Садчикова Г.М. Цикловые дискретные системы управления
Подождите немного. Документ загружается.


В макстерм
)C(B
добавляется А.
.CBACBAACBCB
Записывается СКНФ.
.CBACBACBACBACBAC)B,(A,f
СКНФ
2. Переход табличным методом к совершенной форме записи. Дана
таблица истинности (табл. 5). Требуется составить СДНФ и СКНФ.
Таблица 5
Пример таблицы истинности
N A B C
F(A, B,C)
0 0 0 0 0
1 0 0 1 1
2 0 1 0 1
3 0 1 1 0
4 1 0 0 1
5 1 0 1 0
6 1 1 0 0
7 1 1 1 1
Запись СДПФ выполняется в следующей последовательности:
1. Составляются минтермы
ABC.m
;CBAm
;CBAm
C;BAm
7
4
2
1
2. Записывается дизъюнкция минтермов
ABC.CBACBACBAmmmmX
7421СДНФ
Запись СКНФ выполняется в следующей последовательности:
1. Составляются макстермы
C.BAm
;CBAm
;CBAm
C;BAm
6
5
3
0
2. Записывается конъюнкция макстермов
.CBACBACBACBAmmmmX
6530СКНФ
3. Аналитическая оптимизация переключательной функции. Дана
переключательная функция

ABBACBACBAf ),,(
.
По теореме поглощения
BACBABACBA )1(
.
По теореме склеивания
ABBABAAB )(
,
следовательно
ACBAf ),,(
1
.
4. Графическая оптимизация переключательной функции. Дана
переключательная функция в виде таблицы истинности (табл. 6)
Таблица 6
Таблица истинности
A B C f
1
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 0
1 0 0 1
1 0 1 1
1 1 0 1
1 1 1 1
На основании таблицы истинности заполняют карту Карно и
объединяют максимальное количество единиц в общий квадрат.
AB
C 00 01 11 10
0 0 0 1 1
1 0 0 1 1
Для полученного объединения записывают переключательную
функцию. Так как в данном объединении только переменная А не меняет
своего значения, то она входит в переключательную функцию. Переменная
равна единице, следовательно, в переключательную функцию переменная
А входит в прямом виде. Таким образом
ACBAf ),,(
2
.
5. Составляют проверочную таблицу соответствия (табл. 7).

Таблица 7
Проверочная таблица истинности
A B C f
1
f
2
0 0 0 0 0
0 0 1 0 0
0 1 0 0 0
0 1 1 0 0
1 0 0 1 1
1 0 1 1 1
1 1 0 1 1
1 1 1 1 1
Значения функций совпадают, следовательно, оптимизация проведена
правильно.
6. Порядок составления циклограммы можно рассмотреть на примере
системы управления станком – автоматом.
Система управления станком-автоматом должна обеспечивать работу
каждого узла или исполнительного органа по задаваемому для него циклу
и необходимую последовательность работы всех узлов в соответствии с
общей циклограммой работы их для обеспечения соответствующей
технологической операции. Каждая команда или выходной сигнал
формируется из определенных признаков, к которым относятся положение
и состояние узлов станка-автомата (в том числе и положение того узла, на
движение которого формируется команда); наличие детали на
определенной позиции; информация о предыдущем состоянии автомата;
истечение определенного промежутка времени после выполнения
некоторого движения и т. д. При выборе способов контроля положения
или состояния узлов следует применять непосредственные способы
измерения. В соответствии с этим пространственное положение узлов
необходимо контролировать датчиками положения, в качестве которых
применяют конечные выключатели или фотоэлементы. Силу, развиваемую
узлами, контролируют датчиками силы, в качестве которых применяют
реле давления (при гидравлическом приводе) или реле максимальной силы
тока (при электрическом приводе).
Необходимо синтезировать систему управления автоматического

цикла работы автомата-перекладчика, структурно-кинематическая схема
которого приведена на рис. 9. Автомат-перекладчик может быть
предназначен для различных загрузочных, сборочных, технологических
операций и состоит из двух исполнительных механизмов Y
1
и У
2
.
Циклограмма работы автомата-перекладчика имеет следующий вид:
211211
YYYYYY
. Выходные сигналы (управляющие воздействия
2211
,, YиYYY
) должны возбуждать электромагниты гидрораспределителей,
которые вызывают движение поршня гидроцилиндров в соответствующем
направлении: У
г
— выдвижение руки захвата; У, — выдвижение руки
захвата; Y
2
— перенос детали или руки захвата в позицию В; Y
%
— перенос
руки захвата в позицию А. Система управления автомата-перекладчика,
согласно циклограмме работы, должна вырабатывать соответствующие
управляющие сигналы по завершении предыдущего движения.
Информация о завершении соответствующего движения в систему
управления поступает в виде сигналов датчиков положения. В данном
случае в качестве датчиков положения использованы путевые включатели,
которые вырабатывают сигнал в тех случаях, когда упор исполнительного
механизма наезжает на них. Если вырабатывает сигнал один путевой
включатель, то другой путевой включатель не может вырабатывать сигнал.
Состояния этих двух путевых включателей можно рассматривать как
одну двоичную логическую переменную. Циклограмма работы автомата -
перекладчика приведена на рис. 10 а. и циклограмма является
нереализуемой.
7. Для того чтобы циклограмму сделать реализуемой, необходимо
ввести элементы памяти. Число совпадающих тактов М = 2, так как такты
с весами 0 и 2 встречаются 2 раза. Определяют число элементов памяти
для преобразования нереализуемой циклограммы в реализуемую: 2
S
min ≥
2; 2
S
max ≥ 3, следовательно, s
min
= 1 и s
max
= 2. Анализ циклограммы
показывает, что веса 0 и 2 тактов 3 и 4 повторяются в тактах 6 и 1. Поэтому

можно ввести один элемент памяти для различия тактов 3, 4 и 6, 1. Для
этого элемент памяти нужно включить между первым и третьим тактами и
выключить его между четвертым и шестым тактами. Реализуемая
циклограмма автомата-перекладчика дана на рис. 10 б.
8. На основании реализуемой циклограммы работы автомата -
перекладчика составляют таблицу включения (рис. 11).
а б
Рис. 10. Циклограммы: а – циклограмма работы автомата – перекладчика; б –
реализуемая циклограмма работы автомата – перекладчика
9. На основании реализуемой циклограммы работы и таблицы
включений составляют логические функции работы исполнительных
механизмов и элемента памяти: составляют полный набор Е (k + s = 3); Е =
{0, 1, 2, 3, 4, 5, 6, 7}; составляют набор А = {0, 1,2, 3, 4, 5, 6, 7}; определяют
Исполнительный
механизм
Вес
элементов
Х
1
2
0
Х
2
2
1
Вес такта
0 0 1 010
3 4 5 62
1
0 1 1 100
0 2 3 210
Номер такта
Исполнительный
механизм
Вес
элементов
Х
1
2
0
Х
2
2
1
Вес такта
1 0 0 110
3 4 5 62
1
0 0 1 100
5 4 6 710
Номер такта
Z
2
2
1 1 1 100
1 0
7 8
1 1
3
2
0 0
Выходной
и входной
сигнал
Номер такта
Y
4
2
3
4 5
6
7 8
1
Y
1

множество
AEU
Ø (пустое множество); для каждого выходного
сигнала составляют набор обязательных номеров конституент единиц:
Рис. 11. Таблица включений
.7,3,2,0;6,5,4,1
;5,2,1,0;7,6,4,3
;5,4,2,2;7,6,1,0
1212
1213
1212
1
22
11
yzyyzy
z
yzyyzy
yzyyzy
YY
YY
YY
Используя то обстоятельство, что воспринимающие выходные сигналы
могут обладать памятью, можно упростить структуру релейного
устройства. В этих случаях в качестве обязательного номера конституенты
единицы для выходной функции оставляют только вес такта включения
или выключения, а остальные номера конституент единицы переводят в
условные. Используя это положение, можно упростить систему
управления автоматом-перекладчиком, так как воспринимающим
элементом является распределитель с двусторонним управлением без
пружины и в качестве элемента памяти используют триггер. Для этого
случая функции выходных сигналов примут следующий вид:
.3,2,07;6,5,41
;5,1,02;7,1,33
;4,25,3;7,16,0
1312
1213
1212
22
11
Yzy
Z
Yzy
Z
YzyYzy
YzyYzy
YY
YY
YY
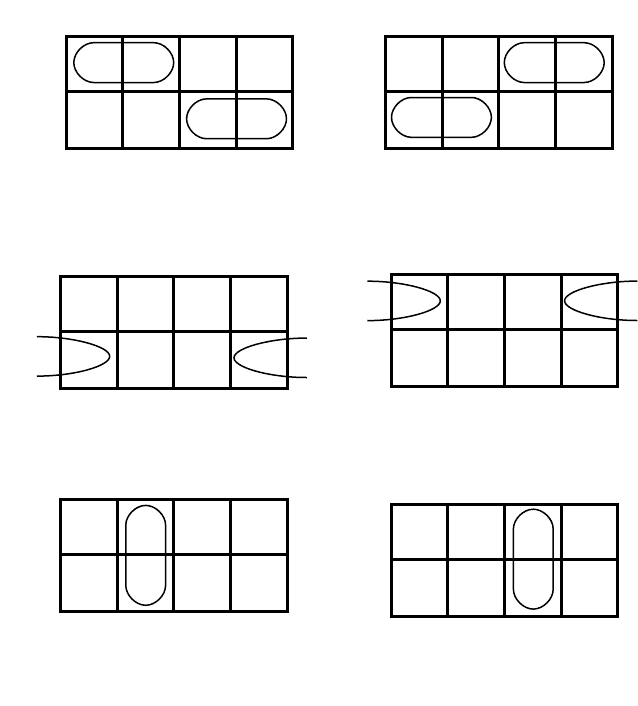
10. Карты Карно, с помощью которых проведена оптимизация
переключательных функций, приведены на рис. 12.
4. СОДЕРЖАНИЕ И ОФОРМЛЕНИЕ ОТЧЕТА ПО РАБОТЕ
Отчет оформляется в специальной тетради, ручкой или на листах
формата А4 с применением ЭВМ и должен содержать:
1. Название практической работы.
2. Цель работы.
3. Исходные данные задания №1, вычисления и полученные формулы
СДНФ и СКНФ.
4. Таблицу истинности задания №2, полученные по таблице СДНФ и
СКНФ.
5. Переключательную функцию, оптимизированную аналитическим
методом и по карте Карно проверочную таблицу истинности.
6. Исходные данные к заданию 6. Исходную и реализуемую
циклограмму.
7. Таблицу включений для реализуемой циклограммы.
8. Функции выходных сигналов.
9. Карты Карно и записи оптимизированных переключательных
функций.
00 01 11 10
У
2
У
1
1 ~
0 0
0 0
~
1
0
1
Z
Для
00 01 11 10
У
2
У
1
0
1
Z
0 0
1 ~
~ 1 0 0
Для
00 01 11 10
У
2
У
1
0
1
Z
0 0 ~ 0
1
0 ~
~
Для
00 01 11 10
У
2
У
2
У
1
0
1
Z
~
~ 0
1
0 ~ 0 0
Для
00 01 11 10
У
2
У
1
0
1
Z
0
1
0 0
~
~
0 ~
Для
00 01 11 10
У
2
У
1
0
1
Z
~ 0
~
~
0 0
1
0
Для

Рис. 12. Карты Карно
5. ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Что такое логическая функция?
2. Какие существуют формы записи логических функций?
3. Что такое минтерм? Что такое макстерм?
4. Чем отличаются ДНФ от СДНФ и КНФ от СКНФ?
5. Как записать СДНФ и СКНФ по таблице истинности?
6. Как перейти аналитическим способом от ДНФ к СДНФ и от КНФ к
СКНФ?
7. Какие условные обозначения используются в электрических схемах
для операций алгебры логики?
8. Какие существуют способы оптимизации релейных (логических)
функций?
9. Что такое реализуемая и нереализуемая циклограмма?
10. Как составляется таблица включений?
11. Как составить функции выходных сигналов по циклограмме и
таблице включений?
6. ВРЕМЯ, ОТВЕДЕННОЕ НА ВЫПОЛНЕНИЕ ЛАБОРАТОРНОЙ
РАБОТЫ
Подготовка к работе 2 акад. час
Выполнение работы 8 акад. часа
Оформление и сдача отчета 4 акад. часа
ЛИТЕРАТУРА
1. Соломатин Н.М. Логические элементы ЭВМ. -М.: Высшая школа,-
1990.
2. ГОСТ 2.743 - 72. Обозначения условные графические в схемах.
Двоичные логические элементы.
3. Брюханов В.Н., Косов М.Г., Протопопов С.П. и др. Теория
автоматического управления. –М.: Машиностроение,- 2000.
СОДЕРЖАНИЕ
1. Основные понятия.................................................................................2
1.1. Алгебра релейных цепей....................................................................4
1.2. Постулаты алгебры релейных цепей................................................6
1.3. Формы записи релейных (логических) функций.............................7
1.4. Переход от таблицы истинности к СДНФ и СКНФ......................10
1.5. Аналитические способы перехода от нормальной к совершенной
форме логической функции.........................................................................10
1.6. Оптимизация переключательных функций...................................11
1.7. Построение многотактных релейных устройств...........................12
2. Задание..................................................................................................17
3. Пример выполнения задания..............................................................20
4. Содержание и оформление отчета по работе...................................27
5. Вопросы для самопроверки................................................................28
6. Время, отведенное на выполнение практической работы...............29
Литература................................................................................................29