Tong W. Wind Power Generation and Wind Turbine Design
Подождите немного. Документ загружается.

New Small Turbine Technologies 395
its scope is mostly limited within the design safety parameters of SWTs. The pri-
mary goal of the new task is to give incentives to this industrial sector to improve
the technical reliability of SWTs and therefore their performance.
4 Wind conditions
4.1 External conditions
SWTs are subjected to external conditions, which are divided into wind condi-
tions, other environmental conditions and electrical conditions [ 1 ].
4.1.1 Wind turbine class
Wind conditions are the primary external conditions and SWT classifi cation is
given in IEC standard IEC 61400-2 depending on wind conditions as shown in
Table 2 .
Reference wind speed is a basic parameter which is defi ned as an extreme
10 min averaged wind speed with a recurrence period of 50 years. For standard
SWT classes I–IV, annual average wind speed is given by the formula:
ave ref
0.2VV=
(5 )
4.1.2 S class
Offshore conditions and conditions experienced in tropical storms (hurricanes,
cyclones and typhoons) are excluded from Standard classes I–IV.
The SWTs that will be driven by the winds whose characteristics exceed those
of standard classes in Table 2 is classifi ed to special S classes.
Both for designers and owners of SWTs, site selection will be quite important,
although mini- or micro-WTs are easily installed at any place or on a building. It
is because wind conditions considerably vary depending on the site. For large
WTs, the sites are mostly open free fl ow fi elds, while for SWTs the sites may often
gardens, parks, roofs or rooftops of urban houses/high buildings, etc. At these
sites, fl ow characteristics are often quite turbulent and those SWTs installed there
should be also classifi ed into S.
Table 2: Basic parameters for SWT classes (IEC 61400-2).
SWT class
I II III IV S
Reference wind speed,
V
ref
(m/s)
50 42.5 37.5 30 Values to be specifi ed
by the designer
Annual averaged wind
speed, V
ave
(m/s)
10 8.5 7.5 6
Turbulence intensity at
V = 15 m/s
0.18
396 Wind Power Generation and Wind Turbine Design
4.2 Normal wind conditions and external wind conditions
Wind conditions are usually divided into two wind conditions: normal wind
conditions and extreme wind conditions. The former will occur frequently during
normal operation of a WT through its lifetime and very much related to fatigue,
while the latter will occur very rare after their defi nition of 1-year or 50-year
recurrence period and relate to ultimate loads.
4.3 Models of wind characteristics
Wind speed distribution, wind profi le (wind shear model), turbulence model,
extreme wind speed model, gust model and model of wind direction change are to
be used for calculations of loads.
5 D esign of SWTs
A wind turbine is designed to capture maximum energy from the wind and to ensure
the safety under any external and internal condition. Safety and performance are the
main technical requirements in the design procedure.
Design procedure is given in IEC 16400-2 to attain the engineering and techni-
cal requirements to ensure the safety of the structural, mechanical, electrical and
control systems.
5.1 Conceptual design
5.1.1 HAWT or VAWT
Wind turbines are classifi ed into two types: HAWT and VAWT. They have some
different technical features as shown in Table 3 .
It is well known that lift-driven wind turbines have much higher performance
than drag-driven types from the aerodynamic theory.
Table 3: Technical features of HAWT and VAWT.
Item HAWT VAWT
Performance Lift-driven and high Lift-driven and high (Darrieus
rotor), drag-driven and low
(Savonius rotor)
Power/speed
control
Variable pitch control is
possible
Usually, variable pitch control
is not possible
Yaw control Needed Free from yaw control
Structural
arrangement
Nacelle is on the top of the
tower
All the components except
rotor are on the ground level
Support structure Support structure like gay
wire will not induce vibration
Support structure like gay wire
may induce vibration

New Small Turbine Technologies 397
Structural simplicity is reliability as well as beauty. From this point of view, no
pitch control and/or no yaw control is desirable. However, power control/rotational
speed control is vital with such a rotating machine in the free fi eld under all weather
conditions. This results in that power/speed control system including brake system
is very important.
As shown in Table 3 , in general, a HAWT can easily be equipped with both
aerodynamic regulation system (pitch control or stall regulation) and mechanical
brake. However, with SWTs, especially with micro-WTs, pitch regulation is pref-
erably not engaged in order to avoid the structural complexity. This point is very
special with SWTs and a designer must fi rst decide the method how to control the
power/speed of the WT together with the type of WT.
5.1.2 Wind characteristics
Design wind turbine class is decided according to Table 2 depending on the wind
characteristics of the site where the wind turbine is to be installed.
The wind characteristics of the site are expressed in a series of mathematical
models in IEC standard so that all important load cases that act on the wind turbine
can be evaluated for the structural design. A full combination of aerodynamic design,
structural design and design of control system will give the engineering integrity.
5.2 Aerodynamic design
5.2.1 Annual energy production
Design methods for SWTs are basically same as those for LWTs. However, vari-
able pitch control system is often avoided with mini- and micro-WTs. Yaw system
is also passive to avoid additional power sources for control. Therefore, simplifi ed
systems in structures or in control will bring some special problems to SWTs.
With a SWT with fi xed pitch control system, aerodynamic design must be
completed in combination with power/speed control system and brake system.
Once technical solutions to start or stop the turbine as designed are found, the
aerodynamic design is proceed.
Let f ( V ) and P ( V ) be a probability density function of wind speed at a site and
a power curve of a wind turbine, respectively. Then the expected annual energy
production (AEP) is:
out
in
3
0
AEP ( ) ( )d ( )(0.5 )d
V
P
V
fVPV V fV VAC Vr
∞
==
∫∫
(6 )
where V
in
and V
out
are cut-in and cut-out wind speed respectively, and A and C
P
are
the rotor swept area and power coeffi cient.
f ( V ) is usually well fi tted by Weibull distribution function expressed in the
following formula:
1
() exp
kk
kV V
fV
CC C
−
⎛⎞
⎛⎞ ⎛⎞
=−
⎜⎟
⎜⎟ ⎜⎟
⎝⎠ ⎝⎠
⎝⎠
(7 )
where k and C are shape and scale parameters of Weibull distribution, respectively.

398 Wind Power Generation and Wind Turbine Design
5.2.2 Optimization for maximum energy yield
An optimization is given by the condition that AEP will be maximum, i.e.:
AEP Max→
(8 )
A rotor designer must fi nd the optimal power curve P ( V ) together with WT
operation modes. An optimal rotor geometry which comprises of chord and twist
distributions and aerofoil sections is found in combination with operation modes;
cut-in, cut-out and rated wind speed in principle. Thus an optimal rotor design is
site-dependent. Further, since every reliable operation mode depends on power/
speed control methods, conceptual design of control methods are also needed at
the initial stage.
5.2.3 One-point optimal rotor design
Simplest optimization of rotor design is “One-point design method”, in which an
optimal rotor geometry is determined for one operation point: one combination of
a design wind speed V
D
and a design rotor speed Ω
D
by using BEM theory [ 2 ].
The optimization is given by the following condition for V = V
D
with selected rotor
speed Ω
D
:
Max. At every axial position of rotor blade
P
C →
(9 )
Algebraic solution determines the chord and twist distributions along its axis of
the blade. However, it must be noticed that “One-point design method” does not
always give the maximum AEP, because a maximum AEP is obtained under the best
combination of decided WT’s operation mode and wind characteristics at the site.
The question is how to decide design wind speed V
D
.
The simplest design by BEM theory is conducted under the following
assumptions:
Low Reynolds number effect is negligible •
Power curve is a function of tip speed ratio • l only.
Then eqn (6) is expressed as:
out
R
in R
3
3
RR
1
AEP ( ) ( )d ( ) ( )d
2
V
V
PP
VV
AfVVC VVC fVVrll
⎧⎫
⎪⎪
=+
⎨⎬
⎪⎪
⎩⎭
∫∫
(10 )
where V
R
is rated wind speed and
R
R
R
R
V
l
Ω
=
(11 )
Max(AEP) is derived as follows:
In case of variable-speed operation WT, an optimal l
opt
≈ l
R
is defi ned and the
optimal value can be possibly in the manner:
opt in R
for VVVll≈≤≤
(12 )

New Small Turbine Technologies 399
Then the optimal value of C
Popt
= C
P
( l
opt
) is kept and by choosing l
opt
= l
R
,
AEP → Max in eqn (10). The second term of in the integral of the right side of eqn
(10) is determined by the wind speed probability function f ( V ).
5.2.4 In case of constant-speed WT
In case of fi xed-speed WT, l varies with V in proportion to 1/ V . Therefore, an
optimal value of design tip-speed ratio l
opt
may vary from l
R
. It will be soon
understood if eqn (10) is rewritten as:
out
R
in R
3
3
RR
1
AEP ( ) ( )d ( ) ( )d
2
V
V
PP
VV
A fVVCV V VCV fV Vr
⎧⎫
⎪⎪
=+
⎨⎬
⎪⎪
⎩⎭
∫∫
(13 )
Since C
P
is a function of V , AEP is also a function of V , but depends on C
P
( V )
and f ( V ). This means an optimal rated wind speed V
R
and an optimal design wind
speed V
D
will be obtained through making AEP → Max. taking into account the
characteristics of WT, i.e. C
P
( V ), and wind, i.e. f ( V ), which are independent of
each another.
An empirical formula is known as
R mean
(1.2 1.5)VV≈−
(14 )
where V
mean
is the annual mean wind speed at the site and is statistically given as
follows when the wind characteristics follow Weibull distribution:
[]
mean
0
1
()d 1VEVVfVVC
k
∞
⎛⎞
==⋅ =Γ+
⎜⎟
⎝⎠
∫
( 15 )
where Γ denotes the Gamma function.
5.2.5 Multi-point optimal rotor design
A goal is to give AEP a maximum value of the integration in eqn (10). One of the
simplest methods is “Multi-points design method”, with which some desirable
power curve is delivered by combination of plural design points. Various original
designs are possible, but most important thing is to fi nd a solution that the operation
modes together with the power curve of a SWT will most fi t to the characteristics of
the wind at the site where to install the WT.
It is very often experienced that under low wind speed conditions just around
cut-in wind speed, a fi xed-pitch SWT will hard to start rotation or generation if it
stands still, however it will soon do if it is in idling state. Let assume that cut-in
and rated wind speed are 2.5 and 10 m/s, respectively. The ratio of the power out-
put is 1:64. Although the power output at cut-in wind speed is less than 2% of that
at rated wind speed, fast start-up performance will result in better availability in
time and higher energy production.
400 Wind Power Generation and Wind Turbine Design
5.3 Selection of aerofoil sections
In general, C
P
is a function of several parameters:
(, ,, )
PP
CC Relbe=
(16 )
where l , b , e and Re tip-speed ratio, pitch angle, drag-lift ratio and Reynolds num-
ber, respectively. All these parameters relate to the fl ow condition on the rotor
blade. Typically, l and b defi ne the fl ow angle at every location along the blade and e
and Re directly relate to the performance of the aerofoil section at the location. Thus,
selection of aerofoil section is very important.
5.3.1 Mechanism of performance reduction
Wind turbines of high performance are driven by lift.
According to BEM theory, local power produced by a blade element has a
expression:
Local power : (1 cot )PrejΔ∞ − Δ
(17 )
where j is fl ow angle on a blade element of length Δ r and e is drag lift ratio of
the blade element. At an ideal fl ow angle, e ≈ 0.01–0.02, but if a stall occurs on
the blade element e > 1.0, which suggests both selection of aerofoil sections and
control of relative low condition between a blade and air fl ow are keen to the rotor
aerodynamic performance.
Thin aerofoil sections have usually smaller drag coeffi cients than thick sec-
tions. However, they will soon fall into stall if the angle of attack varies from the
ideal condition. At such laminar separations with SWTs, the performance reduc-
tion is considerably large. Thick aerofoil sections have high structural stiffness
than thin aerofoil sections, but usually have higher values of e which induce
higher energy loss.
5.3.2 High lift devices
To avoid the laminar separations, and also to regulate the power output and rotor
speed, several techniques are used.
Pitch regulation is the most effective active method, but is sometimes diffi cult to
apply to SWTs with less space or capacity for control power.
Vortex generator (VG) is simple and useful high lift device. Even a large WT
benefi ts from this device. Longitudinal vortexes generated by VGs prevent the
boundary layer from inducing large scale laminar separations, but drag coeffi cient
will usually slightly increase.
Start-up assist method is a smart technology to improve the fl ow condition on
rotor blades by accelerating the rotor. When a rotor condition is far from design
point, such as rotor speed is very low or wind is very low, for example. An instan-
taneous acceleration of the rotor by additional power source for certain seconds
will bring the fl ow angle into regular conditions capable of generation and the
operation becomes more ideal condition. Although this technology does not work
as a brake device, it works as an alternate method with pitch regulation.
New Small Turbine Technologies 401
5.3.3 Blade material
Aerodynamic performance of a rotor depends on blade structures and materials.
If rotor stiffness is not enough, deformation of rotor blade will move the opera-
tion point from the designed point, thereby the power performance will decrease.
As long as such an aero-elastic effect cannot be refl ected in the rotor design, stiff
materials shall be chosen.
On the other hand, an advanced design may utilize the aero-elastic effect. A
thought-out design of a fl exible rotor may obtain an ability of regulating power
although it is a fi xed pitch system.
5.4 Structural design
Most important works in the structural design is to verify that all the limit states
are not exceeded for the WT design [ 1 ]. Therefore, all the loads that will act on the
WT are determined fi rst and then structural design of the WT and its components
will follow in combination with the WT conditions.
Loads are classifi ed as:
Vibration, internal and gravitation loads •
Aerodynamic loads •
Operational loads caused by yawing, braking, furling, pitching, etc. •
Other loads such as wave loads, wake loads, transport, etc. •
Three different methods for the determination of design loads are described in
IEC Standard 61400-2. Simplifi ed load equation methods are simple but conserva-
tive. The method using aero-elastic modelling is fi ner and more complicated than
the fi rst one. This method has common base with that for general wind turbines.
Design loads can be derived from load measurements.
A designer of SWTs shall refer the IEC standard to understand general design
methodology and conduct design by using equations for loads, table of load cases
and safety factors.
6 Control strategy of SWTs
Decision of the control strategy of a SWT is also important element in the initial
system design. Both of its power output control and yaw control are usually quite
different if compared with those of LWTs, particularly with mini- and micro-WTs.
The reasons are:
The representative system speed • Ω
D
is proportional to 1/ D as shown in eqn (4),
which means SWTs are higher rotational speed machines than LWTs and the
control rate shall be faster in proportion to 1/ D .
SWTs are more apt to be infl uenced by various kinds of local turbulence than •
LWTs.
402 Wind Power Generation and Wind Turbine Design
Thus it should be understood that both speed control and yaw control perfor-
mances are requested to be as high as or higher than LWTs.
Upon this nature, the fi rst issue to decide on the control strategy is whether to adopt
active control or passive control concept. The former is a concept to control the system
using a yaw drive with any kind of active power source such as electric or hydraulic
power actuators, while the latter is to control by natural forces generated by wind
or mechanical forces such as centrifugal force without using any active power source.
The fi ner control system based on active control concept is desirable at one
hand, however, there are another reasons that passive control concept is attractive
at another. The passive control concept gives us the advantage of structural sim-
plicity, which would give greater reliability in general, provides as smart control
measures using natural force without extra control power sources and supplies us
at more economical cost.
In principle both concepts exist in LWT design and large turbines, but the status
of technical tendency is that more complete active control concept with LWTs and
more passive control concept or less active control concept with SWTs. Should
“smart” technologies be really smart, the passive control concept could be also
popular with LWTs in future.
There is an evidence for this. For long, a constant-speed operation system was
technically thought to be most suitable for grid connected systems simply because the
electrical grid has constant frequency and the rotor should be regulated to rotate at
constant speed. But wind will seldom keep blowing constantly at the rated wind speed
at most of the time during the operation of wind turbine. It is much more natural for a
WT to work at any given wind speed with higher effi ciency but with less extra active
power source. The solution was given by “variable operation systems” which employ
a power convertor system such as AC–DC–AC generator system. Electronically
fi ner and faster while mechanically less loaded, is modern technical tendency.
Decision of choosing either of constant-speed operation or variable-speed
operation is also important task.
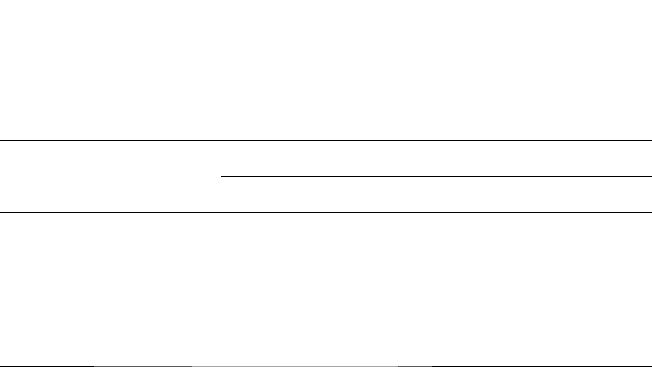
Figure 5 shows an example of a basic performance of an optimal rotor design.
The rotor is designed by BEM theory at design wind speed of 10 m/s, tip-speed
ratio of 7 m for 10 m of rotor diameter using a thin wing section of Illinois Univer-
sity. Once aerofoil section(s) selected, Reynolds number effect neglected and pitch
angle fi xed, then C
P
is a function of l = r Ω / V only.
Maximum C
P
is 0.475 for l = 7 at the design point. When neglecting the effect
of low Reynolds number, as long as l = 7 is kept, the rotor produces power with
maximum aerodynamic effi ciency. As shown in Fig. 5 , C
P
( l ) will decrease with
constant-speed system ( Ω = Ω
D
= Const.) as l departs from the design point while
keeping pitch angle constant. As a result,
0.4 only for 7.5 m/s < < 14 m/s
P
CV≥
(18 )
On the other hand, with a variable-speed operation rotor, optimal C
P
can be real-
ized if the optimal rotor speed is properly regulated. In this case, under the varying
natural wind speed, it is desirable to keep l = l
opt
= 7, or to vary rotor speed in the
manner: Ω = ( V / R ) l
opt
.
New Small Turbine Technologies 403
7 Yaw control
Yaw control is a function to face the rotor to the natural wind so that the WT can
capture maximum energy from the wind. Therefore, a WT shall face perpendicular
to the wind directions as much as possible at all times. Because of the dimensional
effect, a SWT will much more susceptible to be caught in local smaller eddies than
LWTs and as a result, yaw control is technically more complicated than LWTs.
One thing most desirable is stable wind, however, the people often like to install
SWTs rather close to or directly upon buildings where the wind tends to be more
turbulent.
It might be better to provide a fi ne yaw controls system but actually almost all
mini- and micro-WT have passive control systems.
Yaw motion is governed not only by yaw control device but also inertia and gyro-
scopic moment of the nacelle and yawing dynamic ability of the rotor itself. Some
typical yaw control systems with mini- and micro-WTs are described below.
7.1 Tail wing
An upwind oriented rotor could have yaw instability. Most of LWTs except
downwind type is equipped with a yaw control system driven by a hydraulic
or electric power. With SWTs of mini- or micro-classes, however, a tail wing is
mostly used as a passive control system. Tail wing is a simple and classic tool
since the middle aged.
7.1.1 Variety of tail wings
The performance of a tail wing as an aerofoil as well as the performance of
yaw control, both in static and dynamic response, is decided by the aerody-
namic performance of the tail wing. Then, there are various types and shapes
of tail wings.
0
2
4
6
8
10
12
14
0 5 10 15 20 25
Wind Speed V m/s
λ
= RΩ/V
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Power Coefficent C
p
C
p
λ
Figure 5 : A sample of power coeffi cient obtained by BEM theory .
404 Wind Power Generation and Wind Turbine Design
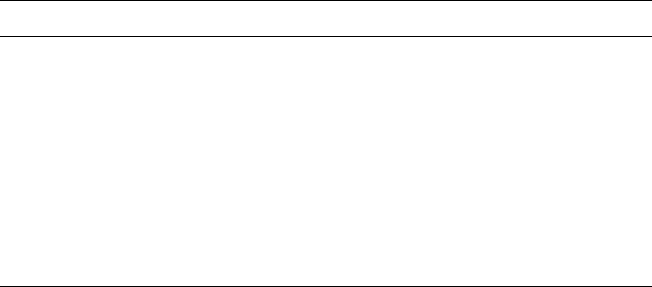
Figure 6 shows a various shapes of tail wings. There is no ultimate shape of the
tail wing at all, because there are many yaw control strategies at one hand, there
are many wind characteristics depending on the site at another.
The yaw control moment is the product of aerodynamic force on the aerody-
namic centre of the wing and the distance from yaw axis to the centre. The tail
wing (a) has much small aspect ratio than the tail wing (b). Then wing type (a) has
smaller lift coeffi cient at small attack angles, i.e. less yaw control force than type
(b). However, under high turbulent wind conditions, too strong control force will
sometimes bring unstable yaw motion.
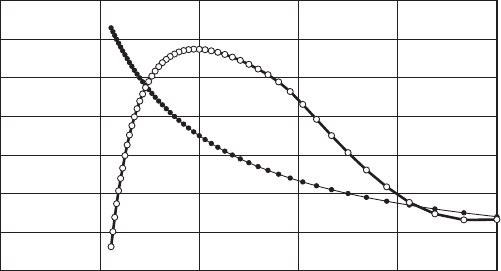
7.1.2 New types of tail wings
Some unique and advanced types have been developed. The tail wing design shown
in Fig. 7 has an elegant shape.
A swing ladder shown in Fig. 8 is a swinging tail wing. The ladder which
works as a wing is pin-jointed to the tail-end of the nacelle free in rotation around
the pin-axis. This system responds fl exible to varying wind speed and directions
and one of the large advantages is the regulative effect that prevents the excessive
response and oscillating motion of the tail.
(a) (b) (c) (d)
Figure 6 : Various types of tail wings.
Figure 7: Modern tail wing (Courtesy of Anna Estanqueiro, IEA WIND).