Таранчук А.И. Адаптивные системы управления. Программа и методические указания к выполнению лабораторных работ
Подождите немного. Документ загружается.

1
Лабораторная работа № 1
ИССЛЕДОВАНИЕ БЕСПОИСКОВОЙ
САМОНАСТРАИВАЮЩЕЙСЯ СИСТЕМЫ (БСС)
С ИНВЕРСНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ В ОБРАТНОЙ СВЯЗИ
Цель работы: 1. Моделирование БСС с помощью пакета
“Simulink”. 2. Определение динамических параметров системы.
3. Оценивание работоспособности БСС при наличии помех.
1. Краткое математическое описание БСС
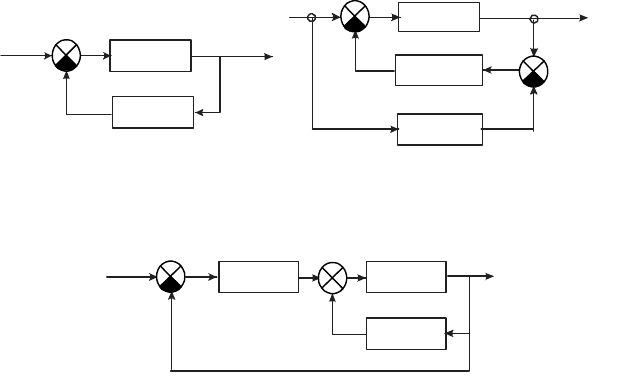
Известны различные способы использования эталонных моделей
в БСС. Рассмотрим некоторые структуры таких систем с эталонной
моделью, которые теоретически могут обеспечить требуемое качество
управления нестационарными объектами [4, с. 38–42]:
– системы с инверсной моделью в обратной связи (рис. 1);
– системы с эталонной моделью, включенной параллельно основ%
ному контуру (рис. 2);
– системы с эталонной моделью в прямой цепи регулятора (рис. 3);
– системы с эталонной моделью, включенной параллельно неко%
торым функционально необходимым элементам основного контура
управления (рис. 4).
O
ao
KW(S)
W
k
(S)
O
au o
W(S)
O
au o
(t)O
ao
(t)
W
i
(S)
K
k
W
k
(S)
Рис. 1 Рис. 2
W
i
KW(S)
W
k
(S)
O
au o
(S)
O
ao
(S)
Рис. 3
2
Все указанные БСС характеризуются двухтемповыми движения%
ми, причем при соответствующем выборе параметров управляющей
части с изменением переменных параметров объекта у них изменя%
ются характеристики “быстрых” порционных движений.
Исследование таких систем производится прямым модифициро%
ванным методом “замороженных коэффициентов” [4, с. 13–20].
Рассмотрим исследуемую БСС (рис. 1).
Предположим, что передаточная функция прямой (разомкнутой)
цепи системы имеет вид
K W (s) = KW
1
(s) W
2
(s) W
3
(s) W
0
, (1)
где W
1
(s), W
2
(s), W
3
(s) – передаточные функции функционально не%
обходимых элементов; W
0
(s) = W
0
(s, t) – “замороженная” передаточ%
ная функция объекта с переменными параметрами; W
м
(s) – инверс%
ная модель.
Тогда передаточная функция замкнутой системы – с моделью:
X
вых
/ X
вх
= K W (s) / (1 + K W (s) W
м
(s). (2)
Из выражения (2) следует, что при K ® ¥
X
вых
/ X
вх
@ 1/W
м
(s), (3)
т.е. влияние объекта с переменными параметрами на показатели ка%
чества управления исключается.
При проектировании БСС модель выбирается так, чтобы показа%
тели качества систем управления удовлетворяли заданным требова%
ниям.
Но при K ® ¥ мы вступаем в противоречие с устойчивостью анали%
зируемой системы. Устойчивость системы оценивается знаменателем
передаточной функции замкнутой системы (2):
1 + KW(s) W
м
(s).
Поэтому, в реальных условиях значение K выбирается конечным
из условий удовлетворения заданным требованиям качества.
Перепишем выражение (2), домножив и разделив на W
м
(s)
Рис.4
O
au o
(S)O
ao
(S)
K
1
K
2
W
i
(S)
W
k
(S)
W
0
(S)
K
k
W
3

3
X
вых
/
X
вх
= KW(s) W
м
(s) / (1 + K W(s)W
м
(s)) W
м
(s). (4)
Условно систему управления можно представить в виде последо%
вательно соединенной следящей системы с передаточной функцией
W
с
(s) = K W (s)W
м
(s) /(1 + KW(s)W
м
(s))
инверсной модели 1/ W
м
(s).
Объект с переменными параметрами входит в W
c
(s).
Выберем коэффициент передачи K из условия, что минимальное
быстродействие следящей системы будет хотя бы на порядок выше
быстродействия инверсной модели 1/W
м
(s).
Предположим, что в выражении (1)
W
1
(s) = K
1
; W
2
(s) = 1; W
3
(s) = A
3
/ B
3
(s);
W
0
(s, t) = K
0
(t) b
0
(t) / B
0
(s, t) ,
тогда в выражении для W
c
(s) знаменатель функции запишется в виде:
1 + [K
1
А
3
KK(t)b
0
(t) / B
3
(s)B
0
(s, t)] W
м
(s) =
= [B
3
(s)B
0
(S) + K
1
KK
0
(t)b
0
(t)] W
м
(s) / B
3
(s)B
0
(s, t). (5)
Очевидно, что в (5) полином B
3
(s)B
0
(s,t) имеет степень n – поря%
док уравнения объекта.
Технически задача синтеза системы решается проще:
1. Выберем модель, описанную полиномом первой или второй сте%
пени, так чтобы инверсная модель, в основном, удовлетворяла тре%
бованиям качества;
2. Введем дополнительные корректирующие устройства, охваты%
вающие функционально необходимые элементы регулятора, для обес%
печения устойчивости W
c
(s).
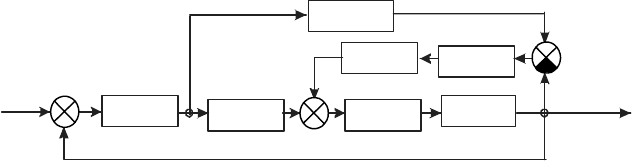
Из указанных соображений структура системы будет представле%
на в виде, показанном на рис. 5.
K
7
W
i
(S) K
2
W
3
(S) W
0
(S,t) 1/W
i
(S)
W
k3
(S)
W
k2
(S)
X
au o
X
ao
Рис. 5
На рис. 5 приняты следующие обозначения:
W
k2
(s) = A
k2
(s)/ B
k2
(s); W
k3
(s) = A
k3
(s)/ B
k3
(s);
W
м
(s) = C
1
S + 1.
4
Передаточная функция замкнутой системы имеет вид
Х
вых
/
Х
вх
= W
м
(s) K
1
K W
3
(s) W
0
(s, t) /[1 + W
м
(s)K
1
K·
·W
3
(s)W
0
(s,t) + KW
k2
(s) + KW
3
(s)W
k3
(s)] ·1/W
м
(s). (6)
Из (6) следует, что устойчивость системы (6) можно исследовать с
помощью знаменателя передаточной функции замкнутой системы,
приравняв его нулю
1 + W
м
(s)K
1
KW
3
(s)W
0
(s,t) + KW
k2
(s) + KW
k3
(s)W
3
(s) = 0. (7)
Выбором корректирующих устройств можно обеспечить низкую
чувствительность системы к переменным параметрам объекта.
Это реализуется за счет расширения полосы пропускания частот,
но это приводит к уменьшению помехозащищенности САУ.
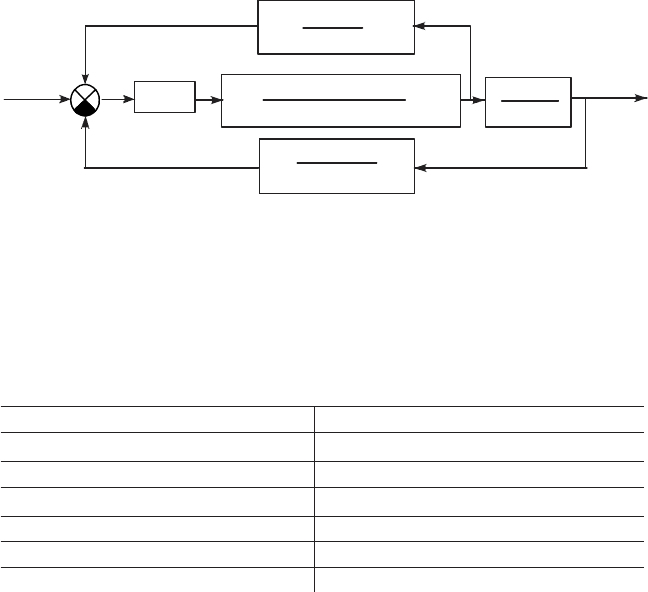
2. Порядок выполнения работы
Структурная схема системы с инверсной моделью представлена на
рис. 6.
K
k1
S
T
k1
S+1
K
2
(T
1
S+1)(T
2
S+1)
X
au o
X
ao
K
1
T
3
S+1
T
k1
S+1
K(t)
T
1
S+1
Рис. 6
Исходные данные для моделирования, не указанные на структур%
ной схеме, имеют следующие значения:
K
1
= 2000; K
2
= 1; K
k1
= 0,0012; Т
1
= 0,2;
T
2
= 0,005; T
k1
= 0,0001; Т
3
= 0,1.
Варианты значений K(t) приведены в табл.1.
Таблица 1
тнаираВ
K(t)
15,0
20,1
30,3
40,6
50,8
60,01
5
Показатели качества управления приведены в табл.2.
Таблица 2
тнаираВ
t
р
с,
r %, d
татс
1082,05,40
2582,00,40
3092,05,30
4292,00,30
5592,05,20
6003,00,20
В соответствии с указанным преподавателем вариантом построим
структурную схему системы, приведенную на рис. 6.
Используя пакет прикладных программ «Simulink» наберем по%
лученную структурную схему на ПЭВМ.
В передаточных функциях “Transfer F
сп
” в числитель и знамена%
тель вводим параметры, соответствующие исходным данным для
моделирования.
“Возмущение” f
1
(t) задаем в виде скачка “Step”, регулируемый курс
самолета DY регистрируется с помощью графопостроителя – “Scope”.
Постоянные коэффициенты передачи устанавливаются с помощью
блоков “Gain”.
Соединение блоков (звеньев), входящих в систему управления,
осуществляется в соответствии со структурной схемой по рассмот%
ренным ранее рекомендациям.
После соединения блоков на рабочем поле ПЭВМ получается ис%
ходная модель.
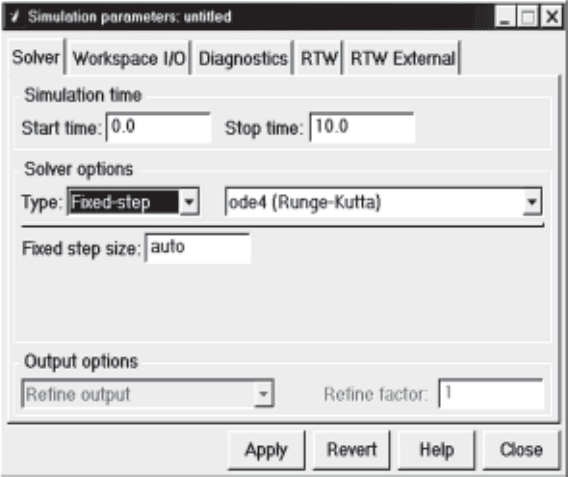
Перед моделированием необходимо установить параметры моде%
лирования. Для этого обратимся к меню Simulation и выберем пункт
Parameters. На экране появится диалоговое окно следующего вида
(рис. 7), которое позволяет изменить начальное время моделирова%
ния (Start time), конечное время моделирования (Stop time), выбрать
алгоритм моделирования с переменным шагом (Variable%step) или с
постоянным шагом (Fixed%step), метод моделирования. Если выбран
постоянный шаг интегрирования, то следует задать его величину или
записать команду auto для автоматического выбора шага програм%
мой. При выборе переменного шага интегрирования нужно задать
абсолютную (Absolute) и относительную (Relative) погрешность. За%
дание параметров моделирования является этапом решения задачи,
зависит от типа системы управления, обсуждается в специальных
курсах, а также в учебном пособии [3].
6
Подробное описание всех настроек диалогового окна Parameters
можно получить, нажав клавишу Help.
Для выполнения моделирования можно выбрать пункт Start из
меню Simulation или нажать кнопку 4.
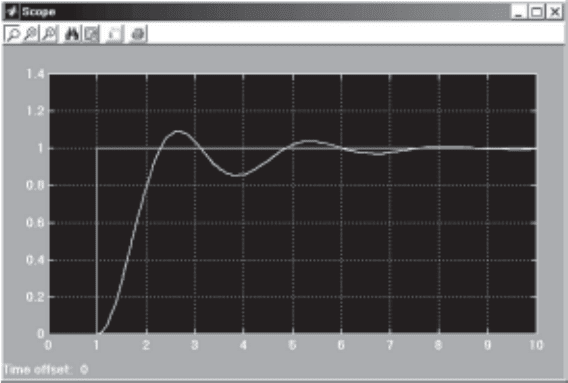
Для вывода на экран графиков переходных процессов необходимо
2 раза щелкнуть по блоку Графопостроитель. В результате появля%
ется окно (рис. 8), содержащее ступенчатое возмущение и реакцию
на него системы управления.
Если переходных процессов на экране нет, то следует нажать кноп%
ку автомасштабирования (изображен бинокль). Для получения ко%
пии процессов на бумаге следует нажать кнопку с изображением прин%
тера. Для изменения свойств графика можно нажать кнопку
Properties (слева от кнопки принтера) и воспользоваться появившим%
ся диалоговым окном.
Для увеличения любого фрагмента графика до размеров окна мож%
но выделить фрагмент нажатием левой кнопки мыши и передвиже%
нием ее по экрану. В результате интересующий нас фрагмент должен
быть обведен прямоугольником. После отпускания кнопки фрагмент
увеличивается. Вернуться к исходному размеру можно воспользовав%
Рис.7
7
шись кнопкой автомасштабирования. Дополнительную информацию
по программе Simulink можно получить из электронного учебника
(на русском языке), из рассмотрения демонстрационных схем, обра%
титься к которым можно из блока Demo библиотеки блоков и из боль%
шого набора схем, доступ к которым осуществляется из блока
Blocksets & Toolboxes библиотеки блоков.
С помощью полученного переходного процесса определим:
– t
р
– время регулирования, с;
– r – перерегулирование, %;
– d
стат
– величина статической ошибки.
Полученные значения не должны превышать параметры для со%
ответствующего варианта (табл. 2).
3. Оценка работоспособности системы при наличии помех
Пусть на входе системы действует помеха. Необходимо оценить
работоспособность системы при ее наличии с учетом нелинейности в
виде “насыщения” в приводе.
Пусть
X
вых
(t) = X
вх max
(t) + X
вх.пом
(t), (8)
где X
вх max
(t) – полезный сигнал; X
вх.пом
(t)= X
пом 1 max
· sin w
п
t –
помеха.
Рис.8
8
Значения X
пом 1,2 max
и w
п
заданы в табл. 3.
Таблица 3
тнаираВ
X
xam1.моп
w
п
дар,
X
xam2моп
1050,000020051
2010,000910061
3510,000810071
4020,000710081
5520,000610091
6030,000510002
Приближенно на вход привода эта помеха будет поступать с коэф%
фициентом передачи
K
1
= X
пр
/ X
вх
= 2000.
Тогда
[X
пр]
@ K
1
· X
пом1 max
. (9)
Пусть с датчика, измеряющего выходную координату объекта,
поступает помеха, как и на входе системы:
X
вых.пом
(t) = X
пом2 max
· sin w
п
t . (10)
Тогда отношение
X
пр
/
X
вых.пом
@ K
1
(T
3
S +1) / (T
k1
S +1) , (11)
а
[X
пр
]
max
@ K
1
·X
пом2 max
. (12)
Если привод входит в насыщение при [X
пр
] < [X
пр
]
max
, то рас%
сматриваемая система будет практически неработоспособна.
4. Содержание отчета по лабораторной работе
Отчет должен содержать:
– уравнения адаптивной системы с инверсной моделью;
– исходные данные для моделирования;
– структурную схему системы;
– исходную модель системы;
– графики переходных процессов;
– расчеты по оценке работоспособности системы;
– выводы по работе.
9
Лабораторная работа №2
ИССЛЕДОВАНИЕ МОДАЛЬНОГО РЕГУЛЯТОРА
ПРИ НАЛИЧИИ ПОЛНОЙ ИНФОРМАЦИИ О ВЕКТОРЕ
СОСТОЯНИЯ В АДАПТИВНОЙ СИСТЕМЕ
Цель работы: 1. Построение модального регулятора. 2. Модели%
рование системы с помощью пакета «Simulink». 3. Определение ди%
намических параметров системы.
1. Краткое описание процедуры синтеза модального регулятора
Рассмотрим продольное движение летательного аппарата вокруг
центра масс, характеризующееся углом атаки a, угловой скоростью
w
z
и углом тангажа q .
Движение ЛА описывается следующими уравнениями :
a = –a
11
a –a
13
w
z
– b
11
d
B
,
q = –a
23
w
z
,
w
z
= –a
31
a –a
32
q –a
33
w
z
–b
31
d
B
, (13)
где
В
1
– отклонение соответствующего руля ЛА.
В итоге полная система уравнения для продольного движения ЛА
примет вид
12 12 12
,Хt AXt BUt34
12 12
,Yt CXt3
(14)
где
11 13
23
31 32 33
0
00 ;
aa
a
aaa
11
21
111
A
11
31
0;
b
b
1B
12
,, .
T
Z
Xt34 5 6
В силу того что мы имеем полную информацию о векторе состояния
1, 1, 1.1С
Для построения модального регулятора необходимо установить,
управляема ли система?
10
Матрица управляемости будет выглядеть
2
,, .BABAB1N
(15)
Используются исходные данные (табл. 4), оставляется матрица
N и определяется ее ранг.
Если ранг N равен порядку уравнения (n = 3), то, следовательно,
система управляема.
Выяснив, что система управляема, можно приступить к созданию
модального регулятора. Среди известных принципов построения си%
стем управления наибольшее распространение получил принцип уп%
равления по отклонению, т. е. принцип обратной связи.
Для построения регулятора будем исходить из того, что имеется
полная информация о векторе состояния системы, т. е.
1
1.
1
T
1C
Таким образом, для построения регулятора необходимо опреде%
лить матрицу коэффициентов обратной связи K.
Из матрицы А определим характеристический полином регулятора
1
2
3
4
рег
:.ррЕА567
Для этого воспользуемся первым уравнением системы (14)
,XAXBU12
или
1
2
.pE A X BU34
(16)
Откуда
12
1
.XpEA BU34
(17)
С учетом (13) из уравнения (16) следует, что
12
34
12
12
11 13
23
31 32 33
0
00 .
ра а
ррЕА р а
аара
55
6757 5 5
55 5
(18)
Откуда
12
32
123
,ррbpbpb345 55 (19)