Сергеев А.Г. Конспекты лекций по дисциплине - Системы управления полупроводниковыми преобразователями - Микропроцессорные системы управления полупроводниковыми преобразователями
Подождите немного. Документ загружается.


повышение температуры обмотки, что приводит к снижению уровня
изоляции и авариям.
Так же неблагоприятно сказываются броски пускового тока на
питающую сеть, приводя к большим просадкам напряжения, что
отрицательно сказывается на устойчивости работы других потребителей.
Большие пусковые токи, потребляемые электродвигателями в момент их
пуска, и связанные с этим глубокие посадки напряжения очень усложняют, а
в ряде случаев делают невозможным пуск в работу двигателей в случае их
электроснабжения от газотурбинных, дизельных или иных электростанций
ограниченной мощности.
В связи с отмеченными моментами стараются обеспечивать работу
высоковольтных двигателей без остановов возможно более длительное
время, даже когда указанное не требуется по технологии. А это, в свою
очередь, приводит к значительному перерасходу электроэнергии.
Ò 6
Ò 5
Ò 4
Ò 3
Ò 2
Ò 1
6 ( 1 0 ) ê Â
Ñ È Ô Ó
Ì
Рис. 22
Проблема исключения ударных пусковых нагрузок, и, следовательно,
повышения надёжности работы и снятия ограничения на число пусков и
остановов агрегатов с высоковольтными электродвигателями, а так же
снижения просадок напряжения может быть решена посредством
применения устройств плавного пуска (УПП) для безударного пуска
высоковольтных электродвигателей. УПП выполнено по принципу
тиристорного регулятора напряжения (рис. 22) и обеспечивает ограничение
скорости нарастания и значения пускового тока электродвигателя
изменением углов отпирания тиристоров через СИФУ. В течение заданного
времени пуска электродвигателя происходит плавное нарастание напряжения
на обмотках статора от нуля до номинального значения. Пусковой ток
увеличивается плавно с заданным токоограничением, не создавая ударных
электромагнитных моментов, отрицательно сказывающихся на
электродвигателе и механизме. На тиристоры подаются управляющие
импульсы, формируемые блоком системы управления (БСУ) и
синхронизированные с питающей сетью Uа, Uв, Uc.
БСУ осуществляет регулирование фазового угла (угла регулирования )
управляющих импульсов на тиристорах в функции управляющего сигнала
Uу=К() от максимального значения
max
=180 электрических градусов до
минимального
min
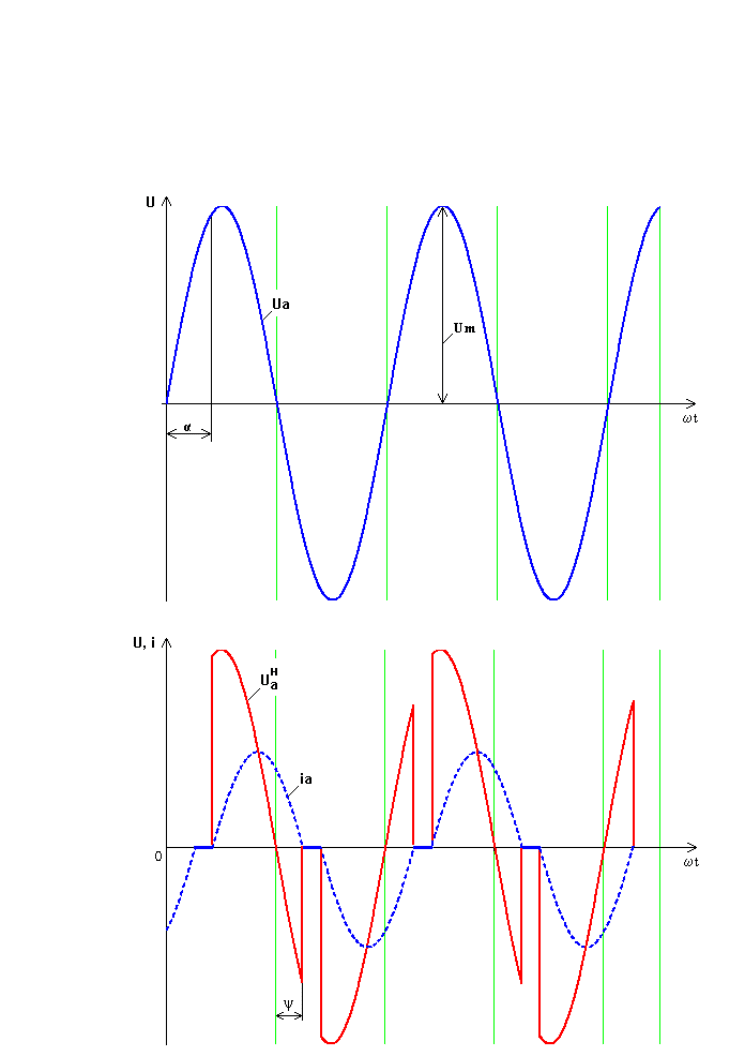
=0 электрических градусов. Временные диаграммы
напряжения и тока в нагрузке для одной из фаз при угле регулирования
75 электрических градусов представлены на рисунке 23. Напряжение на
активно-индуктивной нагрузке представляет собой часть входного
напряжения синусоидальной формы, величина которого изменяется в
зависимости от угла управления
min
max
. Для значений углов
регулирования 180 эл. градусов напряжение на нагрузке равно нулевому
значению, а для напряжение на нагрузке равно входному напряжению
питающей сети, где = arctg
Rн
ωLн
.
Математически зависимость выходного напряжения описывается
уравнением
,2sinψπ2sin
4
1
2
ψπ
π
1
UU
mвых
где U
вых
– действующее значение напряжения на нагрузке;
U
m
– амплитудное значение входного напряжения;
ψ
- угол сдвига тока.
Работоспособность трехфазного тиристорного регулятора
обеспечивается при длительности управляющих импульсов не менее 60
электрических градусов.
Рис. 23
Ñ È Ô Ó Ð Ò
Ç Ò
Â Ï Ó
Ï Ó
" Ã î ò î â í î ñ ò ü "
" Ï ó ñ ê "
U
Ç Ò
" Ð à á î ò à "
U
Ä Ò
Ì Ï Ñ Ó
Á Ä Ò
Á Ñ Ó
Á Ó Â
Ì
~ 6 ( 1 0 ) ê Â
Q S 1
Q F 1
Q S 2
Q W 1
Á Ñ Ì 1
Á Ñ Ì 3
Ë Ó
Рис.24
Общая структура системы управления УПП показана на рис. 24 и
включает в себя СИФУ, регулятор тока РТ, логическое устройство ЛУ,
задатчик тока ЗТ, встроенный пульт управления ВПУ для задания
параметров, блок датчика тока БДТ и пульт управления пуском ПУ.
Логическое устройство ЛУ в данной структуре управляет высоковольтными
выключателями и контролирует окончание разгона, после чего выдает
команду на включение шунтирующего выключателя QW1. Силовая часть
показана в виде однолинейной схемы. Пример диаграммы пуска (задание
тока) показан на рис. 25. Это задание формируется задатчиком тока.
t
0
I
ï 1
I
ï
I
ï 2
I
ï 3
t
1
t
2
t
3
t
5
t ï
Рис. 25.
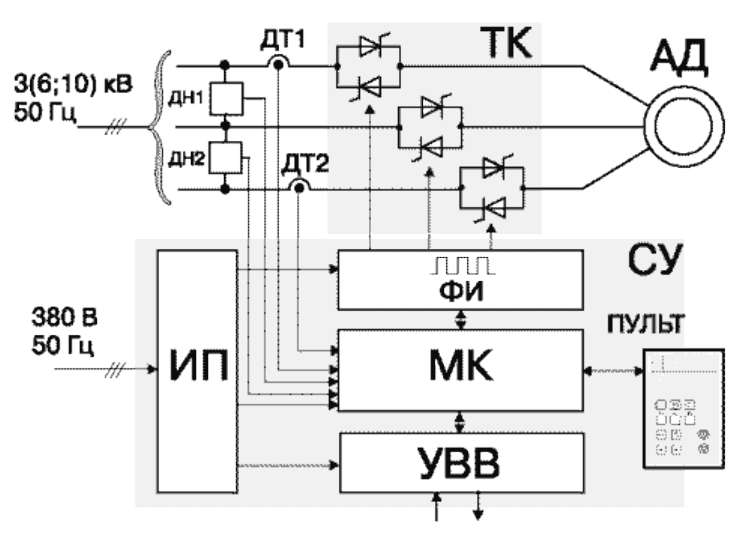
Рис.26
В некоторых случаях система управления УПП может быть построена
по структуре подчиненного регулирования с внешним контуром напряжения.
В этом случае в структуру добавляются регулятор напряжения, датчик
напряжения, а вместо задатчика тока будет задатчик напряжения. Такая
структура управления показана на рис. 26.
Распределенная система управления УПП
Выше рассмотренные системы управления УПП были построены на
основе одного процессора управления. Недостатки такой системы: слабая
оперативная диагностика системы.
Рассмотрим УПП сконструированное с использованием концепции
«распределенной системы», которая состоит из четырех интеллектуальных
модулей: модуля центрального процессора и трех контроллеров фаз,
связанных с центральным процессором по оптическим каналам и
обеспечивающих управление тиристорами каждой из фаз. Достоинствами
такого построения является значительно возросшие надежность и живучесть
системы. Поскольку все модули обладают как средствами самодиагностики,
так и способностью контролировать адекватность сигналов своих «соседей»,
отказ любого модуля легко обнаруживается и принимаются меры по
предотвращению развития аварийного процесса. Даже полное разрушение
модуля центрального процессора во время пуска не приводит к
возникновению аварийных режимов в силовой части устройства – в течение
20 мс тиристоры отключаются уцелевшими модулями распределенной
системы. Наличие широких диагностических возможностей обеспечивает
эффективную профилактику выхода из строя дорогостоящих силовых
элементов из-за неисправностей низковольтной электроники.
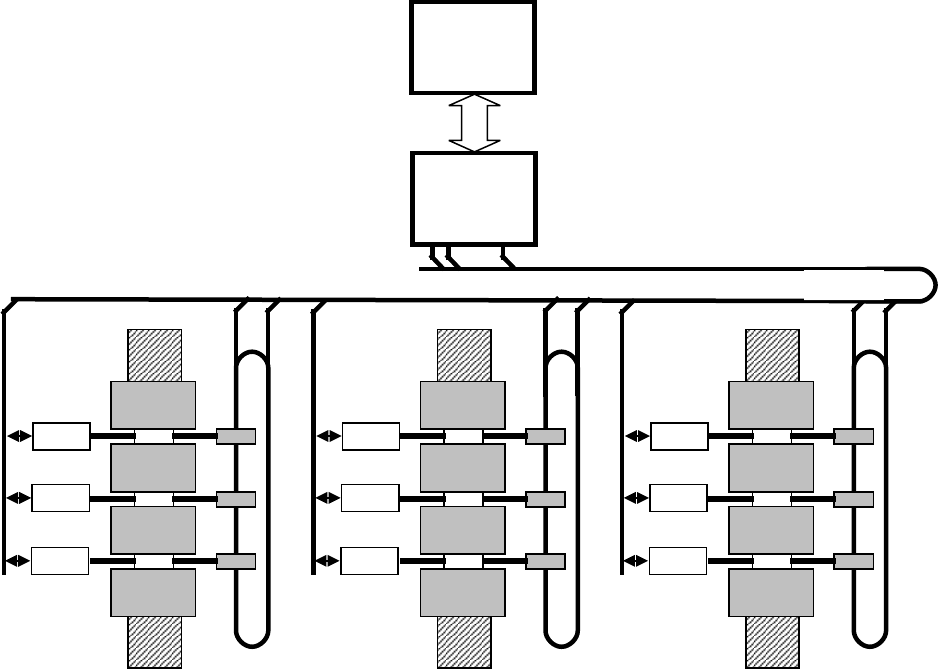
На рис. 27 и 28 показаны соответственно система управления УПП
обычная и «распределенная».
Рис. 27.
В обычной системе управления блок формирователя импульсов БФИ
находится на одной плате с МПСУ и сигналы управления тиристорами
МПСУ
КСТ
КСТ
КСТ
КСТ
КСТ
КСТ
КСТ
КСТ
КСТ
БФИ
тянутся длинными проводами, что снижает надежность системы по
отношению к помехам.
Силовая часть представляет последовательно включенные тиристоры,
т.к. отсутствуют тиристоры на напряжение 6кВ. Для каждого тиристора
имеется блок контроля состояния тиристора КСТ, который определяет
вышедший из строя тиристор и передает информацию о состоянии тиристора
в МПСУ.
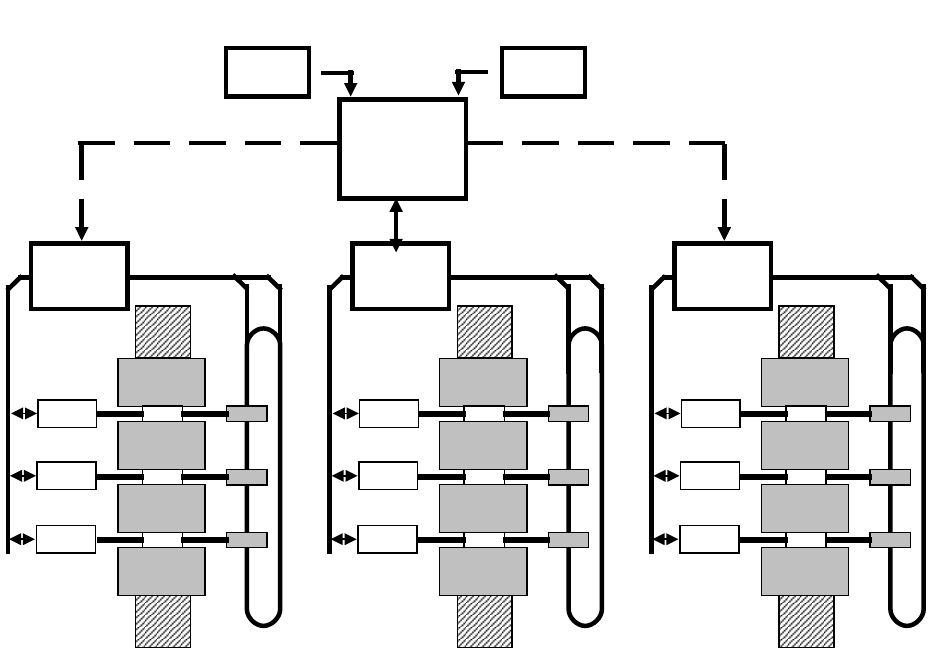
Рис. 28.
В распределенной системе формирователи импульсов находятся в
котроллерах фазы КФ, а сам импульс поступает в КФ с ЦСУ по
оптоволоконной линии, что увеличивает помехозащищенность. Блоки
контроля состояния тиристоров выполняют аналогичную функцию что и
выше. В отличие от структуры выше, информация по всем тиристорам одной
фазы поступает в контроллер фазы и далее по оптоволоконной линии в ЦСУ.
В данной структуре синхронизация осуществляется непосредственно с сети
без каких-либо трансформаторов синхронизации. Для этого применяется
КСТ
КСТ
КСТ
КФ3
КСТ
КСТ
КСТ
КФ2
КСТ
КСТ
КСТ
КФ1
ЦСУ
ДН1 ДН2
Сеть ~3х6 кВ Двигатель
датчик напряжения ДН1. Датчик напряжения ДН2 может использоваться для
реализации внешнего контура напряжения. Связь между датчиками
напряжения и ЦСУ осуществляется по оптоволоконной линии.
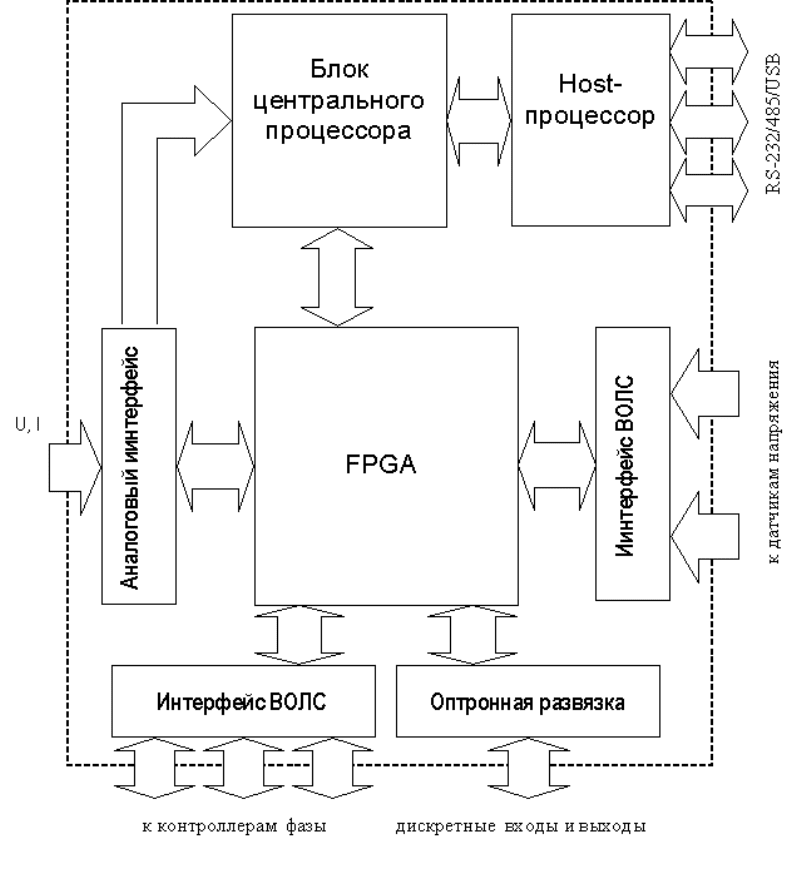
Рис. 29.
Структурная схема ЦСУ распределенной системы показана на рис. 29,
контроллера фазы – на рис. 30.
Цифровая система состоит из центрального процессора, host-процессора,
узла расширения (программируемая логическая матрица FPGA) и
аналоговых и цифровых интерфейсов. Центральный процессор выполняет
функции регулирования тока, СИФУ и общей диагностики системы. host-
процессор отвечает за каналы связи между УПП и внешними устройствами.
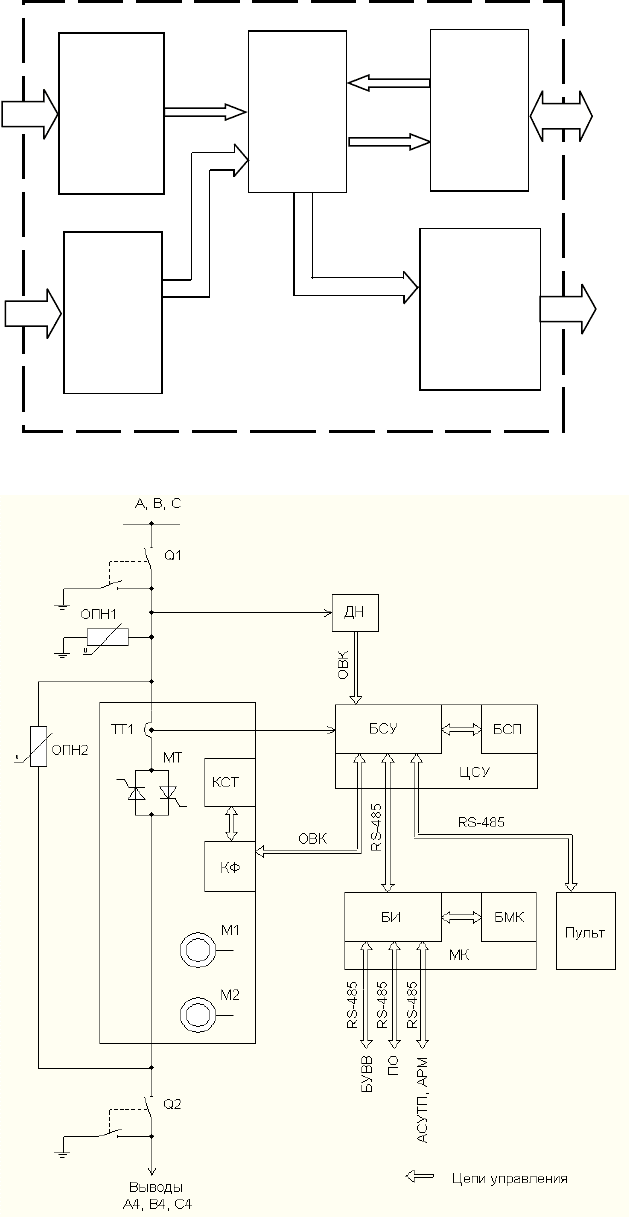
Рис. 30
Рис.31
AРМ – автоматизированное рабочее место; АСУТП – автоматизированная система управления технологическими
процессами; БИ – блок интерфейсный; КСТ – блок контроля состояния тиристоров; КФ – блок контроллера фазы; БМК
– блок микроконтроллера; БСП – блок сигнального процессора; БСУ – блок системы управления; БУВВ – блок
Микро-
контрол-
лер
ВОЛС
Data
К блоку
ЦСУ
ВОЛС
Контроль
состояния
тиристоров
Управ
ление
Монито-
ринг
питания
Питающие
напряжения
Выходные
каскады
К импульсным
трансформа-
торам
удаленного ввода/вывода; ДН – блок датчика напряжения; МК – модуль контроллера; МТ – модуль тиристорный; ЦСУ –
модуль цифровой системы управления; ОПН1, ОПН2 – ограничители перенапряжения; ОВК– оптоволоконный кабель;
ПО – пульт оператора; M1, M2 – вентиляторы; Q1, Q2 – разъединители с заземлителями; TT1 – трансформатор тока.
Контроллер фазы, кроме формирования импульсов и контроля
тиристоров, выполняет мониторинг напряжения питания и контроль
состояния оконечного каскада (токовой петли).
Функциональная схема УПП с распределенной системой управления
представлена на рис. 31.
Системы плавного пуска (СПП) на основе УПП
С целью снижения затрат применяются системы плавного пуска (СПП)
нескольких электродвигателей, подключенных к одной или нескольким
секциям шин от одного устройства УПП. СПП позволяет осуществлять как
прямой, так и поочередный безударный плавный пуск любого выбранного
электродвигателя под управлением контроллера, который исключает
возможность аварийных ситуаций, связанных с ошибочными действиями
оперативного персонала.
Система плавного пуска позволяет обеспечить:
- поочерёдный плавный пуск практически неограниченного количества
агрегатов,
-уменьшить пусковые токи электродвигателей,
-улучшить условия эксплуатации токопроводящего
электрооборудования,
-обеспечить возможность рационального и экономичного использования
оборудования.
Применение СПП позволяет получить существенную экономию по
сравнению с вариантом запуска каждого электродвигателя от
индивидуального устройства УПП. Например, при запуске 4-х
электродвигателей использование СПП обеспечивает сокращение затрат на
плавный пуск одного электродвигателя почти в 3 раза.