Сырбаков А.П., Корчуганова М.А. Диагностика и техническое обслуживание
Подождите немного. Документ загружается.

41
Рис. 4.3. Тяговая характеристика Т-150 на стерне
Для расчета навесного пахотного агрегата необходимо:
1. Определить число корпусов плуга, округляя полученные значе-
ния до целых чисел в сторону уменьшения:
ifgbak
P
m
gплk0
kpi
Ki
,
где g
пл
– масса плуга, приходящаяся на один корпус, Н; для 4–6 кор-
пусных плугов g
пл
= 1,6–2 кН, 8–9-корпусных g
пл
= 2,4–3,1 кН;
b
k
– ширина захвата одного корпуса, м.
42
2. Определить конструктивную ширину захвата плуга:
B
пл i
=
m
Ki
b
k
, м.
3. Определить тяговое сопротивление плуга:
R
пл i
= k
0
a B
пл i
+ G
пл i
(
g
f i).
4. Определить коэффициент использования тягового усилия па-
хотного агрегата:
iкрiплiи
PR
.
Для соответствующего технологического процесса выбираем ту
передачу трактора, на которой достигается наибольшее допустимое зна-
чение коэффициента использования тягового усилия (табл. 4.1).
Расчет тягово-приводного агрегата
При агрегатировании тягово-приводных машин мощность, разви-
ваемая тракторным двигателем, распределяется по двум направлениям:
1) через ВОМ трактора к рабочей машине для привода в движение
рабочих органов;
2) через ходовой аппарат трактора для перемещения агрегата.
Расчет такого агрегата заключается в следующем:
1. Определить общее сопротивление прицепной части агрегата:
R
np i
= R
f
+ R
+ R
g i
, Н,
где R
f
– сопротивление на перекатывание машин, Н; R
f
= G
м
f
м
;
R – сопротивление подъему, Н; R = G
м
i;
R
gi
– дополнительное сопротивление на привод рабочих органов.
2. Определить дополнительное сопротивление:
ВОМip
ТРпр
ig
V
N3600
R
,
где N
пр
– мощность, необходимая для привода рабочих орга-
нов от вала отбора мощности,
N
пр
≤ N
ВОМ
, кВт.
43
Таблица 4.1
Допустимые значения коэффициента использования тягового усилия на
основных видах работ
Операция
Класс трактора, т
0,9
1,4
3,0
4,0
5,0
1. Вспашка легких и средних почв
0,90
0,90
0,93
0,94
0,92
2. Вспашка тяжелых почв
-
-
0,90
0,90
0,88
3. Вспашка уплотненных, пересохших
почв
-
-
0,80
0,80
0,78
4. Культивация сплошная
0,78
0,80
0,92
0,93
0,92
5. Боронование
0,84
0,85
0,93
0,95
0,94
6. Плоскорезная обработка
-
-
0,90
0,92
0,90
7. Лущение
0,92
0,92
0,94
0,96
0,94
8. Посев зерновых
0,93
0,94
0,95
0,96
0,95
3. Определить затраты мощности на привод рабочих органов:
N
пр
= N
у
q
м
, кВт,
где N
у
– удельная мощность, кВт с/кг (табл. 10);
q
м
– секундная подача обрабатываемого материала.
4. Определить секундную подачу массы:
g
м i
= B
p i
V
p i
U, кг/с,
где В
р
– рабочая ширина захвата агрегата, м:
В
р
=
ш
В
к
,
где
ш
– коэффициент использования ширины захвата;
U – урожайность или норма внесения материала, кг/м
2
;
V
р
– рабочая скорость движения, м/с.
44
Таблица 4.2
Примерные значения удельной мощности, N
у
, кВт
Наименование машины
Величина N
y
, кВт
1. Комбайн
силосоуборочный
1,8 – 2,5
картофелеуборочный
7,4 – 12,5
льноуборочный
13,2 – 16,4
свеклоуборочный
4,0 – 9,0
2. Корнеуборочная машина
10,0 – 15,0
3. Ботвоуборочная машина
3,4 – 5,3
4. Жатка валковая
2,7 – 3,8
5. Пресс-подборщик
14,7 – 15,6
5. Определить коэффициент использования тягового усилия:
u i
= R
np i
/ P
kp i
.
После определения
ui
выбираем наиболее рациональную переда-
чу трактора.
Скоростной режим работы агрегата
Скоростной режим МТА на полевых сельскохозяйственных рабо-
тах определяется поступательной скоростью движения трактора и явля-
ется одним из важнейших факторов, влияющих на качество и количест-
во выполняемой работы.
Различают теоретическую V
т
, рабочую V
Р
, среднетехническую
V
тех
и эксплуатационную V
э
.
Теоретическая скорость движения на данной передаче определя-
ется по формуле:
V
т
= 22,6 r
k
n
д
/ i
т
, км/ч.
Рабочая скорость учитывает потери из-за буксования и она равна:
V
р
= V
т
(1 – , км/ч.
Среднетехническая скорость движения определяется отношением
суммарного пройденного пути на общее время движения:
V
тех
= (S
p
+ S
x
) / (T
p
+ T
x
), км/ч.
45
Эксплуатационная скорость движения определяется отношением
пройденного пути на время смены:
V
э
= (S
p
+ S
x
) / Т
см
, км/ч,
где S
р
, S
x
, Т
см
– суммарная длина рабочего и холостого хода и
время смены.
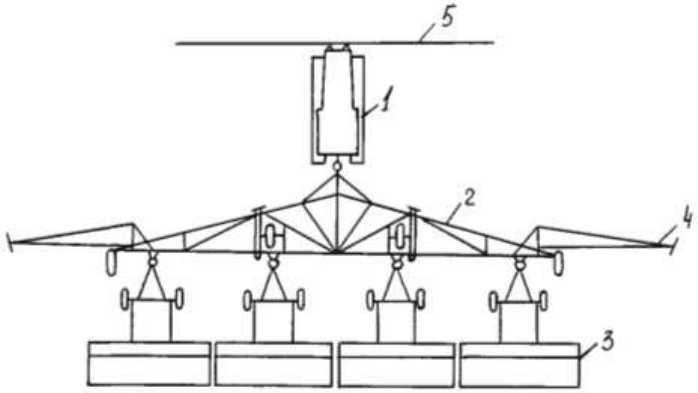
Сцепные устройства для составления многомашинных агрегатов
При составлении многомашинных агрегатов с энергонасыщенны-
ми тракторами возникает необходимость в использовании промежуточ-
ных вспомогательных сцепных устройств – сцепок (рис. 4.4). Сцепка
передает движущее усилие, развиваемое трактором, прицепным маши-
нам.
Рис. 4.4. Схема четырехсеялочного посевного агрегата Т-4А + СП-16А
+ 4·СЗП-3,6: 1 – трактор, 2 – сцепка, 3 – сеялка, 4 – маркер, 5 – следоуказатель
Каждая сцепка должна удовлетворять следующим требованиям:
– соответствовать агротехническим требованиям;
– обеспечивать полное использование захвата сельскохозяйствен-
ных машин;
– позволять присоединять количество машин, обеспечивающих
полное использование тяговой мощности трактора.
По своему устройству сцепки подразделяются на следующие ти-
пы:
– универсальные, предназначенные для соединения различных
симметричных машин;
– специальные, предназначенные для соединения определенного
46
типа несимметричных машин.
По способу соединения с трактором или машиной сцепки могут
быть прицепные, навесные и полунавесные.
Сцепка при своем перемещении создает сопротивление, которое
определяется по формуле (см. выше), в свою очередь, ширина сцепки
характеризуется фронтом, который определяется по выражению
(см. выше).
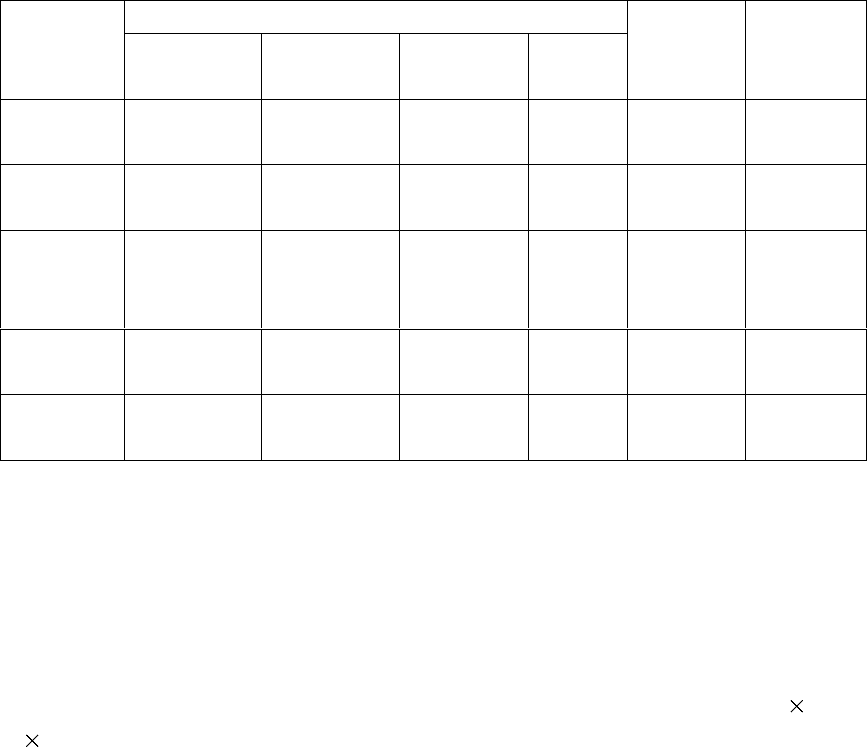
В таблице 4.3 приведена краткая характеристика сцепок.
Таблица 4.3
Краткая техническая характеристика сцепок
Марка
Ширина захвата (фронт), м
Масса,
кН
Класс
трактора
боронова-
ние
культива-
ция
прикаты-
вание
посев
СП-11А
-
7,04
-
10,25
1110
1,4; 3,0
СП-16А
-
До 16,6
-
до 15,2
2360
3; 4; 5
СГ-21А
15,7
-
15,7
-
3400
3; 4;
20,6
-
-
-
3800
5
СГ-21Б
20,6
-
21
-
1980
3; 4; 5
С-11У
12,0
-
-
-
750
1,4; 3
Технологическая наладка агрегатов и их оценка
Технологическая наладка включает комплекс регулировочно-
наладочных операций (установка рабочих органов на заданную глубину
обработки, высева семян, удобрений, высоты среза, полноты вымолачи-
вания и др.) в соответствии с агротехническими требованиями.
Для технологической наладки машин на машинном дворе в каждой
бригаде необходимо иметь регулировочную площадку размером 6 6 или
12 6 м. Площадки должны иметь твердое покрытие, монорельс с талью
грузоподъемностью 3–5 т. Размещать площадку необходимо вблизи от
мастерской ПТО.
Регулировочную площадку укомплектовывают необходимым на-
бором подкладок для установки рабочих органов на заданную глубину
обработки почвы, разметочных досок, шаблонов для проверки правиль-
ности формы и размеров лемехов и культиваторных лап, металлических
линеек различной длины, рулеток, шнуров и др.
47
5. КИНЕМАТИКА АГРЕГАТОВ. СПОСОБЫ ДВИЖЕНИЯ
АГРЕГАТОВ
Кинематические характеристики рабочего участка и агрегата
Машинно-тракторный агрегат в процессе работы перемещается по
полю, проходя за смену значительные расстояния, измеряемые часто
многими десятками километров. Пройденный агрегатом путь состоит из
рабочих ходов и холостых поворотов с выключенными рабочими органа-
ми. При этом желательно, чтобы холостой путь агрегата и соответствую-
щие потери времени смены, а также непроизводительный расход топлива
были как можно меньше.
Под кинематикой агрегата понимают его движение при выполне-
нии сельскохозяйственных процессов.
Закономерность циклично повторяющихся элементов движения
называется способом движения агрегата. Путь агрегата при выполнении
полевых работ состоит из прямолинейных отрезков и поворотов вокруг
некоторых центров.
Кинематические характеристики рабочего участка
Подготовка полей в зависимости от выбранного способа движения
предусматривает комплекс операций по разбивке поля на загоны требуе-
мой формы и размера, обеспечивающие высокое качество технологическо-
го процесса и высокую производительность при возможно меньших затра-
тах ресурсов.
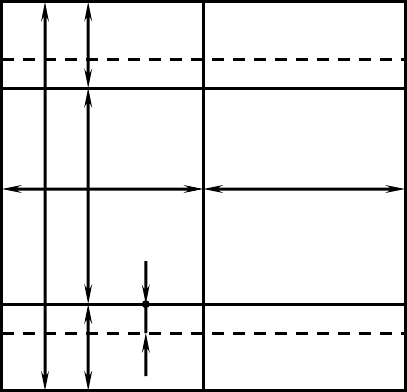
Часть или все поле, отведенное для выполнения определенной
сельскохозяйственной работы одному или нескольким агрегатам, назы-
вается рабочим участком (рис. 5.1).
Часть рабочего участка, временно выделенная для работы одного
агрегата, называется загоном, ширина которого равна С.
Таким образом, к кинематическим характеристикам рабочего уча-
стка относятся: длина гона L, рабчая дина гона Lр, ширина поворот-
ной полосы Е и длина выезда агрегата е. Рабочую длину гона можно
определить по выражению Lр = L – 2Е.
Кинематические характеристики агрегата
Повороты представляют собой более сложные элементы движе-
ния, и при этом агрегат движется по кривой. Отдельные точки агрегатов
при поворотах описывают свои траектории, причем линейные скорости
их изменяются в зависимости от расстояния до центра поворота
(рис. 5.2).
Точка агрегата (о), траектория которой при расчетах принимается
для определения кинематики всех других его точек, называется кинема-
48
С
С
Е
Е
L
L
p
e
e
тическим центром агрегата, или просто центром агрегата, Ц
а
.
Основные кинематические характеристики МТА зависят от конст-
руктивных особенностей трактора, сцепки и рабочих машин. К таким
характеристикам агрегата относятся: кинематическая длина, кинемати-
ческая ширина, длина выезда, радиус и центр поворота, продольная база
трактора, ширина колеи, ширина захвата.
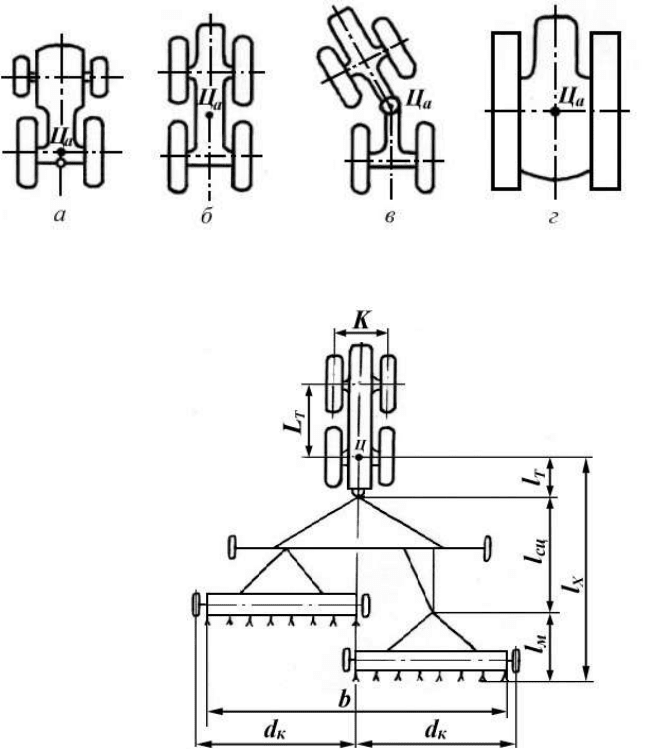
Для агрегатов, составляемых на базе колесных тракторов с жест-
кой рамой и одной ведущей осью, точка Ц
а
определяется как проекция
середины задней ведущей оси трактора на плоскость движения (см. рис.
5.2, а). При двух ведущих осях с управляемыми колесами центром аг-
регата будет проекция на эту же плоскость середины прямой, соеди-
няющей середины ведущих осей (см. рис. 5.2, б). У агрегатов с тракто-
рами, имеющими шарнирно сочлененную раму, за центр агрегата
принимается проекция на плоскость движения центра шарнира (см. рис.
5.2, в). Для МТА с гусеничными тракторами центр агрегата соответст-
вует центру давления, находящемуся на пересечении продольной оси
симметрии гусеничного хода с прямой, соединяющей середины опор-
ных частей гусениц (см. рис. 5.2, г).
При решении задач кинематики траектория центра агрегата ус-
ловно принимается как траектория всего агрегата.
Кинематической длиной агрегата ℓ
к
называется проекция рас-
стояния между центром агрегата и линией, перпендикулярной продоль-
ной оси трактора и проходящей через наиболее удаленные по ходу МТА
точки рабочих органов машин при прямолинейном движении (рис. 5.3).
Рис. 5.1. Кинематические характеристики рабочего участка
49
Рис. 5.2. Основные схемы расположения центра агрегата
Рис. 5.3. Схема для определения кинематической длины агрегата
Как видно из рисунка 5.3, кинематическая длина ℓ
к
агрегата скла-
дывается из кинематической длины ℓ
т
трактора, ℓ
c
сцепки и ℓ
м
рабо-
чей машины:
ℓ
к
= ℓ
т
+ ℓ
c
+ ℓ
м
, м.
Длина выезда агрегата определяется как расстояние, на которое
перемещается центр агрегата от контрольной линии по ходу движения
перед началом и в конце поворота. Величина е пропорциональна кине-
матической длине агрегата и равна в среднем е = 0,5 ℓ
к
для большинст-
ва агрегатов.
Кинематическая ширина агрегата d
к
– проекция расстояния между
продольной осью агрегата, проходящей через его центр, и наиболее уда-
ленной от этой оси точкой агрегата, движущейся по полю. Размечают d
к
вправо и влево от продольной оси МТА.
Радиус поворота агрегата R
n
(рис. 5.4) определяется как расстоя-
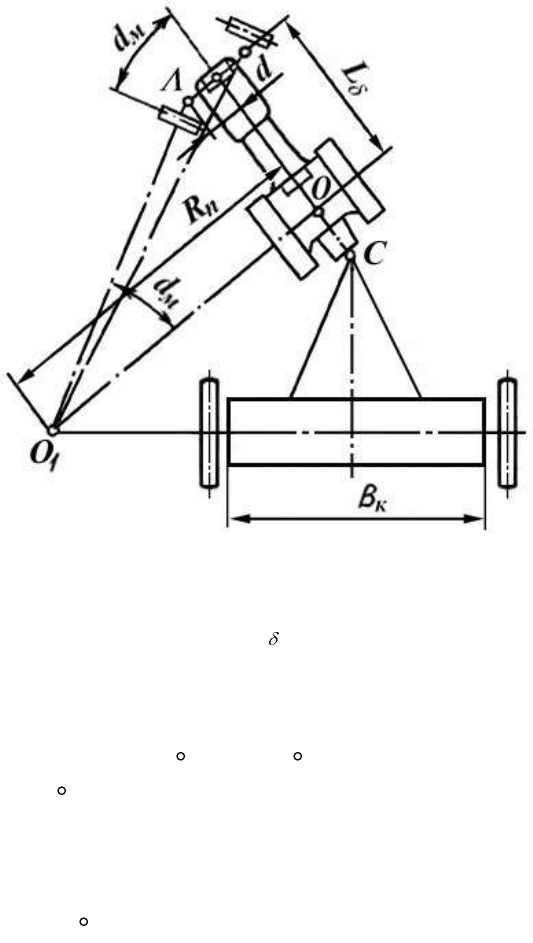
50
ние от центра агрегата Ц
а
до центра поворота О. Обычно при повороте
МТА центр агрегата перемещается не по окружности, а по дуге более
сложной формы. При эксплуатационных расчетах принимают среднее
значение R
n
с учетом возможной поправки на скорость МТА.
Рис. 5.4. Схема для определения радиуса поворота агрегата
На рис. 5.4 дополнительно показаны такие кинематические пока-
затели агрегата, как продольная база L трактора и конструктивная ши-
рина захвата В
к
МТА.
Основные виды поворотов агрегатов
Основными видами поворотов, которые применяются при работе
МТА, являются повороты на 90 и на 180 .
Повороты на 90 совершаются как при холостых заездах с выклю-
ченными орудиями, так и при выполнении рабочих ходов способом дви-
жения вкруговую. О длине пути на поворотах судят по траектории центра
агрегата.
Повороты на 180 выполняются главным образом при холостых
заездах на концах загонов во время работы агрегата гоновыми и диаго-
нальными способами движения.
В зависимости от расстояния между рабочими ходами агрегата за-
езды при поворотах бывают петлевые и беспетлевые. Петлевые повороты
по своей форме могут быть грушевидные, восьмеркообразные и грибо-
видные (рис. 5.5).
Важнейшие кинематические характеристики всех поворотов: дли-