Вахламов В.К., Шатров М.Г., Юрчевский А.А. Автомобили: Теория и конструкция автомобиля и двигателя
Подождите немного. Документ загружается.

26.2. Занос переднего и заднего мостов
Поперечная устойчивость автомобиля рассматривалась в пред-
положении, что колеса обоих мостов начинают скользить в попе-
речном направлении одновременно. Обычно же начинают сколь-
зить колеса одного моста, вследствие чего приходится рассматри-
вать устойчивость не всего автомобиля в целом, а одного из его
мостов.
Согласно формуле
(21.7},
качение колеса без скольжения воз-
можно при условии
R
y
<
7^
2
Ф
2
-
R
2
X
.
Поперечная сила, которую
можно приложить к колесу, не вызывая его скольжения, тем боль-
ше, чем больше сила сцепления и чем меньше касательная реак-
ция дороги. Наиболее устойчиво в поперечном направлении ведо-
мое колесо, у которого касательная реакция
Р
у
в сравнении с
силой невелика. Колесо, нагруженное силой тяги или тормозной
силой, хуже противостоит заносу, чем ведомое колесо. Если каса-
тельная реакция достигла значения силы сцепления, то для того,
чтобы произошло боковое скольжение, достаточно приложить к
колесу даже небольшую поперечную силу.
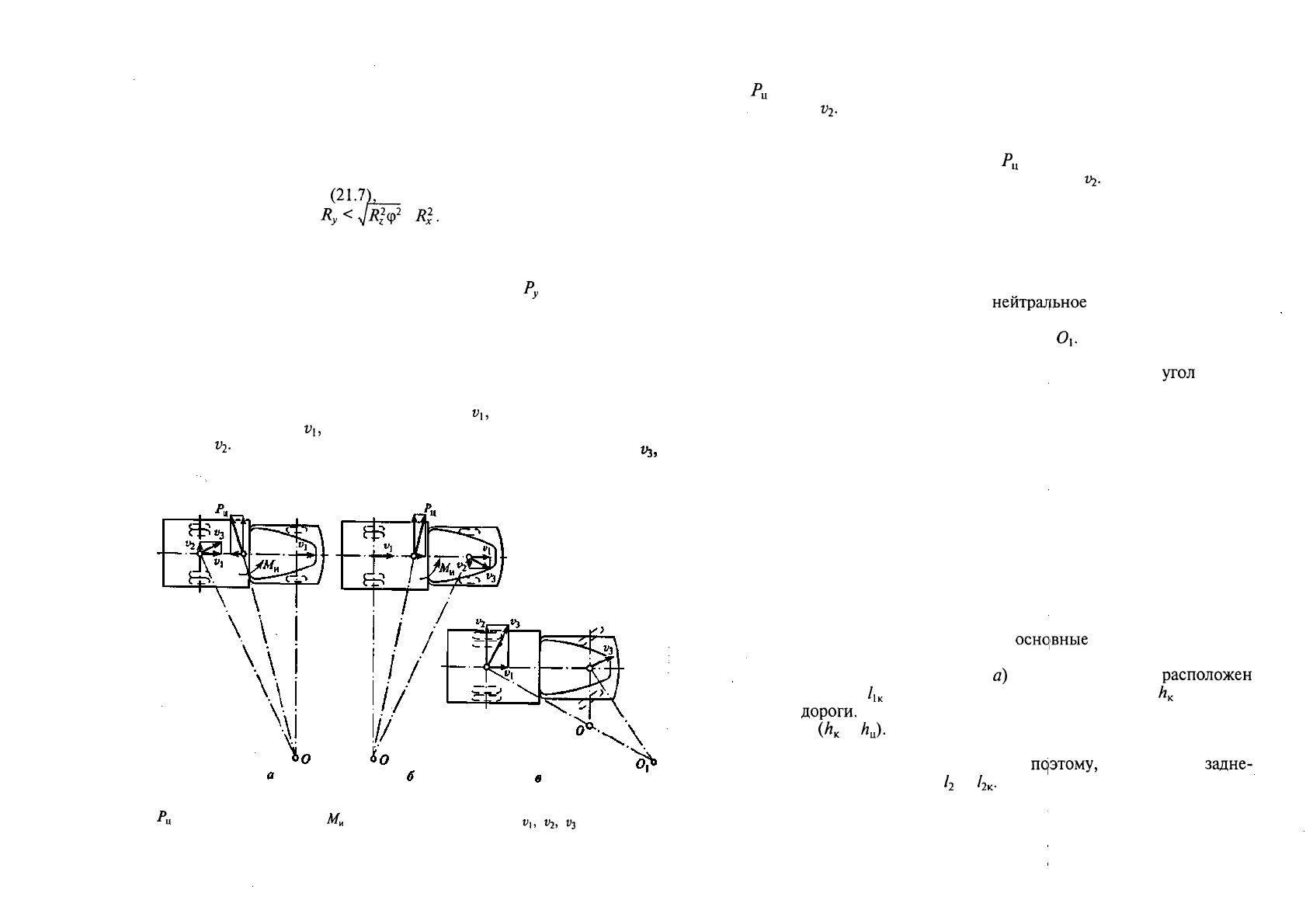
На рис. 26.3, а показан автомобиль, у которого передние коле-
са движутся поступательно со скоростью
и,,
а задние колеса, дви-
гаясь со скоростью
v
l
,
скользят в поперечном направлении со ско-
ростью
v
2
.
В результате задний мост перемещается со скоростью
г»з,
что вызывает поворот автомобиля вокруг центра О, хотя перед-
Рис. 26.3. Занос заднего (а), переднего (б) мостов и гашение заноса (в):
Р
ц
— центробежная сила;
Л/
и
— инерционный момент;
v,,
t>
2
,
v
3
— скорости
поступательного движения, скольжения в поперечном направлении и поворота
вокруг центра О задних колес
340
ние колеса при этом находятся в нейтральном положении. Попе-
речная составляющая возникающей при этом центробежной силы
Р
и
действует в направлении скольжения заднего моста, повышая
скорость
v
2
.
Это вызывает дальнейшее возрастание центробежной
силы, в результате чего занос прогрессирует. Поэтому опаснее за-
нос заднего, а не переднего моста (рис. 26.3, б), при котором
поперечная составляющая силы
Р
ц
направлена в сторону, проти-
воположную скорости бокового скольжения
щ.
В результате сколь-
жение передних колес автоматически прекращается, и автомо-
биль не теряет устойчивости.
Для того чтобы устранить занос заднего моста, необходимо
уменьшить касательную реакцию на ведущих колесах, прекратив
торможение или прикрыв дроссельную заслонку, и повернуть пе-
редние колеса в сторону начавшегося заноса. Если во время зано-
са передние колеса занимали
нейтральное
положение, а центр
поворота находился в точке О (рис. 26.3, в), то после поворота
передних колес он сместится в точку
0\.
Радиус поворота при
этом увеличится, что уменьшит центробежную силу.
Поворот передних колес на чрезмерно большой
угол
может
вызвать скольжение задних колес в обратную сторону и движение
автомобиля в направлении, соответствующем новому положению
управляемых колес. Поэтому сразу же после прекращения заноса
их следует вернуть в нейтральное положение.
Чтобы избежать потери автомобилем устойчивости, необходи-
мо плавно уменьшить скорость до начала поворота, особенно на
влажной и скользкой дороге.
26.3. Влияние конструктивных и эксплуатационных
факторов на поперечную устойчивость
При определении показателей устойчивости было принято, что
автомобиль — твердое тело. В действительности же он представля-
ет собой систему масс, соединенных шарнирами или упругими
элементами. Можно выделить две
основные
группы масс: подрес-
соренные (кузов) и неподрессоренные (колеса, мосты).
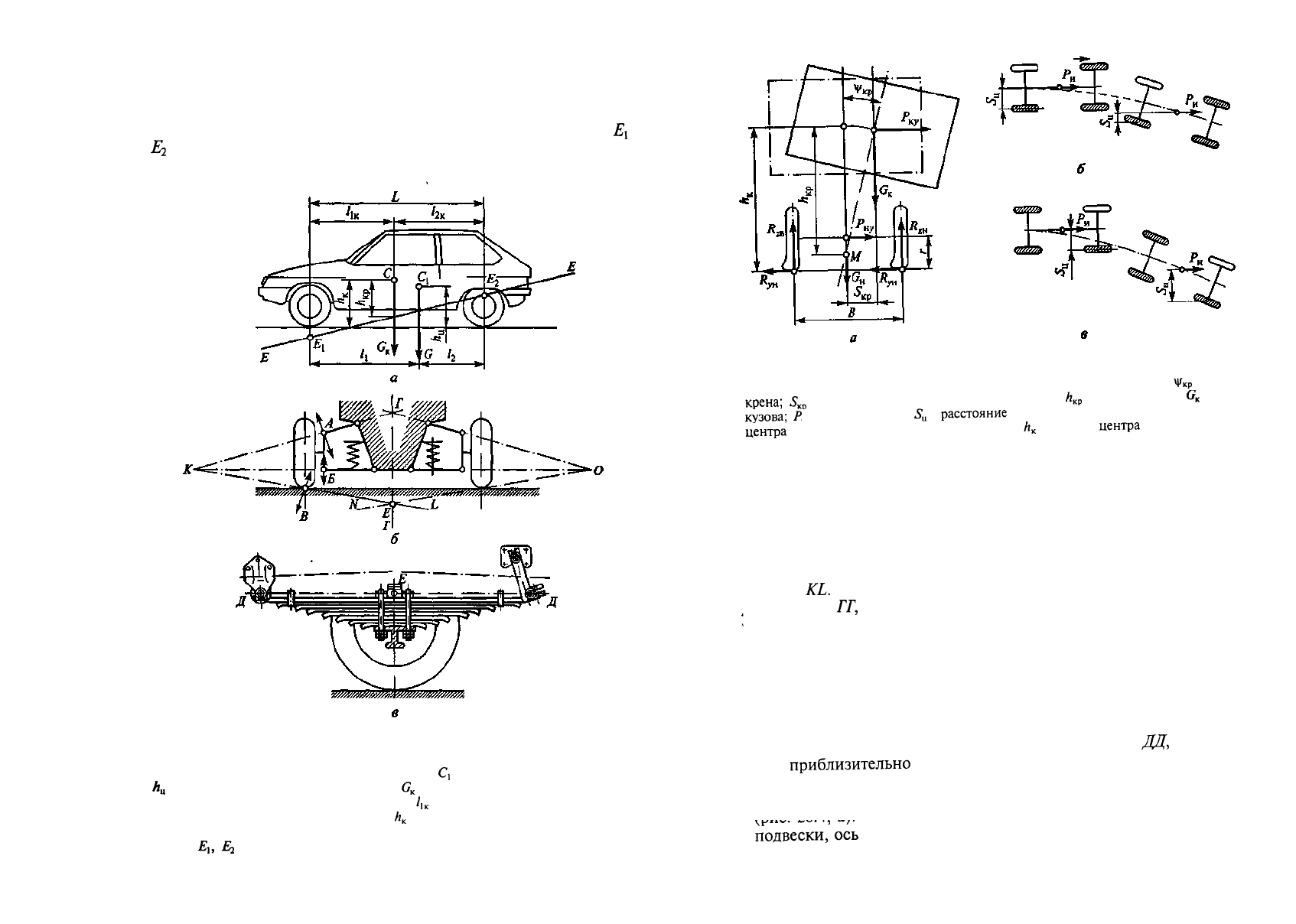
Центр тяжести С (рис. 26.4,
а}
подрессоренных масс
расположен
на расстоянии
/
1к
от оси переднего колеса и на высоте
Н
к
от поверх-
ности
дороги.
Точка С расположена выше центра тяжести С\ авто-
мобиля
(Н
к
>
Н
ц
).
Неподрессоренные массы ведомого моста обычно меньше непод-
рессоренных масс ведущего моста,
поэтому,
например, у
задне-
приводного автомобиля
/
2
<
/2
К
-
Под действием поперечной силы шины и упругие элементы
подвески с одной стороны автомобиля разгружаются, а с дру-
гой — нагружаются. В результате кузов автомобиля наклоняется и
поворачивается в поперечном направлении.
341
Центром крена (передним или задним) называют точку, отно-
сительно которой перемещается поперечное сечение автомобиля,
проходящее через передний или задний мост.
Осью крена называют прямую, относительно которой повора-
чивается кузов при крене. Она проходит через центры крена
Е\
и
Е
2
соответственно передней и задней частей кузова.
Рис. 26.4. Расположение центров и оси крена:
а — ось крена; б, в — центры крена при рычажной независимой и рессорной
зависимой подвесках; G — вес автомобиля;
С\
— центр тяжести автомобиля;
Л
ц
— высота центра тяжести автомобиля;
G
K
— сила тяжести подрессоренных масс;
С — центр тяжести подрессоренных масс;
/,
к
— расстояние центра тяжести под-
рессоренных масс от переднего колеса;
Л
к
— высота от поверхности дороги поло-
жения центра тяжести подрессоренных масс; L — база автомобиля; ЕЕ — ось
крена;
Е\,
Б^
— центры крена соответственно передней и задней частей кузова
342
Рис. 26.5. Определение поперечной устойчивости автомобиля:
а - угла крена на повороте; б, в — устойчивости при торможении;
ч/
кр
- угол
крена-
S
KD
- поперечное смещение центра тяжести;
Л
кр
- плечо крена;
С
к
- вес
кузова-
Р
- сила инерции;
S
u
-
расстояние
по горизонтали от центра тяжести до
центра
площадки контакта колеса с дорогой;
Л
к
- высота
центра
тяжести кузова
Найдем положение центра крена автомобиля с рычажной под-
веской (рис. 26.4, б). При неподвижном кузове вертикальные ко-
лебания левого колеса вызывают перемещение точек А и Б в на-
правлениях, перпендикулярных к рычагам. Мгновенный центр
скоростей колеса расположен в точке К, точка В перемещается
при этом перпендикулярно линии KL. Если колесо не перемеща-
ется, а наклоняется кузов, то центр его крена также находится на
линии
KL.
Подвеска симметрична относительно вертикальной
плоскости
/Т,
следовательно, центр Е крена находится в этой
:
плоскости. В рассматриваемом случае он расположен ниже поверх-
ности дороги.
Подвеску с параллельным перемещением колес можно рас-
сматривать как рычажную, имеющую бесконечно длинные ры-
чаги. Центр крена при такой подвеске находится на поверхности
дороги.
У автомобиля с подвеской на продольных листовых рессорах
(рис. 26.4, в) центр Е крена находится в плоскости
ДД,
проходя-
щей
приблизительно
через середину высоты верхнего коренного
листа рессоры. У легкового автомобиля с передней независимой и
задней зависимой подвесками ось крена ЕЕ наклонена к дороге
(рис. 26.4, а). У грузового автомобиля, имеющего обе зависимые
подвески,'ось
крена ЕЕ расположена приблизительно параллель-
но дороге.
343
Поперечная сила
Р
ку
(рис. 26.5,
а),
приложенная к центру тя-
жести кузова, создает на плече
Л
кр
крена момент
Л/,
вызываю-
щий поперечный наклон кузова. Определим угол крена
\|/
кр
при
повороте автомобиля на горизонтальной дороге. К центру тяже-
сти подрессоренных масс приложены сила тяжести
G
K
и сила
Р
ку
.
Точки приложения силы
G
H
тяжести и
центробежной
силы не-
подрессоренных масс расположены на высоте, равной прибли-
зительно
г.
На колеса внутренней стороны автомобиля действуют реакции
дороги
R
ZB
и
R
yB
,
а на колеса внешней стороны — реакции
R^
и
КУН.
Под действием силы
Р
ну
кузов автомобиля поворачивается
относительно
оси
крена
на
угол
\j/
Kp
,
который обычно
не
превы-
шает 8... 10°, поэтому можно считать
Н
к
~
const. При малых углах
поперечное смещение центра тяжести
tg
У
(26.9)
Моменты сил
Р
ку
и
G
K
уравновешивают момент упругих сил:
ЛЛ
Р
+
G
A
P
=
СуаУкр,
(26.10)
где Су
а
— угловая жесткость подвески автомобиля, равная отно-
шению момента, вызывающего крен, к углу крена
\|/
кр
,
Н •
м/рад.
Из выражений (26.9) и (26.10) угол крена, рад,
Для уменьшения крена устанавливают стабилизатор попереч-
ной устойчивости, повышая тем самым угловую жесткость под-
вески.
При крене кузова увеличивается вероятность опрокидывания
автомобиля. Если при определении скорости
v
0
и
угла
(3
0
учесть
также и угол крена кузова, то их значения окажутся на 10... 15 %
меньше, чем при расчете по формулам (26.5) и (26,7).
Автомобиль может потерять устойчивость при торможении в
результате неравномерного распределения тормозных сил между
колесами. Если заторможено лишь одно заднее колесо, напри-
мер, правое (на рис. 26.5, б заштриховано), а другое (левое) ка-
тится свободно, то автомобиль отклоняется вправо от прямоли-
нейного движения. Расстояние
5
Ц
при этом уменьшается, следо-
вательно, понижается также поворачивающий момент, создава-
емый силой
Р
н
.
При неисправности одного из передних тормозных механиз-
мов (рис. 26.5, в) плечо момента
$
ц
во время торможения возрас-
тает, что способствует дальнейшему отклонению автомобиля в
сторону. Поэтому неисправность передних тормозных механизмов
опаснее, чем задних.
344
26.4. Продольная устойчивость
У современных автомобилей с низко расположенным центром
тяжести опрокидывание в продольной плоскости маловероятно и
практически исключено. Возможно лишь буксование ведущих ко-
лес, вызывающее сползание автомобиля, например, во время
динамического преодоления автопоездом крутого подъема боль-
шой длины.
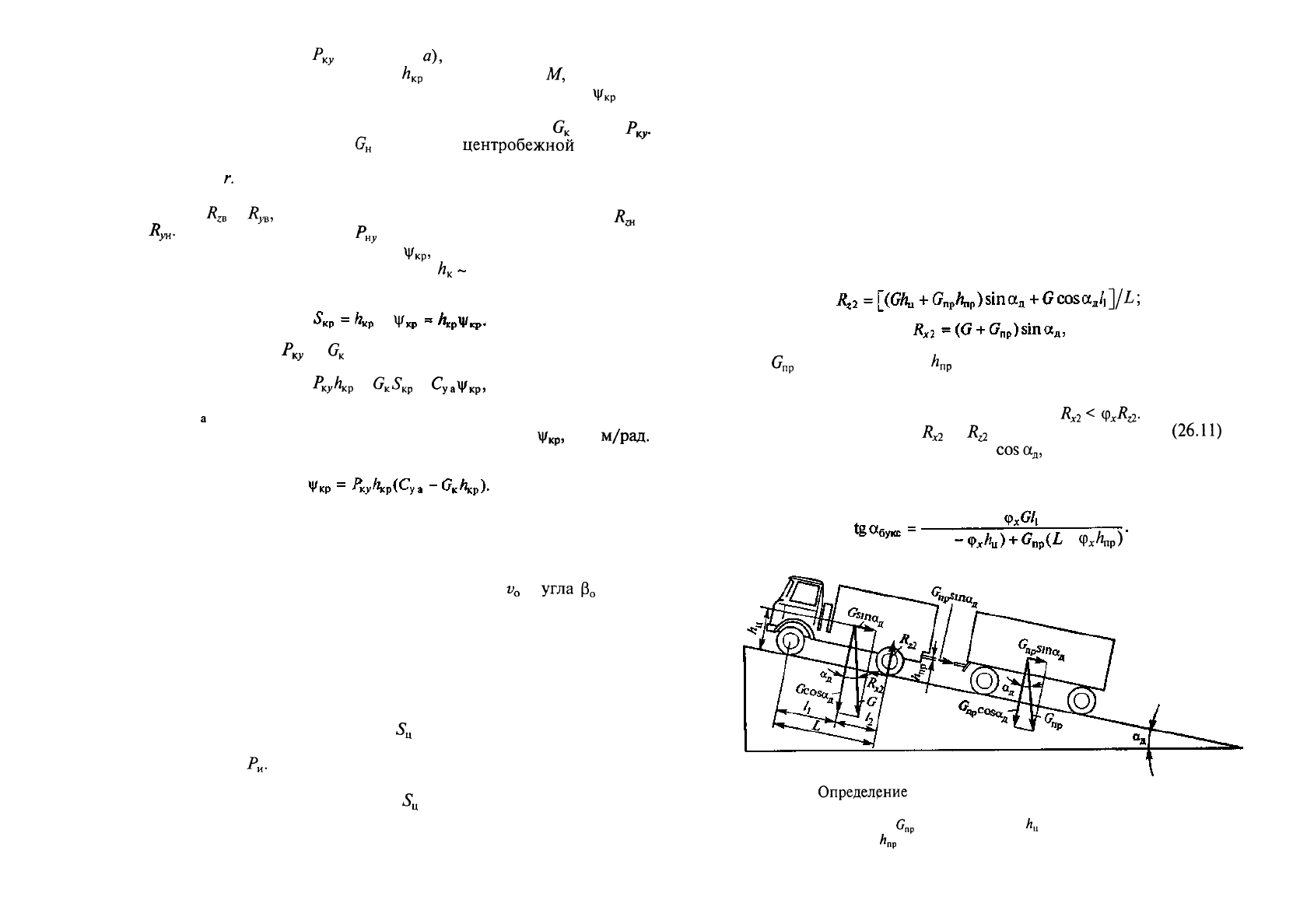
Определим максимальный угол подъема, который при равно-
мерном движении может преодолеть автопоезд без буксования
ведущих колес тягача. Примем, что силы сопротивления качению
и воздуха отсутствуют (рис. 26.6). Из условий равновесия тягача
имеем:
]/L;
(26.11)
(26.12)
где
С/пр
— вес прицепа;
Л
пр
— высота расположения буксирного
крюка.
Максимальное значение касательной реакции ограничено ко-
эффициентом сцепления шин с дорогой:
R
x2
<
Ф*/^-
Подставив в
эту формулу значения
R
x2
и
R^
согласно выражениям
(26.11)
и
(26.12) и разделив обе части на
cosa
fl
,
получим выражение для
максимального (критического) угла подъема, при котором возмож-
но движение автопоезда без буксования ведущих колес тягача:
G(L
-
ФА
Р
)
Рис. 26.6
Определение
максимального угла подъема, преодолеваемого
автопоездом:
С? — вес автомобиля;
G
np
— вес прицепа,
Л
ц
— высота расположения центра
тяжести автомобиля;
Л
пр
— высота расположения буксирного крюка, L — база
автомобиля
345
Так как для одиночного автомобиля вес прицепа
G
np
=
0,
то
для него
tga
6
yK
C
='1ф*/(£-фА).
(26.13)
Критический угол подъема во многом зависит от коэффици-
ента сцепления. Для автопоезда при
ф
х
= 0,3 этот угол не превыша-
ет
4...6
Р
,
для одиночного автомобиля с колесной формулой 4x2
он составляет 10... 15°. Этим объясняется часто наблюдаемое в зим-
нее время буксование ведущих колес тягача автопоезда на срав-
нительно пологих подъемах.
Автомобиль со всеми ведущими мостами может преодолевать
крутые подъемы (а = 17... 19°) без потери продольной устойчиво-
сти даж;е на мокрых и скользких дорогах.
Контрольные вопросы
1.
Назовите показатели поперечной устойчивости автомобиля.
2. От каких факторов зависит критическая скорость автомобиля, оп-
ределенная по условиям заноса и опрокидывания?
3.
От
каких факторов зависит максимальный угол косогора, опреде-
ленный по условиям заноса и опрокидывания?
4. Что такое коэффициент поперечной устойчивости автомобиля и
каковы его средние значения для автомобилей различных типов?
5. Занос какого моста опаснее и почему?
6. От чего зависит продольная устойчивость автомобиля?
Глава 27
УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
27.1. Показатели управляемости
Автомобиль должен иметь возможность легко и быстро изме-
нить свое положение на дороге под воздействием водителя.
Управляемость автомобиля оценивают по следующим измери-
телям и показателям: критическая скорость по условиям управля-
емости, поворачиваемость, соотношение углов поворота управ-
ляемых колес, угловые колебания и
стабилизация
управляемых
колес.
Иногда встречается оценка
управляеморти
по времени реак-
ции автомобиля на управляющее воздействие, т.е. по временному
интервалу от начала поворота рулевого колеса до начала поворота
продольной оси автомобиля. Поскольку экспериментальное опре-
деление такого оценочного критерия требует специальной довольно
сложной гироскопической аппаратуры, вместо курсового угла
поворота продольной оси ориентируются на временной интервал
до достижения установившегося бокового ускорения. Строго го-
воря, оценка управляемости должна проводиться с учетом эрго-
номических характеристик рабочего места водителя.
Управляемость и устойчивость — это два эксплуатационных
свойства автомобиля, требования к
которьш
противоречат друг
другу. Идеально устойчивый автомобиль, направление движения
которого никакими силами невозможно изменить, будет неуп-
равляемым. Наоборот, легко управляемый автомобиль, направле-
ние движения которого изменяется любой возмущающей
рилой,
будет неустойчив.
Конструкторам приходится искать компромиссные
решенця
при
создании автомобиля для управления человеком.
27.2. Критическая скорость по условиям управляемости
Рассмотрим движение автомобиля на повороте (см. рис. 26.1).
Управляемые колеса автомобиля повернуты на
угол
0. К передне-
му мосту приложена толкающая сила Р,
составляющая
крторой
P
xl
,
направленная параллельно управляемым колесам, при рав-
номерном движении равна силе сопротивления качению
P
Ki
=
G\f.
Поперечная составляющая силы Р
(27.1)
347
На передний мост действует также центробежная сила перед-
ней части автомобиля, направленная вдоль радиуса
R
{
поворота
середины переднего моста:
где
/И]
— масса автомобиля, приходящаяся на передний мост, кг;
Vi
— скорость движения середины переднего моста, м/с.
Но
v
{
=
vRi/R,
и
R
l
=
Д/cosG
поэтому
=
и
/w,i;
2
tg0
RcosQ
jLcosG
Силы
P
y
i
и
Р
ц1
стремятся вызвать боковое скольжение управля-
емых колес. Чтобы колеса катились без скольжения, необходимо
соблюдение условия
=
Pvl +Pnl
<
(27.2)
Центробежная сила
Р
ц1
пропорциональна квадрату скорости,
поэтому скольжение колес наиболее вероятно при большой ско-
рости автомобиля.
Критической скоростью
v
ynp
no условиям управляемости называ-
ют скорость, с которой автомобиль может двигаться на повороте
без поперечного скольжения управляемых колес. Определим ее из
выражений (27.1) и (27.2):
'упр
=
y(V<P
2
-/
2
/tge
-/jglcose.
(27.3)
Если скорость автомобиля больше скорости
г>
упр
,
то управляе-
мые колеса при повороте проскальзывают в поперечном направ-
лении и поворот колес не изменит направления их движения. Чем
меньше радиус поворота автомобиля, тем меньше должна быть
его скорость.
На дорогах с твердым покрытием коэффициент
q>
обычно во
много раз больше
коэффициента/,
поэтому автомобиль сохраня-
ет управляемость При движении по дороге с неровным обледене-
лым покрытием, а также по песку или снегу значения коэффици-
ентов ф
и/сближаются,
что приводит к снижению критической
скорости.
Если ф
~
f/cosQ,
то подкоренное выражение в формуле (27.3)
равно
нулю,
и автомобиль может поворачивать лишь с весьма малой
скоростью. Если ф
<f/cosQ,
то скорость
у
упр
является мнимой, и
автомобиль становится неуправляемым.
При полном скольжении передних колес, например в резуль-
тате торможения, поперечная реакция дороги возникнуть не мо-
жет, и автомобиль теряет управляемость.
348
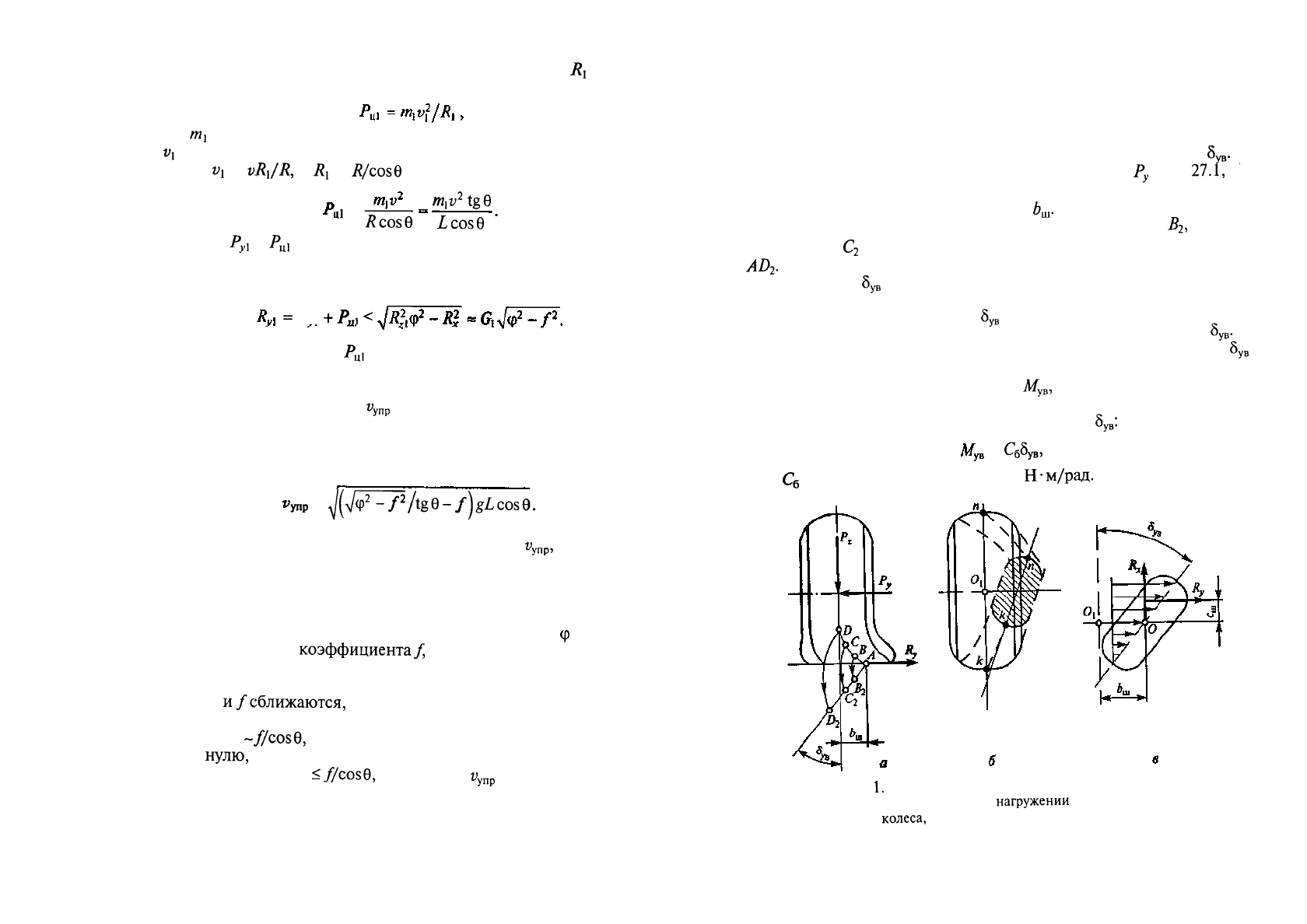
27.3. Увод колеса
Качение эластичного колеса, нагруженного поперечной силой,
имеет особенности, поскольку колесо может катиться без сколь-
жения под некоторым углом к своей средней плоскости. Такое
качение называют уводом колеса, а угол, который вектор скорос-
ти центра колеса образует с его плоскостью, — углом увода
8^.
В случае приложения к колесу поперечной силы
Р
у
(рис.
27.1,
а)
шина изгибается, и средняя плоскость колеса смещается относи-
тельно центра контакта на расстояние
Ь
ш
.
При качении колеса точ-
ка В шины входит в соприкосновение с дорогой в точке
В
2
,
а точка
С — в точке
С
2
и т. д. В результате колесо катится по направлению
AD
2
.
При этом средняя плоскость колеса оказывается расположен-
ной под углом
8
ув
к направлению движения. Средняя линия кон-
такта, приблизительно совпадающая с направлением движения,
также расположена под углом
8
ув
к средней плоскости колеса. Та-
ким образом, колесо катится с уводом, угол которого равен
5
ув
.
Поворот зоны контакта относительно диска колеса на угол
8
ув
вызывает закручивание шины. Вследствие этого со стороны шины
на диск колеса действует момент
М
ув
,
стремящийся повернуть
колесо в сторону, противоположную направлению увода. Момент
при небольших углах увода пропорционален
8
ув
:
=
С
б
8
ув
,
где
С
б
— угловая жесткость шины,
Н-м/рад.
Рис 27
1.
Увод колеса при боковой деформации шины
а — боковая деформация шины при
нагружении
ее силой, перпендикулярной
плоскости качения
колеса,
б — смещение зоны контакта шины с опорной по-
верхностью, в — форма эпюры поперечных реакций в зоне контакта шины с
опорной поверхностью
349
Во время увода колеса в передней части контакта элементы
шины, менее деформированные в поперечном направлении (уча-
сток kk на рис.
27.1,
б),
чем в задней (участок
пп).
Поэтому при
малых силах
Р
у
элементарные поперечные реакции в передней части
контакта меньше, чем в задней, и эпюра элементарных попереч-
ных реакций имеет форму, близкую к треугольной (рис.
27.1,
в).
Равнодействующая
R
y
,
равная по силе
Р
у
,
смещена относи-
тельно центра контакта на расстояние
с
ш
;
смещена также на рас-
стояние
Ь
ш
и касательная реакция
R
x
.
В результате увода проекция
центра колеса на плоскость дороги (точка
О\)
не совпадает с цен-
тром контакта О, а силы
R
x
и
R
y
создают моменты, стремящиеся
повернуть колесо вокруг шкворня.
Увод может быть вызван также установкой управляемых колес
под углом к направлению движения (схождением) и с наклоном
к вертикали (развалом).
При малых значениях силы
Р
у
эпюра поперечных сил близка к
треугольной, и колесо изменяет направление движения главным
образом вследствие упругих деформаций шины (рис. 27.2, а). Рост
силы Ру вызывает вначале лишь увеличение площади эпюры
(рис. 27.2,
6}
без изменения ее формы. При дальнейшем увеличе-
нии силы Ру элементарные поперечные силы, достигнув предель-
ного по условиям сцепления значения, остаются постоянными, и
эпюра приобретает форму трапеции (рис. 27.2, в). Когда сила
Р
у
достигает значения силы сцепления
Р
сц
,
все пятно
контакта
сме-
щается в поперечном направлении (рис. 27.2,
г),
после чего реак-
ция
R
y
остается равной
/?
г
ф
я
а увод колеса сопровождается одно-
временным проскальзыванием шины относительно дороги.
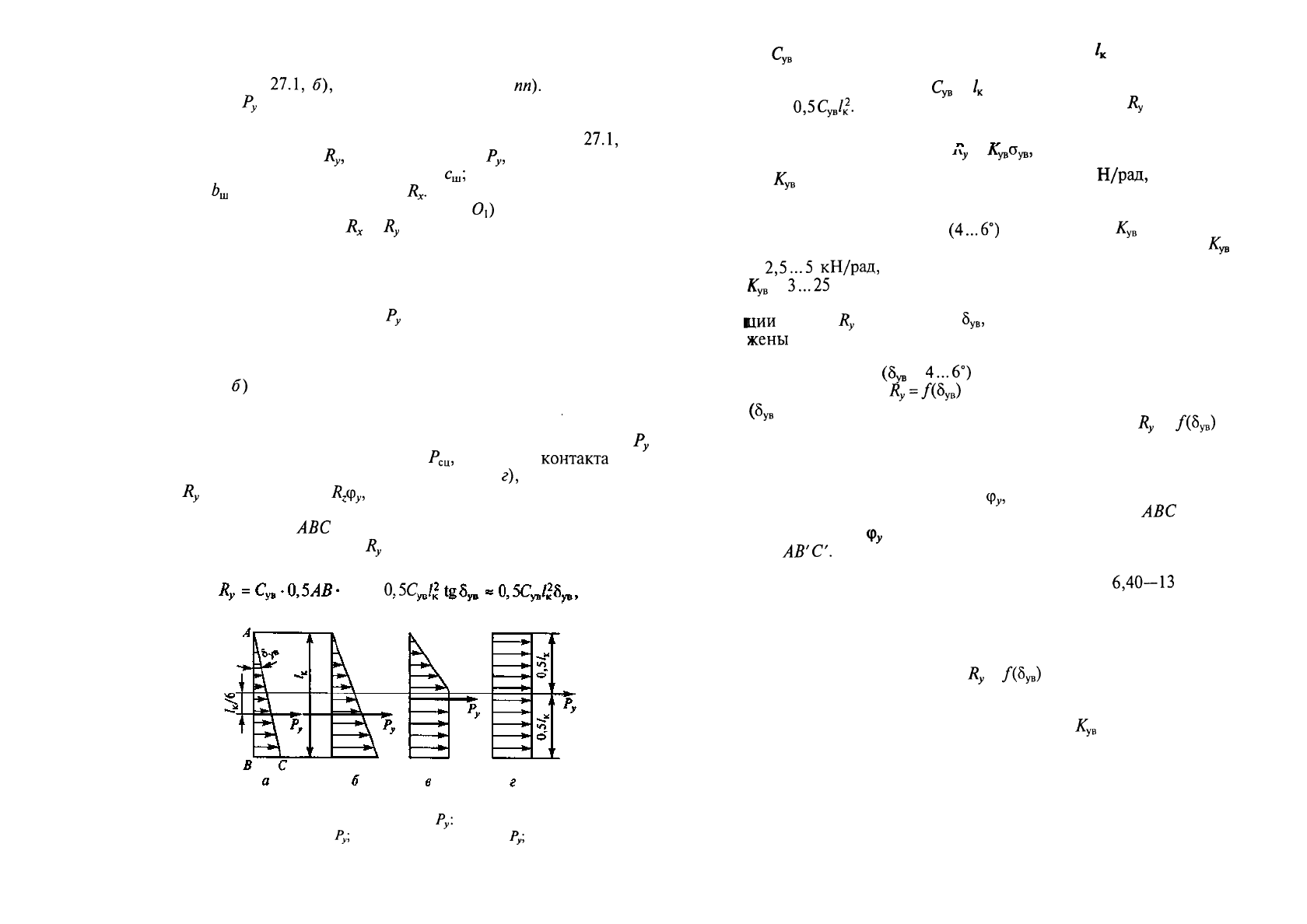
Площадь эпюры
ЛВС
(см. рис. 27.2, а) в масштабе представляет
собой поперечную реакцию
R
y
дороги. При малых значениях по-
перечной силы
•
ВС =
OSC
Рис. 27.2. Эпюры элементарных поперечных реакций при различных зна-
чениях силы
Р
у
:
а — при малых значениях силы
Р
у
\
б — при увеличении силы
Р
у
;
в — при достижении
предельных по сцеплению боковых сил; г — при полном боковом скольжении шины
350
тде
Сув
— коэффициент пропорциональности;
/
к
— длина контак-
та шины с дорогой.
Поскольку величины
С
ув
и
/
к
постоянны, то постоянно и выра-
жение
0,5С
ув
/
к
2
.
Вследствие этого зависимость между
R
y
и углом Сту„
можно выразить как
Л\у
ЛудОуц,
где
К
ув
— коэффициент сопротивления уводу,
Н/рад,
показываю-
щий, какую поперечную силу можно приложить к колесу, чтобы
оно катилось с углом увода, равным 1 рад.
Для малых углов увода
(4...6°)
коэффициент
К
ув
приближенно
можно считать постоянным. Для шин легковых автомобилей
К^
=
=
2,5...5
кН/рад,
а для шин грузовых автомобилей и автобусов
Куц
=
3...25
кН/рад.
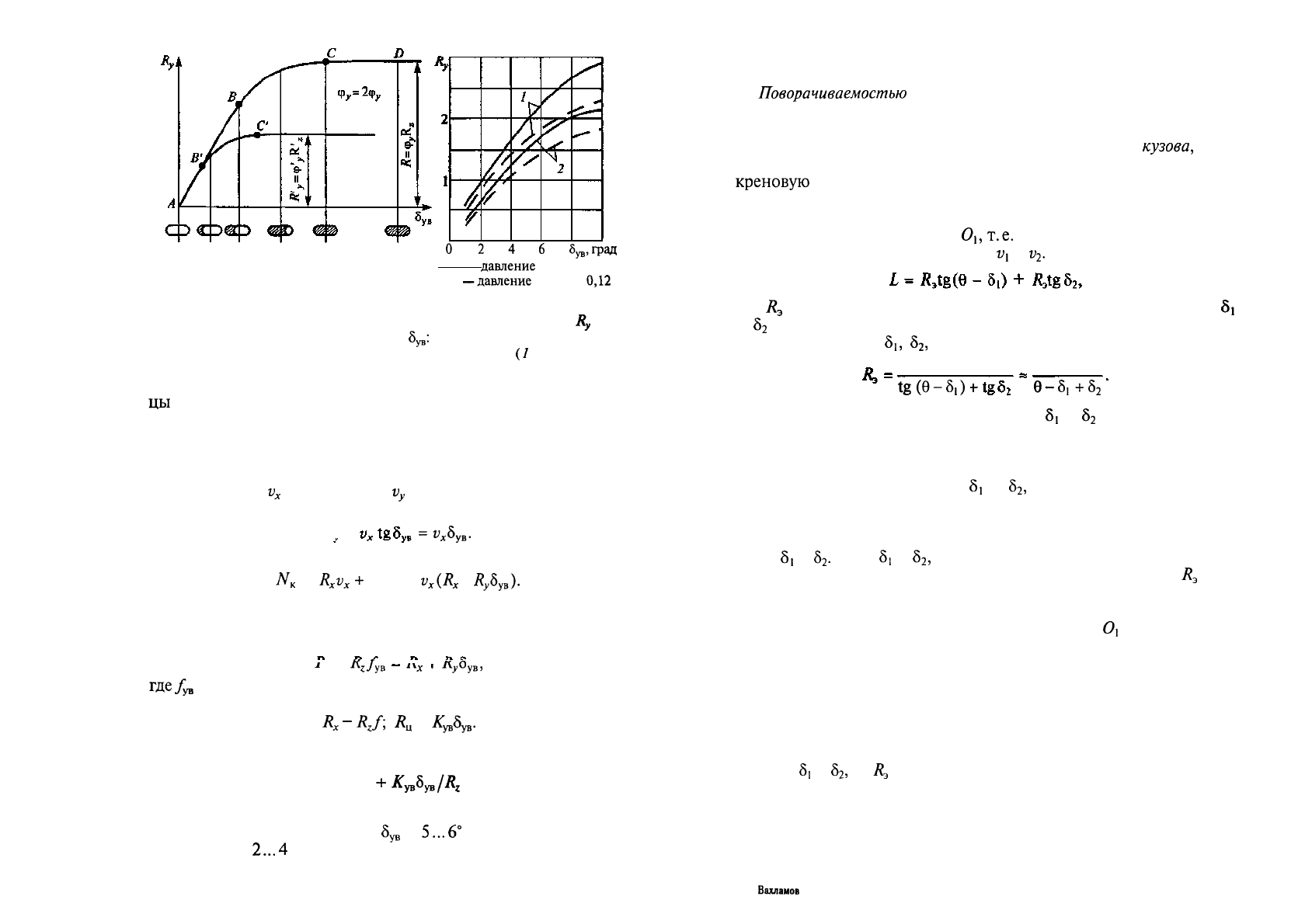
На рис. 27.3, а показан график зависимости поперечной реак-
ции
дороги
R
y
от угла увода
5
ув
,
в нижней части которого изобра-
жены
контактные отпечатки шины (зоны скольжения заштрихо-
ваны).
На участке АБ
(^
<
4...6°)
скольжение практически отсутству-
ет, и зависимость
R
y
=/(8
ув
)
можно считать линейной. В точке С
(5
ув
= 12... 15°) все пятно контакта скользит по дороге, попереч-
ная реакция остается постоянной, и зависимость
R
y
=
/(5^)
ха-
рактеризуется горизонтальной линией CD. На участке ВС эта зави-
симость нелинейна вследствие частичного проскальзывания пят-
на контакта.
Чем меньше коэффициент
ф
л
тем меньше поперечная сила,
вызывающая скольжение колеса. Так, для кривой
ЛВС
значение
коэффициента
ф^
приблизительно в 2 раза больше, чем для кри-
вой
АБ'
С'.
На рис. 27.3, б приведены экспериментальные зависимости угла
увода от поперечной силы для шины размера
6,40—13
при двух
значениях воспринимаемой ею вертикальной нагрузки: (6 кН—
кривые 7 и 2 кН — кривые 2} и при различном давлении воздуха
в шине (сплошные кривые — давление воздуха 0,17 МПа, штри-
ховые — 0,12 МПа).
Как видно, зависимость
R
y
=
Д5
ув
)
в действительности имеет
более сложную форму, чем кривые, показанные на рис. 27.3, а.
В частности, прямолинейные участки в начале кривой у них от-
сутствуют, поэтому считать коэффициент
К^
постоянным можно
лишь с известным приближением. Увеличение вертикальной нагруз-
ки и давления воздуха в шине сопровождается повышением ко-
эффициента сопротивления уводу шины и поперечной силы, вызы-
вающей полное скольжение.
При уводе шина деформируется не только в радиальном на-
правлении, но и в поперечном, вследствие чего внутреннее тре-
ние в ней возрастает. Кроме того, при больших углах увода части-
351
0246
бу^град
давление
в шине 0,17 МПа
—
—давление
в шине
0,12
МПа
а б
Рис. 27.3. Зависимость между поперечной реакцией дороги
Ry
и углом
увода
5
ув
:
а — общая закономерность; б — от вертикальных нагрузок
(7
— 6 кН; 2 — 2 кН)
и давления воздуха в шине
цы
протектора интенсивно проскальзывают по дороге. В результа-
те сила, необходимая для качения колеса, резко увеличивается:
при качении колеса с уводом она может быть в несколько раз
больше силы, которую нужно приложить к нему при качении без
увода.
Продольная
v
x
и поперечная
v
y
скорости колеса, катящегося со
скольжением, связаны между собой соотношением
v =
=г;
х
5
ув
.
Мощность, необходимая для качения колеса с уводом,
Л^
=
R
x
v
*
+
fyy =
V
X
(
R
X
+
Я
у
8
У
в)-
Выражение в скобках представляет собой продольную силу,
которую необходимо приложить к оси колеса, чтобы преодолеть
сопротивление его качению с уводом:
•*
к ~
-"ч/ув
~~
*\х
'
-*\уОуВ9
г
Д
е
Лв
~ коэффициент сопротивления качению при уводе.
Вместе с тем
R
x
~
RJ\
R
u
= ^ув^ув-
Следовательно, коэффициент сопротивления качению при уводе
/ув = /
+
-Кув&ув/-К
г
•
Увеличение сопротивления качению особенно заметно при
больших углах увода. Так, при
5
ув
=
5...
6°
сопротивление качению
может быть в
2...
4
раза больше, чем при качении колеса без увода.
352
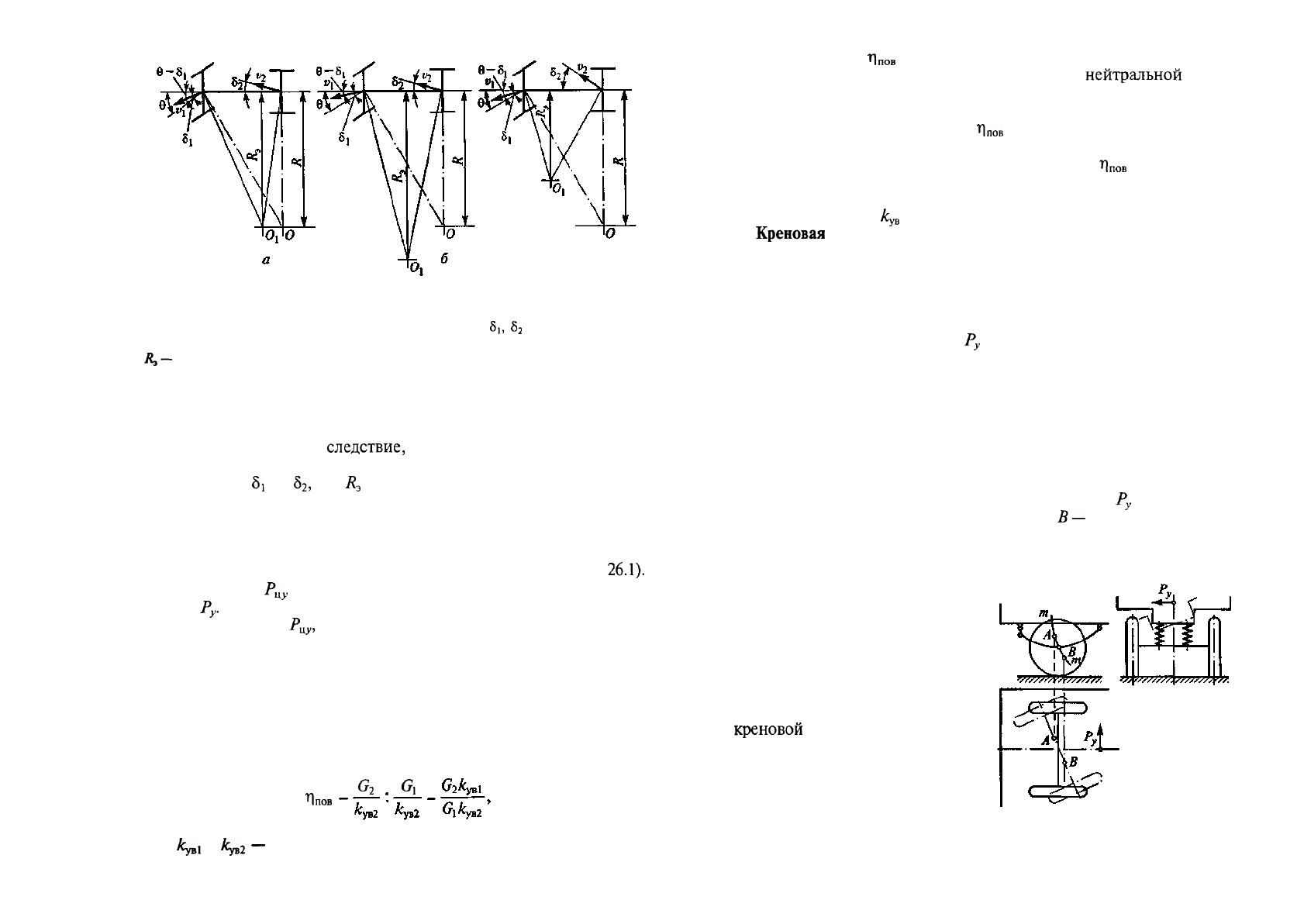
27.4. Поворачиваемость автомобиля
Поворачиваемостъю
называют свойство автомобиля изменять
направление движения без поворота управляемых колес. Есть две
основные причины поворачиваемости: увод колес, вызываемый
поперечной эластичностью шин, и поперечный крен
кузова,
свя-
занный с эластичностью подвески. Соответственно различают и
креновую
поворачиваемость автомобиля.
Поворачиваемость. При наличии увода центр поворота авто-
мобиля находится не в точке О (рис. 27.4, а), как у автомобиля с
жесткими шинами, а в точке
0
Ь
т.е.
в месте пересечения перпен-
дикуляров с векторами скоростей
v
{
и
v
2
.
Тогда
где
R
3
— радиус поворота автомобиля с эластичными шинами;
8i
и
8
2
— углы увода соответственно переднего и заднего мостов.
Так как углы 0,
8
Ь
8
2
,
обычно невелики, то радиус
L L
(27.4)
tg(0-8,)
е-6,+6
2
Для автомобиля с жесткими шинами
5j
=
8
2
= 0 и для радиуса
поворота справедлива формула (26.2).
Таким образом, траектория движения автомобиля с жесткими
шинами зависит только от угла 6. У автомобиля же с эластичными
шинами на нее влияют углы
8]
и
6
2
,
которые, в свою очередь,
зависят от угла 0, скорости v и других факторов.
При наличии увода автомобиль может двигаться криволиней-
но даже при 0 = 0. Кривизна траектории зависит от соотношения
углов
Ь\
и
8
2
.
Если
8!
=
8
2
,
то поворачиваемость автомобиля назы-
вают нейтральной. Хотя при этом согласно формуле (27.4)
R
3
= R,
но траектория движения автомобиля с жесткими шинами не со-
впадает с траекторией автомобиля, имеющего нейтральную по-
ворачиваемость, так как центры поворота О и
О\
в этих случаях
занимают различные положения.
В случае действия поперечной силы на автомобиль, имеющий
жесткие шины, он сохраняет прежнее направление движения до
тех пор, пока эта сила не станет равной силе сцепления. Автомо-
биль, имеющий нейтральную поворачиваемость, под действием
поперечной силы движется прямолинейно под углом к прежнему
направлению движения даже при 0 = 0.
Если
8,
>
8
2
,
то
R
3
> R, и для движения автомобиля с эластичными
шинами по кривой радиусом R управляемые колеса нужно повернуть
на угол больший, чем при жестких шинах. В этом случае поворачива-
емость автомобиля называют недостаточной (рис. 27.4, б).
При недостаточной поворачиваемости вектор скорости управ-
ляемых колес отклоняется от продольной оси на угол меньший,
1 2
Бакланов
353
в
Рис. 27.4. Схемы движения автомобилей с различной степенью повора-
чиваемости:
а — нейтральная; б — недостаточная; в — избыточная;
8
Ь
5
2
— углы увода шин
переднего и заднего мостов; 0 — средний угол поворота управляемых колес;
Л,—
радиус поворота автомобиля с эластичными шинами; R — радиус поворота
с жесткими шинами
чем у автомобиля с нейтральной поворачиваемостью. При этом
радиус поворота увеличивается. Это приводит к уменьшению цен-
тробежной силы и, как
следствие,
к уменьшению угла увода, что
способствует сохранению прямолинейного движения.
Если угол
б!
<
5
2
,
то
R
3
< R и для движения автомобиля с
эластичными шинами по кривой радиусом R управляемые колеса
нужно повернуть на меньший угол, чем при жестких шинах. В этом
случае поворачиваемость автомобиля называют избыточной. Если
к автомобилю с избыточной поворачиваемостью приложить попе-
речную силу, то он тоже будет двигаться криволинейно (см. рис.
26.1).
Составляющая
Р
ц>
,
в этом случае направлена в ту же сторону, что
и сила
Р
г
В результате увод возрастает, что увеличивает кривизну
траектории и силу
Р
цу
,
и т. д. Если водитель не повернет управля-
емые колеса в нужном направлении, то центробежная сила может
возрасти настолько, что автомобиль потеряет устойчивость. Та-
ким образом, автомобиль с недостаточной поворачиваемостью
более устойчив и лучше сохраняет направление движения, чем
автомобиль с избыточной поворачиваемостью.
Для количественной оценки поворачиваемости автомобиля
служит коэффициент поворачиваемости
Лпов
~~
GI
.
GI
_
где
Лув!
и
Лув2
~
коэффициенты сопротивления
уводу
соответствен-
но переднего и заднего мостов автомобиля.
354
Коэффициент
т|
пов
при избыточной поворачиваемости больше,
при недостаточной — меньше единицы, при
нейтральной
пово-
рачиваемости он равен единице.
У автомобиля с передним расположением двигателя и задним
ведущим мостом коэффициент
г|
пов
в ненагруженном состоянии
обычно меньше, а при полной нагрузке — больше единицы. У ав-
томобилей с задним расположением двигателя
г|
пов
> 1 и в нена-
груженном состоянии. Коэффициент поворачиваемости является
приближенным, так как в процессе движения автомобиля значе-
ние коэффициента
/^
меняется в широких пределах.
Креповая
поворачиваемость. У автомобиля креновая поворачи-
ваемость зависит от конструкции его подвески. Рассмотрим пово-
рот заднего моста при крене (рис. 27.5). Передние концы рессор
соединены с кузовом простым шарниром, а задние — с помощью
серьги. При прогибах рессоры задний мост перемещается по дуге
mm, причем ось его качания расположена около шарнира. Под
действием поперечной силы
Р
у
кузов автомобиля наклоняется,
вызывая сжатие левых рессор и распрямление правых. Левая рес-
сора, сжимаясь, перемещает задний мост назад (в точку А), а
правая, распрямляясь, перемещает его вперед (в точку В). В ре-
зультате задний мост поворачивается в горизонтальной плоскости
(штриховая линия).
Если углы поворота переднего и заднего мостов не одинаковы
по значению или направлению, то автомобиль вследствие крена
поворачивает, хотя передние колеса остаются в нейтральном по-
ложении. Так, при действии одной и той же силы
Р
у
автомобиль А
(рис. 27.6) повернет направо, а автомобиль
В—
налево. Возникаю-
щая при повороте центробежная сила у автомобиля А направлена
противоположно возмущающей силе, а у автомобиля В — в ту же
сторону. Поэтому автомобиль А
лучше сохраняет направление
движения под действием попе-
речных возмущающих сил. По
аналогии можно сказать, что ав-
томобиль А имеет недостаточную
креновую поворачиваемость, а
автомобиль В — избыточную.
У автомобиля с избыточной
креновой
поворачиваемостью, на
который действует поперечная
сила, кривизна траектории непре-
рывно увеличивается. Это приво-
дит к росту центробежной силы и
дальнейшему уменьшению ради-
уса поворота. Однако максималь-
ное значение угла поперечного
Рис. 27.5. Поворот заднего моста
при крене
355
о
Рис. 27.6. Креновая поворачиваемость автомобиля:
а — недостаточная; б — избыточная
крена обычно ограничено упорами, предусмотренными в конструк-
ции подвески, поэтому креновая поворачиваемость кузова не может
увеличиваться беспредельно.
Креновая поворачиваемость автомобиля тесно связана с дефор-
мацией шин, так как увод колеса возникает не только под дей-
ствием сил и моментов, но и при наклоне колеса к вертикали
(развале). Если направление поперечной силы совпадает с направ-
лением развала, то увод колеса возрастает. При изменении угла
развала на Г угол увода изменяется на
10...20'.
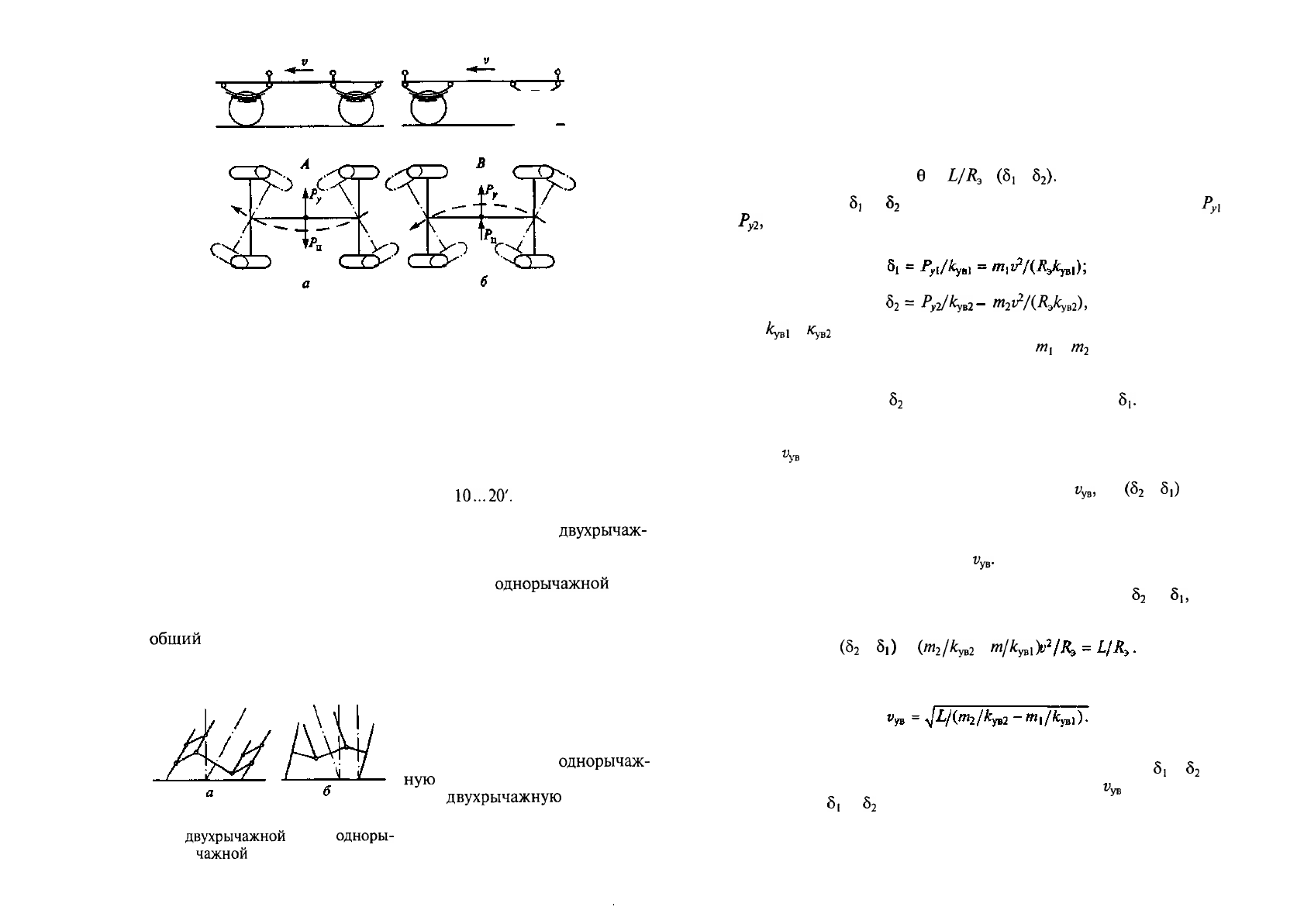
У автомобиля с независимой подвеской колес на поперечных
рычагах крен кузова вызывает изменение развала. При
двухрычаж-
ной подвеске (рис. 27.7, а) колеса наклоняются в сторону крена
кузова и направления действия поперечной силы, в результате
чего увеличивается общий увод моста. При
однорычажной
под-
веске (рис. 27.7, б) колеса наклоняются в сторону, противопо-
ложную крену кузова и навстречу поперечной силе. В этом случае
общий
увод моста, как правило, уменьшается.
Для получения недостаточной поворачиваемости у легковых
автомобилей применяют переднюю независимую подвеску на двух
рычагах. Заднюю подвеску вы-
полняют зависимой или (значи-
тельно реже) независимой на
одном поперечном рычаге. Ни-
когда не применяют
однорычаж-
ную
подвеску для переднего мо-
ста и
двухрычажную
— для зад-
Рис. 27.7. Наклон колес и кузова него, так как это приводит к
при
двухрычажной
(а) и
одноры-
резкому ухудшению управляе-
чажной
(б) подвеске мости.
356
В зависимости от конструкции подвески креновая поворачива-
емость может усиливать или ослаблять степень поворачиваемости.
При движении автомобиль с избыточной поворачиваемостью
может потерять управляемость. Чтобы объяснить это положение,
определим из формулы (27.4) угол поворота управляемых колес,
рад:
6
=
L/R
3
-
(6,
-
6
2
).
(27.5)
Углы увода
8j
и
5
2
пропорциональны поперечным силам
P
yl
и
Р
у2
,
которые, в свою очередь, пропорциональны квадрату скоро-
сти:
>;
(27.6)
^2
=
Py2/ky&
-
т
2^/(Кэ^увт))
(27.7)
где
kyvi
и
к
ув2
—
коэффициенты сопротивления уводу
соответствен-
но переднего и заднего мостов, Н/рад;
m
l
и
т
2
— массы, отнесен-
ные соответственно к переднему и заднему мостам, кг.
При повышении скорости автомобиля углы увода также возра-
стают, причем угол
5
2
увеличивается быстрее угла
6^
Это вызыва-
ет уменьшение разницы в скобках выражения (27.5), которая при
определении так называемой критической скорости по условиям
увода
Vys
оказывается равной нулю. При этой скорости автомобиль
может двигаться криволинейно, хотя его управляемые колеса на-
ходятся
в
нейтральном положении. Если
v >
г>
ув
,
то
(5
2
-
5,)
>
L/R,
и угол 6 становится отрицательным. Это означает, что для пово-
рота автомобиля вправо передние колеса нужно повернуть влево.
Следовательно, автомобиль с избыточной поворачиваемостью те-
ряет управляемость, если v >
v^-
Для определения критической скорости, приравняв угол в
нулю, подставим в формулу (27.5) разность углов
5
2
и
5
Ь
полу-
ченную из выражений (27.6) и (27.7). Тогда
(6
2
-
5,)
=
(/л
2
/£ув
2
-
m/k^
l
)
Следовательно, критическая скорость по условиям увода, м/с,
У автомобиля с недостаточной или нейтральной поворачивае-
мостью критическая скорость отсутствует, так как при
&
{
>
6
2
под-
коренное выражение отрицательно и скорость
г^
является мни-
мой, а при
6[
=
6
2
она равна бесконечности.
Чтобы обеспечить недостаточную поворачиваемость автомоби-
ля, несколько уменьшают давление воздуха в шинах передних колес
по сравнению с давлением воздуха в шинах задних колес и тем
357
самым снижают коэффициент
k^.
Кроме того, центр тяжести ав-
томобиля немного смещают в сторону переднего моста, что уве-
личивает часть центробежной силы, действующей на управляе-
мые колеса.
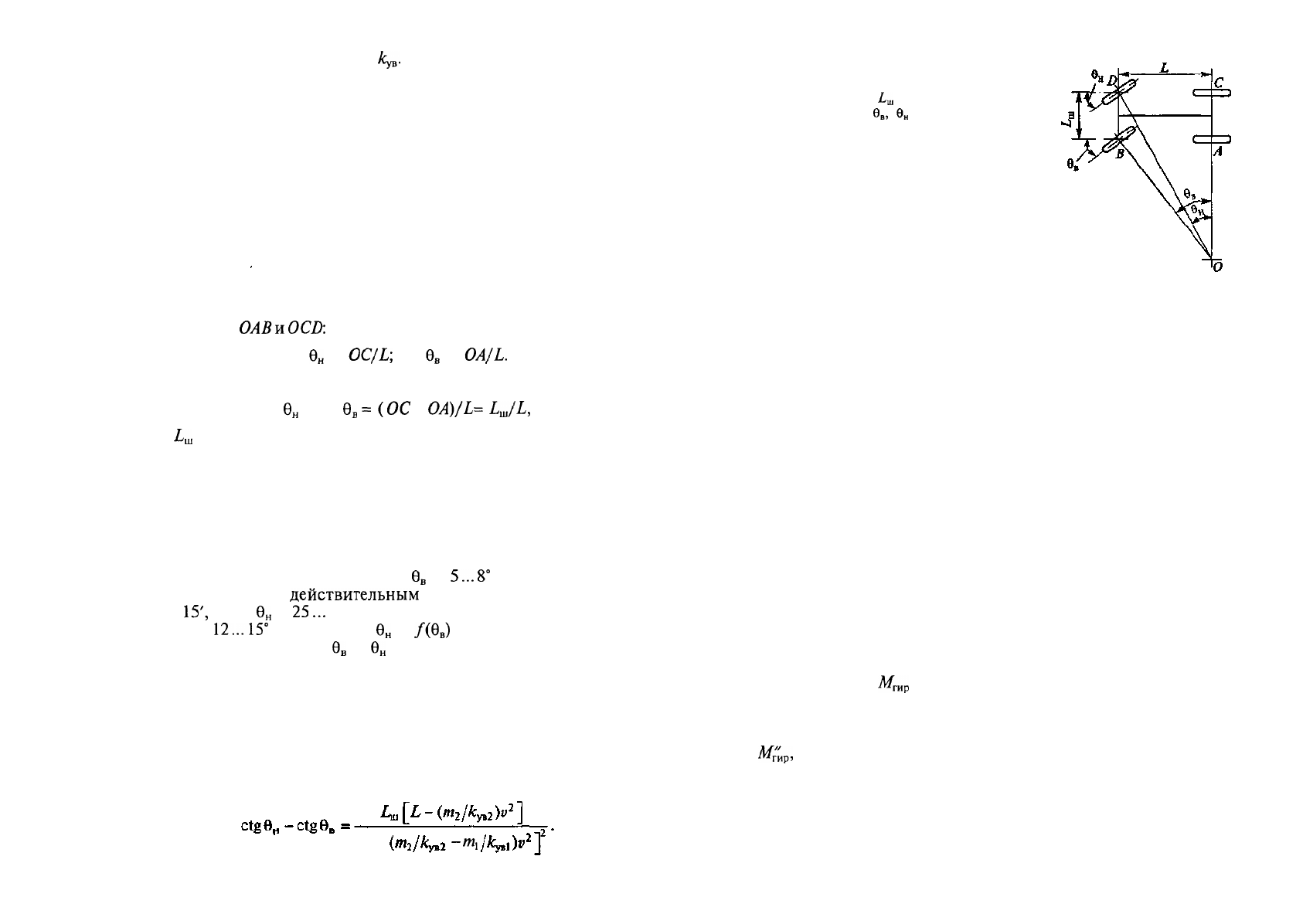
27.5. Соотношение углов поворота
управляемых колес
При повороте автомобиля векторы скоростей центров всех ко-
лес перпендикулярны радиусам, проведенным из центра поворо-
та (рис. 27.8). У автомобиля, имеющего жесткие в поперечном на-
правлении шины, векторы скоростей совпадают со средними плос-
костями колес, и центр поворота О находится на продолжении
оси заднего моста. Соотношение между углами поворота и соот-
ветственно наружного и внутреннего колес определим из тре-
угольников
ОАВп
OCD:
ctg
6
Н
=
OC/L;
ctg
6
В
=
OA/L.
Вычитая из первого равенства второе, получаем
ctg
6
Н
- ctg
9
В
=
(
ОС
-
OA)/L
=
LJL,
(27.8)
где
Ь
ш
— расстояние между центрами шкворней, приблизительно
равно колее управляемых колес, м.
Из равенства (27.8) следует, что колесо, внутреннее по отно-
шению к центру поворота, должно быть повернуто на больший
угол, чем внешнее. Чтобы обеспечить требуемое соотношение между
углами поворота управляемых колес, их соединяют рулевой тра-
пецией. Однако точного выполнения равенства (27.8) трапеция
не обеспечивает. Поэтому при проектировании трапеции считают
достаточным, если при значениях
6
В
=
5...
8°
расхождение между
теоретическим и
действительным
значениями не превышает
12...
15',
а при
6
Н
=
25
...
30° составляет не более 3°. При углах пово-
рота до
12.
..15°
зависимость
6
Н
=
/(6
В
)
близка к линейной, что
позволяет вместо углов
0
В
и
6
Н
использовать в расчетах средний
угол 9, равный их полусумме, как было выполнено ранее.
Если на автомобиле установлены эластичные в поперечном
направлении шины, то векторы скоростей центров колес не со-
впадают со средними плоскостями колес. Изменяется также и от-
ношение углов поворота управляемых колес, которое обеспечи-
вает качение их без бокового скольжения. В этом случае выраже-
ние (27.8) принимает вид:
(27.9)
[L.
~
Щ
358
Рис. 27.8. Соотношение углов поворота
управляемых колес:
L — база автомобиля;
£
ш
— расстояние между
центрами шкворней;
0
В
,
в„
— углы поворота
внутренних и наружных колес соответственно;
О — центр поворота
Из сопоставления формул (27.8) и (27.9) следует, что у автомо-
биля с эластичными шинами по мере увеличения скорости должно
изменяться и соотношение углов поворота колес. Однако это может
быть достигнуто только при автоматическом регулировании рулево-
го привода, введение которого усложнит конструкцию автомобиля.
27.6. Колебания управляемых колес
Во время движения управляемые колеса автомобиля, имеюще-
го зависимую подвеску, могут колебаться вместе с передним мо-
стом в вертикальной плоскости, а вместе с рулевой трапецией —
стремятся повернуться вокруг шкворней (осей поворота) в гори-
зонтальной плоскости.
Угловые колебания управляемых колес вокруг шкворней недо-
пустимы, так как детали ходовой части и рулевого управления
воспринимают при этом значительные знакопеременные дина-
мические нагрузки, а колебания с большой амплитудой приводят
к потере автомобилем управляемости. Наиболее опасными явля-
ются устойчивые колебания колес, т. е. такие, которые непрерыв-
но повторяются (самовозбуждаются).
В случае наклона управляемых колес в вертикальной плоско-
сти, например, при наезде одного из них на неровность дороги,
возникает момент
М
гир
(рис. 27.9, а), действующий в горизонталь-
ной плоскости. Под влиянием этого момента колеса поворачива-
ются относительно шкворней, сжимая амортизационные пружи-
ны рулевого привода. Поворот колес вызывает появление момен-
та
Л/г'ир,
действующего
в
вертикальной плоскости
и
стремящегося
увеличить наклон колес. Таким образом, перекос переднего моста
вызывает угловые колебания колес, которые в свою очередь уси-
ливают перекос моста. Возникнув, колебания продолжаются и
после того, как колесо съехало с неровности.
Уменьшают угловые колебания колес применением независи-
мой передней подвески.
359