Roy K.K. Potential theory in applied geophysics
Подождите немного. Документ загружается.

17.11 Minimum Norm Algorithm for an Under Determined Problem 589
f
T
f=ε
T
W
−1
ε =(y− xβ)
T
W
−1
(y − xβ)
=∆G
T
W
−1
∆G
T
. (17.117)
When the observations are independent and the errors are uncorrelated, all
the covariance terms will be zero and the variance – covariance matrix will
simply be a diagonal matrix.
Therefore the weighted least squares estimator can be written as
∧
∆P =
X
T
W
−1
X
−1
X
T
W
−1
∆G (17.118)
and weighted ridge regressions estimator can be written as
∧
∆P
∗
=
X
T
W
−1
X+K I
−1
X
T
W
−1
∆G. (17.119)
Here the data are weighted by the inverse square root of the data variance-
covariance matrix. (Inman, 1975).
The covariance matrix is given by
V=σ
2
X
T
W
−1
A
−1
(17.120)
where
σ
2
=
∆G
T
W
−1
∆G
n − m
. (17.121)
Here σ
2
is termed as the residual variance and n and m are respectively
the number of data points and number of parameters to be retrieved. The
parameter standard error or the parameter uncertainly is defined as the square
ro ot of the diagonal elements of the parameter variance-covariance matrix.
Thus
√
V
11
,
√
V
22
......... etc. the parameter uncertainties are added to the
retrieved model parameters i.e., the estimated parameters will now be written
as
m
1
±
V
11
,
m
2
±
V
22
, .....etc.
Data variance covariance matrix W is assumed to be a diagonal variance
matrix with zero or negligible off diagonal covariance part.Reciprocals o f the
standard deviations are data weights and is given by
W=(1/σ
1
, 1/σ
2
, 1/σ
3
, 1/σ
4
, ·······························1/σ
N
)
where variance is square of standard deviation.
17.11 Minimum Norm Algorithm for an Under
Determined Problem
17.11.1 Norm
Norm i s a measur e of distance or length i.e., the distance between d
Obs
and
d
Pre
or m
Prior
and m
true
. For each observations, one defines a predictable error
or misfit
590 17 Inversion of Potential Field Data
e
i
=d
Obs
i
− d
Pr e
i
.
The best line is the one with smallest over all error E.
E=
n
i=1
e
2
1
=e
T
e.
This exactly is the squared Euclidean length. In the parameter domain L =
n
4
i=1
m
2
i
= m
T
m. Here E and L are respectively the square of sum of the
lengths in the data and parameter domains. Here m
i
= m
true
i
− m
Pr ior
i
for
the ith parameter. The norm is indicated by double bar i.e., E = e.The
L
1
,L
2
,L
3
-----------L
α
norms are defined as
L
1 norm
= e
1
=
)
n
i=1
|e|
1
*
(17.122)
L
2norm
= e
2
=
)
n
i=1
|e
i
|
2
*
1/2
(17.123)
L
nnorm
= e
n
=
)
n
i=1
|e
i
|
n
*
1/n
(17.124)
L
∞ norm
= e
∞
=max|e
i
| (17.125)
Successive higher norms give larger weightage to the largest element of e.
Therefore L
∞
norm is the highest value of e
i
.
17.11.2 Minimum Norm Estimator
William Menke (1984) discussed this algorithm fo r solving underdetermined
problems using Lagrange multipliers. Underdetermined problems are those
where the number of data points are less than the number of unknown param-
eters to be determined. Underdetermined problems have generally infinite
number of solutions. It is difficult to ch oose the correct one out of many. That
is why some additional information k nown as a priori information are neces-
sary to interprete an underdetermined inverse problem. Lagrange multipliers
maximizes or minimizes a certain function using a constraint equation.
Here in this problem we have to find a model m
estimated
or m
est
that
minimizes
L = m
T
m =
m
2
e
(17.126)
subject to the constraint equation that e = d − Gm = 0
where e is the error. The inverse problem is d = Gm. This problem can be
solved using Lagrange multiplier. We can minimize the function
17.11 Minimum Norm Algorithm for an Under Determined Problem 591
φ (m) = L +
N
i=1
λ
i
e
i
(17.127)
φ (m)=L +
N
i=1
λ
i
e
i
=
M
i=1
m
2
i
+
N
i=1
λ
i
)
d
i
−
M
G
i
m
i
J=1
*
(17.128)
where λ
I
is the Lagrange multiplier, G
ij
is the frechet kernel. Taking the
derivations with respect to m
q
,weget
∂φ
∂m
q
=
M
i=1
2
∂m
i
∂m
q
.m
i
−
N
i=1
λ
i
M
j=1
∂m
i
∂m
q
(17.129)
=2m
q
−
N
i=1
λ
i
G
iq
. (17.130)
Taking
∂φ
∂m
q
=0,
we get
2m = G
T
λ (17.131)
in matrix notation. Taking the constraint equation Gm = d, and substituting
this equation in (17.101), we g et
d=Gm=G(G
T
λ/2). (17.132)
The matrix GG
T
is an N×N matrix. If its inverse exists then we get the value
of the Lagrange multiplier as
λ =2
GG
T
−1
d. (17.133)
The expression for the minimum norm estimator for an under determin ed
problem is
m
est
=G
T
G
T
G
−1
d
=G
−g
d. (17.134)
G
−g
is a generalized inverse for an under determined problem. Whatever pre-
scriptions are made for least squares estimator for an over determined problem
regar d in g use of Marquardt’s coefficient to handle zero and very small eigen
values of the system matrix are also valid for under determined problems. The
least squares and minimum norm generalized inverses are respectively given
by
G
−g
=
G
T
G
−1
G
T
(Least Squares) (17.135)
and
592 17 Inversion of Potential Field Data
G
−g
=G
T
GG
T
−1
(Minimum norm) (17.136)
Generalized inverse gives m
estimated
or m
est
=G
−g
d
obs
from d = Gm. There-
fore we can write d
Pre
=Gm
est
=G(G
−g
d
obs
)=(GG
−g
)d
obs
.
=Nd
obs
. (17.137)
The n × n square matrix N = GG
−g
is called the data resolution matrix.
The diagonal elements of this matrix give a quantitative idea about the data
importance.
Data importance n = diag(N).
Similarly model resolution matrix
m
est
=G
−g
d
obs
=G
−g
'
Gm
true
(
(17.138)
=
'
G
−g
G
(
m
true
=Rm
true
. (17.139)
Here R is m × m model resolution matrix. If R = 1 , then ea ch model is we ll
determined. Like N, it is also a diagonally dominant matrix.
Information density matrix uu
T
=I
n
and resolution matrix vv
T
=I
n
has
some similarity with N and R respectively. But the values do not come exactly
same. uu
T
=I
n
and N = GG
−g
are in data space, vv
T
=I
m
and R = G
−g
G
are in the model space.
Dirichlet’s spread functions are defined as
Spread = (N) = N −I =
N
i=1
N
j=1
[N
ij
− I
ij
]
2
(17.140)
Spread = (R) = N −I =
M
i=1
M
j=1
[R
ij
− I
ij
]
2
. (17.141)
The spread qualitatively indicates the quality of inversion. Large r the spread
worse will be the inverted model. n and m are respectively the number of data
points and number of parameters. I is the identity matrix therefore I
ij
=0.
17.12 Bachus – Gilbert Inversion
17.12.1 Intro du ction
Bachus – Gilbert theory of inversion isalsoamemberofthelinearinverse
theory. But the approach is significantly different from those we have discussed
so far. Here we describe and apply a method of finding the resolving power of
a finite set of data when these data are used to construct an earth model.
Bachus – Gilbert’s theory say that if we can construct an inverse problem
such that when we try to find out the physical property of the earth at a
17.12 Bachus – Gilbert Inversion 593
depth z
0
say (m)
Z0
, then the mathematical system should pickup maximum
information from that depth z
0
and very little information from above and
below that depth. In other words if we can construct a ke rnel which have dirac
delta type behaviour, then only it will be possible to pick up in formation
only from one depth. With finite numb er of data, it is not possible to get
such a sharp dirac delta type kernel. B-G named this kernel as an averaging
kernel A(z, z
0
). It not only picks up information from that depth z
0
but also
carries some information from depths ab ove and below. This averaging kernel
has certain width or spread. Lower the spread, sharper will be the pick of
the averaging kernel. B-G made the mathematical formulation in such a way
that they tried to minimize the spread using Lagrange multiplier and using
the constraint equation. i.e., the area under the averaging kernel in equal to
unity. So the deltaness criterion of the averaging kernel and minimization of
the spread function go together at all depths and the model parameter m
Z0
is determined. Gradual increase of the B-G spread function with depth will
roughly tell about the depth upto which the earth model could be estimated
with a certain degree of certainty using a finite number of data.
17.12.2 B-G Formulation
The imp ortant advantages of the B-G method are (i) layered earth approx-
imation is not required. The physical property say resistivity o r density is
a function of the depth z only i.e. ρ =f(z)atthepointofmeasurement.
Therefore data collected over a complicated Archean-Proterozoic geological
terrain can also be inverted using B-G a p p roach (ii) depth of explor ation of
the D.C resistivity, electromagnetic and magnetotelluric sounding data can
be estimated from B-G spread function.
B-G assumed that the earth functionals are linear and they are fre’che’t
differentiable. Therefore the linear earth functionals g
1
,g
2
,......g
N
(field
data) can be connected to the earth model parameter through the Fredhom’s
integral of the first kind i.e.
g
i
(m) =
Z
Z
0
G
i
(z) m (z) dz (17.142)
where G
i
(z) is a known function of z because g is a known linear functional.
So the inverse problem is what can we say about m(z) at z = z
0
when all
we know is a set of g
1
,g
2
,......g
N
collected on the surface of the earth. We
try to compute m
Z0
which is the average value of m taken within a short
interval z
0
± ∆z
0
. These local averages are the model value at a particular
depth z
0
within the resolving length z
0
+∆z
0
to z
0
− ∆z
0
. B-G defined the
local average using the averaging kernel in the form
m
z0
=
zmax
z0
A(z
0
, z) m (z) dz (17.143)
594 17 Inversion of Potential Field Data
where averaging kernel assumed to be unimodular and it is
zmax
z
A(z
0
, z) dz = 1. (17.144)
The averaging kernel A is distributed in z i.e., at depths where we shall try
to compute m(z), we shall have to compute the averaging kernel to examine
the quality of inversion based on the strength of the data. Data quality and
adequacy improves the quality of A. Theoretically the nature of A should be
unimodular, for practical probl ems when the data contains noise, A can show
multimodular nature and spread may incr ease very fast. Ideally A (z
0
, z) =
δ(z − z
0
)whereδ is the Dirac delta distribution. With only a finite number
of field data, available for computing m
Z0
, we should not expect the local
average to be so localized.
We assume that the average m
Z0
, whatever it turns out to be, depends
only on g
1
(m), g
2
(m) ......g
N
(m).
Since m
Z0
and g
1
(m), g
2
(m) ......g
N
(m) have linear relation, we can
write
m
Z0
=
N
i=1
a
i
(z
0
)g
i
(m) (17.145)
These coefficients depends on the depth z
0
. At each depth we have to find out
these coefficients a
i
(z
0
)toestimatem
Z0
and the additional constraint is
A(z
0
, z) =
N
i=1
a
i
(z
0
)G
i
(z) . (17.146)
So we have to determine the a
i
(z
0
) at all depths such that it satisfies (17.143)
(17.144) (17.145). B-G chose a function K (z
0
, z) which vanishes at z = z
0
and
increases on b oth the sides of z
0
. B-G chose the function
K=12
∞
0
(z − z
0
)
2
A
2
(z, z
0
)dz. (17.147)
Here the factor 12 in (17.147) is used so that the spread b ecomes equal to
width of the averaging kernel. We can write the value of K from (17.147) and
(17.146) in the form
K=
N
i=1
N
j=1
a
i
a
j
⎧
⎨
⎩
12
∞
0
(z −z
0
)
2
G
i
(z) G
j
(z) dz
⎫
⎬
⎭
(17.148)
=
N
i=1
N
j=1
a
i
a
j
S
ij
. (17.149)

17.12 Bachus – Gilbert Inversion 595
In the matrix form
K=a
t
S a (17.150)
where S = S
ij
.
K is interpreted as the spread around z
0
(Oldenburg 1979). The matrix S is
called the spread matrix. The elements of matrix S can be written i n simpler
computational form as
S
ij
=12
∞
o
(z − z
0
)
2
G
i
(z) G
j
(z) dz (17.151)
=
⎡
⎣
12
∞
0
z
2
G
i
(z) G
j
(z) dz
⎤
⎦
− 2z
0
⎡
⎣
12
∞
0
zG
i
(z) G
j
(z) dz
⎤
⎦
+z
2
0
⎡
⎣
12
∞
o
G
i
(z) G
j
(z) dz
⎤
⎦
. (17.152)
The construction of the averaging Kernel requires computation of averaging
coefficients a
j
(z
0
), (i = 1, 2,.........N) around the depth of interest. These
coefficients are determined minimizing the spread using Lagrange multiplier
and using the constraint i.e., the area under the averaging kernel is equal to
unity. We can write (17.148) in the form
N
i=1
∞
0
a
i
(z
o
)G
i
(z) dz = 1 (17.153)
⇒
N
i=1
a
i
u
i
= 1 (17.154)
where
u
i
=
∞
0
G
i
(z) dz. (17.155)
Andinthematrixformwecanwrite
⇒ a
t
u=1. (17.156)
The minimization of ‘a
t
S a’ under the constraint a
t
u = 1 using Lagrange
multiplier technique solves the problem of determining coefficients of the aver-
aging kernel. Applying this technique, the condition for minimization of the
spread with respect to a is
∂
∂a
i
)
N
i=1
N
J=1
a
i
a
j
S
ij
− λ
′
a
i
u
i
− 1
*
= 0 (17.157)

596 17 Inversion of Potential Field Data
where λ
′
is the Lagrange multiplier
and when i = j, a
i
a
j
=a
2
i
and
∂
∂a
i
=2a
i
. Therefore
2
N
j=1
a
i
S
iJ
− λ
′
u
i
= 0 (17.158)
where
λ =
λ
′
2
.
In the matrix form
Sa− λ u=0
⇒ a=λ S
−1
u. (17.159)
Since
a
t
u=1
⇒ λ u
t
S
−1
u=1
⇒ λ =
1
u
t
S
−1
u
. (17.160)
Hence
a=S
−1
u/(u
t
S
−1
u). (17.161)
Equations (17.159) and (17.161) shows respectively the values of the Lagrange
multipliers and the coefficients of the averaging kernel which minimizes the
spread. The corresponding model estimate is given by
m
z0
=a
t
d
=
u
t
S
−1
d
u
t
S
−1
u
(17.162)
and the averaging kernel is determined as
A(z, z
0
)=
a
t
G(z)
u
t
S
−1
u
. (17.163)
Thus all the parameters of B-G inversion are obtained. But one problem is
yet to be solved i.e. how to determine the fre’che’t kernel G (z). Oldenburg
(1978 and 1979) have shown the procedure for determination of G (z) for
d.c resistivity and magnetotelluric inversion applying B-G method. In the
presence of noise, the s pread matrix ‘S’ is replaced by W in the form.
W=(1− α)S + α Cov (m). (17.164)
Here error in the model estimate is related to the error in the data. The
variance in the estimated model is considered as a measure of error. Covariance
17.13 Stochastic Inversion 597
matrix is constructed and a fraction of that is taken in the modified spr ead.
α is a fraction. It varies from 0 to 1. For very good quality data α =0,
and W = S. With increase in noise α increases. α = 1 for totally noisy
data. The averaging coefficients are obtained by minimizing a
t
Wainsteadof
a
t
S a. The coefficients thus obtained are the functions of α. The procedure
for minimizing W is the same as that for S. A trade off between resolution
and the variance-covariance is made for optimum choice of α.
In B-G inversion no initial choice of the model parameter is necessary.
Therefore it can be used for any kind of complicated geology. Any physical
property is assumed to be just a function of depth. One can see the strength of
the data and the quality of inversion from the nature of the averaging kernel.
One can directly see the depth of investigation of the data. Beyond a certain
depth, the B-G spread function explodes i.e., the spreads start increasing at
a very faster rate. That dictates the depth upto which the data could see the
subsurface.
17.13 Stochastic Inversion
17.13.1 Intro du ction
In this inversion approach most of the basic ingradients of inversion are
viewed from the angle of probility density functions although it is basically
a dual minimization approach. Instead of minimizing the error function in
successive iteration we maximize the probability density function assum-
ing Gaussian distribution for linear and linearisable problems. Some of the
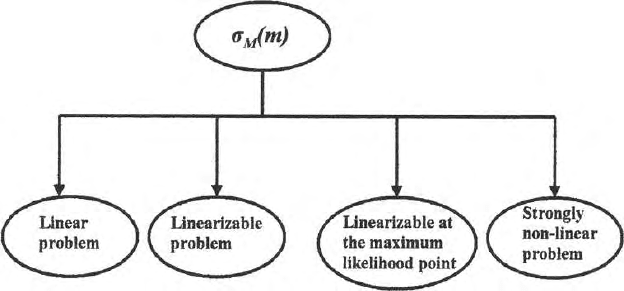
ideas o f Tarantola (1987) are described very briefly. Four classes of problems
(Fig. 17.10) viz, linear, linearisable, nonlinear but linearisable at the maximum
Fig. 17.10. Four classes of an inverse problems (a) linear (b) non linear but linearis-
able (c) nonlinear but linearisable at the maximum likelihood point (d) nonlinear
and not linearisable

598 17 Inversion of Potential Field Data
likelihood point and strongly nonlinear problems and three classes of prob-
ability density functions viz, joint probability density function, conditional
probability density function and marginal probability density function are
used (Freund and Walpole,1987). Since most of the geophysical problems are
nonlinear we work mostly with last three classes of problems. It has already
been mentioned that one linearises a nonlinear problem by truncating higher
order terms of the Taylor’s series expansion. The quantum of error present in
this approximation dictates the degree of nonlinearity of a problem. Higher
the degree of nonlinearity more will be the deviation of the nature of the prob-
ability density function from the Gaussian nature. In the stochastic domain
the existence of an inverse problem is connected with the existence of marginal
probability density function. Here there are more of mixing of information in
the (D × M) parameter space collected from the data (D) and Model (M)
spaces.
Errors due to modeling, instrumentation is expressed in the form of joint
probability density – functions θ(d, m) and ρ(d, m). Here ‘d’ stands for data
and m stands for model. ρ(d, m) is a mixture of information from ρ(d) and
ρ(m) where ρ(d) is the probability density function due to the data error
(d
obs
− d
Pre
)andρ(m) is the probability density function due to modeling
error (m
Prior
−m
true
). These probabilities are described in the form of Gaus-
sion distribution. These probabilit ies are combined to form a joint probability
density function. σ(d, m). It is the starting point of stochastic inv e rsion. From
σ(d, m), we find out the marginal probability density functions σ
M
(m) in the
model space and σ
D
(d) in the data apace. Since geophysicists are mostly inter-
ested to get models from a set of data, therefore, we are interested in σ
M
(m),
the marginal probability density function in the model space. It extracts all
information about the model from the joint a posteriori probability density
function σ(d, m). Figure 17.11 is a curtoon of stochastic inversion scheme.
Error due to modeling will always exist. We shall never be able to choo se an
earth model which will exactly match with the reality. In general the chosen
model will always be much simpler than the rea l earth where the data are
collected. So there will always b e some difference between d
Pre
and d
Obs
.Even
when we get d
Obs
≈ d
Pre
in an iterative process there is no guarantee that we
obtained all the subsurface features in the earth model and in fact we retrieve
a much simpler model. E rror due to instr umentation was severe in earlier days.
With sophistication in instrumentation in modern day digital electronics, error
due to instrumentation has significantly gone down. Tarantola expressed these
uncertainties in modeling in the form of Gaussian probability density function
θ (d |m )=
(2π)
ND
det (C
T
(m))
−1/2
∗
exp
−
1
2
(d −g (m))
t
C
−1
T
(m)(d − g (m))
.
(17.165)
Here d
Pre
=d
Cal
= g (m). For linear inverse problem we have shown already
that we li nearise at the reference point as