Слепов Н.Н. Современные технологии Цифровых оптоволоконных сетей связи (ATM, PDH, SDH, SONET и WDM)
Подождите немного. Документ загружается.


Глава 5
Синхронизация цифровых сетей
176
Глава 5
Синхронизация Цифровых сетей
Проблема синхронизации цифровых сетей является частью общей проблемы синхрониза-
ции последовательностей, известной с момента использования ИКМ и плезиохронной цифровой
иерархии PDH. Рассмотрим некоторые основные понятия, которыми оперируют при описании
проблем синхронизации и методов их решения. Они будут полезны как при выборе оборудования
SDH и проектировании сетей SDH в целом, так и при решении вопросов построения практиче-
ских сетей синхронизации.
5.1 Основные понятия
Если цифровая сеть локальна, т.е. её узлы близки друг к другу настолько, что можно пренебречь
временем распространения сигнала между ними, и проста, т.е. имеет несколько узлов с тополо-
гией звезда, а на центральном её узле стоит общий источник тактовой сетевой синхронизации
(ТСС), такты которого передаются без запаздывания на все периферийные узлы, то для такой
“идеальной” сети проблемы синхронизации отсутствуют. Они возникают тогда, когда несколько
таких сетей (каждая со своим источником синхронизации) объединяются в одну сложную сеть.
Для её синхронизации в целом нужно, чтобы точность источников тактовой синхронизации от-
дельных сетей была одинаковой и высокой (1·10
-11
- 1·10
-12
), или чтобы для этой новой сети была
построена специальная сеть распространения сигнала синхронизации с единым высокоста-
бильным источником тактовой синхронизации.
Если эти условия не соблюдаются и существует разница в частотах источников тактовой
синхронизации (хронирующих источников или таймеров) на передающем и принимающем уз-
лах, то происходит накапливание за определённое время разности фаз принимаемой на узле циф-
ровой последовательности и последовательности, генерируемой источником тактовой синхрони-
зации данного (принимающего) узла. Эта разность может стать соизмеримой с длиной тактового
интервала. В этот момент может произойти срыв синхронизации, вызванный либо пропаданием
одного импульса (тактового интервала), либо формирование лишнего импульса (тактового интер-
вала).
Это явление называют “проскальзыванием”, или “слипом” (slip). Субъективно слипы
приводят к появлению щелчков при передаче голоса или радиовещании, объективно это ведёт к
увеличению числа ошибок в синхронных сетях при передаче данных. Качество синхронизации в
этом случае может быть оценено периодом времени, за который накопленная разность фаз приво-
дит к срыву фреймовой синхронизации, или частотой проскальзывания (слипов) в единицу вре-
мени (минута, час, сутки).
Учитывая, что сеть в общем случае может состоять из нескольких участков, синхронизи-
руемых от таймеров различной точности, важно иметь, с одной стороны, предельные значения
частоты слипов (нормы), регламентируемые стандартами в целях обеспечения определённого ка-
чества синхронизации (или качества обслуживания), с другой стороны - статистику слипов, воз-
никающих при взаимодействии между участками сети с установленными на них таймерами раз-
личной точности. Для такой статистики, в свою очередь, нужна привязка к какой-то системе клас-
сификации таймеров по точности (классам), чтобы сделать объем этой статистики представитель-
ным и ограниченным, привязанным к этим самым классам.
5.2. Стандарты и нормы синхронизации цифровых сетей связи
Общие вопросы синхронизации, описаны в рекомендации ITU-T Rec. G.810 [116], они актуальны

Глава 5
Синхронизация цифровых сетей
177
как для плезиохронных, так и для синхронных сетей.
Глава 5
Синхронизация цифровых сетей
178
Цель синхронизация - получить минимально возможное число слипов за выбранный ин-
тервал времени. Это равносильно установке наилучшего возможного хронирующего источника,
или таймера, на всех узлах сети. Эту задачу можно упростить до эквивалентной задачи: установки
одного высокоточного таймера в одном из центральных узлов сети (например, в центральном
офисе) и трансляции его показаний в другие узлы сети (аналогично тому, как это делается, на-
пример, службой времени большого города). Для этого нужно не только иметь высокоточный
таймер, но и надежную систему распределения сигнала синхронизации на все узлы сети.
Система такого распределения основана обычно на иерархической схеме, заключающейся
в создании ряда базовых точек, где находится первичный эталонный генератор тактовых им-
пульсов PRC (ПЭГ), или первичный таймер, сигналы которого затем распределяются по сети,
создавая вторичные источники - вторичный или ведомый эталонный генератор тактовых им-
пульсов SRC (ВЭГ), или вторичный таймер, реализуемый либо виде таймера транзитного
узла TNC, либо таймера локального (местного) узда LNC.
Первичный таймер PRC обычно представляет собой хронирующий атомный источник
тактовых импульсов (цезиевые или рубидиевые часы) с точностью не хуже 10
-11
. Он калибруется
вручную или автоматически по сигналам с датчиков мирового координированного времени UTC
[117]. Сигналы таймера PRC затем распространяются по наземным линиям связи для реализации
того или иного метода узловой синхронизации.
5.2.1. Стандартный подход к решению задачи синхронизации
Существуют два основных метода узловой синхронизации [116]: иерархический метод принуди-
тельной синхронизации с парами таймеров: ведущий-ведомый, и неиерархический метод вза-
имной синхронизации. Оба метода могут использоваться отдельно и в комбинации, однако, как
показывает практика, широко используется только первый метод. Этот метод (в качестве единст-
венного) принят и на Взаимоувязанной сети связи (ВСС) РФ [137,160].
Для надежной синхронизации, мультиплексоры плезиохронных и синхронных сетей PDH
и SDH должны иметь несколько дублирующих источников синхронизации, например:
- сигнал внешнего сетевого таймера;
- сигнал с трибного интерфейса канала доступа;
- сигнал внутреннего таймера;
Дополнительно к этому могут использоваться другие источники сигналов синхронизации
например, 8 и 64 кГц для систем PDH, линейные сигналы STM-N систем SDH (см. ниже), опор-
ные сигналы 1, 5, 10 МГц для внутренних таймеров.
5.2.2. Стандартные режимы работы хронирующего источника
Стандарты предусматривают четыре режима работы хронирующих источников узлов синхрони-
зации:
а) режим первичного эталонного таймера PRC или генератора ПЭГ (мастер узел);
б) режим принудительной синхронизации - режим ведомого задающего таймера SRC или
генератора ВЗГ (транзитный и/или местный узлы);
в) режим удержания с точностью удержания 5·10
-10
для транзитного узла и 1·10
-8
для мест-
ного узла и суточным дрейфом 1·10
-9
и 2·10
-8
соответственно [160].
г) свободный режим (для транзитного и местного узлов - точность поддержания зависит от
класса источника и может составлять 1·10
-8
для транзитного и 1·10
-6
для местного узлов
[160]).
Глава 5
Синхронизация цифровых сетей
178
5.3. Общее решение задачи синхронизации
Решением проблемы синхронизации может стать создание общей сети синхронизации (ОСС) а
рамках единой цифровой сети связи. Такой сетью для нас может быть ВСС РФ. Ее создание, про-
возглашенное в [137], было поддержано техническими решениями, основанными на международ-
ных стандартах и предложенными в РТМ МС РФ [160], а также организационными мероприятия-
ми, например, приказами №134 (от 30.11.96) и 141 (от 26.12.96). Нужно отметить, что, несмотря
на определенный прогресс в этой области, сеть ОСС, ни тем более ВСС, пока так и не созданы.
В соответствии с РТМ МС РФ [160] все системы ТСС классифицируется по режиму рабо-
ты на четыре категории:
- синхронный, когда в идеале слипов нет;
- псевдосинхронный, когда допускается ≤ 1 слип/70 дней;
- плезиохронный, когда допускается ≤ 1 слипа/17 часов;
- асинхронный, когда допускается ≤ 1 слипа/7 с.
Предполагается, что режим работы, реализованный на ВСС в России в целом будет не
хуже плезиохронного.
Для создания ОСС предлагаются следующие административно-технические меры.
1 - Реализовать режим работы сети синхронизации по типу иерархической принудительной син-
хронизации с узлами типа “ведущий-ведомый”.
2 - Построить сеть ОСС по региональному принципу, в каждом из регионов реализуется указан-
ный режим синхронизации с качеством на уровне псевдосинхроиного режима.
3 - Управлять региональной сетью ОСС от ПЭГ, соответствующему стандарту G.811 (стабиль-
ность не хуже 1·10
-11
).
4 - Строить региональную сеть синхронизации по типу звезды с ВЗГ, соответствующими стандар-
ту G.812 (стабильность не хуже 1·10
-9
).
5 - Выделить в первую очередь 5 регионов: Центральный (Москва), Северо-западный (С. Петер-
бург), Сибирский (Новосибирск), Дальневосточный (Хабаровск) и Южный (Ростов). В после-
дующем предполагается создать еще 3 дополнительных региона с центрами в Екатеринбурге,
Самаре и Иркутске.
6 - Осуществлять распространение сигналов синхронизации по следующей схеме:
а) для узлов: мастер узел транзитный узел местный узел, причем количество ведомых
узлов не должно превышать 10;
б) для сетей: ПЭГ (PRC) магистральная сеть внутризоновая или местная сети, или по
схеме магистральная сеть внутризоновая сеть местная сеть.
7 - Предусматривается четыре стандартных режима работы таймеров в узлах синхронизации:
а) режим ПЭГ (ведущий или мастер узел);
б) режим принудительной синхронизации (режим ВЗГ - транзитный и/или местный узлы);
в) режим удержания с точностью удержания 5·10
-10
для транзитного узла и 1·10
-3
для мест-
ного узла и суточным дрейфом 1·10
-9
и 2·10
-8
соответственно;
г) свободный режим (для транзитного и местного узлов - точность поддержания зависит от
класса источника и может составлять 1·10
-8
для транзитного и 1·10
-6
для местного узлов.
8 - Для синхронизации сети PDH предлагается использовать только сигнал 2048 кГц, полученный
из входного сигнала ПЦК 2048 кбит/с или тактовый сигнал, переданный через интерфейс
G.703, п.13.
Примечание: Нужно иметь ввиду, что многие отечественные мультиплексоры ПЦИ старых
моделей всех уровней, кроме первичного, не обеспечивают возможность синхронизации от
сигнала 2048 кГц по интерфейсу G.703.
9 - Для синхронизации сети SDH предлагается использовать только сигнал 2048 кГц, полученный
из линейного сигнала STM-1 (см. ниже) со скоростью 155,52 Мбит/с.
10 - При синхронизации смешанной сети (PDH-SDH) следует использовать синхронизацию типа,
указанного выше в п.9.
Глава 5
Синхронизация цифровых сетей
179
11 - Для синхронизации всего оборудования, установленного на узле мам станции, должен
использоваться один источник сигналом синхронизации. Сеть синхронизации должна иметь
топологию “звезды”.
12 - Сеть синхронизации в регионах должна иметь топологию дерева, на каждый ВЗГ сигнал син-
хронизации должен поступать по двум (основному и резервному) независимым разнесенным
направлениям, причем переключение на резервное направление не должно создавать в топо-
логии дерева замкнутых петель.
Примеры эскизного проектирования сети синхронизации приведены в разд. 7.3.2.
5.4. Характеристики хронирующих источников
Рассмотрим существующие классификации таймеров по точности поддержание тактовой частоты.
Существуют две международные классификации: одна использует 4 класса точности Stratum n
вторая - 3 класса таймеров по стандартам ITU-T Rec. G.811, 812, 813. Кроме этого существуют
классификации на уровне организаций связи различных стран, например, классификации блоков
систем синхронизация (БСС), предложенная в РТМ МС РФ [160], или британскими стандартами
на точность таймера цифровых сетей связи. Ниже приведены данные по точности в режиме
свободного хода (показатель точности) и долговременная стабильность (показатель стабильно-
сти) для указанных классов таймеров.
Для таймеров класса Stratum n приняты следующие показатели точности и стабильности
[262]:
• (А) эталонный таймер Stratum 1 - ≤1.0·10
-11
(точность);
• (В) эталонный таймер Stratum 2 - ≤1.6·10
-8
(точность), ≤1.0·10
-11
/сутки (стабильность);
• (С) эталонный таймер Stratum 3 - ≤4.6·10
-6
(точность), ≤3.7·10
-7
/сутки (стабильность);
• эталонный таймер Stratum 3E - ≤4.6·10
-6
(точность), ≤1.0·10
-8
/сутки (стабильность);
• (D) эталонный таймер Stratum 4/4Е - ≤3.2·10
-5
(точность).
Для таймеров, определяемых стандартами ITU-T Rec, G.811,812,813 [118,119,163];
• таймер класса G.811 -≤1.0·10
-11
;
• таймер класса G.812 -≤1.0·10
-9
;
• таймер класса G.813 -≤1.0·10
-8
.
Два таймеров на основе BCC [160]:
• таймер на основе БСС-1 -≤3.0·10
-10
;
• таймер на основе БСC-2 -≤2.0·10
-8
;
• таймер на основе БСС-3 -≤5.0·10
-8
.
Для некоторых таймеров на основе других стандартов [262, 263]:
• таймер Stratum 0 -≤1.0·10
-12
;
• таймер ANSI Stratum 2 -≤1.0·10
-10
;
• таймер класса ITU Type I -≤1.0·10
-10
;
• таймер класса ITU Transit -≤1.0·10
-9
;
• таймер класса ITU Local -≤2.0·10
-8
;
• (E) таймер British Standard -≤1.0·10
-9
;
• таймер Веlcore ЗЕ -≤1.0·10
-8
;
• (F) таймер CCITT G.703 -≤5.0·10
-5
;
• (G) таймер SCC3 (MainStreet 3645) -≤2.5·10
-5
(в свободном режиме).
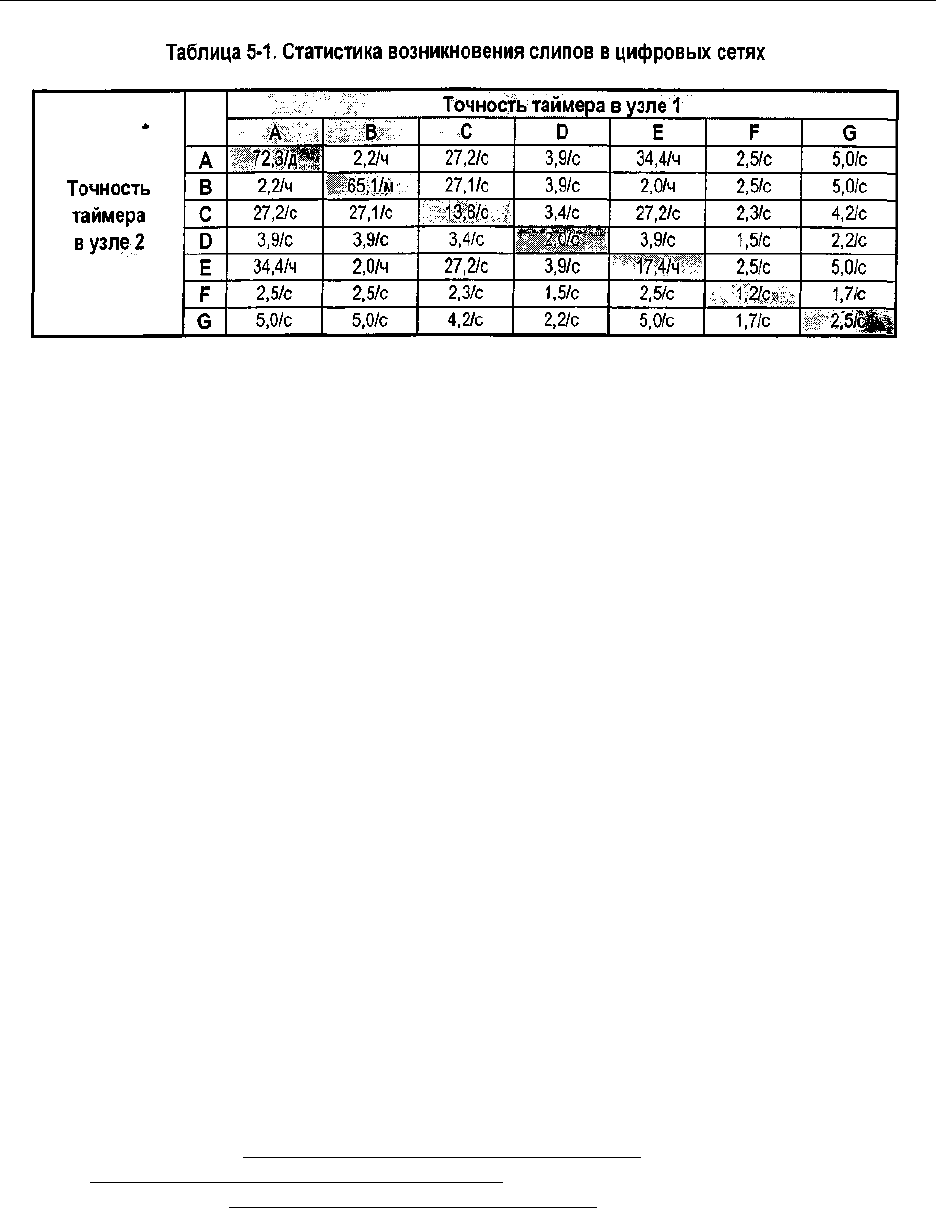
В табл. 5-1 приведена статистика возникновения слипов в цифровых сетях при взаимо-
действии двух узлов, синхронизируемых источниками (таймерами) различной точности (буквы в
ней используются для ссылок на таймеры, помеченные нами и приведенные выше; другие обо-
значения: д - день, ч - час, с - секунда) [262].
Глава 5
Синхронизация цифровых сетей
180
Сравнивая данные таблицы с классификацией систем ТСС выше, можно заметить, что при
существующей томности таймеров синхронный режим вообще неосуществим, псевдосинхронный
режим может быть осуществлен только при взаимодействии узлов с таймерами класса Stratum 1,
или G.811, а плезиохнронный режим может быть осуществлен только при условии; что взаимо-
действующие узлы имеют точность таймеров не хуже 1·10
-9
(допустимые схемы взаимодействия
А, A-E, E-E). Из отечественных таймеров этот режим могут обеспечить только таймеры на основе
БСС-1. Нужно учитывать, что указанная статистика отражает характеристики только одного звена
синхронизации. В многозвенной схеме сети синхронизации, осуществляющей распространение
сигнала синхронизации от звена к звену, что имеет место на практике, ситуация ухудшается фак-
тически пропорционально числу звеньев.
5.5. Оборудование, используемое для синхронизации сети
Оборудование, используемое для синхронизации сети можно условно разделить на две большие
категории:
• автономные хронирующие источники - сетевые таймеры, использующие различные
эталоны времени и частоты.
• датчики точного времени - приемники сигналов точного времени, распространяемых
(транслируемых) мировыми или региональными системами точного времени.
Автономные хронирующие источники основаны на прецизионных атомных (рубидиевых
или цезиевых) эталонах времени, или просто атомных часах. До последнего времени они были
достаточно дорогими и мало доступными устройствами, хотя в связи с развитием синхронных
систем связи Они стали серийно производиться и оказались доступными для установки на сети.
Более простым решением, стало использование датчиков точного времени, работающих
со спутниковыми системами точного времени. Среди них наиболее доступной (из универсаль-
ных и точных) является система мирового координированного времени UTC. Для его трансляции
используются несколько систем, наиболее известные из них:
- международная спутниковая радионавигационная система LORAN-C,
- глобальная система позиционирования GPS, развернутая МО США,
- отечественная система позиционирования ГЛОНАСС, развёрнутая РКС РФ.
Использование традиционных систем приема UTC требует значительных финансовых
затрат и ограничено, как правило, центрами спутниковой связи или мастер-узлами крупных опе-
раторов связи, использующих, например, систему LORAN-C. Однако в связи с широким развити-
ем синхронных, систем связи в последнее время, все большее развитие получают системы, ис-
пользующие датчики GPS.
На их основе была даже разработана альтернатива первичным эталонным источникам
PRS - технология локальных первичных эталонов LPR, в которой сигналы UTC используются
для подстройки частоты управляемых сетевых таймеров. Многие телефонные компании стали

Глава 5
Синхронизация цифровых сетей
181
использовать эту технологию в местах развертывания GPS для создания альтернативы таймерам
класса TNC (в качестве которых обычно устанавливаются улучшенные рубидиевые часы) на
транзитных узлах. В комбинации с технологией LPR, использование синхронизации от UTC по-
зволяет получать локальные первичные эталоны, перекрывающие требования по точности 10
-11
,
устанавливаемые стандартами ITU-T и ETS1 для первичных эталонных таймеров.
Создание системы распределенных первичных эталонных таймеров не только позволяет
увеличить надежность синхронизации цифровых сетей, но и устраняет (при использовании сооб-
щений о статусе синхронизации) возможности нарушения синхронизации.
В нашей стране роль, аналогичную системе GPS, в настоящее время играет система
ГЛОНАСС, хотя ей и предстоит еще проделать определенный путь внедрения, связанный с вы-
пуском отечественных датчиков, способных принимать ее сигналы, или выпуском ведущими ми-
ровыми производителями сетевых таймеров следующего поколения, способных принимать как
сигналы системы GPS, так и ГЛОНАСС.
5.5.1. Автономные сетевые таймеры
При создании цифровой сети связи вопросам синхронизации уделяли до настоящего времени до-
вольно мало внимания. Концентрировались в основном на выборе высокоточного сетевого тайме-
ра, не уделяя должного внимания не только вопросам грамотного построения сети синхрониза-
ции, но и, как нам кажется, самому факту ее создания. Для сетей простой топологии часто каза-
лось, что ее отсутствие существенно не влияет на качественные показатели цифровой сети. Уве-
личение сложности синхронных сетей, а также процесс их объединения, привели к тому, что про-
блема синхронизации стала одной из основных, грамотное решение которой определяет качест-
венные показатели сети.
Независимо от предыстории, проектируя синхронную сеть, необходимо, полностью или
частично выполнить следующие шаги:
• провести обследование созданной (или спроектированной) сети и выяснить существую-
щие
(или предполагаемые) источники сигналов синхронизации, прохождение этих сигналов по сети
и характер взаимодействия узлов по отношению к сигналу синхронизации (кто и от кого синхро-
низируется);
• по результатам анализа провести коррекцию планировки сети синхронизации или спро-
ектировать ее заново;
• провести тестирование и установить таймеры на узлах в соответствии со схемой сети
синхронизации и типом узлов: мастер узел, транзитный узел или местный узел;
• с помощью системы управления сетью синхронизации (или модуля синхронизации в
общей системе управления) провести конфигурацию этой сети, указав список основных и резерв-
ных источников синхронизации и порядок приоритетов их использования;
• провести тестирование сети в различных “аварийных” режимах включения резервных
источников синхронизации и провести реконфигурацию сети в случае сбоев или большего, чем
требуется, уровня слипов;
• после каждой реконфигурации и при повышении количества слипов проводить повтор-
ные тестирования, добиваясь требуемого качества синхронизации сети.
Ясно, что проведение подобной работы требует профессиональных подходов и решений, а
также профессионального оборудования. Существует ограниченный список компаний, предостав-
ляющих такие услуги. Одна из них (выбранная в качестве примера) - компания Hewlett-Packard
(Agilent Technologies) - предлагает комплексное решение этой задачи: таймеры для всех трех
уровней узлов, систему управления сетью синхронизации, а также предоставляет услуги по обсле-
дованию сети и построению сети синхронизации.
Набор таймеров компании включает:
Глава 5
Синхронизация цифровых сетей
182
- для мастер-узлов - внешний источник PRC, управляющий первичными эталонными источника-
ми PRS (цезиевый стандарт частоты HP 5701 А, обеспечивающий точность не хуже 1-2·10
-12
,
(5·10
-13
- типовое значение)); прибор рассчитан на срок службы 10-15 лет, использует фреймо-
вую синхронизацию 8000 Гц для автоматической настройки, и имеет начальную готовность 20
минут;
- для узлов с распределенными PRC или точных распределительных транзитных узлов - источ-
ник PRS HP 55300A, обеспечивающий точность на большом интервале порядка 1·10
-11
, допус-
кающий внешнюю синхронизацию либо от HP 5701 А, либо от датчика системы GPS (точность
порядка 1·10
-12
при наличии ключа для работы с малым дрожанием фазы), либо от сигналов
спутниковой системы точного времени Loran; удобен для решения задач распределения сигна-
лов синхронизации в сетях SDH;
- для распределительных транзитных узлов - блок сетевой синхронизации (NSU/SSU) с источни-
ком класса ANSI Stratum 2, HP 55400A, обеспечивающий точность порядка 1·10
-10
и суточную
стабильность в режиме удержания не хуже ITU Type I, имеет интерфейсную панель с 9 входа-
ми и 400 выходами, может управляться от HP 55300A.
В качестве системы управления может использоваться операционная оболочка HP Smart-
View.
5.5.2. Системы точного времени ГЛОНАСС и GPS
5.5.2.1. Система ГЛОНАСС
ГЛОНАСС - глобальная навигационная спутниковая система - полномасштабная отечественная
спутниковая радионавигационная система (СРНС) - предназначена для непрерывного и вы-
сокоточного определения пространственного (трехмерного) местоположения, вектора скорости
движения, а также времени для широкого класса объектов-пользователей (космических, авиаци-
онных, морских и наземных) [264].
Развертывание спутниковой группировки этой системы до ее штатного состава - 24 нави-
гационных спутника (НС) было завершено в 1995 г. [265]. В настоящее время она состоит из трех
подсистем:
- подсистемы космических аппаратов (ПКА);
- подсистемы (наземного) контроля и управления (ПКУ);
- аппаратуры пользователей (АП).
Структура ПКА такова, что пользователь в каждой точке земной поверхности и околозем-
ного пространства может в любой момент времени одновременно наблюдать 4 спутника, взаимное
расположение и качество сигналов которых позволит ему осуществить (с помощью АП) безза-
просные измерения дальности и радиальной скорости до них. Вместо четырех достаточно бывает
и трех спутников, если используется дополнительная информация. В результате обработки этой
информации, а также информации, содержащейся в радиосообщениях системы, ГЛОНАСС опре-
деляет три (или две) координаты пользователя, величину и направление вектора его путевой ско-
рости, а также текущее время.
Эта задача может быть нормально решена, если используются три или шесть орбитальных
плоскостей с числом спутников в каждой из них не менее 7 (для 3 плоскостей) или 4 (для 6 плос-
костей).
5.5.2.2. Система GPS
Глобальная навигационная спутниковая система GPS [266] - разработана по заказу МО США.
Система предназначена для определения пространственного местоположения, вектора скорости,
ускорения и времени, см. параметры в табл. 5-2. В 1994 г. было завершено развертывание спутни-
Глава 5
Синхронизация цифровых сетей
183
ковой группировки этой системы до ее штатного состава - 24 НС, а с 1995 г. началась ее коммер-
ческая эксплуатация. Система GPS была предназначена в конечном счете на только для военного,
но и для гражданского применения (она призвана служить заменой системы LORAN-C) согласно
директив и обязательств руководства США от 27.03.95).
Учитывая это, практически все современные системы SDH зарубежного производства бы-
ли адаптированы для использования сигналов датчиков GPS. Однако, согласно приказу Минсвязи
РФ №113 (от 03.07.98) [128], использование сигналов GPS на сетях ВСС РФ было разрешено
только до 1.01.99. В качестве альтернативы в [128] предлагалось использовать сигналы системы
ГЛОНАСС. В результате определенных сложностей, связанных с использованием ГЛОНАСС, ряд
российских операторов связи, использующих импортную аппаратуру SDH, продолжают синхро-
низировать свои сети от старой, но устойчиво работающей системы LORAN-C.
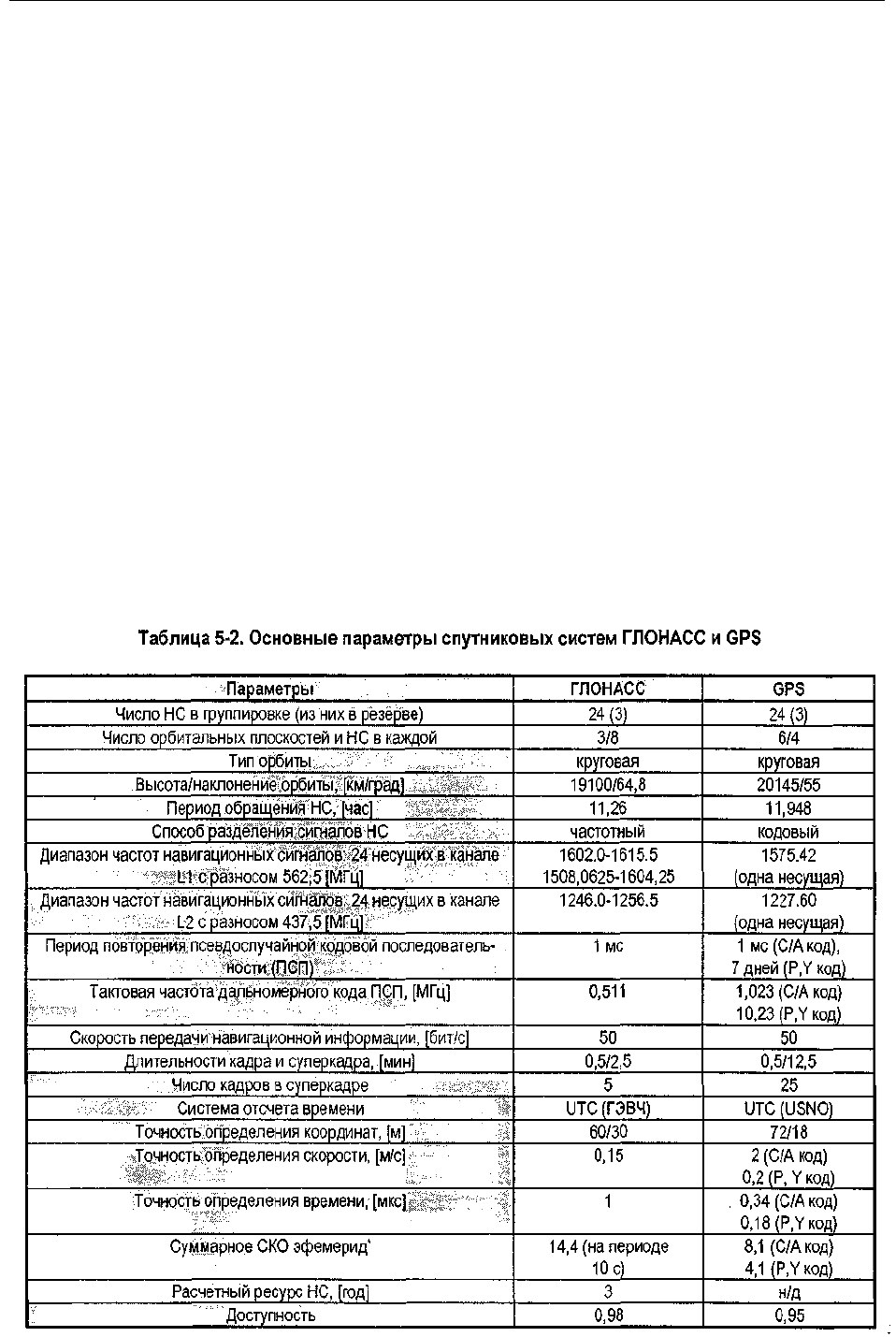
5.5.2.3. Параметры систем ГЛОНАС и GPS
Системы ГЛОНАСС и GPS имеют разную структуру ПКА (см. табл. 5-2 [264]), но состоят из ор-
битальных группировок с одинаковым числом НС (до 24 с учетом 3 резервных), сети наземных
станций наблюдения и пользовательских навигационных приемников. Все спутники обеих систем
являются автономными, параметры их орбит контролируются наземными станциями наблюдения,
которые регистрируют их отклонения от расчетных траекторий, определяют собственное время
бортовых часов и контролируют исправность навигационной аппаратуры.
Основные параметры обеих систем сведены в табл. 5-2. Некоторые из них требуют допол-
нительных пояснений.

Глава 5
Синхронизация цифровых сетей
184
Каждый спутник излучает специальные навигационные сигналы, используя два радиока-
нала L1 и L2 по 24 несущих частоты в каждом (для ГЛОНАСС, использующей технологию
FDMA) или две частоты L1 и L2 (для GPS, использующей технологию CDMA).
Эти сигналы имеют вид фазоманипулированной псевдослучайной последовательности
(ФМ-ПСП), передаваемой с определенной частотой и периодом повторения. В новой версии сис-
темы ГЛОНАСС-М частоты в радиоканале L1 для каналов с 16 по 20 не будут использоваться, как
занятые международными радиоастрономическими каналами, в результате их общее число в
окончательном виде сократиться до 12 и они будут занимать полосу с 1508,0625 до 1604,25 МГц.
В радиоканале L1 системы ГЛОНАСС передаются два сигнала: стандартной точности
(СТ) и высокой точности (ВТ), тогда как в L2 - только один - ВТ. Сигнал СТ доступен всем
пользователям, тогда как сигнал ВТ модулирован специальным кодом и доступен ограниченному
кругу пользователей, имеющих разрешение МО РФ. В модернизированной системе ГЛОНАСС-М
предполагается передавать и сигнал СТ в радиоканале L2.
В системе GPS аналогично используются два режима функционирования: грубый (С/А
код), использующий ПСП с тактовой частотой 1,023 МГц и периодом повторения 1 мкс, и точ-
ный (Р код), использующий ПСП с тактовой частотой 10,23 МГц и периодом повторения 7 дней.
Грубый режим является общедоступным и получается специальным загрублением точного сигна-
ла (используется сециальный генератор джиттера), тогда как точный доступен избранным пользо-
вателям (военные и федеральные службы США, а также пользователи шифрованной версии Р ко-
да - Y кода - с ключами доступа в режиме SA).
Кроме кодовых последовательностей навигационный спутник регулярно передает на час-
тотах L1 или L2 навигационные сообщения со скоростью 50 бит/с, содержащие оперативную и
неоперативную (так называемый альманах системы) навигационную информацию (НИ) - допол-
нительные сведения о состоянии спутника и его параметров: бортовом времени, эфемеридах*,
прогнозе ионосферной задержки, показателях ошибок и работоспособности, справочные данные
из базы данных и поправки.
Навигационная информация в указанных сообщения структурирована по кадрам. Для
ГЛОНАСС кадр имеет длину 1500 бит и состоит из 15 строк-записей по 100 бит. Пять кадров ор-
ганизованы в суперкадр, имеющий длину 7500 бит, передаваемых за 2,5 мин. Для GPS кадр имеет
ту же длину 1500 бит, но суперкадр организован из 25 кадров и имеет общую длину 37500 бит,
передаваемых за 12,5 мин.
5.5.2.4. Определение текущего времени пользователя в системе ГЛОНАС
Не вдаваясь в подробности определения координат пользователя и его путевой скорости,
рассмотрим чуть более подробно определение текущего времени пользователя с помощью указан-
ных систем на примере системы ГЛОНАСС.
Эта система функционирует на основе трех синхронизируемых шкал времени:
- системной шкалы времени (СШВ), основанной на атомном (водородном) системном этало-
не времени и частоты (СЭВЧ) наземного командно-измерительного комплекса (КИК), имею-
щем относительную точность 1·10
-13
с и стабильность 5·10
-14
с/сутки и корректируемом в свою
очередь от
UTC
(ГЭВЧ) два раза в год (с 30.6 на 1.7 и с 31.12 на 1.1);
- бортовой шкалы времени (БШВ), формируемой с помощью атомного бортового эталона
времени и частоты (БЭВЧ), имеющего относительную погрешность 7·10
-12
и стабильность
5·10
-13
; к ней привязываются навигационные сигналы НС, а она, в свою очередь, синхронизиру-
ется с помощью процедуры сверки с СШВ (погрешность сверки <5 нс, что обеспечивает точ-
ность взаимной синхронизации сигналов НС порядка 20 нс на интервале 12 часов) и корректи-
руется аппаратно при уходе БШВ более 1 мс;
- шкалы времени пользователя (ШВП), поддерживаемой опорным кварцевым генератором и
синхронизируемой с помощью навигационных сигналов с НС.
Синхронизация ШВП основана (один из наиболее распространенных способов) на исполь-
зовании указанных навигационных сигналов как для расчета текущего ухода БШВ от СШВ, так и