Парамонова Е.Г., Юнусов А.Г. Геодезические работы в мелиоративном строительстве
Подождите немного. Документ загружается.

дится с помощью вертикальных исправительных винтов сеткге
нитей, вращая которые устанавливают основной горизонталь-
ный штрих сетки нитей на предвычисленный отсчет Ь\.
Последняя поверка выполняется периодически в процессе ра*
боты с нивелиром, для чего после приведения нивелира в ра-
бочее положение берут отсчет по рейке, установленной на рас-
стоянии 100 м от нивелира. Резким поворотом подъемного вин-
та, расположенного в направлении рейки, нивелиру придают не-
большой "(в пределах угла компенсации) наклон. Изменение от-
счета в первый момент, а затем восстановление первоначально-
го отсчета свидетельствует о нормальной работе компенсатора.
Способы нивелирования
В зависимости от положения нивелира относительно -точек,,
превышение между которыми определяется, различают два спо-
соба геометрического нивелирования: нивелирование «вперед» и
нивелирование «из середины».
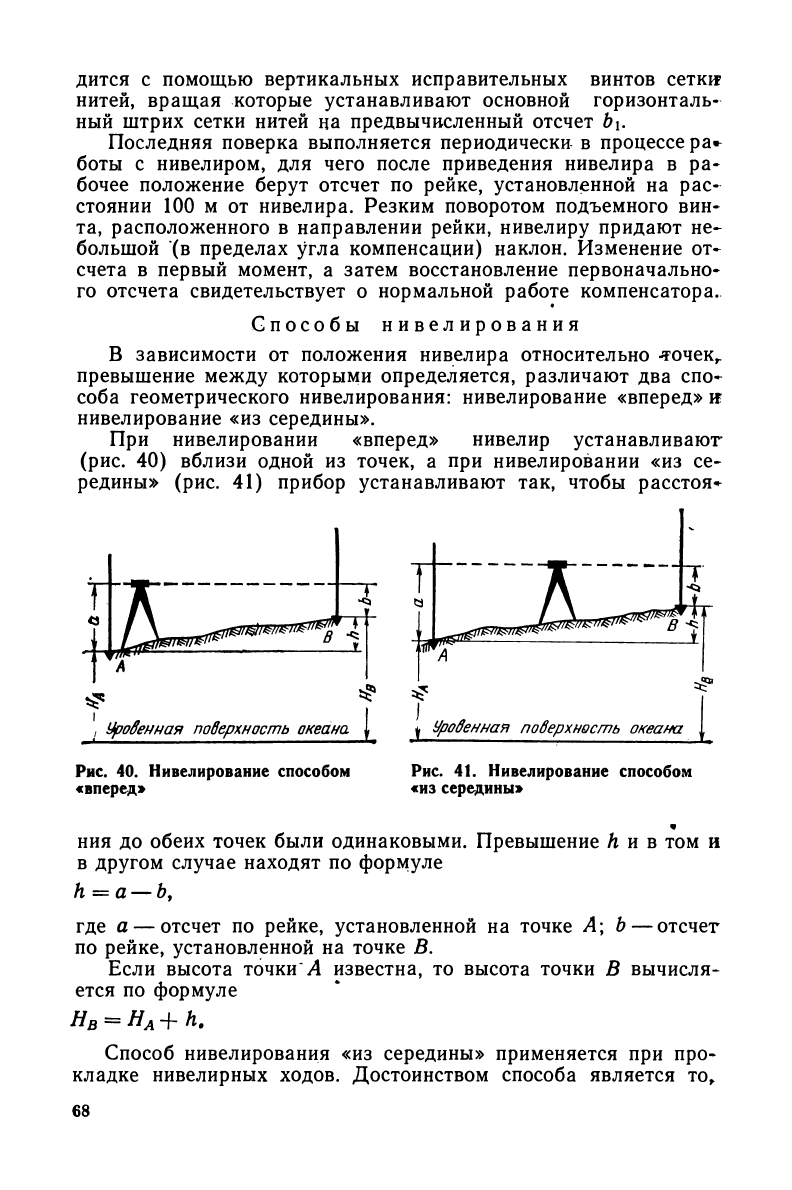
При нивелировании «вперед» нивелир устанавливают
(рис. 40) вблизи одной из точек, а при нивелировании «из се-
редины» (рис. 41) прибор устанавливают так, чтобы расстоя*
«вперед» «из середины»
щ
ния до обеих точек были одинаковыми. Превышение h ив том и
в другом случае находят по формуле
h = а — Ь,
где а — отсчет по рейке, установленной на точке А\ Ь — отсчет
по рейке, установленной на точке В.
Если высота точки" Л известна, то высота точки В вычисля-
ется по формуле
H
B
= H
A
+h.
Способ нивелирования «из середины» применяется при про-
кладке нивелирных ходов. Достоинством способа является то,
68
что в нем компенсируются погрешности, связанные с невыпол-
нением основного условия нивелира.
Способ нивелирования «вперед» применяется в том случае,
когда с одной установки нивелира необходимо определить или
вынести на местность отметки большого числа точек (например,
при нивелировании вершин квадратов участка, подлежащего
планировке). Вычисление отметок точек при этом удобно вы-
полнять от горизонта прибора — отметки горизонтальной линии
визирования
Г
Т1
= Н
А
+а.
Отметки определяемых точек находят по формулам
Н
В
= ГП — Ь,
Н
с
= ГП — с,
H
N
=ГП — п,
где Ь
у
с, ..., п — отсчеты по рейкам, установленным в точках
В, С, N.
Вынесение на местность точки
с заданной отметкой
При вынесении точки с заданной проектной отметкой Н
и
положение точки в плане должно быть известно, а вблизи точки
должен находиться постоянный или временный репер. Нивелир
устанавливают примерно посередине между репером, отметка
которого #
рп
известна, и точкой, отметку которой надо по-
строить. Устанавливают рейку на репер, берут отсчет а по
рейке и вычисляет горизонт прибора
ГП = #
рп
+ а.
Вычисляют отсчет по рейке, который получился бы, если
она была бы установлена на проектной отметке
Ь = ГП—Н
П
.
В месте вынесения точки устанавливают рейку и перемещают
ее вверх или вниз до тех пор, пока отсчет по рейке не будет
равен Ь. В этот момент пятка рейки будет находиться на проект-
ной отметке. Закрепляют точку кольями, а при необходимости
и постоянными знаками. Контроль правильности построения
осуществляют повторным нивелированием.
Построение линии с проектным ук л.о ном
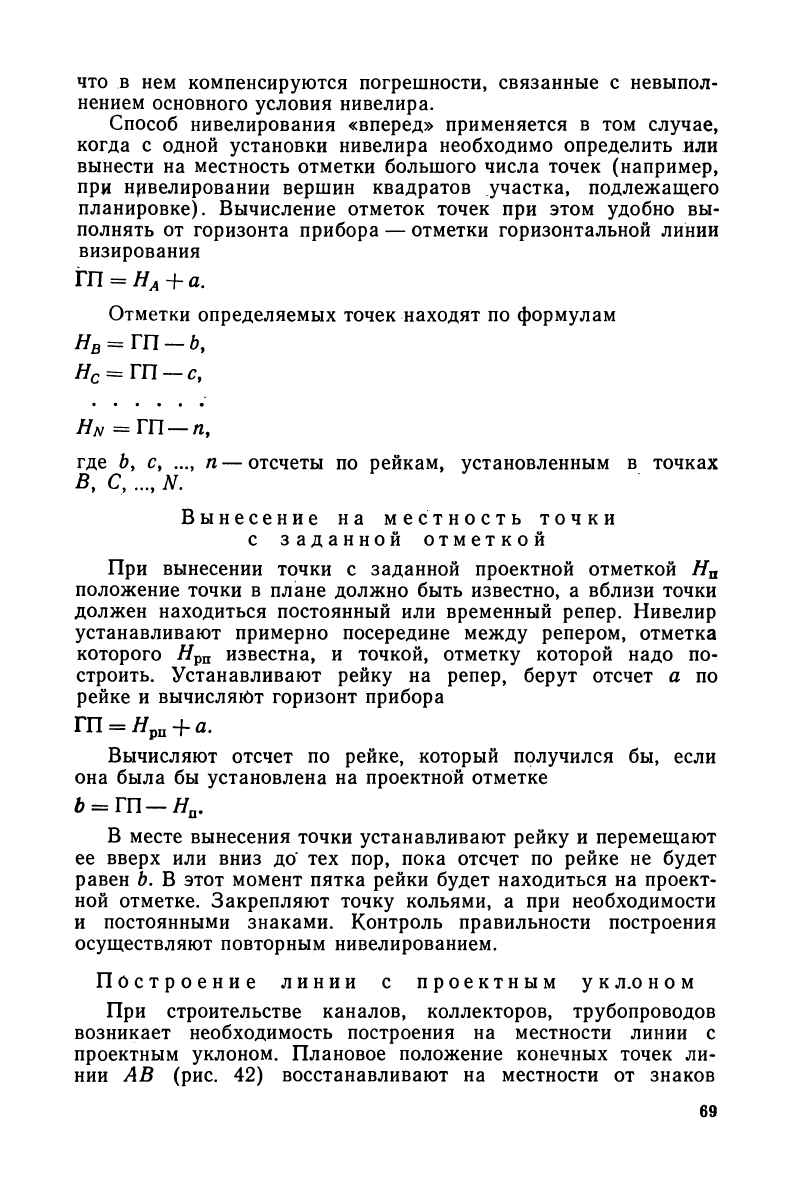
При строительстве каналов, коллекторов, трубопроводов
возникает необходимость построения на местности линии с
проектным уклоном. Плановое положение конечных точек ли-
нии АВ (рис. 42) восстанавливают на местности от знаков
69
планового закрепления. Проектные отметки в этих двух точках
выносят от знаков высотного закрепления (реперов).
Рис. 42. Построение линии с проектным уклоном
Нивелир устанавливают в точке А так, чтобы один из
подъемных винтов был направлен по линии АВ. Измеряют вы-
соту нивелира а над точкой А. В точке В устанавливают рейку,
и с помощью элевационного или подъемного винта наклоняют
трубу так, чтобы отсчет по рейке в точке В был равен а. Тем
самым линия визирования устанавливается параллельно проект-
ной линии на расстоянии а. Перемещают рейку по линии и
забивают колья так, чтобы отсчет по рейке везде был равен а.
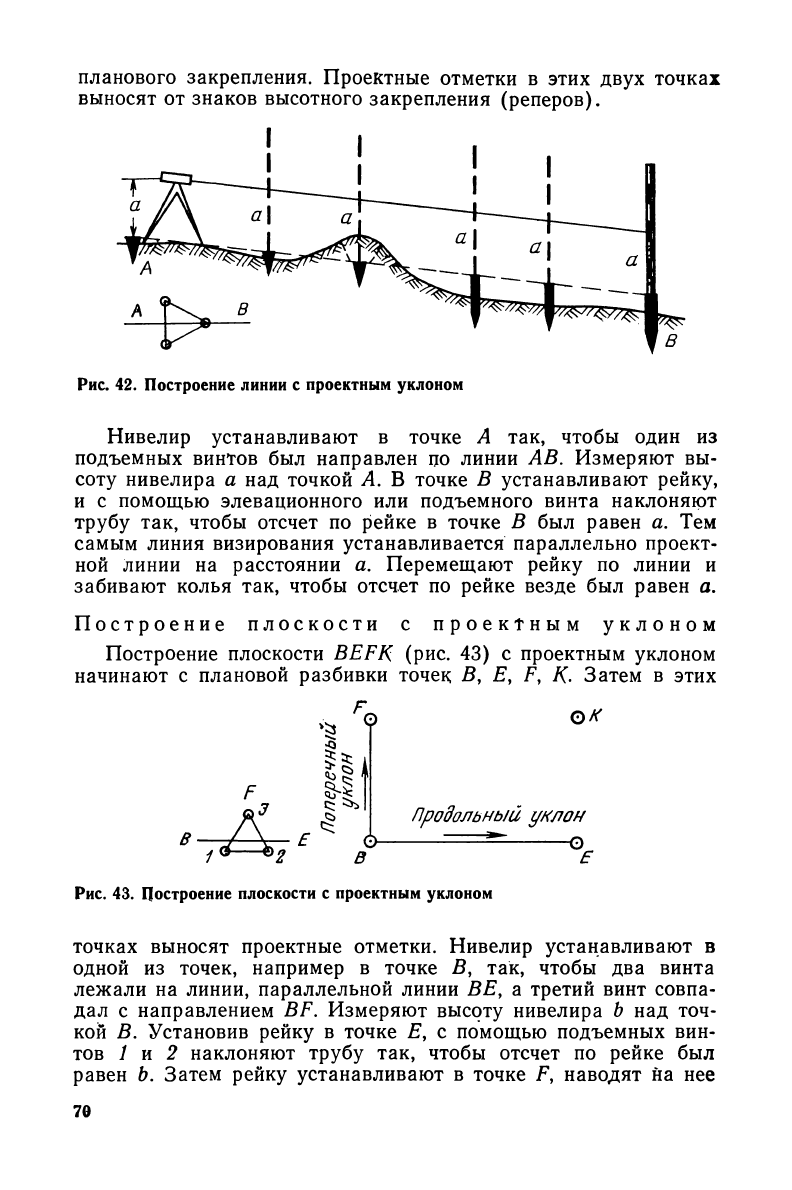
Построение плоскости с проектным уклоном
Построение плоскости BEFK (рис. 43) с проектным уклоном
начинают с плановой разбивки точек; В, Е, F, К. Затем в этих
Рис. 43. Построение плоскости с проектным уклоном
точках выносят проектные отметки. Нивелир устанавливают в
одной из точек, например в точке 5, так, чтобы два винта
лежали на линии, параллельной линии ВЕ
У
а третий винт совпа-
дал с направлением BF. Измеряют высоту нивелира Ъ над точ-
кой В. Установив рейку в точке Е, с помощью подъемных вин-
тов 1 и 2 наклоняют трубу так, чтобы отсчет по рейке был
равен Ь. Затем рейку устанавливают в точке F, наводят на нее
Продольный
уклон
О
ол-
Е
70
трубу и, действуя подъемным винтом <?, добиваются, чтобы
отсчет по рейке был равен Ь.
Для контроля рейку устанавливают в точке /С, отсчет по рей-
ке также должен быть равен Ь. После этого приступают к
вынесению и закреплению на местности необходимых точек
планируемого участка. В этих точках последовательно устанав-
ливают рейку, которую перемещают вверх или вниз до полу-
чения отсчета Ь.
Передача отметки на дно котлована
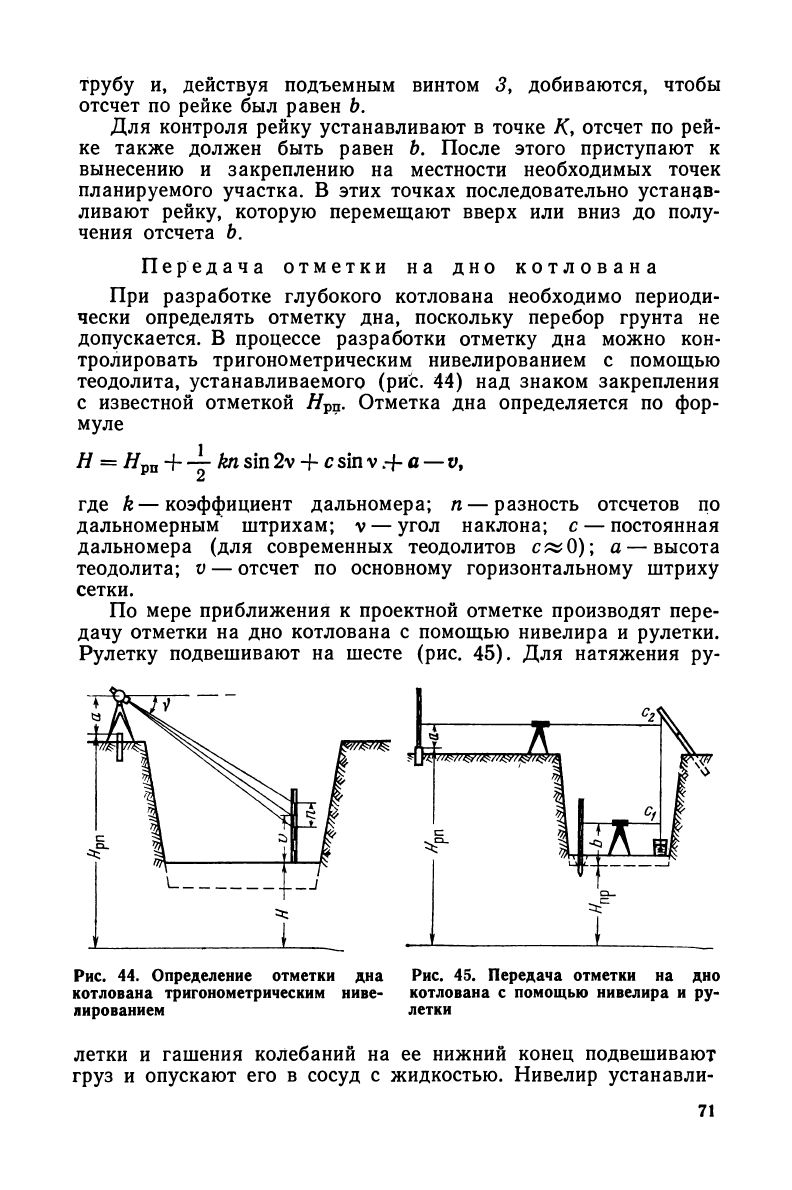
При разработке глубокого котлована необходимо периоди-
чески определять отметку дна, поскольку перебор грунта не
допускается. В процессе разработки отметку дна можно кон-
тролировать тригонометрическим нивелированием с помощью
теодолита, устанавливаемого (рис. 44) над знаком закрепления
с известной отметкой Я
Р9
. Отметка дна определяется по фор-
муле
Н = Я
рп
+ -j
kn s
*
n
2v + с sin vа — v,
где k—коэффициент дальномера; п — разность отсчетов по
дальномерным штрихам; v — угол наклона; с — постоянная
дальномера (для современных теодолитов с«0); а — высота
теодолита; v — отсчет по основному горизонтальному штриху
сетки.
По мере приближения к проектной отметке производят пере-
дачу отметки на дно котлована с помощью нивелира и рулетки.
Рулетку подвешивают на шесте (рис. 45). Для натяжения ру-
Рис. 44. Определение отметки дна Рис. 45. Передача отметки на дно
котлована тригонометрическим ниве- котлована с помощью нивелира и ру-
лированием летки
летки и гашения колебаний на ее нижний конец подвешивают
груз и опускают его в сосуд с жидкостью. Нивелир устанавли-
71
вают вблизи бровки котлована так, чтобы расстояния от него
до репера и рулетки были примерно равны.
С помощью нивелира берут отсчет а по рейке, установленной
на репере, отметка которого Я
рп
известна, а также отсчет с
2
по
рулетке. Затем нивелир устанавливают на дно котлована и
производят отсчет по рулетке с\. Вычисляют отсчет по рейке,
который должен получиться, когда ее пятка будет находиться на
проектной отметке
b = #
рп
+ а — (с
2
— q)— #
пр
,
где #пр — проектная отметка дна котлована.
Перемещением рейки добиваются такого положения, при
котором отсчет по ней был равен Ь
у
точку закрепляют колом
или временным репером.
Отметку верха плотины или дамбы в процессе ее отсыпки
также можно контролировать тригонометрическим нивелирова-
нием, а перед достижением проектной отметки — геометрическим
нивелированием.
§ 12. Контроль производства земляных работ
Геодезические работы в период производства земляных ра-
бот проводят с целью обеспечения своевременного контроля за
соответствием параметров сооружаемого объекта его проектным
параметрам. Методы геодезического контроля зависят от при-
меняемой технологии работы землеройных механизмов и их
состава. В процессе работы механизмов контролируют глубину
выемки, высоту насыпи, соответствие уклона проектному зна-
чению. Оперативный геодезический контроль осуществляется от
знаков закрепления детальных разбивочных работ. Во время
производства земляных работ следят за сохранностью знаков
закрепления и в случае их повреждения немедленно восстанав-
ливают. Отклонения фактических параметров возводимых со-
оружений от проектных не должны превышать величин, указан-
ных в табл. 1 и 2.
Контроль параметров сооружаемого объекта ведут, исполь-
зуя ведомость закрепления знаков детальной разбивки. Прове-
ряют расположение сооружения в плане и профиле, геометри-
ческие параметры сооружения, отметки бровок и дна, продоль-
ный уклон и заложение откосов. Особенностью работ является
необходимость обеспечения геодезической информацией маши-
нистов землеройных машин.
При разработке глубоких выемок и отсыпке высоких насыпей
на первом этапе достаточными являются знаки детальной раз-
бивки, дополняемые кольями, устанавливаемыми по оси соору-
жения с указанием рабочей отметки. По мере приближения к
проектным отметкам, а также при небольших рабочих отметках
контроль работы землеройных машин ведется по визиркам
72
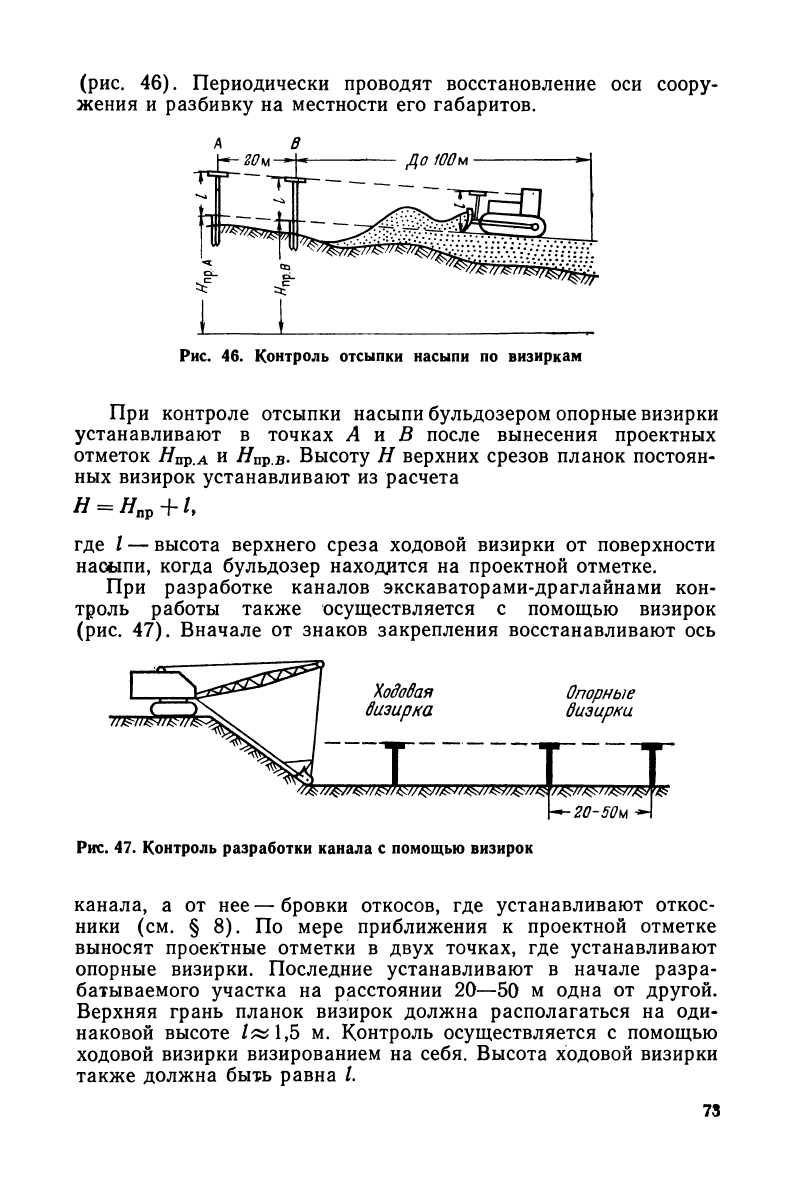
(рис. 46). Периодически проводят восстановление оси соору-
жения и разбивку на местности его габаритов.
А В
Рис. 46. Контроль отсыпки насыпи по визиркам
При контроле отсыпки насыпи бульдозером опорные визирки
устанавливают в точках А и В после вынесения проектных
отметок Япр.л и #
П
р.в. Высоту Н верхних срезов планок постоян-
ных визирок устанавливают из расчета
Н = #
лр
+
U
где I — высота верхнего среза ходовой визирки от поверхности
насыпи, когда бульдозер находится на проектной отметке.
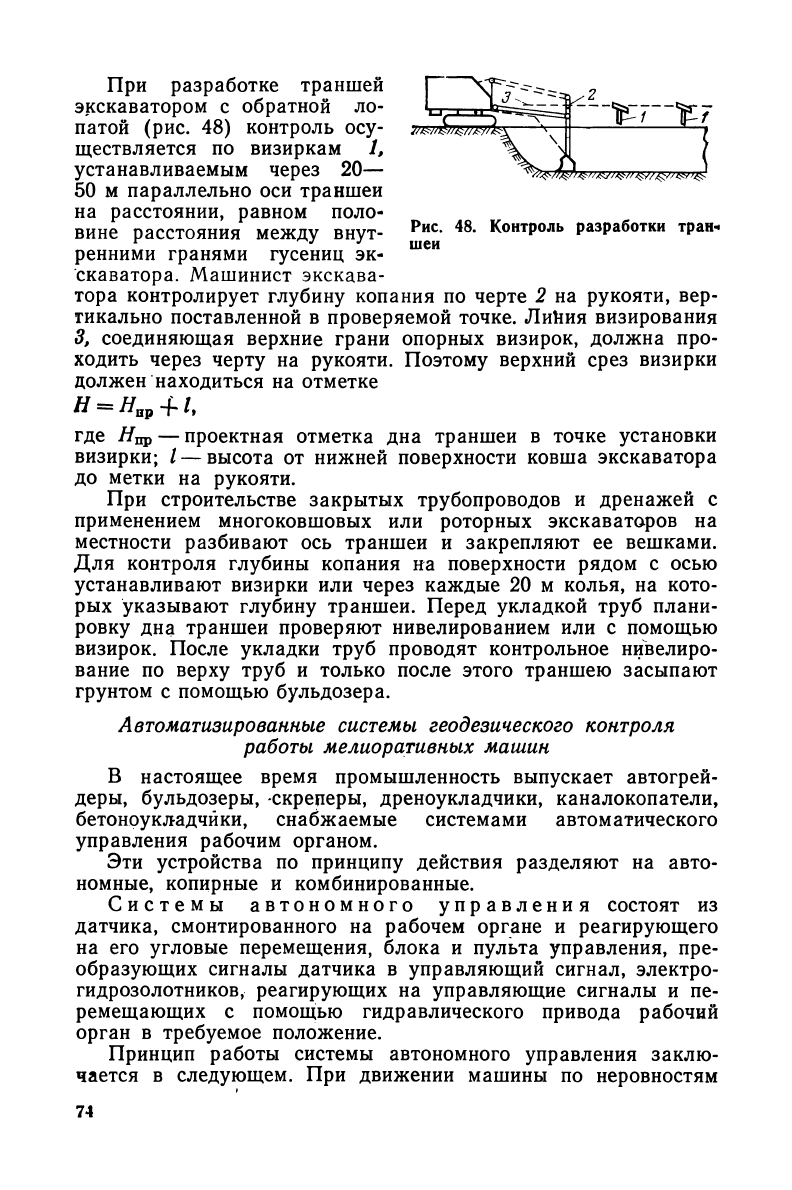
При разработке каналов экскаваторами-драглайнами кон-
троль работы также осуществляется с помощью визирок
(рис. 47). Вначале от знаков закрепления восстанавливают ось
Рис. 47. Контроль разработки канала с помощью визирок
канала, а от нее—бровки откосов, где устанавливают откос-
ники (см. § 8). По мере приближения к проектной отметке
выносят проектные отметки в двух точках, где устанавливают
опорные визирки. Последние устанавливают в начале разра-
батываемого участка на расстоянии 20—50 м одна от другой.
Верхняя грань планок визирок должна располагаться на оди-
наковой высоте /«1,5 м. Контроль осуществляется с помощью
ходовой визирки визированием на себя. Высота ходовой визирки
также должна быть равна /.
73
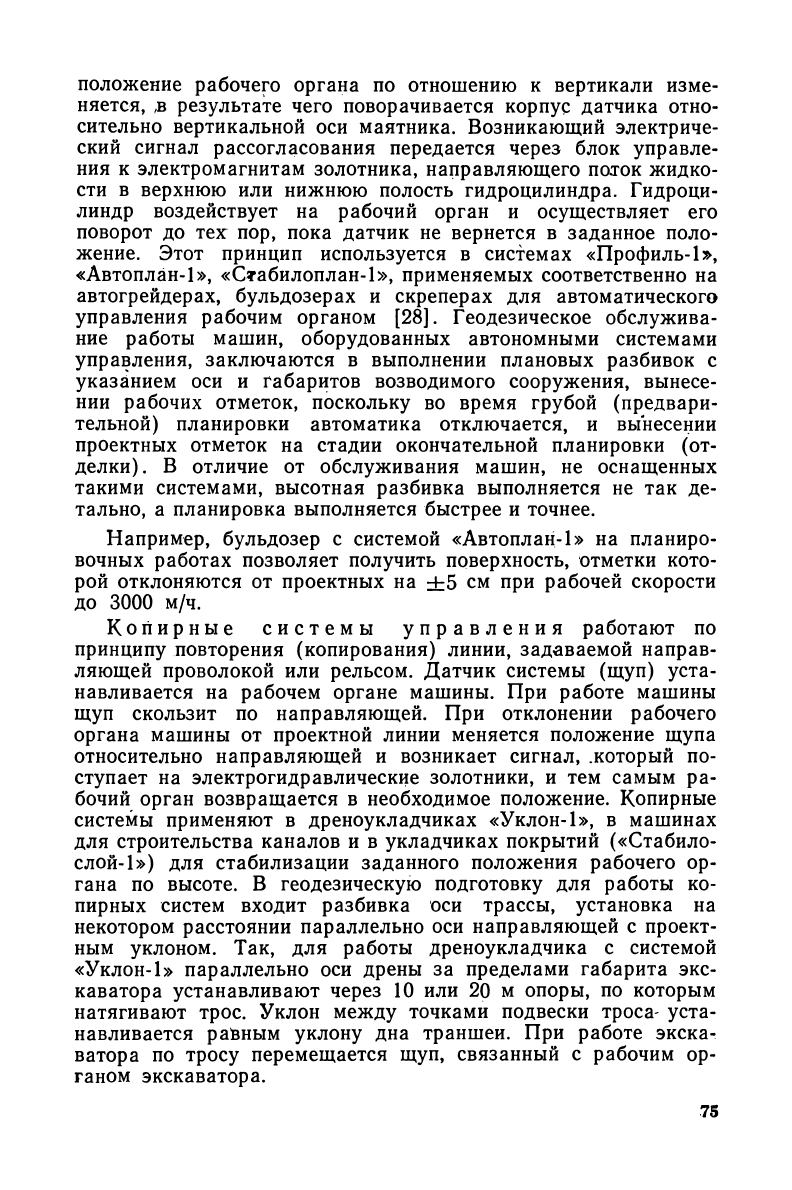
При разработке траншей
экскаватором с обратной ло-
патой (рис. 48) контроль осу-
ществляется по визиркам 1,
устанавливаемым через 20—
50 м параллельно оси траншеи
на расстоянии, равном поло-
вине расстояния между внут-
ренними гранями гусениц эк-
скаватора. Машинист экскава-
тора контролирует глубину копания по черте 2 на рукояти, вер-
тикально поставленной в проверяемой точке. ЛиЬия визирования
3, соединяющая верхние грани опорных визирок, должна про-
ходить через черту на рукояти. Поэтому верхний срез визирки
должен находиться на отметке
Н = -f и
где Ядр — проектная отметка дна траншеи в точке установки
визирки; I — высота от нижней поверхности ковша экскаватора
до метки на рукояти.
При строительстве закрытых трубопроводов и дренажей с
применением многоковшовых или роторных экскаваторов на
местности разбивают ось траншеи и закрепляют ее вешками.
Для контроля глубины копания на поверхности рядом с осью
устанавливают визирки или через каждые 20 м колья, на кото-
рых указывают глубину траншеи. Перед укладкой труб плани-
ровку дна траншеи проверяют нивелированием или с помощью
визирок. После укладки труб проводят контрольное нивелиро-
вание по верху труб и только после этого траншею засыпают
грунтом с помощью бульдозера.
Автоматизированные системы геодезического контроля
работы мелиоративных машин
В настоящее время промышленность выпускает автогрей-
деры, бульдозеры, -скреперы, дреноукладчики, каналокопатели,
бетоноукладчики, снабжаемые системами автоматического
управления рабочим органом.
Эти устройства по принципу действия разделяют на авто-
номные, копирные и комбинированные.
Системы автономного управления состоят из
датчика, смонтированного на рабочем органе и реагирующего
на его угловые перемещения, блока и пульта управления, пре-
образующих сигналы датчика в управляющий сигнал, электро-
гидрозолотников, реагирующих на управляющие сигналы и пе-
ремещающих с помощью гидравлического привода рабочий
орган в требуемое положение.
Принцип работы системы автономного управления заклю-
чается в следующем. При движении машины по неровностям
Рис. 48. Контроль разработки тран«
шеи
74
положение рабочего органа по отношению к вертикали изме-
няется, з результате чего поворачивается корпус датчика отно-
сительно вертикальной оси маятника. Возникающий электриче-
ский сигнал рассогласования передается через блок управле-
ния к электромагнитам золотника, направляющего поток жидко-
сти в верхнюю или нижнюю полость гидроцилиндра. Гидроци-
линдр воздействует на рабочий орган и осуществляет его
поворот до тех пор, пока датчик не вернется в заданное поло-
жение. Этот принцип используется в системах «Профиль-1»,
«Автоплан-1», «С?абилоплан-1», применяемых соответственно на
автогрейдерах, бульдозерах и скреперах для автоматического
управления рабочим органом [28]. Геодезическое обслужива-
ние работы машин, оборудованных автономными системами
управления, заключаются в выполнении плановых разбивок с
указанием оси и габаритов возводимого сооружения, вынесе-
нии рабочих отметок, поскольку во время грубой (предвари-
тельной) планировки автоматика отключается, и вынесении
проектных отметок на стадии окончательной планировки (от-
делки). В отличие от обслуживания машин, не оснащенных
такими системами, высотная разбивка выполняется не так де-
тально, а планировка выполняется быстрее и точнее.
Например, бульдозер с системой «Автоплан-1» на планиро-
вочных работах позволяет получить поверхность, отметки кото-
рой отклоняются от проектных на ±5 см при рабочей скорости
до 3000 м/ч.
Копирные системы управления работают по
принципу повторения (копирования) линии, задаваемой направ-
ляющей проволокой или рельсом. Датчик системы (щуп) уста-
навливается на рабочем органе машины. При работе машины
щуп скользит по направляющей. При отклонении рабочего
органа машины от проектной линии меняется положение щупа
относительно направляющей и возникает сигнал, .который по-
ступает на электрогидравлические золотники, и тем самым ра-
бочий орган возвращается в необходимое положение. Копирные
системы применяют в дреноукладчиках «Уклон-1», в машинах
для строительства каналов и в укладчиках покрытий («Стабило-
слой-1») для стабилизации заданного положения рабочего ор-
гана по высоте. В геодезическую подготовку для работы ко-
пирных систем входит разбивка оси трассы, установка на
некотором расстоянии параллельно оси направляющей с проект-
ным уклоном. Так, для работы дреноукладчика с системой
«Уклон-1» параллельно оси дрены за пределами габарита экс-
каватора устанавливают через 10 или 20 м опоры, по которым
натягивают трос. Уклон между точками подвески троса- уста-
навливается равным уклону дна траншеи. При работе экска-
ватора по тросу перемещается щуп, связанный с рабочим ор-
ганом экскаватора.
75
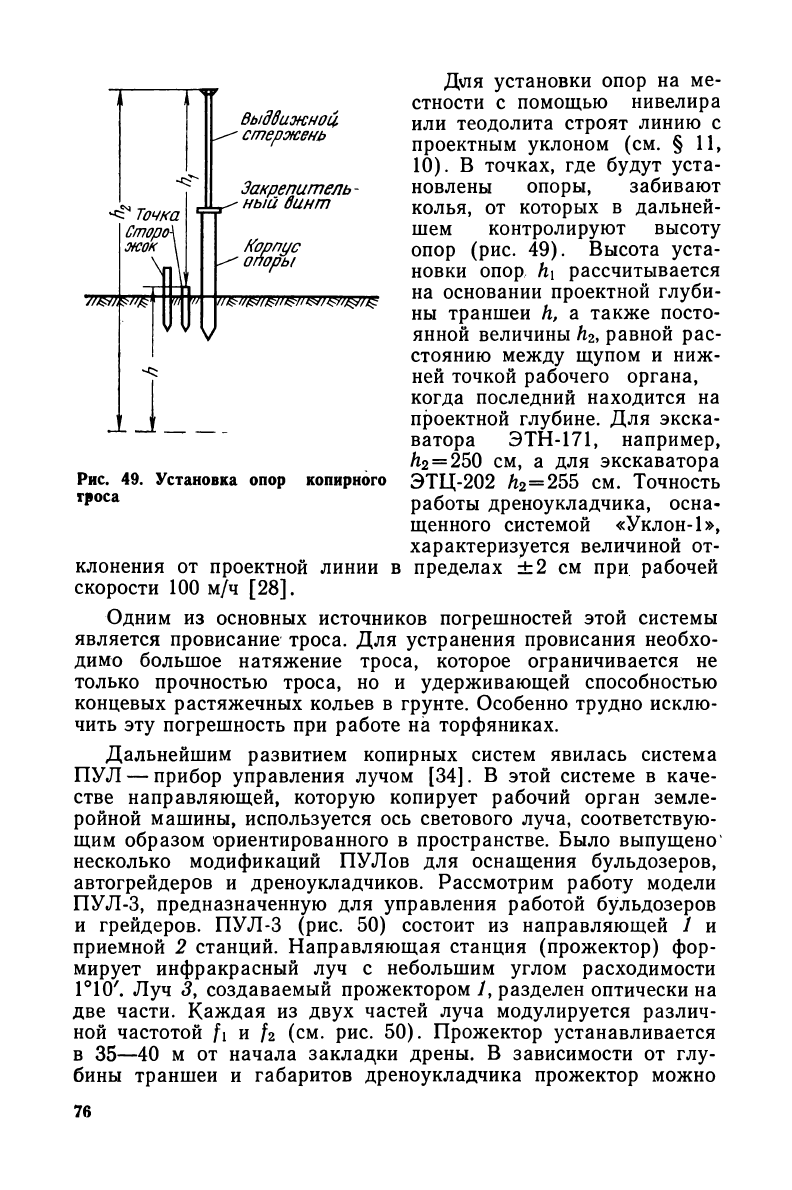
Д\ля установки опор на ме-
стности с помощью нивелира
или теодолита строят линию с
проектным уклоном (см. § И,
10). В точках, где будут уста-
новлены опоры, забивают
колья, от которых в дальней-
шем контролируют высоту
опор (рис. 49). Высота уста-
новки опор h\ рассчитывается
на основании проектной глуби-
ны траншеи h, а также посто-
янной величины /i
2
, равной рас-
стоянию между щупом и ниж-
ней точкой рабочего органа,
когда последний находится на
проектной глубине. Для экска-
ватора ЭТН-171, например,
/12
= 250 см, а для экскаватора
ЭТЦ-202 Л
2
=255 СМ. ТОЧНОСТЬ
работы дреноукладчика, осна-
щенного системой «Уклон-1»,
характеризуется величиной от-
клонения от проектной линии в пределах ±2 см при рабочей
скорости 100 м/ч [28].
Одним из основных источников погрешностей этой системы
является провисание троса. Для устранения провисания необхо-
димо большое натяжение троса, которое ограничивается не
только прочностью троса, но и удерживающей способностью
концевых растяжечных кольев в грунте. Особенно трудно исклю-
чить эту погрешность при работе на торфяниках.
Дальнейшим развитием копирных систем явилась система
ПУЛ — прибор управления лучом [34]. В этой системе в каче-
стве направляющей, которую копирует рабочий орган земле-
ройной машины, используется ось светового луча, соответствую-
щим образом ориентированного в пространстве. Было выпущено'
несколько модификаций ПУЛов для оснащения бульдозеров,
автогрейдеров и дреноукладчиков. Рассмотрим работу модели
ПУЛ-3, предназначенную для управления работой бульдозеров
и грейдеров. ПУЛ-3 (рис. 50) состоит из направляющей 1 и
приемной 2 станций. Направляющая станция (прожектор) фор-
мирует инфракрасный луч с небольшим углом расходимости
1°10'. Луч 3, создаваемый прожектором 1, разделен оптически на
две части. Каждая из двух частей луча модулируется различ-
ной частотой f 1 и /2 (см. рис. 50). Прожектор устанавливается
в 35—40 м от начала закладки дрены. В зависимости от глу-
бины траншеи и габаритов дреноукладчика прожектор можно
Рис. 49. Установка опор копирного
троса
76
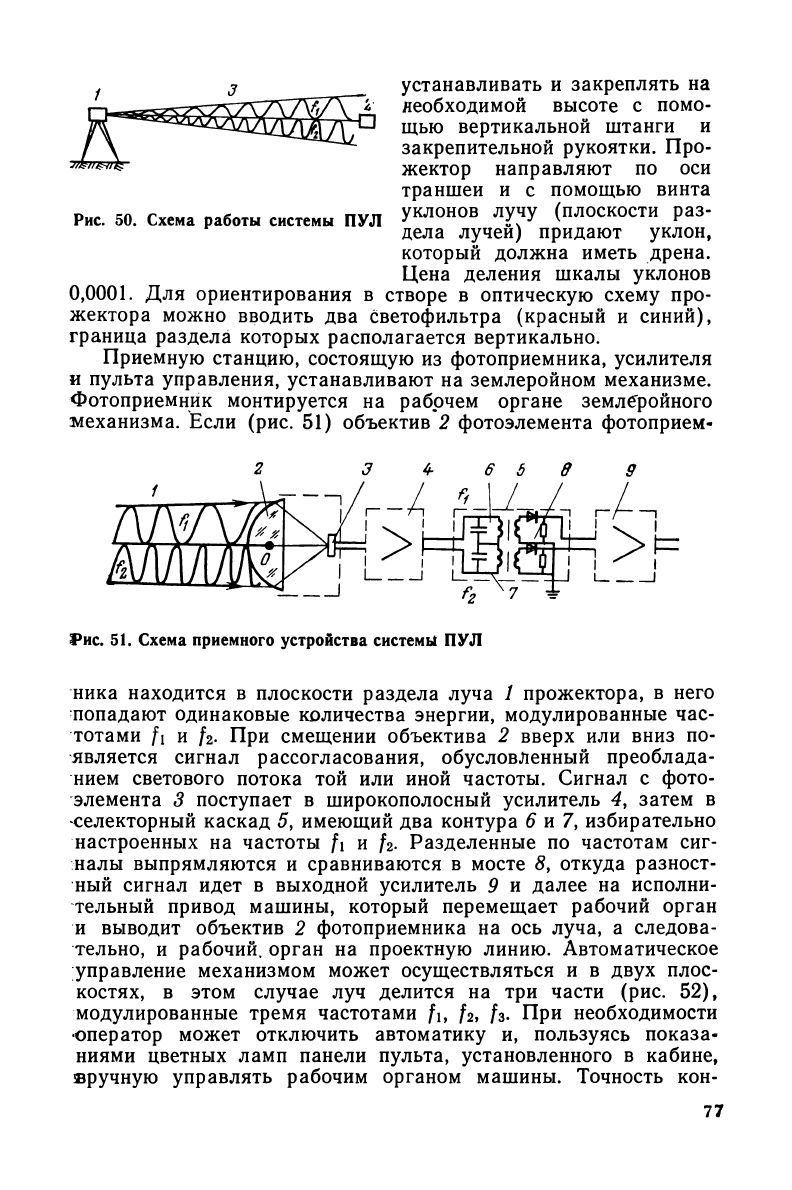
Рис. 50. Схема работы системы ПУЛ
устанавливать и закреплять на
необходимой высоте с помо-
щью вертикальной штанги и
закрепительной рукоятки. Про-
жектор направляют по оси
траншеи и с помощью винта
уклонов лучу (плоскости раз-
дела лучей) придают уклон,
который должна иметь дрена.
Цена деления шкалы уклонов
0,0001. Для ориентирования в створе в оптическую схему про-
жектора можно вводить два светофильтра (красный и синий),
граница раздела которых располагается вертикально.
Приемную станцию, состоящую из фотоприемника, усилителя
и пульта управления, устанавливают на землеройном механизме.
Фотоприемник монтируется на рабочем органе землеройного
механизма. Если (рис. 51) объектив 2 фотоэлемента фотоприем-
Рис. 51. Схема приемного устройства системы ПУЛ
ника находится в плоскости раздела луча 1 прожектора, в него
попадают одинаковые количества энергии, модулированные час-
тотами h и /
2
. При смещении объектива 2 вверх или вниз по-
является сигнал рассогласования, обусловленный преоблада-
нием светового потока той или иной частоты. Сигнал с фото-
элемента 3 поступает в широкополосный усилитель 4> затем в
селекторный каскад 5, имеющий два контура 6 и 7, избирательно
настроенных на частоты f\ и f
2
. Разделенные по частотам сиг-
налы выпрямляются и сравниваются в мосте 5, откуда разност-
ный сигнал идет в выходной усилитель 9 и далее на исполни-
тельный привод машины, который перемещает рабочий орган
и выводит объектив 2 фотоприемника на ось луча, а следова-
тельно, и рабочий, орган на проектную линию. Автоматическое
управление механизмом может осуществляться и в двух плос-
костях, в этом случае луч делится на три части (рис. 52),
модулированные тремя частотами f\, f
2
> /з. При необходимости
•оператор может отключить автоматику и, пользуясь показа-
ниями цветных ламп панели пульта, установленного в кабине,
вручную управлять рабочим органом машины. Точность кон-
77