Попадько В.Е. Курс лекций по АТП
Подождите немного. Документ загружается.

1. Расчет САР на заданную степень затухания.
ИУ
РУ
З
Д
ОР
Xвх1
Xрег
Xвх2
Xвых
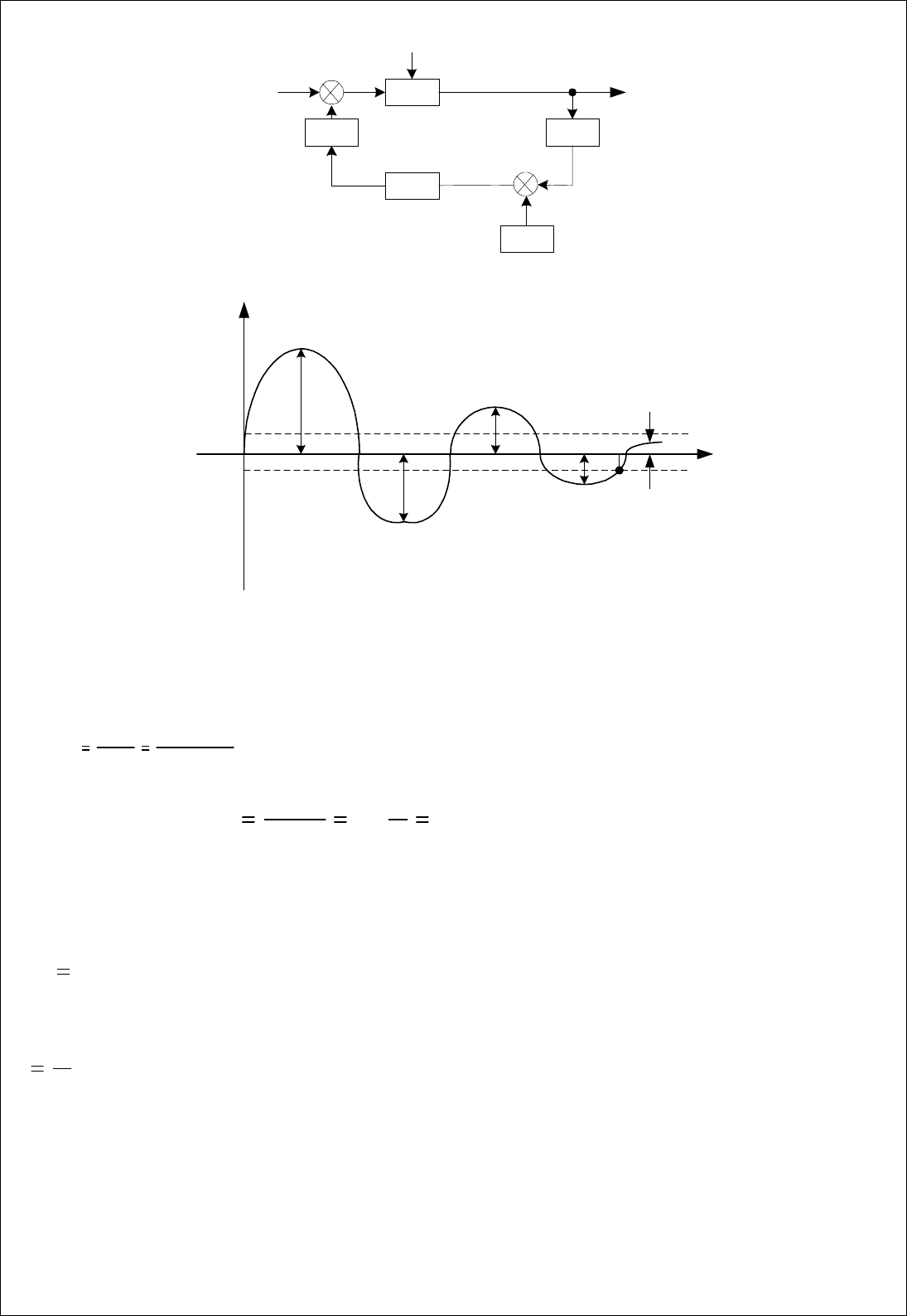
Показатели качества переходного процесса.
Х
1
Х
2
Х
3
Х
4
Хвых
1
t
tp
1. ст – статическая ошибка
2. tp – время регулирования
3. х1 – максимальная динамическая ошибка
4.
x
1
x
выхз
x
max
x
уст
x
уст
перерегулирование
5. степень затухания
x
1
x
3
x
1
1
x
3
x
1
1 e
2 m
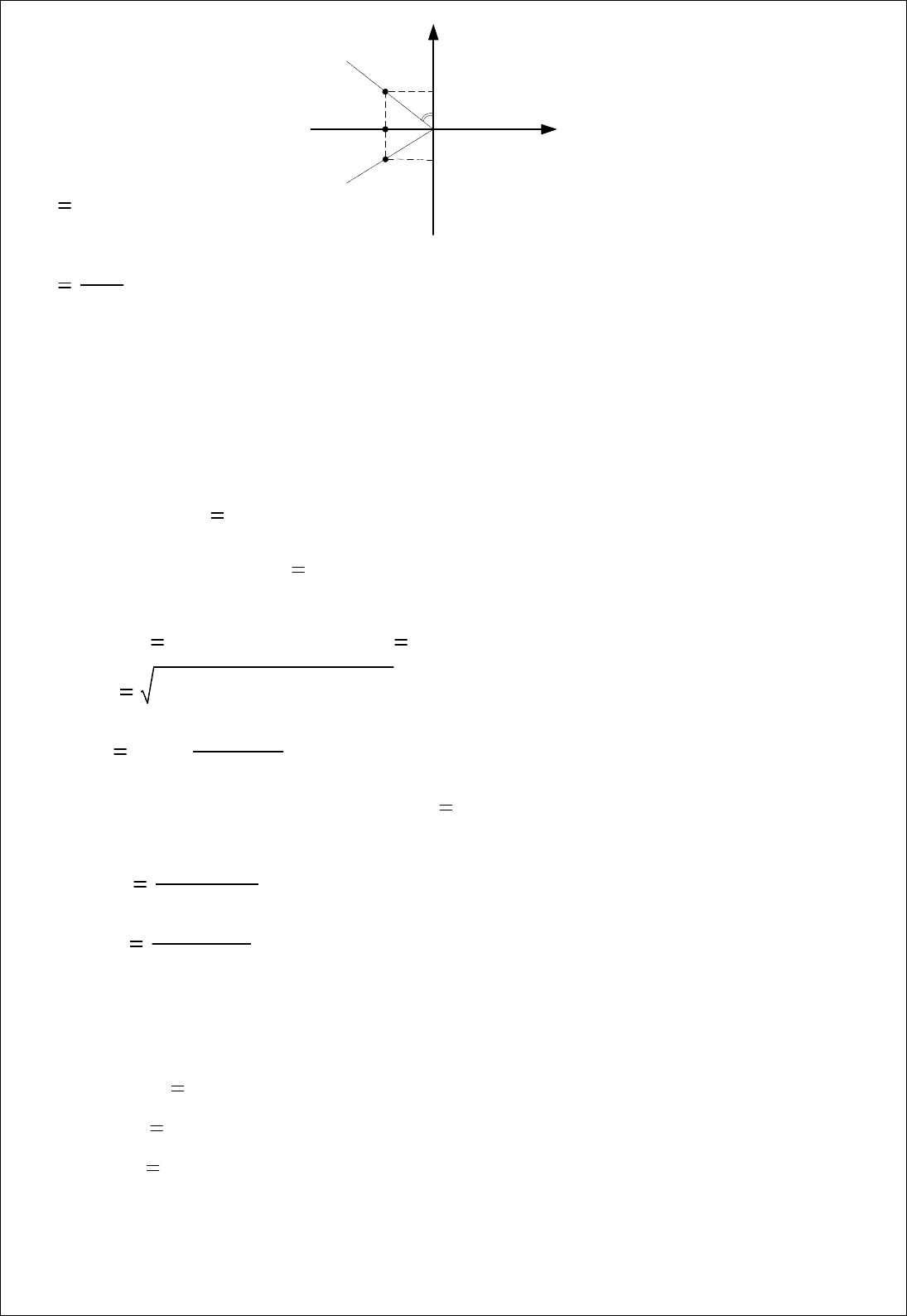
Метод расширенных АФХ.
Решение однородного линейного дифференциального уравнения имеет вид:
x
вых
1
n
i
A
i
e
p
i
t
если среди корней есть p
i
=-αjw
m
w
p
i
=-mwjw
x
вых
1
n
i
A
i
e
m w t
cos w t( )
jw
-jw
-mw
jw
α
γ
А
О
В
tg
m w
w
Характеристика системы, когда вместо оператора р подставляется p=-mwjw,
обозначается W(m,jw) и называется расширенной АФХ системы.
Совокупность параметров настройки регулятора, обеспечивая расположение корней
характеристического уравнения на контуре АОВ образует в плоскости параметров
настройки регулятора внутри области устойчивости так называемую линию равной
степени затухания.
Характеристическое уравнение системы обычно имеет вид:
Wрег p( ) Wоб p( ) 1 0
Запишем РАФХ:
Wрег m 1j w( ) Wоб m 1j w( ) 1
В показательной форме:
Wоб m j w( ) Re m w( ) j Im m w( ) Aоб m w( ) e
об m w( )
Aоб m w( ) Re m w( )
2
Im m w( )( )
2
e
об m w( )
arctg
Im m w( )
Re m w( )
Aоб m w( ) e
об m w( )
Aрег m w( ) e
рег m w( )
1
Отсюда видно:
Aрег m w( )
1
Aоб m w( )
рег m w( )
1
об m w( )
Методика расчета параметров настройки регулятора по методу РАФХ:
1. задаемся степенью затухания: ψ→m
2. записываем выражение для РАФХ объекта в показательной форме
Wоб m j w( ) Aоб m w( ) e
об m w( )
Aоб m w( ) Fоб m w k1 T1 T2
об m w( ) об m w k1 T1 T2
3. записываем выражение для РАФХ регулятора в показательной форме
Wрег m j w( ) Aрег m w( ) e
рег m w( )
Aрег m w( ) Fрег m w k1 T1 T2
рег m w( ) рег m w k1 T1 T2
4. Приравниваем амплитуды и фазы объекта и регулятора:
рег m w( ) рег m w k1 T1 T2
Fрег m w k Tи Tп( )
1
Fоб m w k Tи Tп( )
рег m w k Tи Tп( )
1
об m w k Tи Tп( )
5. Решение системы уравнений относительно двух параметров относительно Ти и К
представляем в виде:
1
Ти
k
1
Ти
f1 m w k1 T1 T2 Тп
k f2 m w k1 T1 T2 Тп
6. Подставляем численные значения k1, T1, T2, τ, m
1
Ти
f1 w Tп( )
k f2 w Тп( )
7. Для регулятора с двумя параметрами настройки, системы решения пункта 6
представляется на плоскости и называется линией равной степени затухания.
w=0 w
cр
область
устойчивости
1
Ти
к
8. Для ПИД-регулятора, задавшись численными значениями времени предварения
Тп=const, строят семейство линий равной степени затухания, которые образуют
поверхность равной степени затухания.
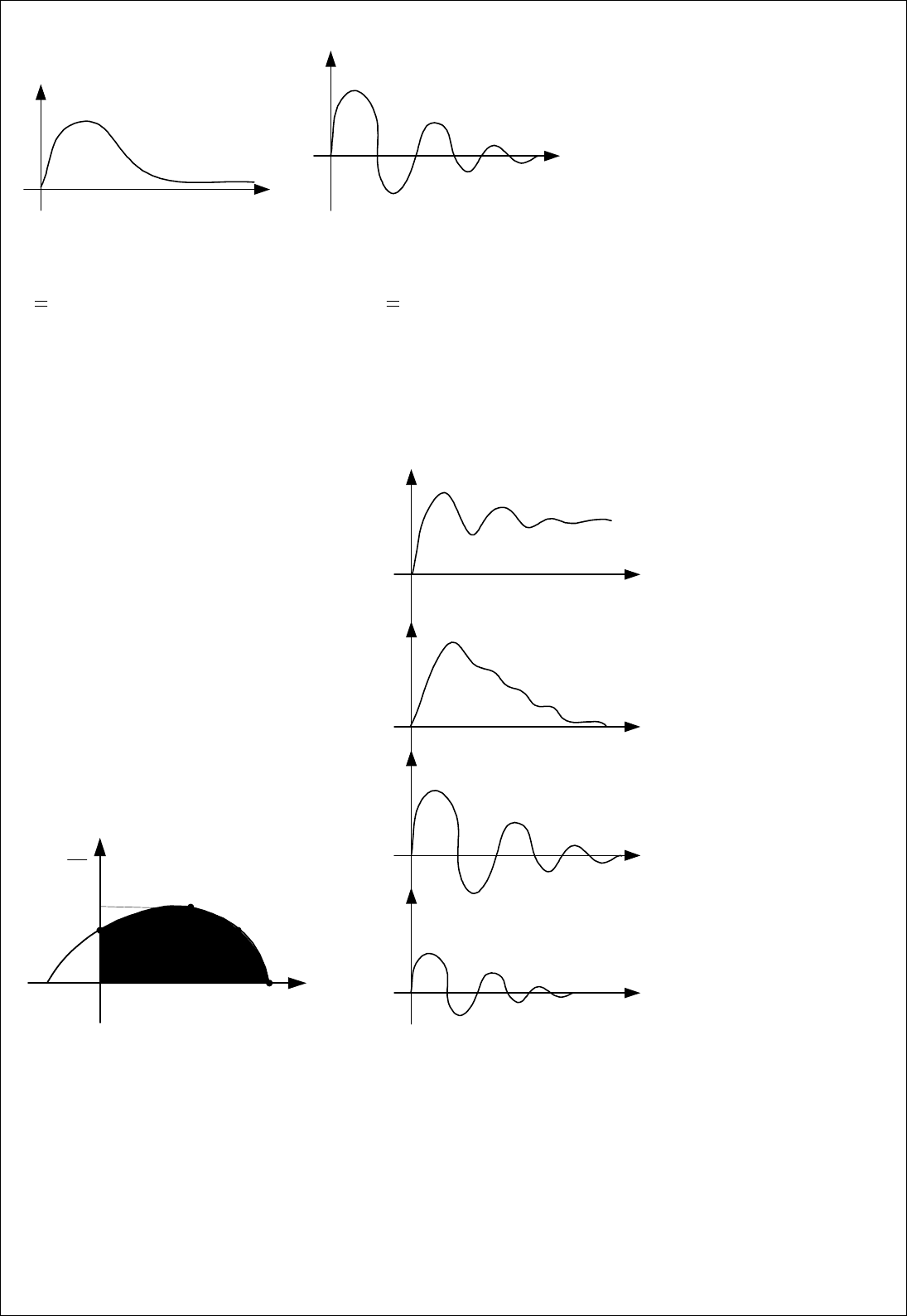
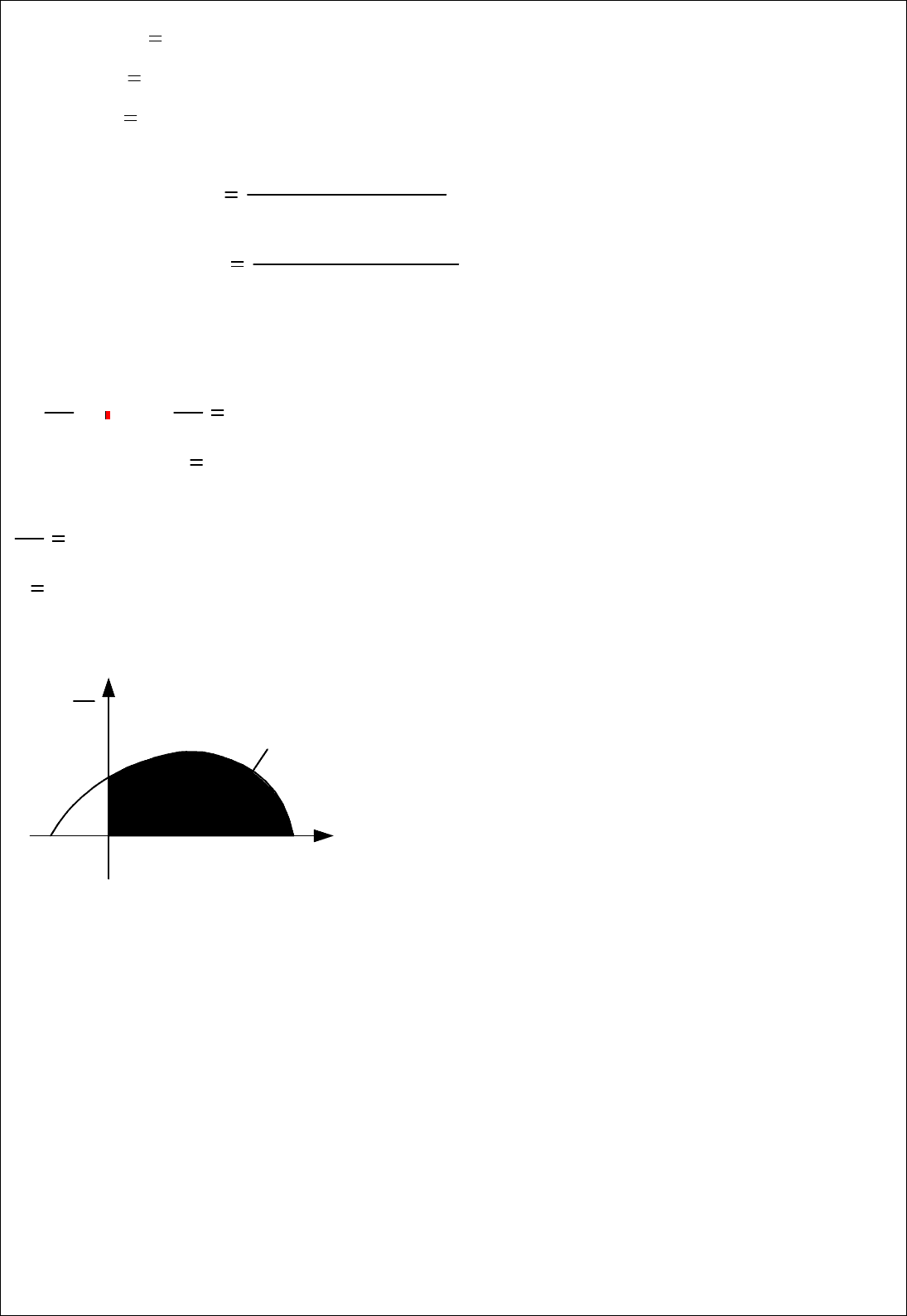
2. Расчет оптимальных настроек в одноконтурной САР
Xвых
Xвых
t
апериодическое звено колебательный процесс
J1
0
tx
вых
t( )
d
k f2 w Тп( )
J2
0
tx
вых
t( )
2
d
J – функционал, когда каждому виду функций соответствует число.
Задача поиска оптимальных параметров настройки можно было сформулировать
следующим образом: найти k*, Ти*, Тп* при которых обеспечивается минимум
функционала.
w=0 w
cр
1
Ти
к
k
опт
Т3
Т4
Т2
Т1
Xвых
t
Xвых
t
Xвых
t
Xвых
t
Т1
Т2
Т3
Т4
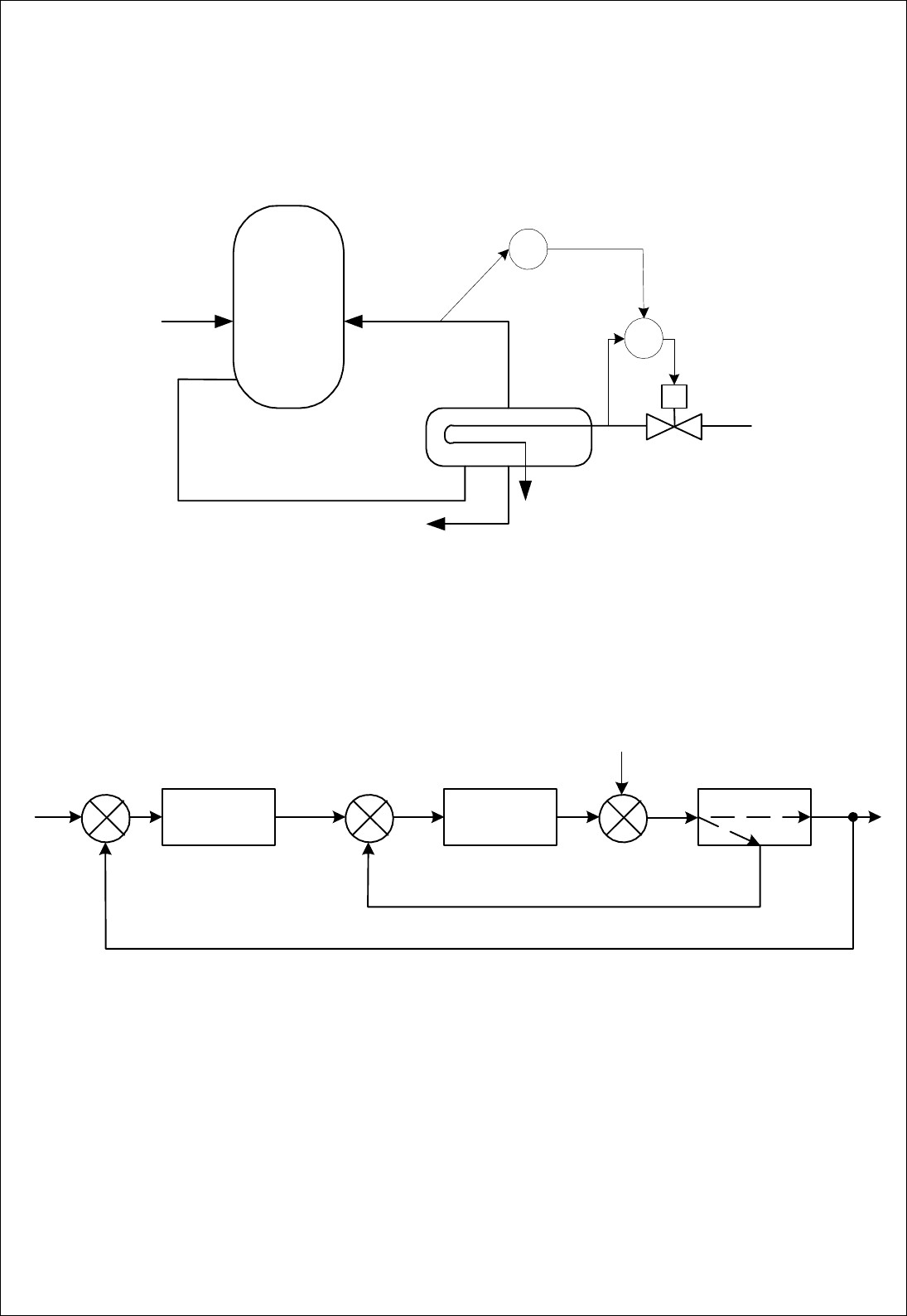
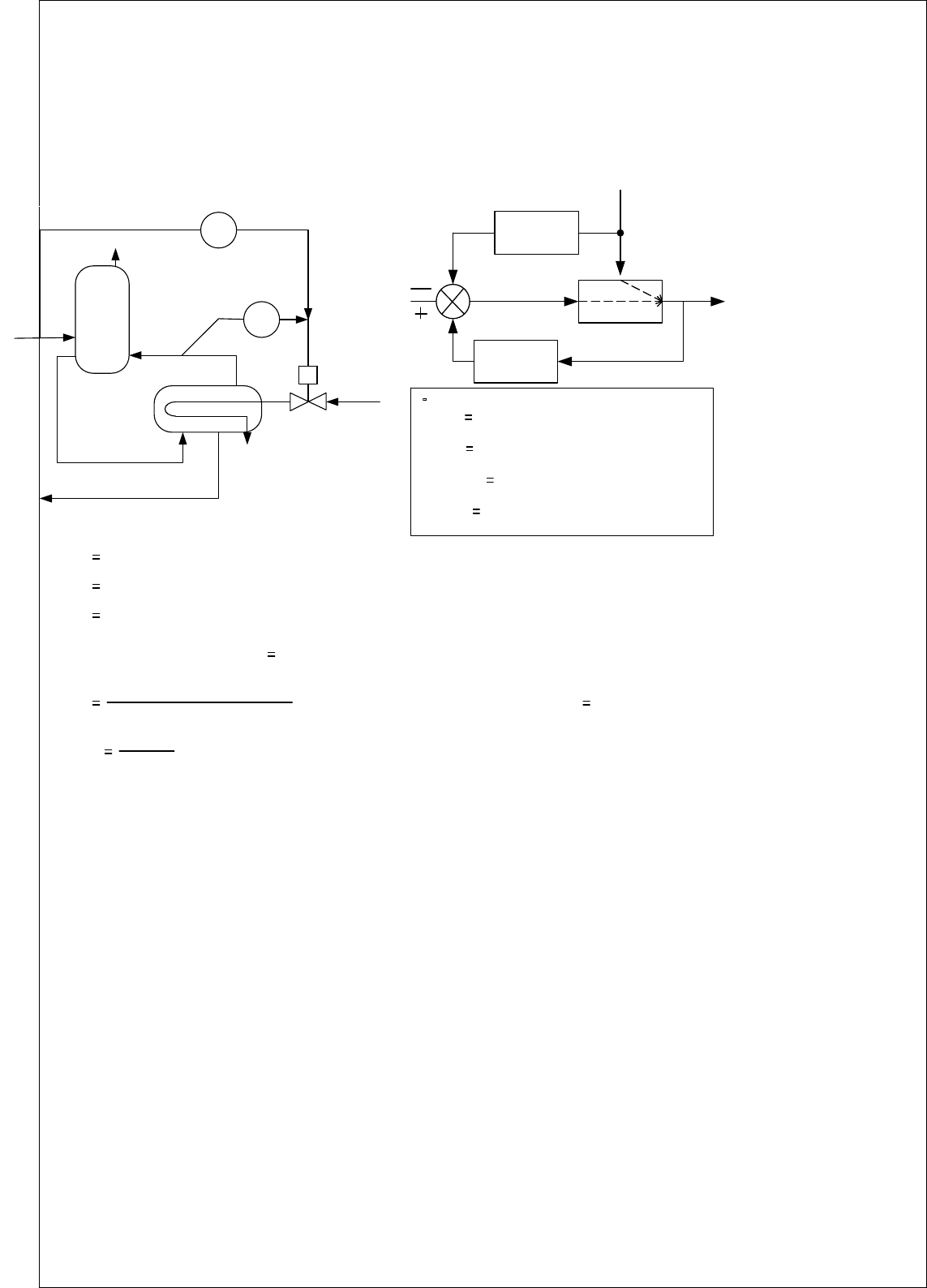
3. Понятие каскадной системы: расчет основного регулятора
Если среди вспомогательных параметров координат объекта, можно выделить такую,
которая отзывается на возмущение быстрее, чем основной регулируемый параметр, то
путем введения дополнительного контура можно построить так называемую каскадную
систему регулирования.
Каскадными принято называть системы, в которых выходной сигнал одного из
регулятора направляются в качестве задания на другой регулятор.
FC
TC
P1
P2
НДЭГ
РДЭГ
водяной
пар
В качестве параметра, который отзывается на возмущение быстрее, чем регулируемый
параметр, здесь расход.
Принцип действия каскадной системы: основные возмущения системы компенсируются
быстродействующим регулятором Р1, а оставшиеся возмущения – Р2 путем изменения
задания регулятору Р1. (Р1 – вспомогательный или стабилизирующий регулятор, Р2 –
основной или корректирующий регулятор)
Wp
2
(p) Wp
1
(p)
y
з
x
x
1
x
в
W
μ
y
μ
zW
μ – регулирующее воздействие
Wμy – передаточная функция по основному каналу
Wμz – передаточная функция по вспомогательному каналу.
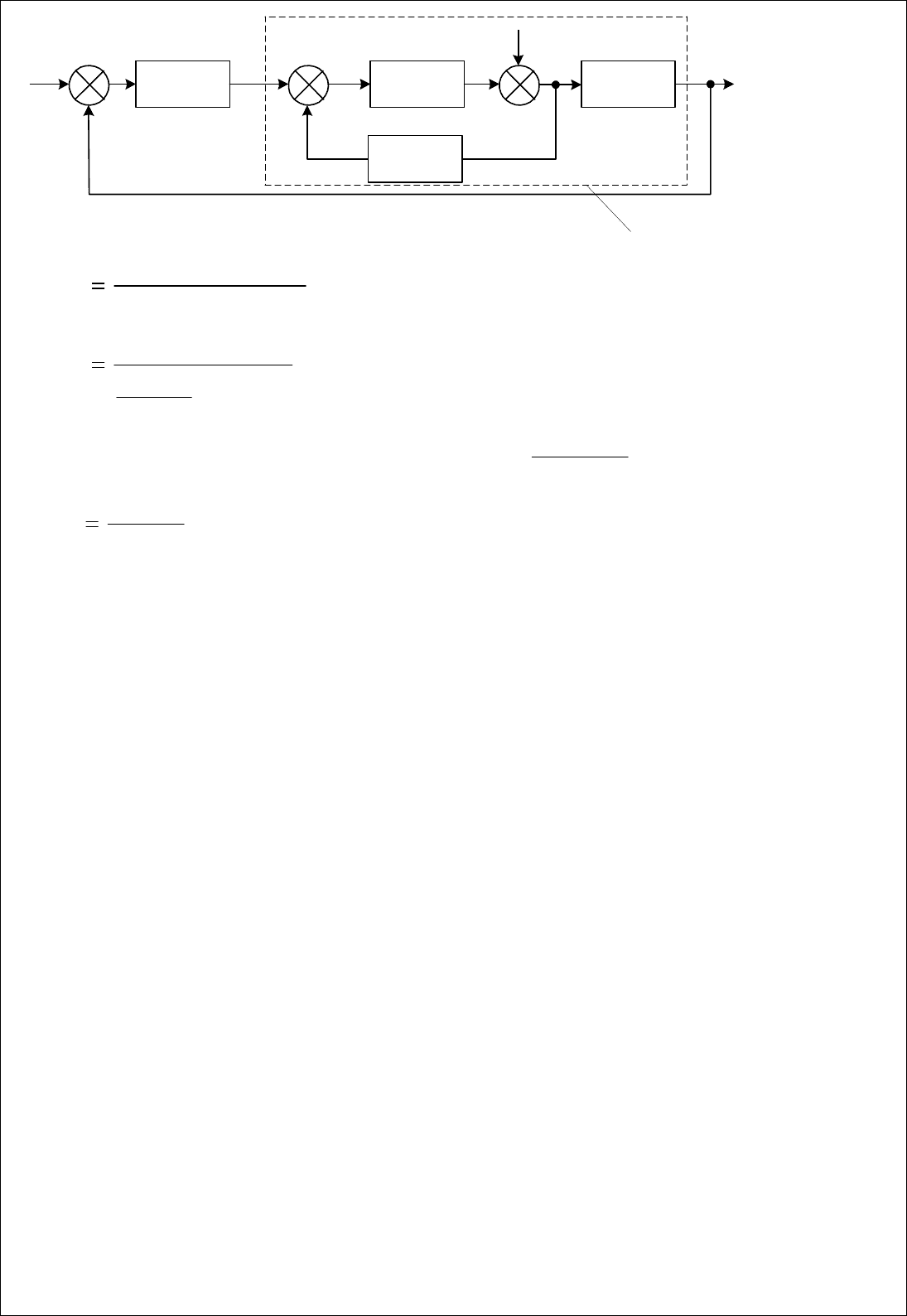
Расчет двухконтурной системы сводится к расчету двух одноконтурных систем.
Необходимо выполнение условий wр1>>wp2
Wp
2
(p) Wp
1
(p)
y
з
x
x
1
x
в
W
μ
y
W
μ
z
y
W
э2
(p)
Wэ2 p( )
Wp1 p( )
1 Wp1 p( ) Wz p( )
Wy p( )
Wэ2 p( )
Wy p( )
1
Wp1 p( )
Wz p( )
Если на рабочей частоте wp2 выполняется условие :
1
Ap1 wp2( )
Az wp2( )
Wэ2 p( )
Wy p( )
Wz p( )
Далее рассчитывают параметры настройки регулятора любым из известных методов.
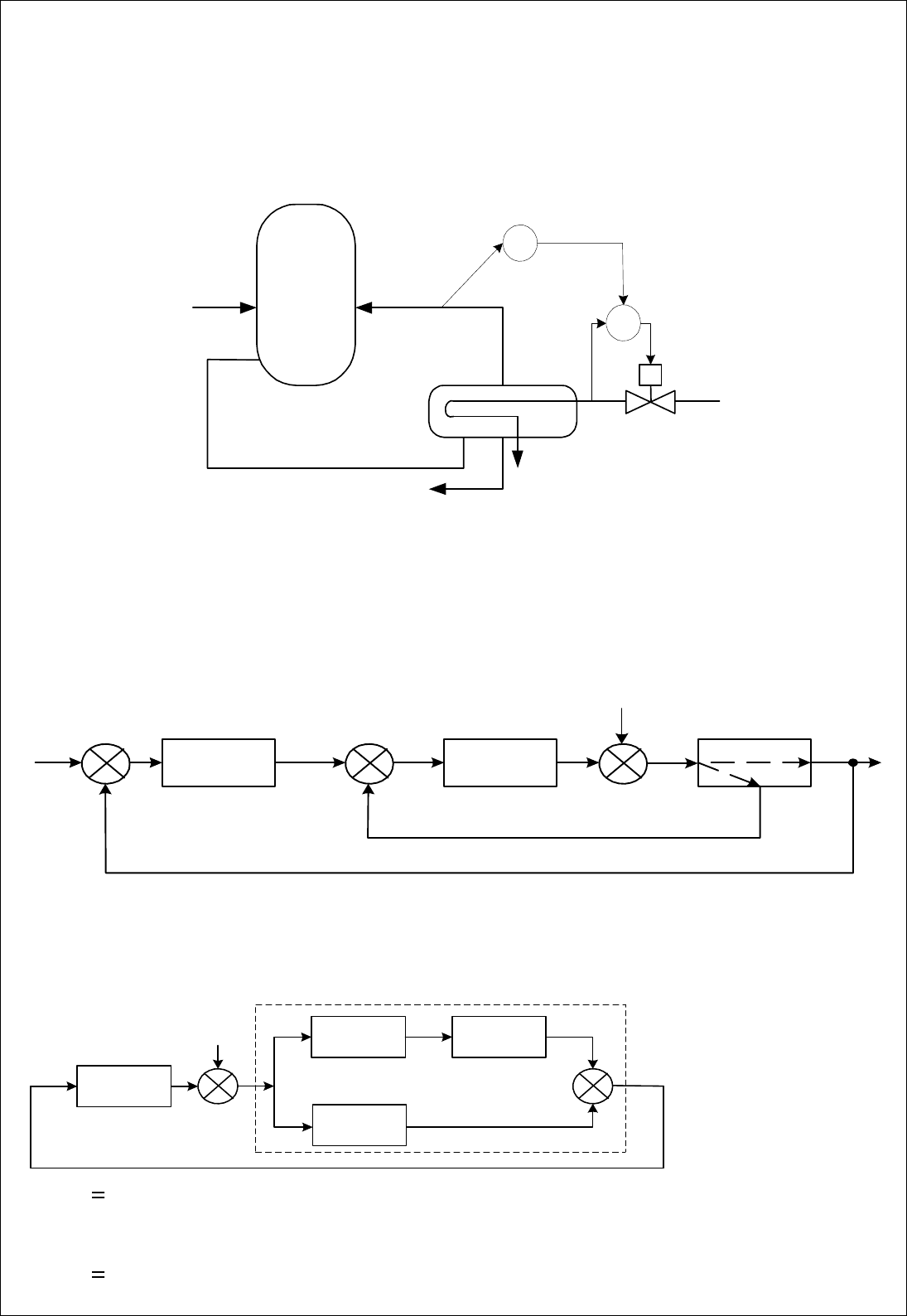
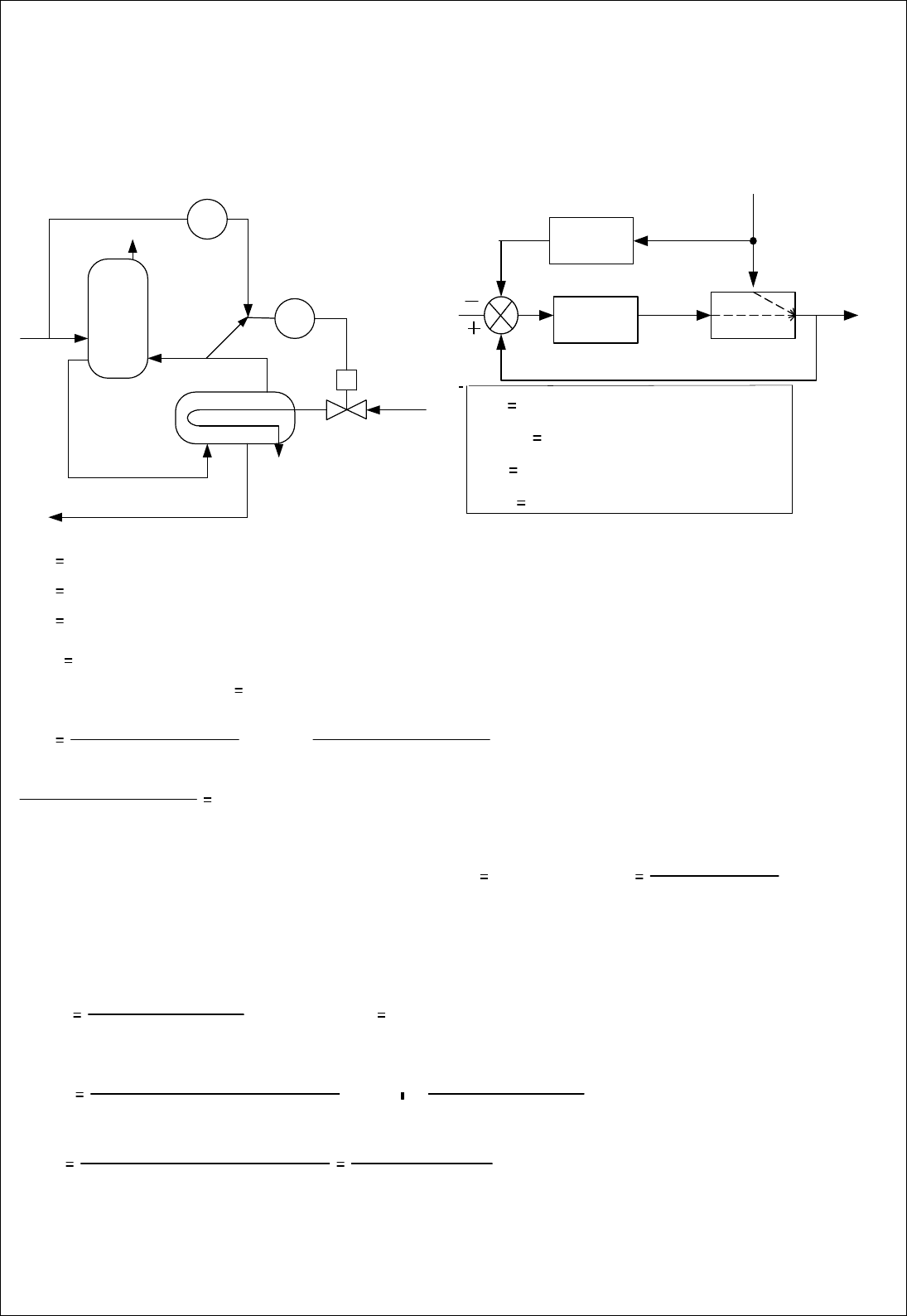
4. Понятие каскадной системы: расчет вспомогательного регулятора.
Если среди вспомогательных параметров координат объекта, можно выделить такую,
которая отзывается на возмущение быстрее, чем основной регулируемый параметр, то
путем введения дополнительного контура можно построить так называемую каскадную
систему регулирования.
Каскадными принято называть системы, в которых выходной сигнал одного из
регулятора направляются в качестве задания на другой регулятор.
FC
TC
P1
P2
НДЭГ
РДЭГ
водяной
пар
В качестве параметра, который отзывается на возмущение быстрее, чем регулируемый
параметр, здесь расход.
Принцип действия каскадной системы: основные возмущения системы компенсируются
быстродействующим регулятором Р1, а оставшиеся возмущения – Р2 путем изменения
задания регулятору Р1. (Р1 – вспомогательный или стабилизирующий регулятор, Р2 –
основной или корректирующий регулятор)
Wp
2
(p) Wp
1
(p)
y
з
x
x
1
x
в
W
μ
y
μ
zW
μ – регулирующее воздействие Wμy – передаточная функция по основному каналу
Wμz – передаточная функция по вспомогательному каналу.
Расчет двухконтурной системы сводится к расчету двух одноконтурных систем.
Необходимо выполнение условий wр1>>wp2
Wp
1
(p)
W
э1
(p)
W
μ
z
W
μ
y
Wp
2
(p)
x
1
x
в
Wэ1 p( ) Wy p( ) Wp2 p( ) Wz p( )
Ay wp1( ) Ap2 wp1( ) Az wp1( )
Wэ1 p( ) Wz p( )
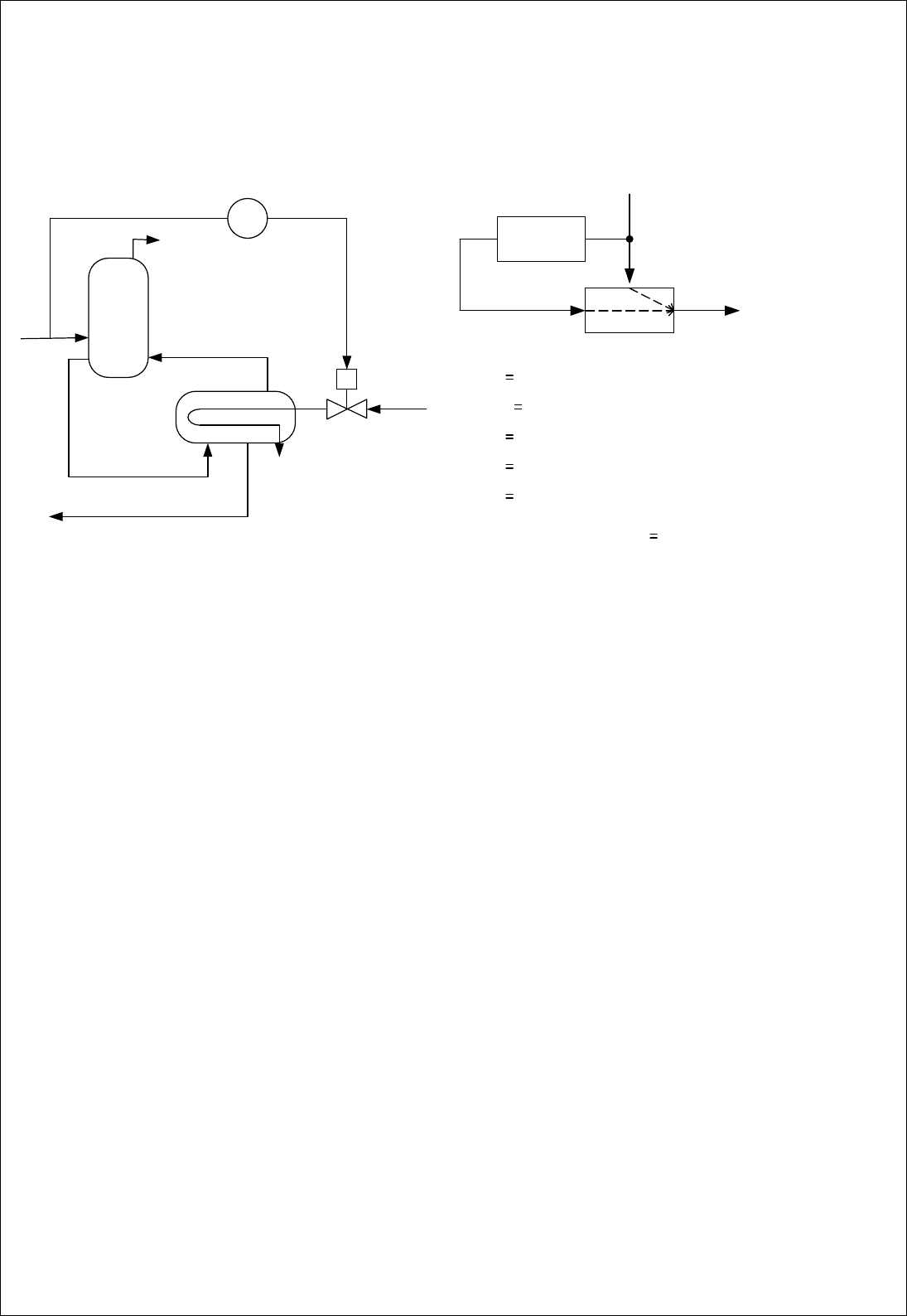
5. Разомкнутая инвариантная система.
Инвариантные системы- принцип инвариантности (независимости) заключается в
достижении независимости регулируемого параметра от внешнего возмущ. воздействия
путем ее полной компенсации.
FY- компенсатор. Система практически нереализуема, на нее действуют несколько
возмущений, а компенсируется только одно.
Wк(p)
xк
y
Wоб(p)
Wв(p)
xв
Y p( ) Wв X p( ) Wоб p( ) Xк p( ) 1( )
2( )
Xк p( ) Wк p( ) Xв p( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Wк p( ) Xв p( )
Y p( ) Wв p( ) Wоб p( ) Wк p( )( ) Xв p( ) 3( )
Y p( ) 0
Wв p( ) Wоб p( ) Wк p( ) 0 4( )
Хв(p) не равно 0
В промышленности отдельно взятые инвариантные системы не применяются. Обычно
исполняют комбинированные инвариантные системы, которые включают регулятор по
отклонению и возмущению.
D
FY
Y
РДЭГ
НДЭГ
F,C
xк
Вод.пар
Pn, Tn
xв
F,T
y
6. Комбинированная инвариантная система: 1 вариант.
Инвариантные системы- принцип инвариантности (независимости) заключается в
достижении независимости регулируемого параметра от внешнего возмущ. воздействия
путем ее полной компенсации. Комбинированные инвариантные системы включают
регулятор по отклонению и возмущению.
FY- компенсатор
Выход компенсатора подается на вход объекта.
Wк(p)
Wрег(p)
xрег
xк
x
-y
y
Wоб(p)
Wв(p)
xв
Y p( ) Wв Xв p( ) Wоб p( ) X p( ) 1( )
2( )
X p( ) Xрег p( ) Xк p( )
3( )
Xрег p( ) Wрег p( ) Y p( )
4( )
Xк p( ) Wк p( ) Xв p( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Xрег p( ) Xк p( )( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Xрег p( ) Wоб p( ) Xк p( )
Y p( ) W p( ) Xв p( ) Wоб p( ) Wрег p( ) Y p( ) Wоб p( ) Wк p( ) Xв p( )
1 Wоб p( ) Wрег p( )( ) Y p( ) Wв p( ) Wоб p( ) Wк p( )( ) Xв p( )
Y p( )
Wв p( ) Wоб p( ) Wк p( )( )
1 Wоб p( ) Wрег p( )( )
Xв p( ) 5( ) Wв p( ) Wоб p( ) Wк p( ) 0 6( )
Wк p( )
Wв p( )
Wоб p( )
7( )
(6) и (7)
для достижения инвариантности основного регулируемого параметра Y(p). Параметры
настройки регулятора рассчитываются независимо от компенсатора.
D
FY
TC
Y
xрег
РДЭГ
НДЭГ
xк
x
Вод.пар
xв
7. Комбинированная инвариантная система: 2 вариант.
Инвариантные системы- принцип инвариантности (независимости) заключается в
достижении независимости регулируемого параметра от внешнего возмущ. воздействия
путем ее полной компенсации. Комбинированные инвариантные системы включают
регулятор по отклонению и возмущению.
FY- компенсатор
Выход компенсатора подается на вход регулятора.
Wк(p)
Wрег(p)
x
y
y
Wоб(p)
Wв(p)
xв
xрег
xк
yз
Y p( ) Wв Xв p( ) Wоб p( ) Xрег p( ) 1( )
2( )
Xрег p( ) Wрег p( ) X p( )
3( )
X p( ) Yз p( ) Xк p( ) Y p( )
4( )
Xк p( ) Wк p( ) Xв p( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Wрег p( ) X p( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Wрег p( ) Yз p( ) Xк з( ) Y p( )( )
Y p( ) Wв p( ) Xв p( ) Wоб p( ) Wрег p( ) Yз p( ) Wоб p( ) Wрег p( ) Xк p( ) Wоб p( ) Wрег p( ) Y p( )
Xк p( ) Wк p( ) Xв p( )
1 Wоб p( ) Wрег p( )( ) Y p( ) Wоб p( ) Wрег p( ) Yз p( ) Wв p( ) Wоб p( ) Wрег p( ) Wк p( )( ) Xв p( )
Y p( )
Wоб p( ) Wрег p( )( )
1 Wоб p( ) Wрег p( )( )
Yз p( )
Wв p( ) Wоб p( ) Wк p( )
1 Wоб p( ) Wрег p( )
Xв p( ) 5( )
Wв p( ) Wоб p( ) Wк p( )
1 Wоб p( ) Wрег p( )
Wy Wф
для достижения инвариантности основного регулируемого параметра Y(p) необходимо
соблюдение условия:
7( )
Wв p( ) Wоб p( ) Wрег p( ) Wк p( ) 0 6( ) Wк p( )
Wв p( )
Wоб p( ) Wрег p( )
Исходя из (5) : параметры настройки регулятора рассчитываются независимо от
компенсатора. При выборе и реализации компенсатора на основании (7) необходимо
учитывать вид и параметры настройки регулятора.
Wy p( )
Wоб p( ) Wрег p( )
1 Wоб p( ) Wрег p( )
8( ) Y p( ) Wy p( ) Yз p( ) Wy p( ) Wф p( ) Xв p( ) 9( )
Wф p( )
Wв p( ) Wоб p( ) Wрег p( ) Wк p( )
1 Wоб p( ) Wрег p( )
Wоб p( ) Wрег p( )
1 Wоб p( ) Wрег p( )
Wф p( )
Wв p( ) Wоб p( ) Wрег p( ) Wк p( )
Wоб p( ) Wрег p( )
Wв p( )
Wоб p( ) Wрег p( )( )
Wк p( )
Такую систему
можно рассматривать как двуступенчатый фильтр из разомкнут. и замкн. Контуров через
которые пропуск. возмущения для достижения его полной компенсации.
D
FY
TC
Y
xрег
РДЭГ
НДЭГ
xк
y
Вод.пар
xв
yз