Таранчук А.И., Сапожников Г.А. Основы автоматического управления
Подождите немного. Документ загружается.

9
2. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ
ЛАБОРАТОРНЫХ РАБОТ
Лабораторная работа № 1
СИСТЕМА УПРАВЛЕНИЯ КУРСОМ
ЛЕТАТЕЛЬНОГО АППАРАТА
Цель работы: 1) моделирование системы управления с помощью па-
кета прикладных программ; 2) определение динамических параметров
системы.
1. Краткое математическое описание системы
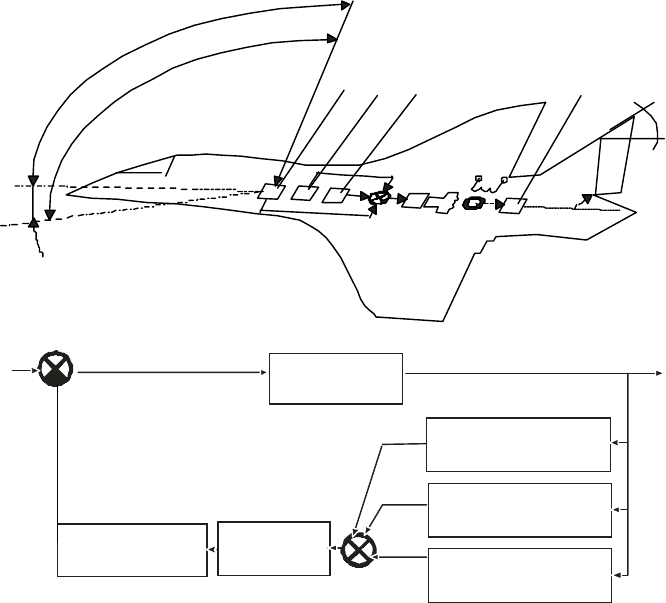
Упрощенная схема системы изображена на рис. 2.1, а, б (а – струк-
турная схема, б – функциональная).
Рис. 2.1
ДУ
ДУС
ДУУ
УС
Р
ст
Ψ
Ψ
3
Ψ
САМОЛЕТ
Исполнительное
устройство
Усилитель
Датчик углового
ускорения
Датчик угловой
скорости
Датчик угла
f
1
(t)
Ψ
10
Система работает следующим образом. Отклонение самолета от
заданного курса, т. е. углы рысканья самолета, принимаются малы-
ми. Зависимостью движения самолета по курсу от движения по тан-
гажу и от движения по крену пренебрегаем.
Система автоматического управления, изображенная на рис. 2.1,
состоит из:
самолета – объекта управления;
автопилота – регулятора.
Основной задачей автопилота является автоматическое поддержание
заданного курса летательного аппарата с определенной точностью.
Возмущающие воздействия (несимметричность тяги двигателей,
порывы ветра и т. д.) отклоняют самолет от заданного курса.
Датчик угла (ДУ) – гироскоп направления – измеряет это откло-
нение – угол Y , датчик скорости (ДУС) измеряет угловую скорость
Y
1
этого отклонения , а датчик углового ускорения (ДУУ) – угловое
ускорение Y
2
. Результаты измерений в виде электрических сигналов
U
1
, U
2
, U
3
поступают на вход усилителя , который одновременно
является и суммирующим устройством. С выхода усилителя сигнал в
виде переменного тока поступает на исполнительное устройство –
электродвигатель с редуктором, который через редуктор поворачи-
вает рулевую поверхность на угол Y.
Система управления курса летательного аппарата [1] описывает-
ся следующей системой дифференциальных уравнений, записанных
в стандартной форме:
объект регулирования (“нейтральный самолет” – β = 0)
(T
1
S + 1) S∆Ψ = -K
1
∆δ + f
1
(t);
уравнения звеньев, входящих в регулятор:
измерители (гироскопы совместно с потенциометрическими дат-
чиками):
∆U
1
=
К
3
∆Ψ,
∆U
2
= К
1
3
S
∆Ψ,
∆U
3
= R
11
3
S
2
∆Ψ;
уравнение усилителя
(T
3
S + 1) ∆I = K
4
∆U
1
+ К
5
∆U
2
+ К
6
∆U
3
;
уравнение исполнительного устройства (двигатель с редуктором)
(T
4
S + 1) S∆δ = K
8
∆I.
11
2. Подготовка исходных данных для моделирования
Исходные данные для моделирования системы приведены табл. 2.1.
Таблица 2.1
Примечание: -Т
3
= Т
4
= 0; начальные условия нулевые; К
x
= К
3
К
4
К
8
,
К
y
= К
1
3
К
5
К
8
, К
z
= К
11
3
К
6
К
8
.
Подготовка исходных данных для моделирования производит-
ся следующим образом. В каждом из шести предлагаемых вари-
антов из шести параметров, необходимых для моделирования, не-
известны два: К
y
и К
z
.
Для их нахождения необходимо проделать следующее:
1) используя уравнения объекта регулирования и регулятора, со-
ставить единое дифференциальное уравнение системы в стандарт-
ной форме записи;
2) “понизить” порядок дифференциального уравнения с учетом
допущений, указанных в примечании к табл. 2.1;
В результате динамические процессы в системе управления
курса ЛА будут описываться дифференциальным уравнением 3-
го порядка;
3) построить границу устойчивости в плоскости двух неизвест-
ных параметров (К
y
и К
z
) с использованием критерия устойчивости
Вышнеградского;
4) по построенному графику зависимости К
z
= f(К
y
) определить
область устойчивости системы;
5) выбрать неизвестные параметры К
y
и
К
z
системы из найден-
ной области устойчивости.
ï/ï¹òíàèðà T
1
ñ, Ê
1
ñ/1, Ê
õ
c/1, Ê
ó
ñ/1, Ê
z
ñ/1, f
1
(t)
11-12.02.10.2õÕ1
22-13.04.14.2ÕÕ1
33-14.06.18.2ÕÕ1
44-15.08.12.3ÕÕ1
55-16.00.26.3ÕÕ1
66-17.02.20.4Õõ1
12
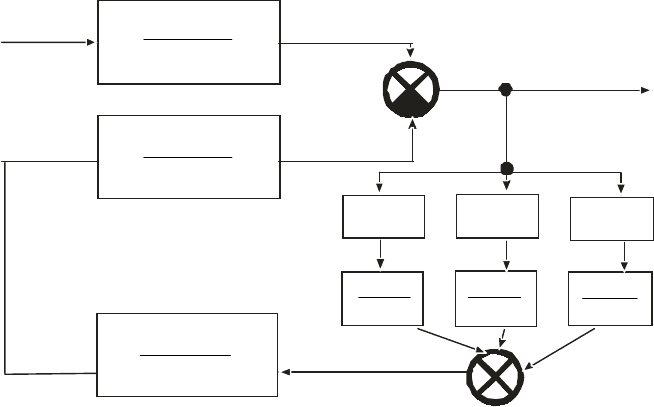
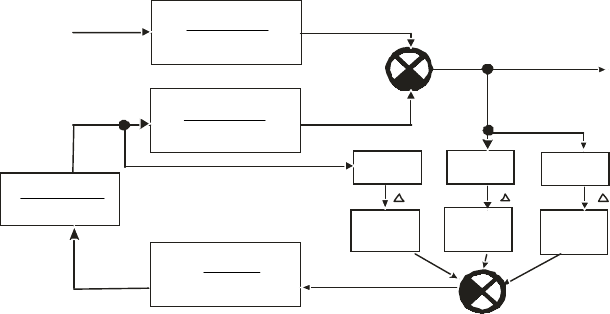
3. Порядок выполнения работы
Используя уравнения объекта регулирования – самолета и уравне-
ния звеньев, входящих в регулятор, построим структурную схему систе-
мы, приведенную на рис. 2.2.
Упрощаем полученную модель с учетом того, что T
3
= T
4
= 0.
Применяя краткие рекомендации к пакету Simulink, набираем уп-
рощенную структурную схему системы управления курсом ЛА.
В передаточных функциях Transfer F
сп
в числитель и знаменатель
вводим параметры, соответствующие исходным данным для модели-
рования.
Возмущение f
1
(t) задаем в виде скачка Step. Регулируемый курс
самолета ∆Y регистрируется с помощью графопостроителя Scope.
Постоянные коэффициенты передачи устанавливаются с помо-
щью блоков Gain.
Соединение блоков (звеньев), входящих в систему управления,
осуществляется в соответствии со структурной схемой по рассмот-
ренным ранее рекомендациям.
После соединения блоков на рабочем поле ПЭВМ получается ис-
ходная модель.
Рис. 2.2
К
3
К
3
S
К
3
S
2
-
V
3
V
2
V
1
∆δ
I
∆
1
1
(1)
TS S
+
1
1
(1)
K
TS S
+
8
4
(1)
K
TS
S
+
Ψ∆
1
()
f
t
4
3
1
K
TS
+
5
3
1
K
TS
+
6
3
1
K
TS
+
∆∆
∆
13
Для выполнения моделирования нужно выбрать пункт Start из меню
Simulation или нажать кнопку >.
Процесс вывода на экран графиков переходных процессов изложен
на с. 5–6 настоящих методических указаний.
4. Содержание отчета по лабораторной работе
Отчет должен содержать:
уравнение самолета и автопилота;
единое дифференциальное уравнение системы управления;
исходные данные для моделирования;
результаты поиска неизвестных параметров К
y
и К
z
;
упрощенную структурную схему системы управления;
исходную модель системы;
графики переходных процессов;
выводы по работе.
Лабораторная работа № 2
СИСТЕМА УПРАВЛЕНИЯ КУРСОМ САМОЛЕТА
С ЗАКОНОМ РЕГУЛИРОВАНИЯ ПО ОТКЛОНЕНИЮ И ПЕРВОЙ
ПРОИЗВОДНОЙ ПРИ НАЛИЧИИ ЖЕСТКОЙ ОБРАТНОЙ СВЯЗИ
Цель работы: 1) моделирование системы управления с помощью па-
кета прикладных программ; 2) определение динамических параметров
системы.
1. Краткое математическое описание системы
Упрощенная функциональная схема системы изображена на рис. 2.3.
Рис. 2.3
САМОЛЕТ
Исполнительное
устройство
Усилитель
Датчик угловой
скорости
Датчик угла
Обратная связь
∆Ψ
1
()ft

14
Возмущающее воздействие отклоняет самолет от заданного курса.
Датчик угла измеряет это отклонение – угол рысканья Ψ, а датчик угло-
вой скорости измеряет первую производную Ψ
1
по времени от угла Ψ.
Результаты измерений в виде напряжений поступают на усилитель,
который одновременно является и суммирующим устройством.
В системе осуществлена дополнительная жесткая отрицательная об-
ратная связь по углу δ – углу перемещения руля.
С выхода усилителя сигнал поступает на исполнительное устрой-
ство, которое приводит в действие руль ЛА.
САУ описывается следующей системой дифференциальных уравне-
ний, записанных в стандартной форме:
объект регулирования (“нейтральный самолет” – β = 0)
(T
1
S + 1) S∆Ψ = -К
1
∆δ + f
1
(t);
уравнения звеньев, входящих в регулятор:
измерители (гироскопы совместно с потенциометрическими датчи-
ками):
∆U
1
= К
3
∆Ψ,
∆U
2
= К
1
3
S
∆Ψ;
обратная связь
∆U
4
= -К
9
∆δ;
уравнение усилителя с сумматорами
(T
3
S + 1) ∆I = К
4
∆U
1
+ К
5
∆U
2
+ К
7
∆U
4
;
уравнение исполнительного двигателя с редуктором
(T
4
S + 1) S∆δ, = К
8
∆I.
2. Подготовка исходных данных для моделирования
Исходные данные для моделирования системы сведены в табл. 2.2.
Таблица 2.2
ï/ï¹òíàèðà T
1
ñ, Ê
1
ñ/1, F
1
(t)
Ψ
òñ
,
äàðã
Ê
x
ñ, Ê
y
ñ, Ê
ñî
11-20.36.34.18.1õõõ
22-25.38.36.10.2õõõ
33-20.49.38.12.2õõõ
15
Окончание таблицы 2.2
Примечание: -T
3
= T
4
= 0; начальные условия нулевые; К
x
= К
3
К
4
К
8
, К
y
=
К
1
3
К
5
К
8
, К
ос
= К
7
К
8
К
9
.
Подготовка исходных данных для моделирования производится сле-
дующим образом.
В каждом из шести предлагаемых вариантах из семи параметров,
необходимых для моделирования , неизвестны три: К
x
, К
y,
К
ос
.
Для их нахождения необходимо проделать следующее:
1) используя уравнения объекта регулирования и регулятора, со-
ставить единое дифференциальное уравнение системы;
2) “понизить” порядок дифференциального уравнения с учетом
допущения -T
3
= T
4
= 0. В результате динамические процессы в сис-
теме будут описываться уравнением 3-го порядка;
3) подставив в полученные уравнения вместо переменных их ус-
тановившиеся значения и соответственно с этим положив все про-
изводные равными нулю, получить уравнение статики в виде
К
1
К
x
∆Ψ
ст
= К
ос
f
1
(t), (2.1)
откуда
К
x
=
(f
1
(t)К
ос
)/(K
1
∆Ψ
ст
). (2.2)
Подставив в уравнение (2.2) известные исходные данные из
табл. 2.2 и переходя от градусов к радианам, найдем
K
x
=
f(K
ос
); (2.3)
4) выразив в едином дифференциальном уравнении коэффициент
K
х
через K
ос
согласно соотношению (2.3), получим уравнение, в
котором вместо трех неизвестных K
x
, K
y
и K
ос
будут только две неиз-
вестные величины K
ос
и K
y
;
5) построить границу устойчивости в плоскости неизвестных
параметров (K
ос
и K
y
) с помощью критерия устойчивости Выш-
неградского;
ï/ï¹òíàèðà T
1
ñ, Ê
1
ñ/1, F
1
(t)
Ψ
òñ
,
äàðã
Ê
x
ñ, Ê
y
ñ, Ê
ñî
44-25.41.40.24.2õõõ
55-20.53.42.26.2õõõ
66-25.55.44.28.2õõõ
16
6) по построенному графику зависимости K
y
= f(K
ос
) определить об-
ласть устойчивости системы;
7) выбрать неизвестные параметры K
ос
и K
y
системы из найденной
области устойчивости.
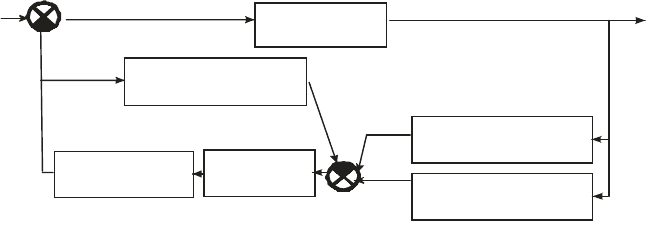
3. Порядок выполнения работы
Используя уравнения самолета и автопилота, построим структур-
ную схему системы, приведенную на рис. 2.4.
Упрощаем полученную модель с учетом того, что Т
3
= T
4
= 0.
Набор упрощенной структурной схемы и сам процесс моделирова-
ния выполняется так же, как и в предыдущем варианте.
4. Содержание отчета по лабораторной работе
Отчет должен содержать:
уравнение самолета и автопилота;
единое дифференциальное уравнение системы управления;
исходные данные для моделирования;
результаты поиска неизвестных параметров K
y
и K
ос
;
упрощенную структурную схему системы управления;
исходная модель системы;
графики переходных процессов;
выводы по работе.
Рис. 2.4
-
V
4
V
2
V
1
К
9
К
3
К
3
К
4
К
5
К
7
∆Ψ
I
∆
1
()ft
∆δ
1
1
(1)TS S
+
1
1
(1)
K
TS S
+
8
4
(1)
K
TS S
+
3
1
1
TS
+

17
Лабораторная работа № 3
СЛЕДЯЩАЯ СИСТЕМА
Цель работы: 1) моделирование системы управления с помощью па-
кета прикладных программ; 2) определение динамических параметров
системы.
1. Краткое математическое описание системы
Функциональная схема следящей системы приведена на рис. 2.5, а, б
(а – структурная; б – функциональная). Система предназначена для сле-
жения в реальном времени и постоянном масштабе вала управляемого
объекта УО за положением задающего вала ЗВ. Вращением рукоятки
задается произвольный закон для угла поворота задающего вала ЗВ во
времени α(t). Тот же закон угла поворота во времени должен быть авто-
матически воспроизведен в заданном масштабе и в реальном времени
на выходе следящей системы β(t), т. е. на управляемом объекте УО.
Рис. 2.5
Г
Д
УО
Мд
ОС
У
U
1
U
2
R
1
R
2
Р
1
Р
2
I
2
1
1
α
α
γ
α
ω
β
β
Датчик согласования
Исполнительное
устройство
Усилитель
Датчик
угла
Дифференци-
рующая
цепь
α
γ
18
Для этой цели угол поворота на выходе β(t) передается с помощью
вала обратной связи ОС на вход системы, где он вычитается из задавае-
мого угла α(t). Вычитание осуществляется с помощью механического
дифференциала МД. Механический дифференциал, выполняющий фун-
кцию датчика рассогласования, сравнивает углы поворота задающего
вала ЗВ и вала обратной связи ОС. Поскольку датчик рассогласования
должен сравнивать величины одного масштаба, в цепь обратной связи
включен редуктор Р, задачей которого является изменение масштаба угла
β. Если угол поворота α(t) задающего вала ЗВ не равен углу поворота
α
1
(t) вала обратной связи ОС, то третий валик дифференциала МД по-
вернется на разность этих углов γ(t) = α(t) - α
1
(t).
Полученное рассогласование γ(t) с помощью потенциометра П пре-
образуется в напряжение U
1
, которое через дифференцирующий кон-
тур, состоящий из емкости С и сопротивлением R
1
и R
2
подается на
вход усилителя У. Усиленный усилителем ток поступает на обмотку воз-
буждения генератора Г, цепь якоря которого последовательно соедине-
на с цепью якоря двигателя Д, который через редуктор Р поворачивает
выходной вал управляемого объекта УО на угол β = K
0
α.
Если α
1
= α, то сигнала рассогласования нет, двигатель обесточен и
вращения вала двигателя не будет.
Следящая система описывается следующей системой дифференци-
альных уравнений:
уравнение управляемого объекта с двигателем в операторной форме
(T
1
S + 1) Sβ = K
1
I
2
- f (t);
уравнение обратной связи
α
1
= 1/K
0
β;
уравнение датчика рассогласования
γ = α − α
1
;
уравнение потенциометра
U
1
= K
2
γ;
уравнение дифференцирующего контура
(T
2
S + 1)U
2
= K
3
(T
5
S + 1)U
1
,
где T
2
= (СR
1
R
2
)/(R
1
+ R
2
); T
5
= R
1
С ; K
3
= R
2
/(R
1
+R
2
).
Постоянная времени T
2
определяет методическую ошибку системы
при дифференцировании.