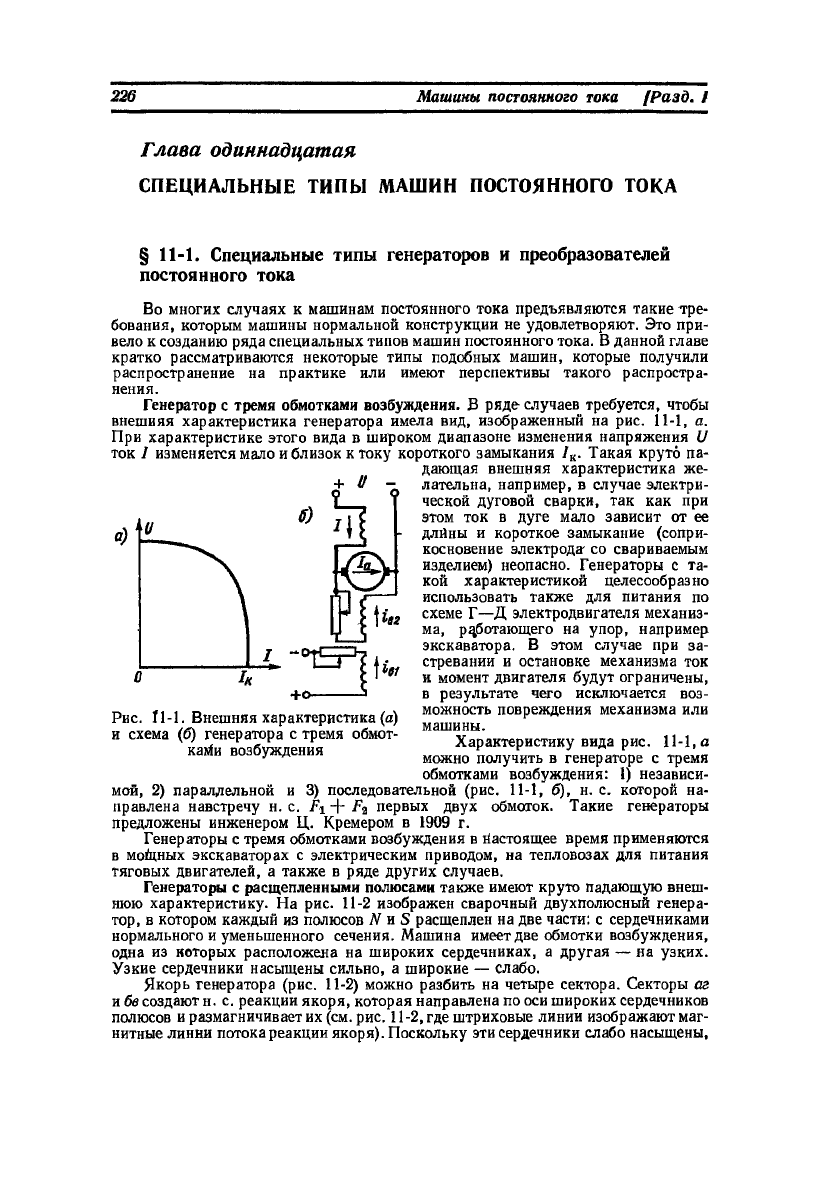
Генераторы с расщепленными полюсами также имеют круто падающую внеш-
нюю характеристику. На рис. 11-2 изображен сварочный двухполюсный генера-
тор, в котором каждый из полюсов N и S расщеплен на две части: с сердечниками
нормального и уменьшенного сечения. Машина имеет две обмотки возбуждения,
одна из которых расположена на широких сердечниках, а другая — на узких.
Узкие сердечники насыщены сильно, а широкие — слабо.
Якорь генератора (рис. 11-2) можно разбить на четыре сектора. Секторы аг
и бе создают н. с. реакции якоря, которая направлена по оси широких сердечников
полюсов и размагничивает их (см. рис. 11-2, где штриховые линии изображают маг-
нитные линии потока реакции якоря). Поскольку эти сердечники слабо насыщены.
Рис. 11-1. Внешняя характеристика (а)
и схема (б) генератора с тремя обмот-
ками возбуждения
то их поток с увеличением /„ значительно уменьшается, а при больших значениях
/ даже изменяет направление. Секторы аб и гв создают н. с. реакции якоря, кото-
рая направлена по осн узких сердечников и намагничивает нх. Однако вследствие
сильного насыщения этих сердечников поток в них остается практически постоян-
ным В результате суммарный поток сердечников полюсов N — N и сердечников
полюсов S — S с увеличением /„ быстро уменьшается, вместе с тем резко падает
также напряжение машины U, снимаемое с главных щеток а ив.
Напряжение между главной щеткой в и вспомогательной, или «третьей»,
щеткой б остается практически постоянным, так как индуктируется потоком
узЛх полюсных сердечников, и используется для питания обмоток возбуждения.
Ток обмоток широких сердечников ре-
гулируется сопротивлением R
B
, и при
разных положениях реостата полу-
чаются внешние характеристики, по-
казанные на рис. 11-3.
В СССР с расщепленными полю-
сами изготовляются сварочные гене-
раторы ПС с U
a
= 35 в (напряжение
холостого хода до 80 в) и до 500 а.
Генераторы имеют также добавочные
полюсы, расположенные между сердеч-
никами главных полюсов N и S.
Генераторы поперечного поля
впервые были предложены немецким
инженером Э. Розенбергом (1904 г.).
В настоящее время оии применяются
главным образом для питания элек-
трооборудования пассажирских ваго-
нов железных дорог и работают па-
раллельно с аккумуляторной бата-
реей Эти генераторы приводятся
в движение от оси вагона и в ши-
роком диапазоне изменения п дают
U — const.
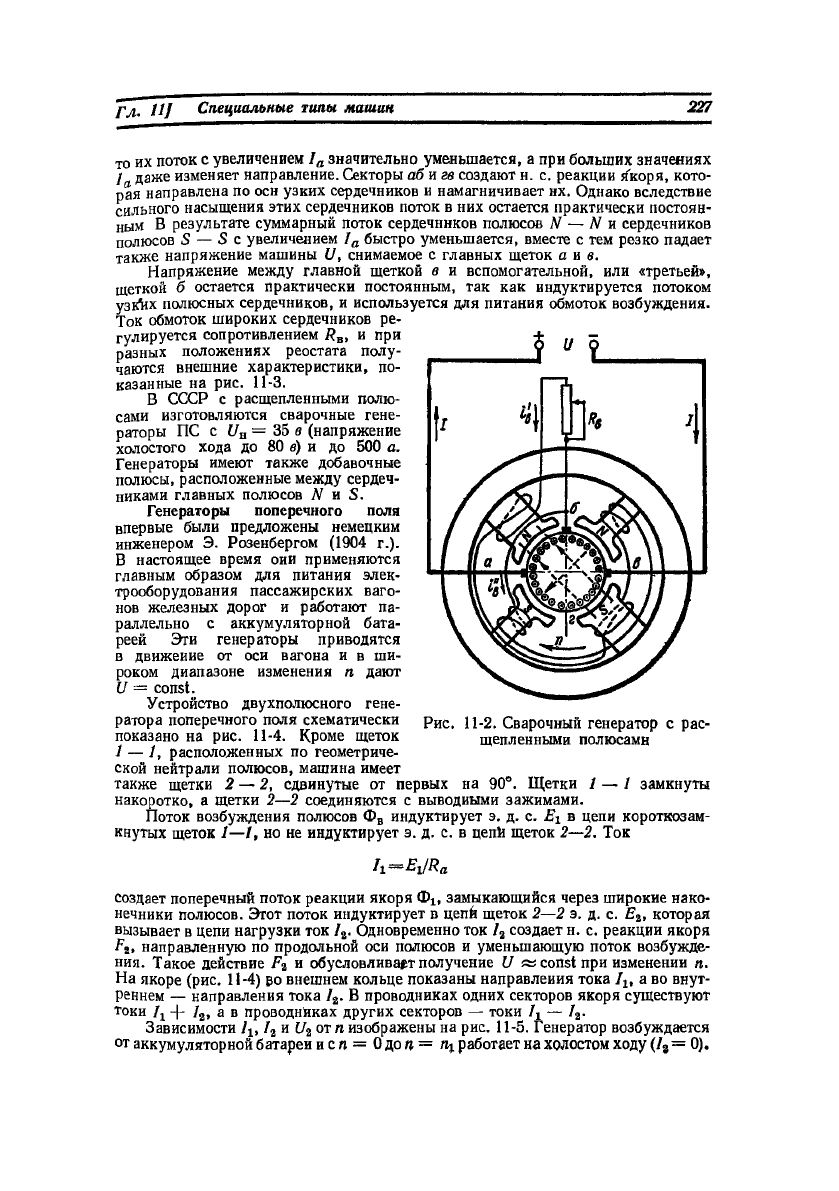
Устройство двухполюсного гене-
ратора поперечного поля схематически
показано на рис. 11-4. Кроме щеток
1 — 1, расположенных по геометриче-
ской нейтрали полюсов, машина имеет
также щетки 2 — 2, сдвинутые от первых на 90°. Щетки 1 — 1 замкнуты
накоротко, а щетки 2—2 соединяются с выводными зажимами.
Поток возбуждения полюсов Ф
в
индуктирует э. д. с. в цепи короткозам-
кнутых щеток 1—1, но не индуктирует э. д. с. в цепй щеток 2—2. Ток
h^EJRa
создает поперечный поток реакции якоря Ф^ замыкающийся через широкие нако-
нечники полюсов. Этот поток индуктирует в цепй щеток 2—2 э. д. с. Е
2
, которая
вызывает в цепи нагрузки ток /
3
. Одновременно ток /
3
создает н. с. реакции якоря
fj, направленную по продольной оси полюсов и уменьшающую поток возбужде-
ния. Такое действие F
t
и обусловливает получение U ss const при изменении п.
На якоре (рис. 11-4) во внешнем кольце показаны направления тока I
lt
а во внут-
реннем — направления тока /
2
. В проводниках одних секторов якоря существуют
токи /
2
, а в проводниках других секторов — токи 1
1
— /
2
.
Зависимости 1
и
/
2
и Щ от л изображены на рис. 11-5. Генератор возбуждается
от аккумуляторной батареи и с п= 0 до
/}
= работает на холостом ходу
{1
%
= 0),
! " I
Рис. 11-2. Сварочный генератор с рас-
щепленными полюсами
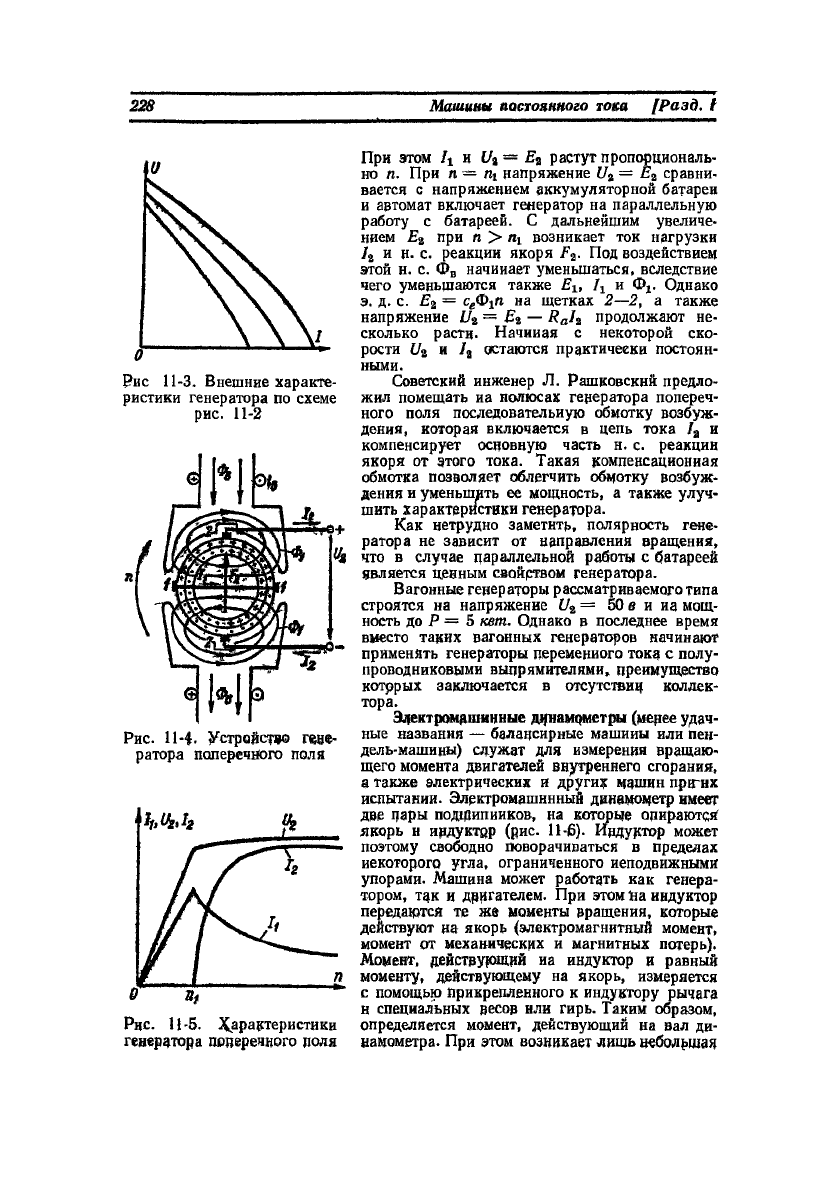
Рис 11-3. Внешние характе-
ристики генератора по схеме
рис. 11-2
Рис. 11-4- Устройство гене-
ратора поперечного поля
Рис. 11-5. Характеристики
генератора поперечного поля
При этом li и l/j = Яа растут пропорциональ-
но п. При n—ni напряжение и
г
= Ё
2
сравни-
вается с напряжением аккумуляторной батареи
и автомат включает генератор на параллельную
работу с батареей. С дальнейшим увеличе-
нием при п > Hi возникает ток нагрузки
/
3
и н. с. реакции якоря Под воздействием
этой н. с. Ф
в
начинает уменьшаться, вследствие
чего уменьшаются также Еу, 1
1
и ®j. Однако
э. д. с. £
2
' с
е
Ф
г
п на щетках 2—2, а также
напряжение i/
2
= Ег — R
a
h продолжают не-
сколько расти. Начиная с некоторой ско-
рости 1/
2
и /
а
остаются практически постоян-
ными.
Советский инженер Л. Рашковскнй предло-
жил помещать иа полюсах генератора попереч-
ного поля последовательную сюмотку возбуж-
дения, которая включается в цепь тока /
а
и
компенсирует основную часть н. с. реакции
якоря от этого тока. Такая компенсационная
обмотка позволяет облегчить обмотку возбуж-
дения и уменьшить ее мощность, а также улуч-
шить характеристики генератора.
Как нетрудно заметить, полярность гене-
ратора не зависит от направления вращения,
что в случае параллельной работы с батареей
является ценным свойством генератора.
Вагонные генераторы рассматриваемого типа
строятся на напряжение И
г
= 50 в и иа мощ-
ность до Р = 5 кет. Однако в последнее время
вместо таких вагонных генераторов начинают
применять генераторы переменного тока с полу-
проводниковыми выпрямителями, преимущество
котррых заключается в отсутствие коллек-
тора.
Эдектромдшинные динамометры (мерее удач-
ные названия — балансирные машииы или пен-
дель-машины) служат для измерения вращаю-
щего момента двигателей внутреннего сгорания,
а также электрических и других цашин пргнх
испытании. Элрктромашнннын динамометр имеет
две цары подшипников, на которые опираются
якорь н индуктйр (рис. 11-6). Индуктор может
поэтому свободно поворачиваться в пределах
некоторого угла, ограниченного неподвижными
упорами. Машина может работать как генера-
тором, так и дригателем. При этом ha индуктор
передается те же моменты вращения, которые
действуют на якорь (электромагнитный момент,
момент от механических и магнитных потерь).
Момент, действующий иа индуктор и равный
моменту, действующему на якорь, измеряется
с помощью прикрепленного к индуктору рычага
н специальных весов нли гирь. Таким образом,
определяется момент, действующий на вал ди-
намометра. При этом возникает лишь н-ебольшая
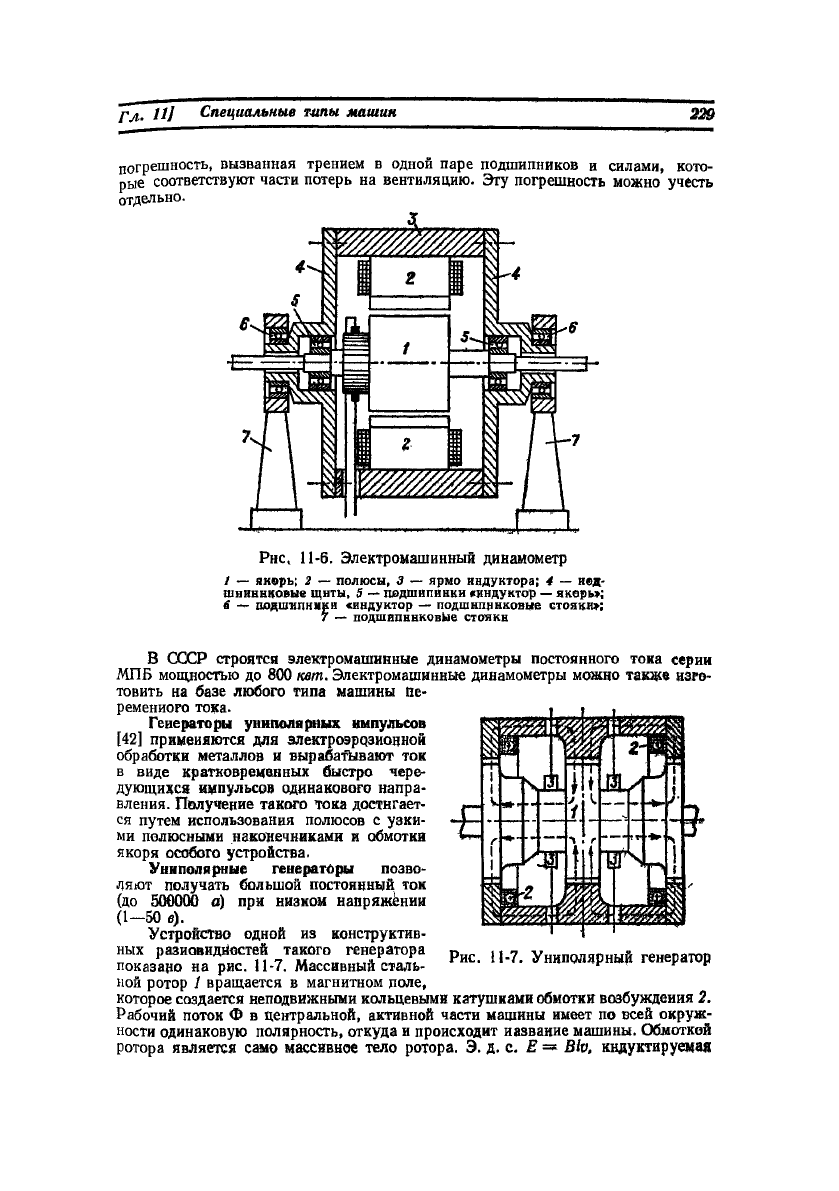
погрешность, вызванная трением в одной паре подшипников и силами, кото-
рые соответствуют части потерь на вентиляцию. Эту погрешность можно учесть
отдельно.
Рнс, 11-6. Электромашинный динамометр
/ — якорь; 2 — полюсы, 3 — ярмо индуктора; 4 — иод-
шниннковые щнты, 5 — подшипники «индуктор — якорь»;
6 — подшипники «индуктор — подшипниковые стояки»;
7 — подшипниковое стояки
В СССР строятся электромашииные динамометры постоянного тока серии
МПБ мощностью до 800 квт. Электромашинные динамометры можно также изго-
товить на базе любого типа машины Пе-
ременного тока.
Генераторы униполярных импульсов
[42] применяются для злектроэрцзионной
обработки металлов и вырабатывают ток
в виде кратковременных быстро чере-
дующиеся импульсов одинакового напра-
вления. Получение такого тока достигает-
ся путем использования полюсов с узки-
ми полюсными наконечниками и обмотки
якоря особого устройства.
Униполярные генераторы позво-
ляют получать большой постоянный ток
(до 500000 а) при низком напряжении
(1—50 в).
Устройство одной из конструктив-
ных разновидностей такого генератора
показано на рис. 11-7. Массивный сталь-
ной ротор 1 вращается в магнитном поле,
которое создается неподвижными кольцевыми катушками обмотки возбуждения 2.
Рабочий поток Ф в центральной, активной части машины имеет по всей окруж-
ности одинаковую полярность, откуда и происходит название машины. Обмоткой
ротора является само массивное тело ротора. Э. д. с. £ =* Blv, индуктируемая
Рис. 11-7. Униполярный генератор
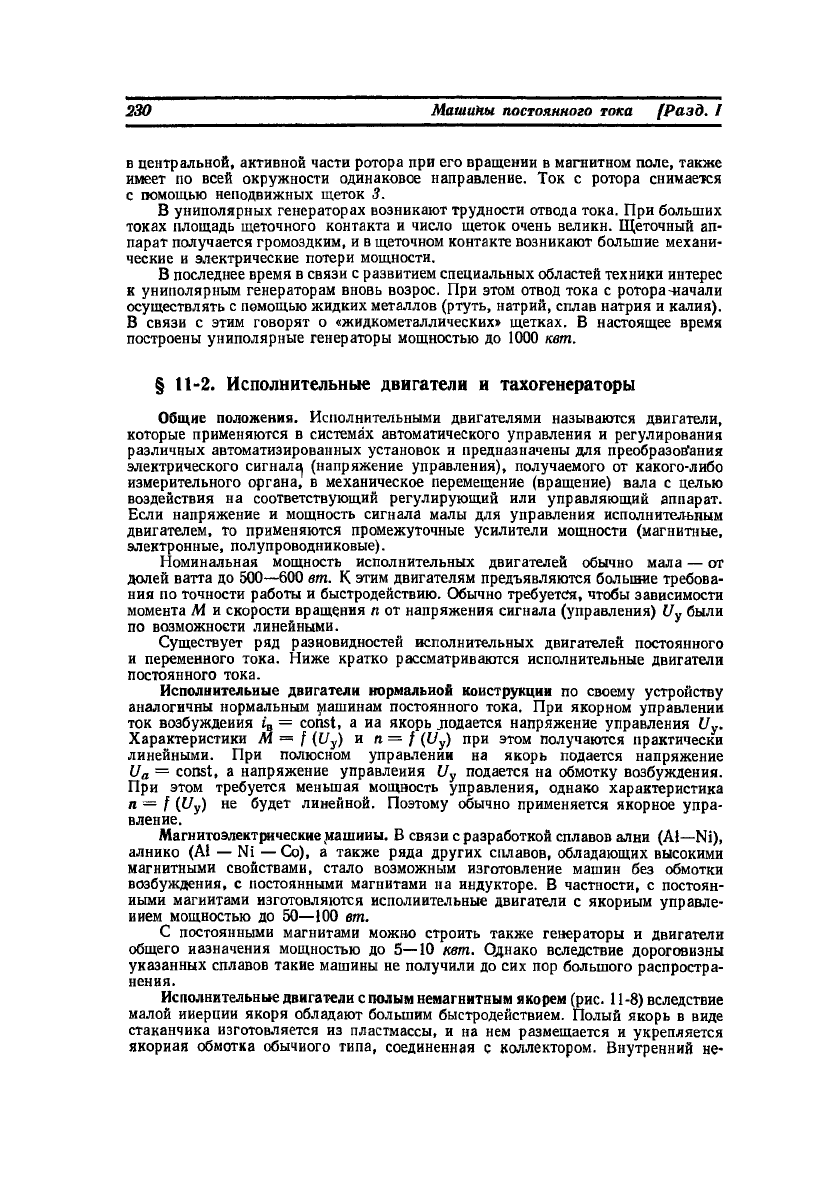
в центральной, активной части ротора при его вращении в магнитном поле, также
имеет по всей окружности одинаковое направление. Ток с ротора снимается
с помощью неподвижных щеток 3.
В униполярных генераторах возникают трудности отвода тока. При больших
токах площадь щеточного контакта и число щеток очень велики. Щеточный ап-
парат получается громоздким, и в щеточном контакте возникают большие механи-
ческие и электрические потери мощности.
В последнее время в связи с развитием специальных областей техники интерес
к униполярным генераторам вновь возрос. При этом отвод тока с ротора-начали
осуществлять с помощью жидких металлов (ртуть, натрий, сплав натрия и калия).
В связи с этим говорят о «жидкометаллических» щетках. В настоящее время
построены униполярные генераторы мощностью до 1000 кет.
§ 11-2. Исполнительные двигатели и тахогенераторы
Общие положения. Исполнительными двигателями называются двигатели,
которые применяются в системах автоматического управления и регулирования
различных автоматизированных установок и предназначены для преобразования
электрического сигналу (напряжение управления), получаемого от какого-либо
измерительного органа, в механическое перемещение (вращение) вала с целью
воздействия на соответствующий регулирующий или управляющий аппарат.
Если напряжение и мощность сигнала малы для управления исполнительным
двигателем, то применяются промежуточные усилители мощности (магнитные,
электронные, полупроводниковые).
Номинальная мощность исполнительных двигателей обычно мала — от
долей ватта до 500—600 вт. К этим двигателям предъявляются большие требова-
ния по точности работы и быстродействию. Обычно требуется, чтобы зависимости
момента М и скорости вращения п от напряжения сигнала (управления) Uy были
по возможности линейными.
Существует ряд разновидностей исполнительных двигателей постоянного
и переменного тока. Ниже кратко рассматриваются исполнительные двигатели
постоянного тока.
Исполнительные двигатели нормальной конструкции по своему устройству
аналогичны нормальным машинам постоянного тока. При якорном управлении
ток возбуждения £
в
= const, а иа якорь .подается напряжение управления Uy.
Характеристики М = f (U
y
) и п= f (U
y
) при этом получаются практически
линейными. При полюсном управлении на якорь подается напряжение
U
a
= const, а напряжение управления U
y
подается на обмотку возбуждения.
При этом требуется меньшая мощность управления, однако характеристика
n—f (U
y
) не будет линейной. Поэтому обычно применяется якорное упра-
вление.
Магнитоэлектрические машины. В связи с разработкой сплавов ални (At—Ni),
алнико (At — Ni — Со), а также ряда других сплавов, обладающих высокими
магнитными свойствами, стало возможным изготовление машин без обмотки
возбуждения, с постоянными магнитами на индукторе. В частности, с постоян-
ными магнитами изготовляются исполнительные двигатели с якорным управле-
нием мощностью до 50—100 вт.
С постоянными магнитами можно строить также генераторы и двигатели
общего назначения мощностью до 5—10 кет. Однако вследствие дороговизны
указанных сплавов такие машины не получили до сих пор большого распростра-
нения.
Исполнительные двигатели с полым немагнитным якорем (рис.
11 -8)
вследствие
малой инерции якоря обладают большим быстродействием. Полый якорь в виде
стаканчика изготовляется из пластмассы, и на нем размещается и укрепляется
якорная обмотка обычного типа, соединенная с коллектором. Внутренний не-