Сервоприводы. Основы, характеристики, проектирование
Подождите немного. Документ загружается.

Сервоприводы. Основы, характеристики, проектирование
Практика приводной техники. Том 7
12
Указанные системы привода отличаются конструкцией двигателя, конструкцией управляющей
системы и типом обратной связи.
Здесь представлены три главные системы:
• асинхронный двигатель с короткозамкнутым ротором и с управлением ориентированным
полем (раздел 1.6.1),
• синхронный двигатель с постоянными магнитами (с прямоугольной коммутацией) /
бесщеточный двигатель постоянного тока (раздел 1.6.2.1),
• синхронный двигатель с постоянными магнитами (с синусоидальной коммутацией) /
бесщеточный двигатель переменного тока (раздел 1.6.2.2).
1.6.1 Асинхронный двигатель с короткозамкнутым ротором и с управлением
ориентированным полем
Асинхронный двигатель с короткозамкнутым ротором и с управлением ориентированным полем
также называют серводвигателем переменного тока. По его основной конструкции и способу
управления этот двигатель похож на хорошо известный трехфазный асинхронный двигатель с
короткозамкнутым ротором.
Как сервомотор, асинхронный двигатель имеет конструкцию с малым моментом инерции,
малыми потерями и малым скольжением и управляется специальным устройством, которое
обеспечивает перпендикулярность потоков статора и ротора относительно друг друга. Это
позволяет асинхронному двигателю быть управляемым почти до критического момента, делает
его хорошо применимым для высокодинамичных применений.
Недостатками этого двигателя (в сравнении с двигателем с постоянными магнитами) являются
его более низкий к.п.д. и несколько больший объем устройства при одинаковом вращающем
моменте. Ротору присущи потери от тока, которых нет в двигателе с ротором на постоянных
магнитах. В связи с более высокими потерями (кпд - η) и потребности в намагничивающей
составляющей тока (cos ϕ) асинхронной машины, мощность преобразователя должна быть выше
в (1 / η cos ϕ) раз.
Кроме того, должен быть учтен отвод тепла, особенно в диапазоне малых скоростей. Обычно эти
двигатели обеспечиваются принудительной вентиляцией (независимый вентилятор) или
ограничивают диапазон регулирования скорости или момента.
Цены по сравнению с другими приводами выше в связи со сложной обработкой сигналов в
высокодинамичных системах. Это главным образом связано с использованием импульсного
датчика (инкодера) высокого разрешения и мощных быстродействующих микропроцессоров.
Процессор должен непрерывно рассчитывать токи статора в зависимости от положения ротора и
требуемых моментов и параметров намагничивания.
Ранее эти привода обычно использовались в качестве мощных главных приводов в
машиностроении. Однако, ожидается увеличение использования этих приводов в связи с
удешевлением электронных компонентов и использованием более дешевых двигателей.
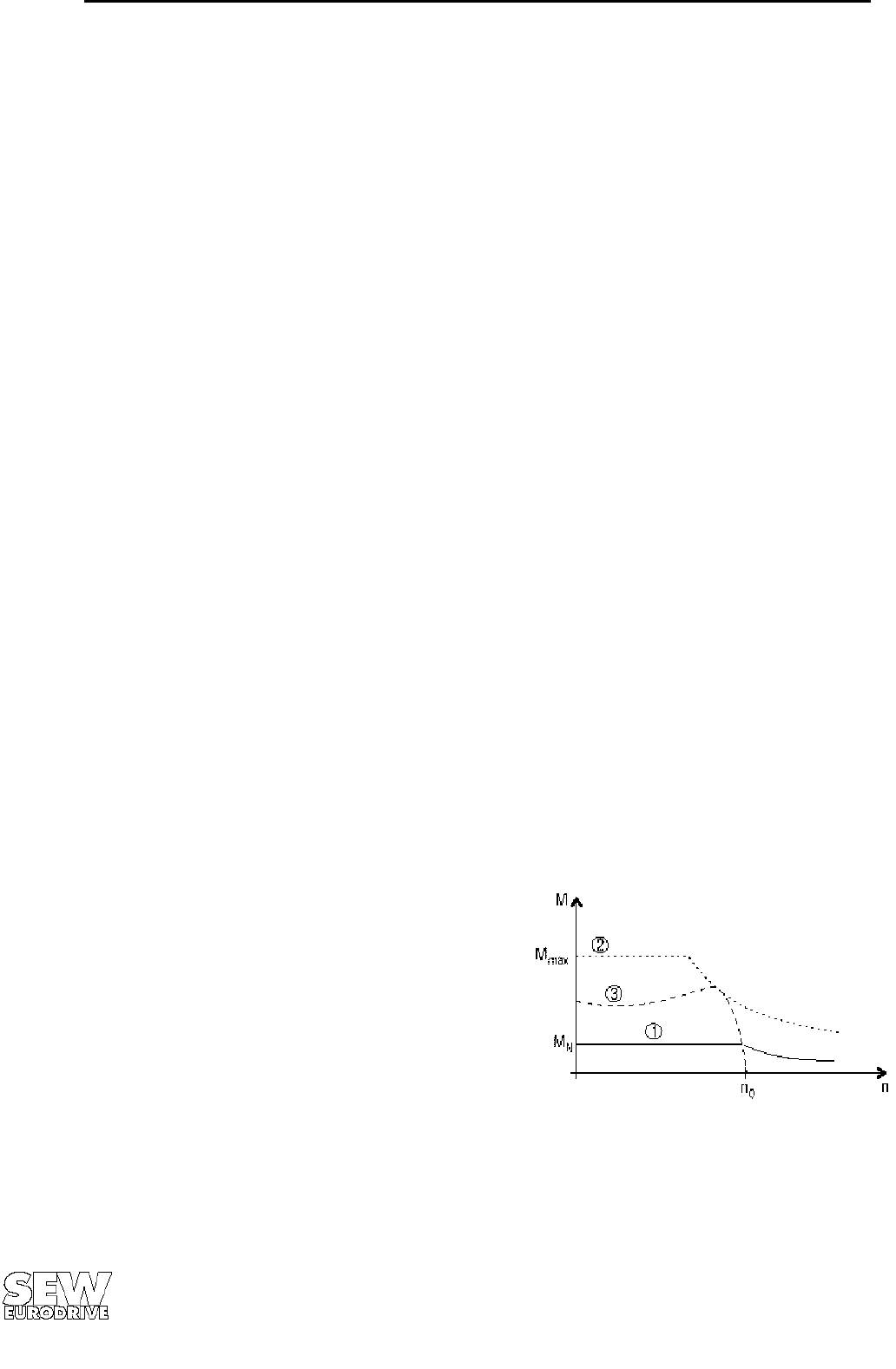
Нагрузочные характеристики (зависимости
момента нагрузки от скорости) показаны для
1 постоянного момента
2 максимального момента
3 характеристика стандартного
асинхронного двигателя
(для сравнения)
Характеристика 2 показывает границу,
зависящую от напряжения звена постоянного
тока преобразователя и его допустимой
токовой нагрузкой. Рис.7. Нагрузочные характеристики.
1.6.2 Синхронный двигатель с постоянными магнитами
Синхронные двигатели с возбуждением от постоянных магнитов с прямоугольной коммутацией,
часто называют двигателями с электронной коммутацией или бесщеточными (бесконтактными)
двигателями постоянного тока. Они в наибольшей степени отвечает требованиям сервосистем.
Статор выполнен так же, как в асинхронном двигателе. На роторе наклеены постоянные
Практика приводной техники. Том 7
Введение
13
1
магниты, создающие постоянное магнитное поле. Двигатели обычно выполняются в закрытом
исполнении (как минимум IP 54) и с вентилятором.
Двигатели могут использоваться при различной степени искажения тока – от прямоугольного до
синусоидального. Различие состоит в форме тока и типе и исполнении требуемого датчика.
1.6.2.1 Синхронный двигатель с постоянными магнитами при прямоугольном токе статора
/ бесщеточный двигатель постоянного тока
Трехфазный синхронный двигатель с постоянными магнитами со ступенчатой (прямоугольной)
коммутацией, описанной ниже, часто называют бесщеточным двигателем постоянного тока.
При прямоугольной коммутации регулятор тока и выходной силовой каскад управляются
датчиком положения ротора (RLG). Он может состоять из датчиков Холла, фотоэлектрических
или подобных датчиков.
Главным преимуществом прямоугольной коммутации является простота получения сигналов
положения и их преобразования в сигналы управления током.
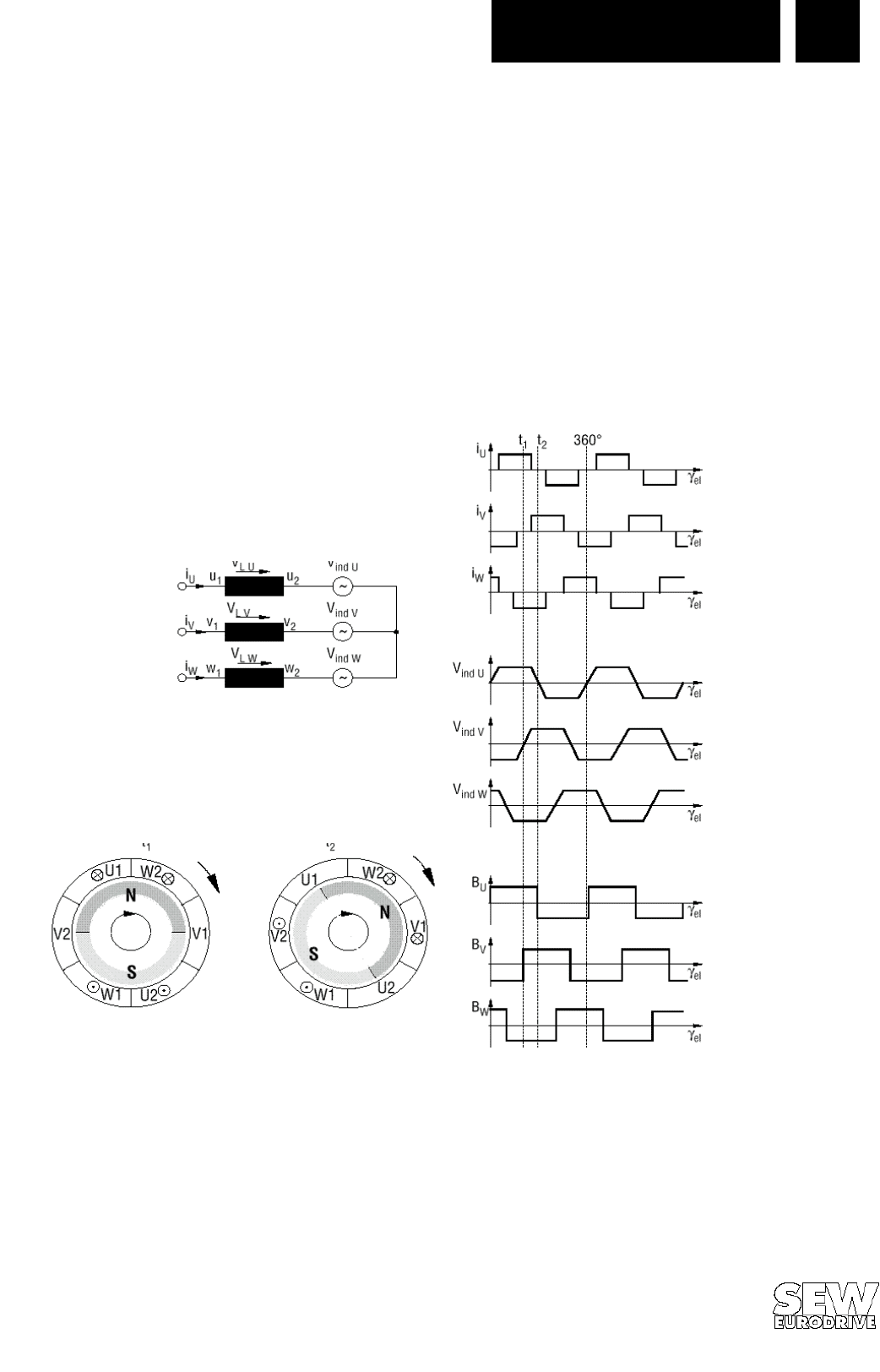
Кривые индивидуальных характеристических параметров показаны на следующем рисунке.
Ток, напряжение и поток во времени
Рис.8. Прямоугольная коммутация
Прямоугольный ток, подаваемый в обмотку двигателя, приводит к индукции в двигателе
трапецеидального напряжения. Конструкция обеспечивает прямоугольное распределение
плотности потока в воздушном зазоре. В результате образуется постоянный вращающий
момент. Две соседних фазы при прямоугольной коммутации всегда запитаны током.
Импульсный датчик положения (инкодер) используется для определения положения ротора,
бесщеточный тахогенератор – для определения скорости.
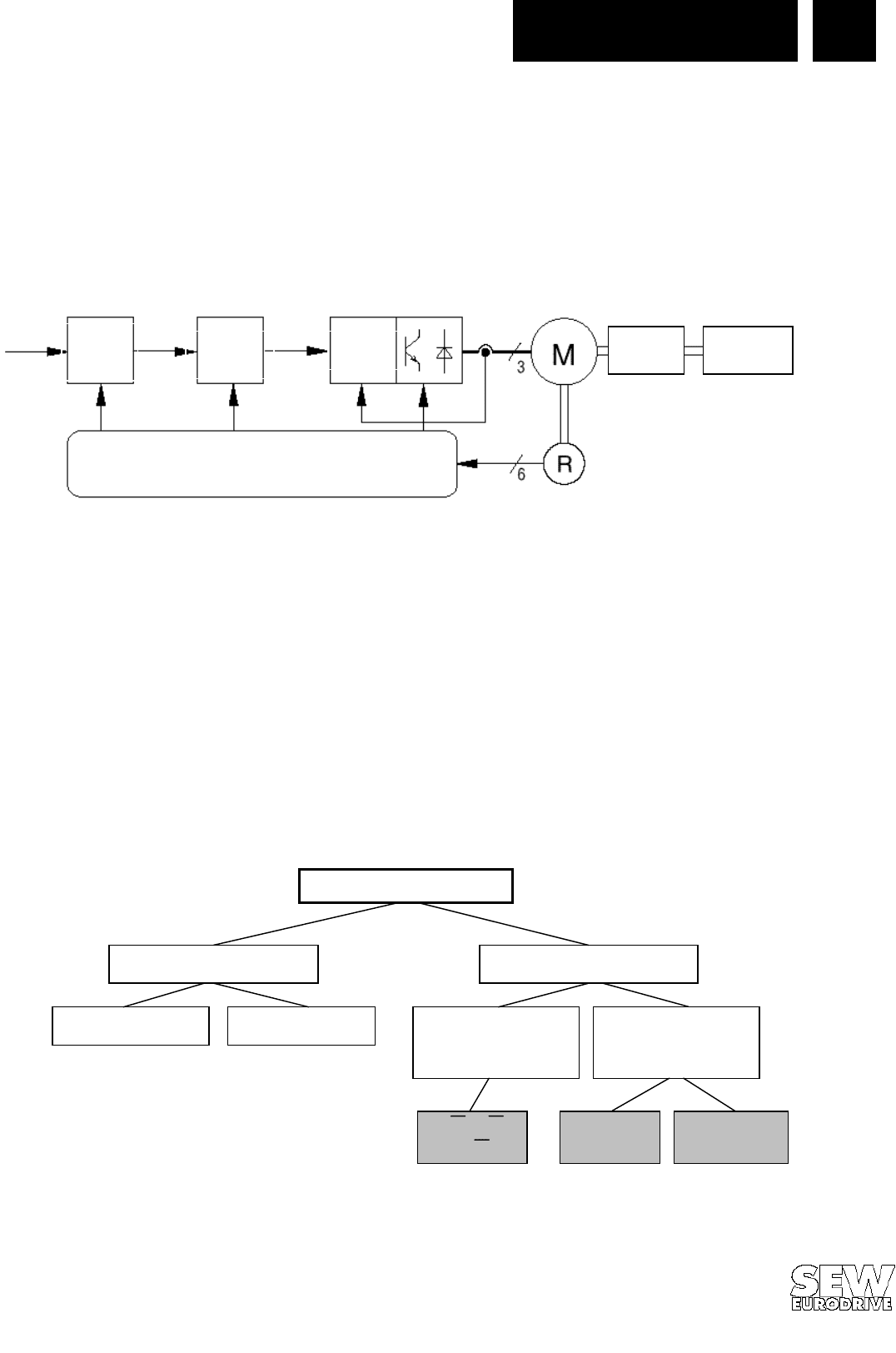
Рис. 9 показывает компоненты системы управления при прямоугольной коммутации двигателя.
Видно, что датчики действительных значений сигналов обратной связи и соединения для
каждого контура управления различны.
Эквивалентная схема
V
ind
– напряжение, индуцируемое
при вращении ротора
V
L
– падение напряжения на индуктивности
Положение ротора во времени

Сервоприводы. Основы, характеристики, проектирование
Практика приводной техники. Том 7
14
Рис.9. Структура управления при прямоугольной коммутации с датчиками
1.6.2.2. Синхронный двигатель с постоянными магнитами и синусоидальным током
статора / бесщеточный двигатель переменного тока
Ток, напряжение и поток во времени
Рис.10. Синусоидальная коммутация
Датчик положения
ротора
Тахогенератор
Д
атчик положения
Поло-
жение
Скорость
Редук-
тор
Ток
Нагрузка
V
ind
– напряжение, индуцируемое
при вращении ротора
V
L
– падение напряжения на индуктивности
Положение ротора во времени
Эквивалентная схема
Практика приводной техники. Том 7
Введение
15
1
Последовательность коммутационного процесса принципиально не отличается от ступенчатой
коммутации. Особенность состоит в том, что все три фазы обтекаются током. Ток, напряжение и
поток имеют синусоидальную форму. Поэтому постоянство вращающего момента и скорости
достигается и на низких скоростях. Этому способствует и исполнение механической части
двигателя.
Двигатели с питанием синусоидальным током оборудуются, как правило, измерительной
системой в виде резольвера. Хотя обработка сигнала резольвера более сложна, при
использовании цифровой техники может быть обеспечена высокая разрешающая способность.
Тот же датчик может использоваться в системе подчиненного регулирования положения
(позиционирования), что экономит средства.
Рис. 11. Структура управления двигателем при синусной коммутации с датчиком
Более подробное описание синхронного двигателя с постоянными магнитами при питании
синусоидальным током дается в главе 4.
1.7 Системы датчиков
Система датчиков служит для измерения значений переменных величин в приводе. К ним
относятся:
• скорость;
• угол поворота ротора (положение внутри одного оборота);
• положение исполнительного органа машины (положение за несколько оборотов).
1.7.1 Обзор применяемых датчиков
Рис.12. Обзор датчиков
Резольвер
Поло-
жение
Скорость
Редук-
тор
Ток
Нагрузка
Преобразователь
Д
атчики
Аналоговые датчики Цифровые датчики
Тахогенераторы
А
, А, В, В,
С, С
Двоичный
код
Код Грея
Резольверы
Датчики
приращений
(импульсные)
Датчики
абсолютных
значений
Сервоприводы. Основы, характеристики, проектирование
Практика приводной техники. Том 7
16
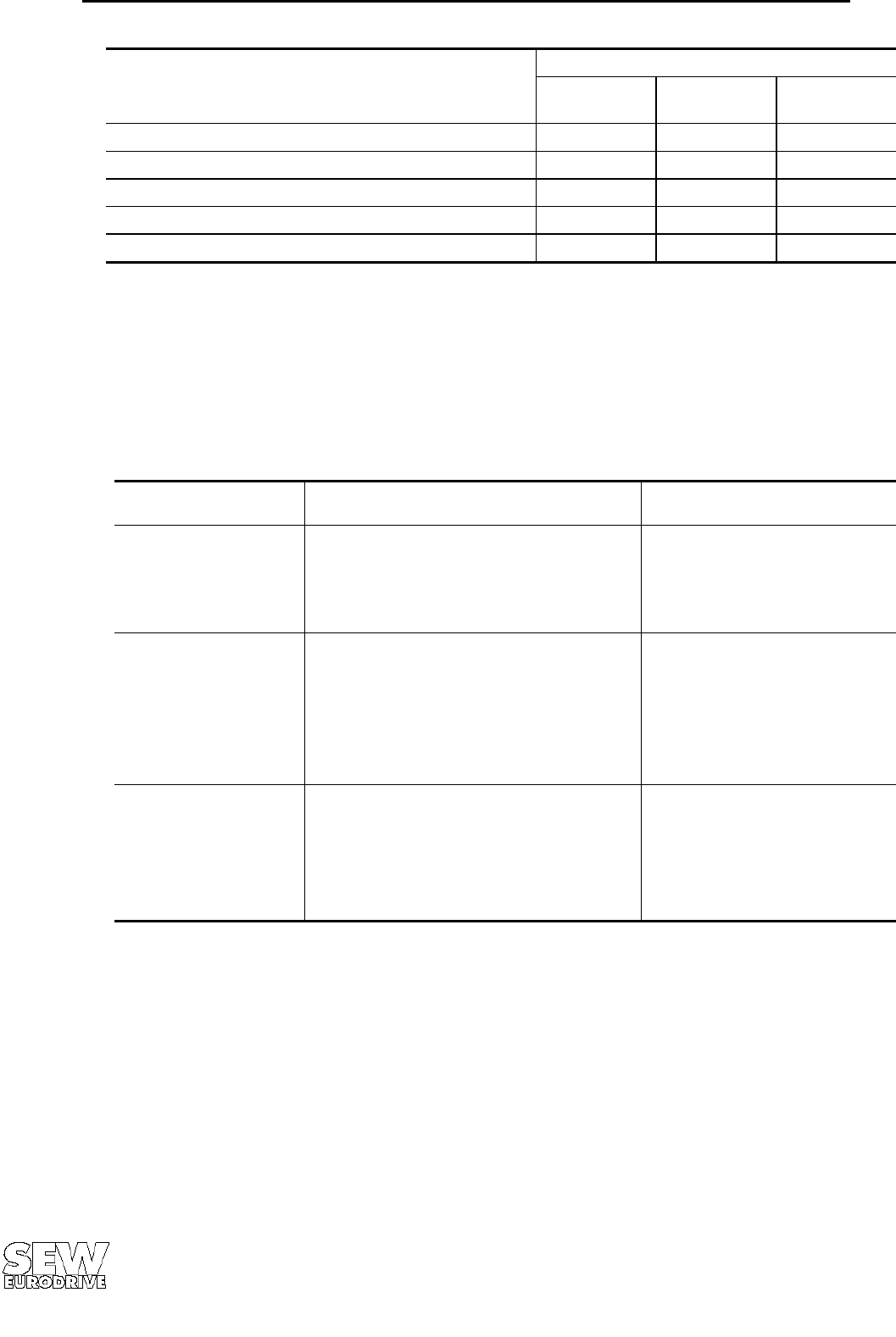
Различные датчики характеризуются следующими техническими параметрами:
Датчик Измеряемые данные
Положение
ротора
Положение
ИО
Скорость
Датчик абсолютных значений однооборотный
X (X) (X)
Датчик абсолютных значений многооборотный
X X (X)
Датчик приращений
(X) (X) (X)
Резольвер с АЦП
X (X) X
Тахогенератор
X
X - непосредственное получение данных,
(X) - используется с дополнительным преобразователем данных.
Важнейшим критерием при выборе датчика является грубость системы измерения. Так как
датчик устанавливается непосредственно на двигателе, он должен быть нечувствителен к
вибрации и изменениям температуры. Другим важным фактором является помехоустойчивость
измерительной системы.
1.7.2 Достоинства и недостатки важнейших измерительных систем
Измерительная
система
Достоинства Недостатки
Датчик приращений
• относительно грубое исполнение
• большое разнообразие по
разрешающей способности,
конструктивному исполнению,
интерфейсу
• при потере напряжения
исчезает информация о
положении
Датчик абсолютных
значений
• информация о положении
сохраняется при исчезновении
напряжения
• однозначная связь между
положением и выходной величиной
• возможна очень высокая
разрешающая способность
• высокая стоимость
Резольвер
• грубое исполнение
• устойчивость к температуре и
вибрациям
• может быть встроен в двигатель
• экономия других измерительных
систем
• высокие
эксплуатационные
расходы
Сравнение указывает на целесообразность использования резольвера для серводвигателей.
Практика приводной техники. Том 7
Синхронный двигатель с
постоянными магнитами
17
2
2 Синхронный двигатель с постоянными магнитами
2.1 Конструкция и принцип действия
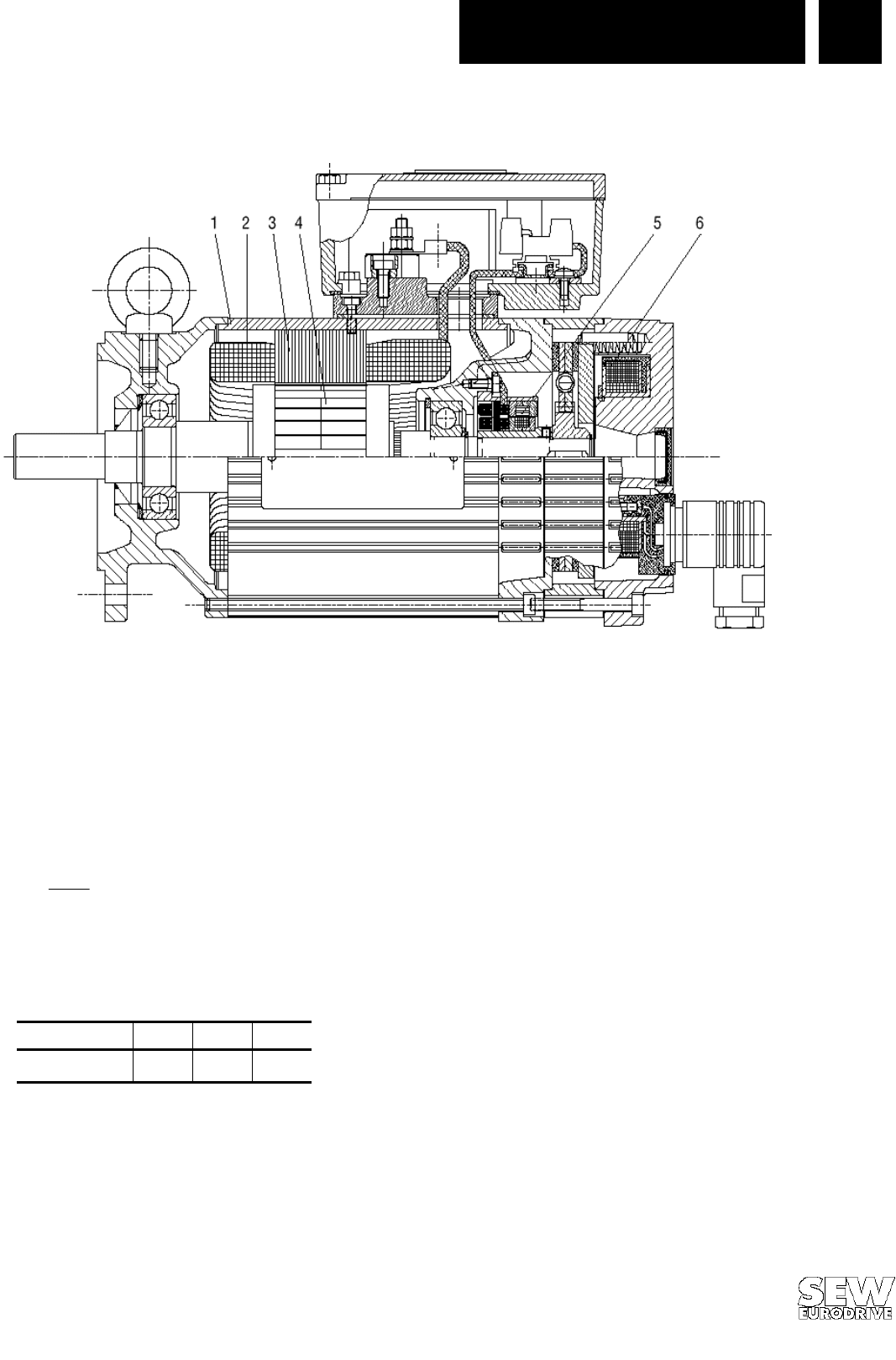
Рис 13. Разрез синхронного двигателя с постоянными магнитами
Обозначения:
1. Статор 4. Ротор с постоянными магнитами
2. Обмотка статора 5. Резольвер
3. Пакет стали статора 6. Тормоз
Синхронные двигатели представляют собой двигатели с вращающимся магнитным полем, в
которых поля статора и ротора вращаются синхронно.
В результате пространственного сдвига обмоток статора и фазовой последовательности входного
тока создается вращающееся поле.
Скорость вращения поля
n
d
рассчитывается по формуле:
n
f
p
d
=
⋅ 60
, где f - частота напряжения питания;
p - число пар полюсов статора.
Двигатели SEW всегда выполняются как шестиполюсные (p=3). Зависимость скорости от частоты
такова:
f [Гц]
100 150 225
n
d
[об/мин]
2000 3000 4500
Двигатели SEW выполняются шестиполюсными потому, что при этом числе полюсов потери в
железе на скорости 3000 об/мин (150Гц) малы, причем одновременно обеспечивается хорошее
постоянство момента при малом необходимом потоке.
Обмотки двигателей SEW обычно соединяются звездой.
Как и в асинхронном двигателе статор состоит из корпуса, шихтованного пакета и статорной
обмотки. Ротор состоит из вала, листов стали и наклеенных постоянных магнитов. Чтобы снизить
момент инерции и обеспечить высокую динамику, листы ротора выполняются не сплошными, а
имеющими отверстия (см. Рис.14). Этим достигается малое время разгона двигателя.
Сервоприводы. Основы, характеристики, проектирование
Практика приводной техники. Том 7
18
Для изготовления магнитов используются редкоземельные элементы неодим-железо-бор. Магниты
из этого материала имеют лучшие магнитные свойства по сравнению с ранее применяемыми
ферритовыми и могут создавать больший вращающий момент.
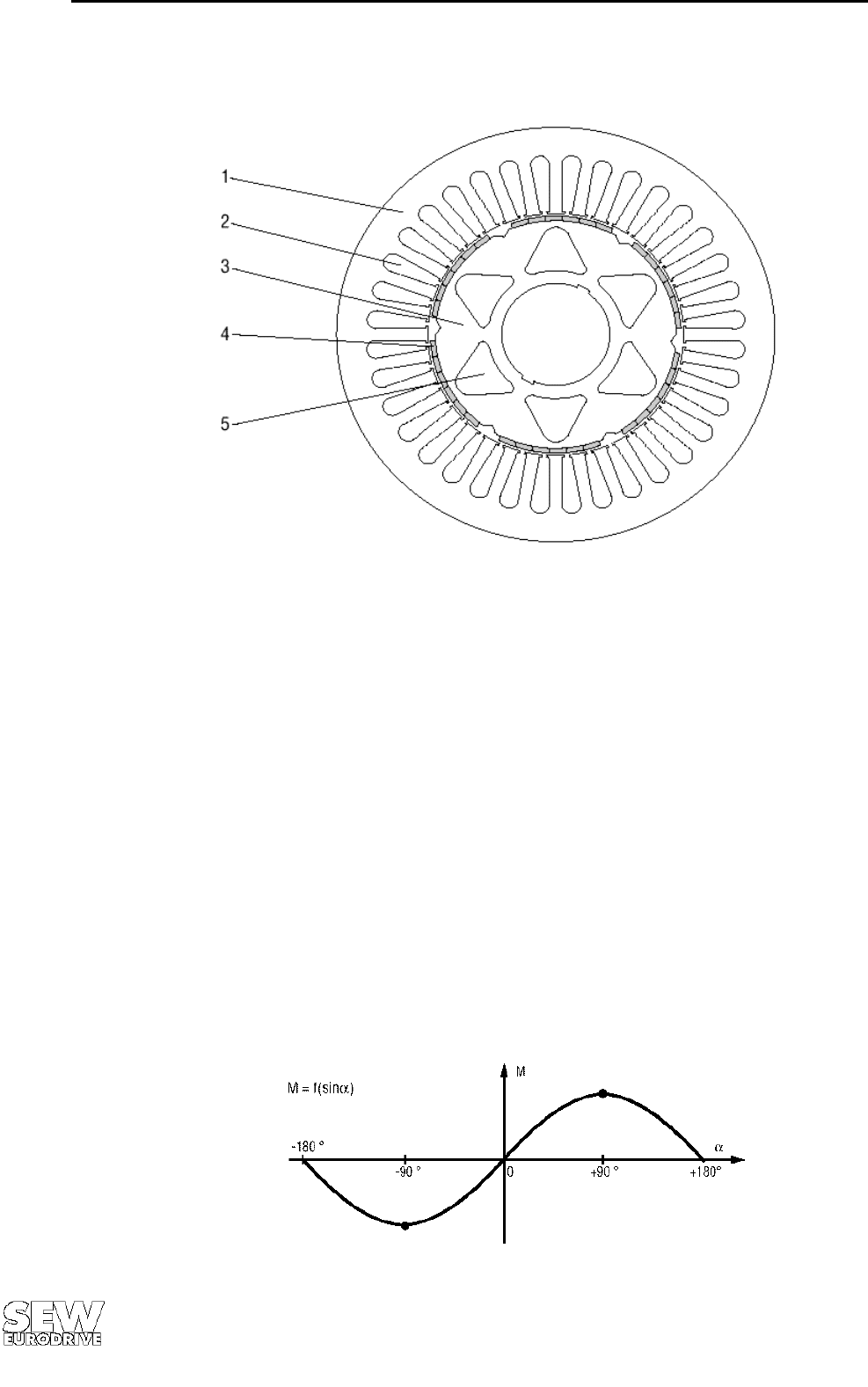
Рис.14. Разрез статора и ротора
Обозначения:
1. Лист статора
2. Пазы для обмотки
3. Лист железа ротора
4. Постоянные магниты
5. Отверстия для уменьшения момента инерции
2.1.1 Работа синхронного двигателя с постоянными магнитами
При питании двигателя от преобразователя, обмотками статора создается вращающееся магнитное
поле статора. Оно воздействует на ротор, образуя приложенное к нему усилие. Благодаря
магнитной связи между статором и ротором ротор ускоряется и в дальнейшем вращается с той же
угловой скоростью, что и поле статора, т.е. синхронно.
При увеличении нагрузки на валу поле ротора начинает отставать от поля статора на некоторый,
так называемый, полюсный угол α. Сначала вращающий момент растет с ростом угла. Когда угол
достигает 90
°
, т.е. полюс ротора расположен точно между двумя полюсами статора, усилие,
действующее на ротор, достигает максимума. Это тот случай, когда поле статора опережает поле
ротора и тянет за собой ротор. Если полюсной угол продолжает увеличиваться, т.е. двигатель
перегружен, то вращающий момент уменьшается, двигатель попадает в зону неустойчивой работы
и останавливается.
Это значит
(
)
MfUI= ,,sinα , т.е. вращающий момент является функцией напряжения, тока и
полюсного угла
Рис. 15. Зависимость вращающего момента от полюсного угла
Практика приводной техники. Том 7
Синхронный двигатель с
постоянными магнитами
19
2
2.1.2 Управление двигателем
Чтобы двигатель использовался с максимально возможным моментом, надо обеспечить, чтобы
полюсный угол был равен α = 90
0
. В двигательном режиме поле статора при этом опережает ротор,
а в генераторном - отстает от него на 90
0
. Задача управления двигателем состоит в том, чтобы
рассчитать задающие значения трех фазных токов, исходя из требуемого момента, и задать
пространственное размещение векторов тока.
Для этого определяется с помощью датчика реальное положения ротора. К полученному значению
угла ротора в зависимости от направления вращения и знака момента прибавляются или
вычитаются 90
0
и рассчитывается требуемый ток.
Для каждого углового положения ротора определяется соответствующее положение поля статора,
т.е. ротор определяет значение и направление поля статора. Таким образом ротор ’’ поворачивает’’
поле статора.
Упоминающийся здесь полюсной угол α отсчитывается в электронных градусах и в 6-полюсном
двигателе углу 90
0
электрических соответствует пространственный угол равный 30
0
.
2.1.3 Соотношения тока в статоре
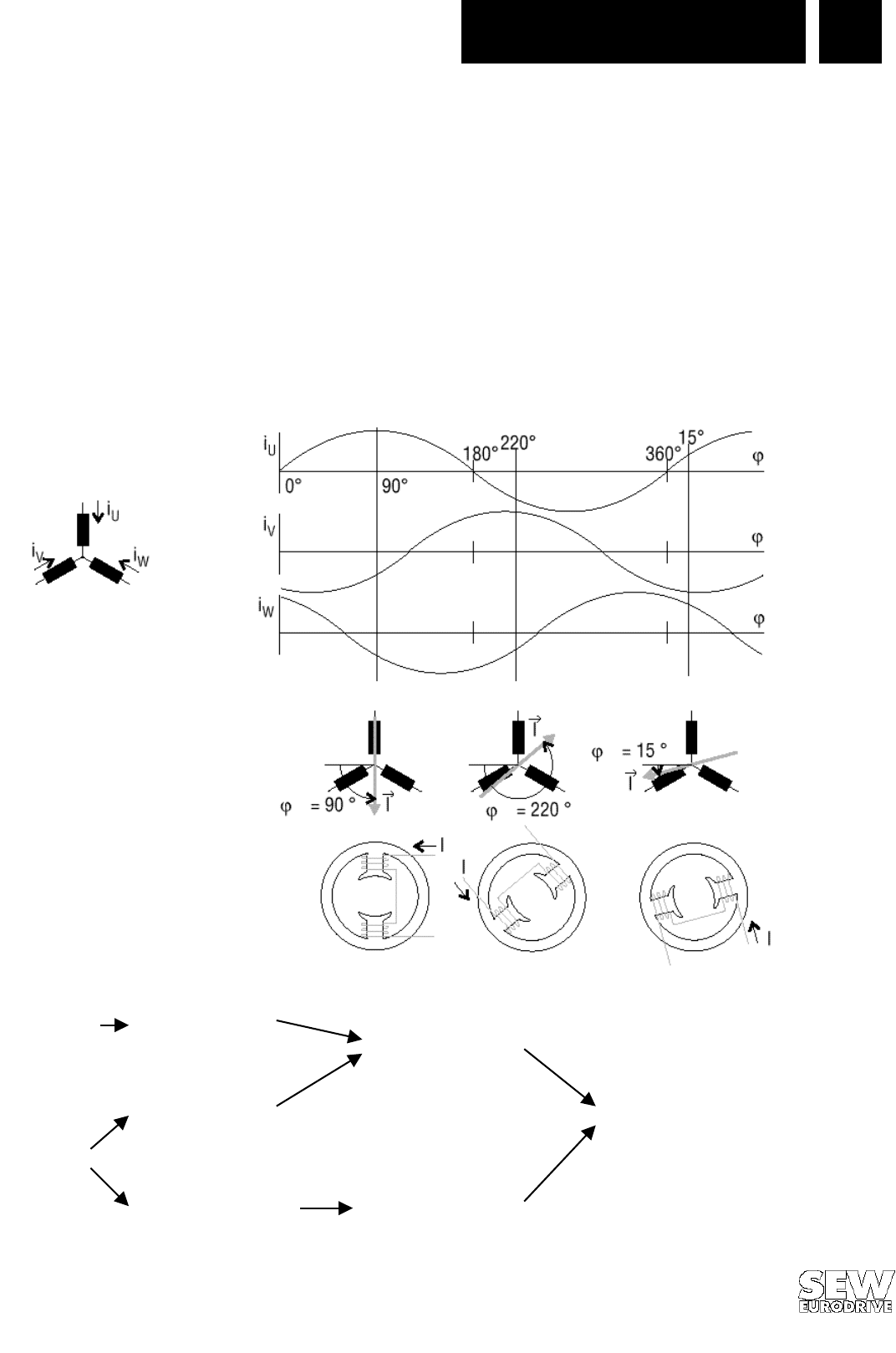
Рис.16. Пространственный вектор тока
Сигнал Угловое Направление
резольвера положение ротора пространственного
вектора тока
I
→
Желаемое Мгновенные значения
направление токов двигателя i
U
, i
V
, i
W
,
Желаемое действия момента как задающие значения
значение для регулирования тока
момента Модуль
(I)
двигателя Модуль желаемого пространственного
момента двигателя вектора тока
I
→
Рис. 17. Формирование мгновенных значений токов
Вектор тока I
→
- векторная
сумма токов
i
U
, i
V
, i
W
Наглядное представление об
образовании вращающего
момента можно получить
рассматривая соотношения
для статора в последова-
тельные моменты времени:
Сервоприводы. Основы, характеристики, проектирование
Практика приводной техники. Том 7
20
2.2 Механические характеристики
При рассмотрении механических характеристик (зависимости момента от скорости) синхронных
двигателей DFY и проектировании привода надо принимать во внимание три ограничения.
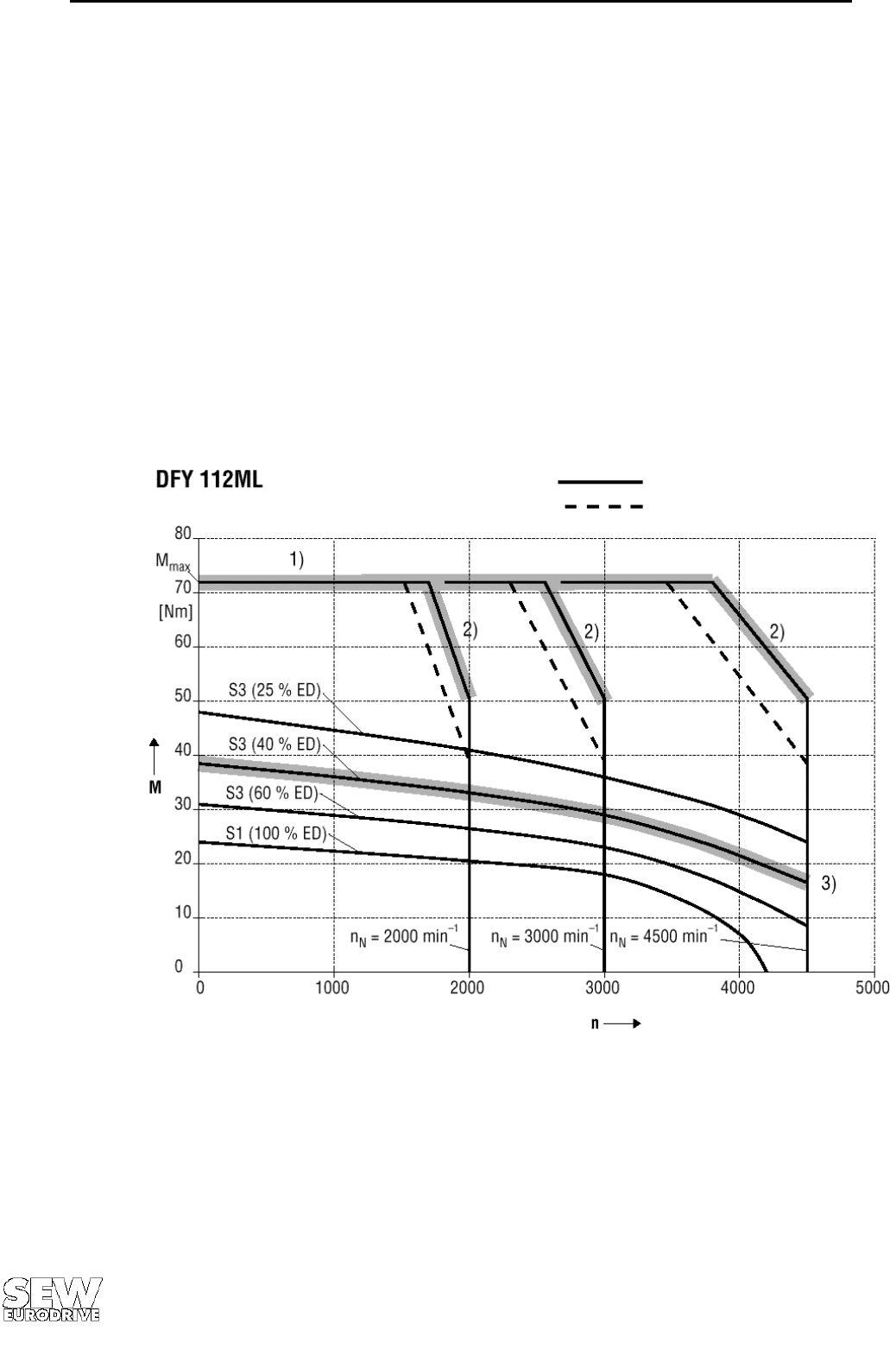
1) Наряду с другими факторами момент двигателя ограничивается допустимым значением
перегрузки постоянных магнитов. Если при перегрузке ток статора увеличивается до
недопустимых пределов, постоянные магниты размагничиваются и двигатель ’’ теряет момент’’.
При правильном выборе и согласовании двигателя размагничивания не возникает.
2) Надо иметь ввиду уменьшение момента в верхней части диапазона скорости в зависимости
от напряжения на двигателе, которое зависит от напряжения промежуточного звена
преобразователя и падения напряжения в проводах. Уменьшение момента происходит из-за
того, что при увеличении ЭДС двигателя оказывается невозможным поддержать требуемое
значение тока статора.
3) Следующие ограничения связаны с термической перегрузкой двигателя. Здесь должен быть
вычислен эффективный вращающий момент, который должен быть меньше, чем момент
M
O
,
допустимый при неподвижном двигателе. Превышение допустимой термической нагрузки также
ведет к размагничиванию магнитов.
Рис.18. Механические характеристики (зависимости момента от скорости) серводвигателя
(ED = cdf = ПВ, т.е. продолжительность включения)
2.3 Электромеханический аварийный и стояночный тормоз
Тормоза, которые применяются в больших серводвигателях, по своей механической конструкции
не отличаются от применяемых в асинхронных двигателях. В сервотехнике они играют роль только
аварийных и стояночных тормозов, т.к. серводвигатель тормозится и останавливается
электрическим путем. Поскольку это так, тормоза, применяемые в синхронных двигателях SEW,
могут создавать большой стояночный момент (3 М
0
) и рассчитаны на большую работу тормоза. Это
представляет особенный интерес при использовании серводвигателей SEW в приводах подъемных
механизмов.
U = Uн
снижение при U = 0,9 Uн
об/мин
Практика приводной техники. Том 7
Синхронный двигатель с
постоянными магнитами
21
2
Тормоза обычно применяются только при:
• длительной стоянке (термическая разгрузка двигателя);
• аварийной остановке.
Дисковый тормоз поставляется встроенным в двигатель как дополнительное устройство (при
необходимости). Демонтаж и монтаж, как правило, возможен без разборки двигателя.
Тормоз имеет отдельный соединитель с независимым подключением электрического питания.
Стандартно тормоза выполняются для подключения на 230 В и 400 В переменного тока и на 24 В
постоянного тока.
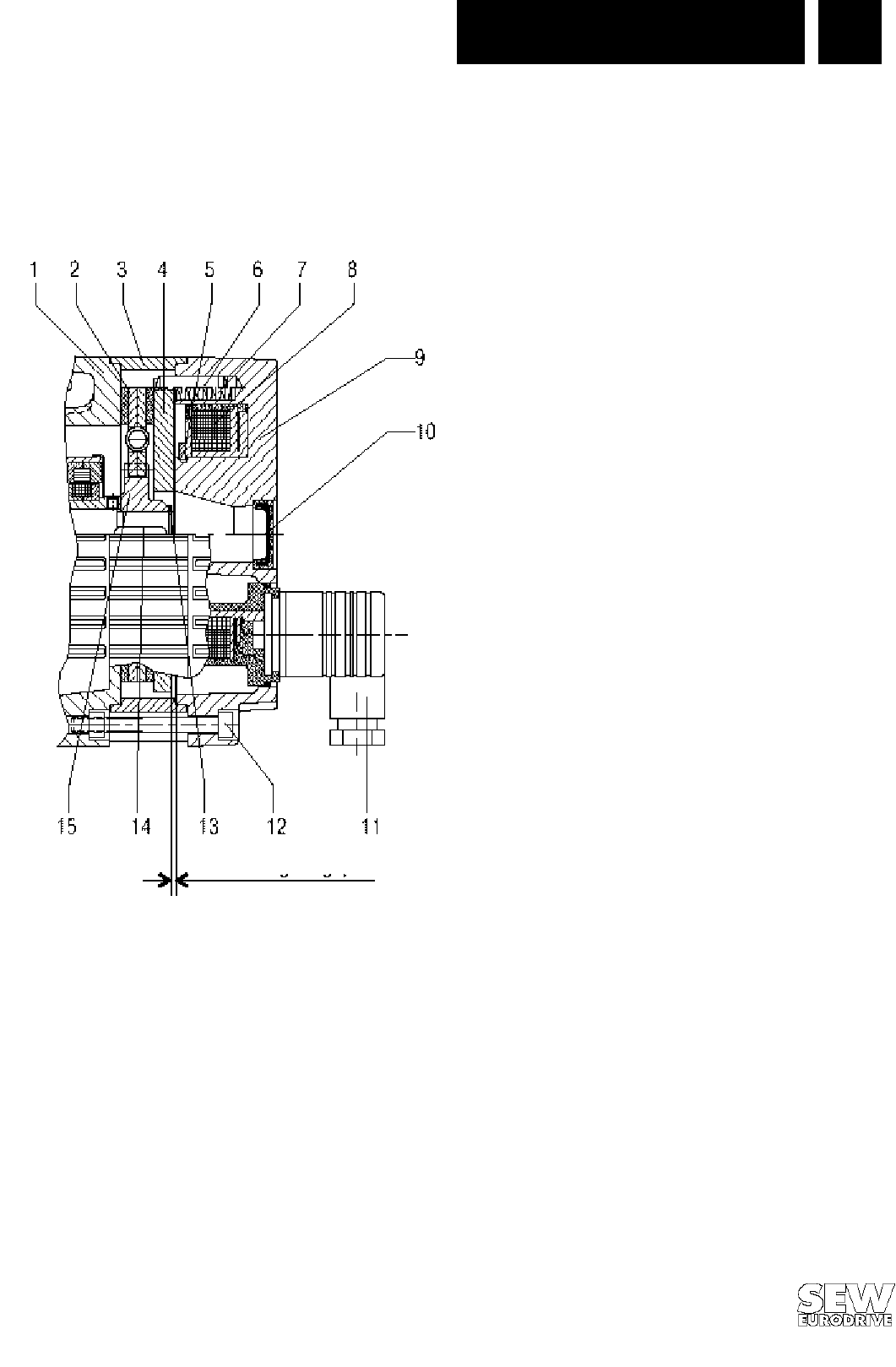
Обозначения:
1. Подшипниковый щит
2. Тормозной диск
3. Промежуточное кольцо
4. Якорный диск
5. Защитное кольцо
6. Цилиндрический штифт
7. Тормозная пружина
8. Тормозная катушка
9. Корпус катушки
10. Защитный колпак
11. Угловой разъем
12. Болт
13. Защитное кольцо
14. Призматическая шпонка
15. Поводок
Рис. 19. Разрез тормоза
Электромагнитный дисковый тормоз отпускается при подаче постоянного тока на катушку, т.е.
растормаживается электрическим путем. При отсутствии напряжения тормозное усилие создается
за счет тормозных пружин. Система отвечает основным требованиям безопасности. Тормоз
накладывается автоматически при отсутствии напряжения или обрыве цепи питания.
Катушка тормоза выполнена двухсекционной. Тормозной выпрямитель или управляющий прибор
включает сначала ускоряющую катушку. Когда тормоз отпущен, с помощью электроники
осуществляется переключение на удерживающую катушку.
Особенностями этой тормозной системы являются минимальный износ (максимальный срок
работы) и высокая коммутационная способность.
При длительно расторможенном тормозе тепловые потери сведены к минимуму и тормоз не
испытывает большой термической нагрузки.
Тормозной момент зависит от типа и числа тормозных пружин. Тормоза с наибольшим тормозным
моментом (до 3М
0
) используются преимущественно в приводах подъемных механизмов.
Управление тормозом осуществляется с помощью тормозного выпрямителя или управляющего
прибора. Тормозной выпрямитель подключается на напряжение переменного тока, а управляющий
Рабочий воздушный зазор