Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

Под регулируемым электроприводом понимается электро-
ход, обеспечивающий плавное с необходимой точностью ре-
трование скорости (или момента) в заданном диапазоне. Од-
0 этим требования к регулируемому электроприводу не огра-
иваются. Система управления регулируемого электропривода
ясна обеспечивать также заданный характер переходных про-
сов при изменении скорости, момента или других параметров
Ьктропривола
[. Поскольку по своим электромеханическим свойствам элек-
двнгатели в естественной схеме включения в питающую сеть
5
могут обеспечить регулирование параметров движения элек-
' привода с нужным качеством, для создания регулируемого
тропривода приходится преобразовывать электрическую
гию, подводимую к (или отводимую от) двигателю Преоб-
вапие электрической энергии осуществляется посредством
проводниковых преобразователей.
Регулируя параметры преобразованной электрической энер-
Н (частоту, напряжение, форму и длительность импульсов и
) удается получить требуемые для регулируемого привода ме-
ргеские и динамические характеристики. Для управления па-
страми (напряжение, частота и др.) полупроводниковых пре-
зователей. входящих в состав регулируемого элекгроприво-
служат внутренние контуры автомат ического регулирования -
регуляторы тока, эдс. тока возбуждения и др. В этом смысле
|улируемый электропривод всегда является автоматизироваи-
м, т.к. содержит средства автоматического управления, фор-
юшие характеристики электропривода.
Внешние контуры регулирования определяют параметры
1жения электропривода: скорость или положение рабочего ор-
А Обычно эти конгуры регулирования являются замкнутыми.
1
содержат отрицательную обратную связь по регулируемому
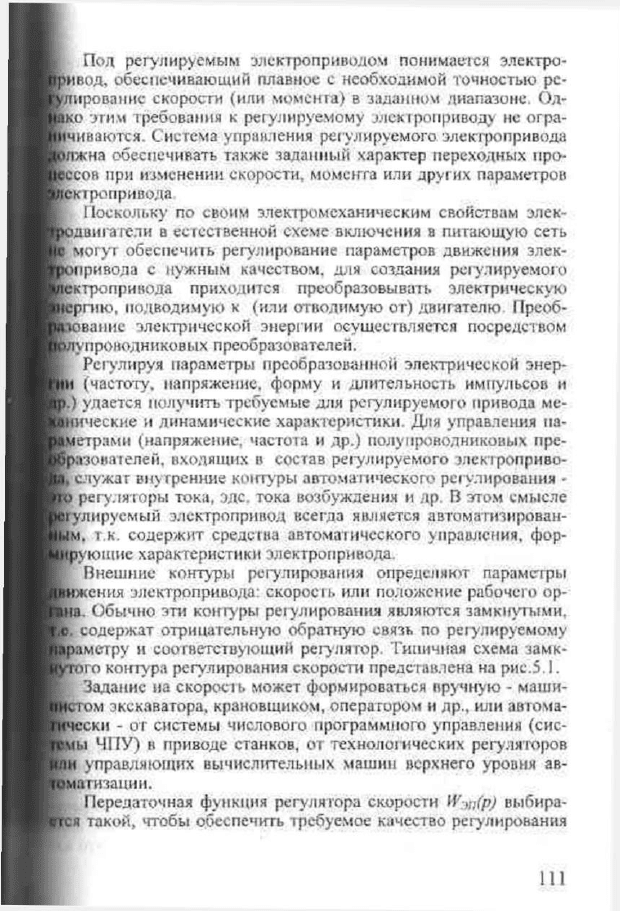
раметру и соответствующий регулятор. Типичная схема замк-
го контура регулирования скорости представлена на рис.5.1.
Задание иа скорость может формироваться пручную - маши-
м экскаватора, крановщиком, оператором и др., или автома-
скн - от системы числового программного управления (сис-
ы ЧПУ) в приводе станков, от технологических регуляторов
" управляющих вычислительных машин верхнего уровня ав-
Цтизацин.
Передаточная функция регулятора скорости
УУ:т(р)
выбира-
такой, чтобы обеспечить требуемое качество регулирования
по статическим (диапазон, точность) и по динамическим показа
телям (быстродействие, перерегулирование, колебательность).
ДвпгаТели, полу
проводниковые пре-
образователи элек-
трической энергии,
датчики и устройст-
ва автоматического
регулирования пара-
метров электропри-
вода в своей сово-
купности образуют
систему регулируе-
мого электропривода
Эти системы разли-
чаются. прежде все-
го, гю виду приводного электродвигателя, а также по виду ис-
пользуемых полупроводниковых преобразователей электриче-
ской энергии, питающих двигатель.
Регулирование скорости - это принудительное средствами
управления изменение скорости, исходя из Требований техноло-
гического процесса. Такое регулирование производится при по-
даче па вход системы регулирования управляющего воздействия.
Однако регулирование скорости может производиться и при не-
изменном управляющем воздействии, когда задача регулирова-
ния заключается в стабилизации скорости при появлении возму-
щающих воздействий, например при изменении нагрузки, при-
кладываемой к валу электродвигателя.
Одним из основных показателей, характеризующих реаги-
рование скорости электропривода, является диапазон регулиро-
вания Диапазон регулирования D - это отношение максимальной
установившейся скорости электропривода к минимальной при
изменении нагрузки на валу двигателя в заданных пределах. Оп-
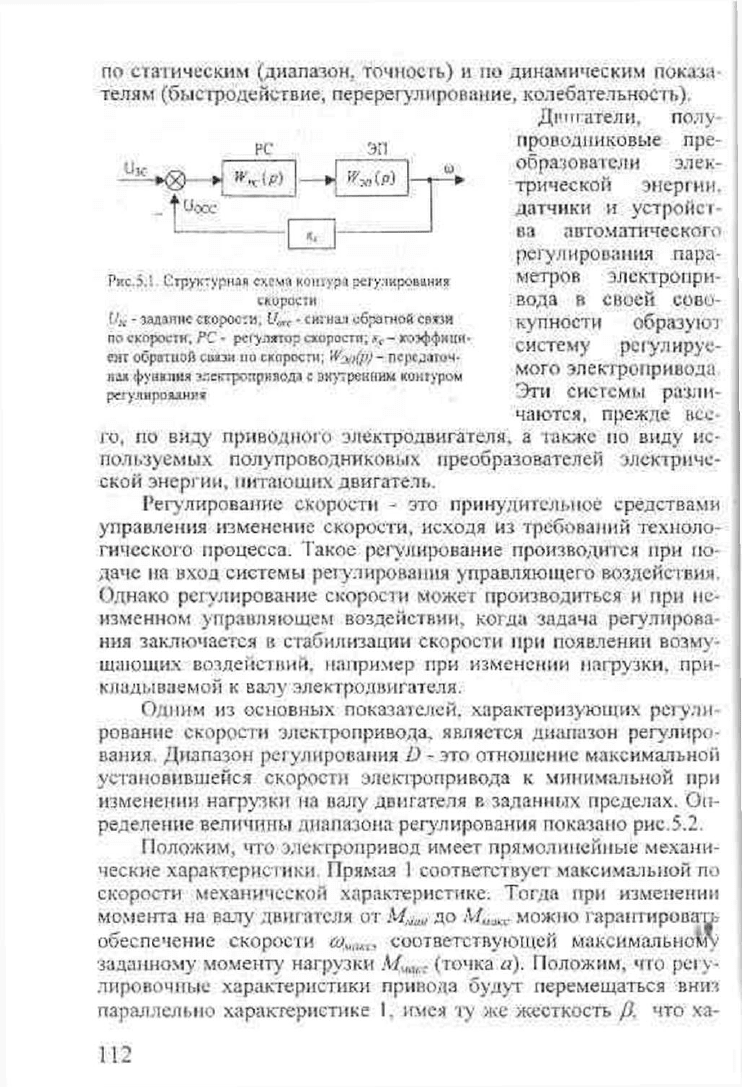
ределение величины диапазона регулирования показано рис.5.2.
Положим, что элекгропризод имеет прямолинейные механи-
ческие характеристики Прямая
1
соответствует максимальной по
скорости механической характеристике: Тогда при изменении
момента на валу двигателя от И-ьы до Л/
макг
можно гарантировать
обеспечение скорости соответствующей Максимальному
заданному моменту нагрузки Л/
1(1
„,- (точка а). Положим, что регу-
лировочные характеристики привода будут перемещаться вниз
параллельно характеристике I. имея ту же жесткость Д что ха-
рс эп
Ркс.5.' Структурная схема контурарегулирования
tKopuc:»t
f- задание скороо:и. и
лт(
-
сигнал сбитой ептзи
по
скорости. PC - регулятор скорости; - гоэффици-
елт oopaiuoft саизн ни скорости;
'A'i\,(i>}
- гкрелюч-
г.лх
фуниш'я ?лсктролрг:лодл
с
внутренним контуром
регулирование
'110.5.2 К определению диапазона
регулирования по скорости
Из графиков рис.5.2. найдем:
рактерио для оольшинства
современных систем регули-
руемого электропривода.
Очевидно, что нижняя пре-
дельная характеристика, ко-
торая будет обеспечивать
требуемый максимальный
момент, будет характерис-
тика 2. То1да гарантируемая
минимальная скорость, ко-
торую можно обеспечить
при заданных изменениях
нагрузки, будет ео
шш
, что
соответствует точке б Диа-
пазон регулирования будет
Подставляя эти значения в (5.1). получим:
Wmt.
Из этой формулы следует, что диапазон регулирования зави-
от жесткости механических характеристик привода: чем
>льще жесткость, тем больше диапазон регулирования.
Вторым важным показателем качества (регулирования явля-
[стся точность регулирования скорости. Статическая ошибка .
>актеризует реакцию электропривода па приложение (снятие)
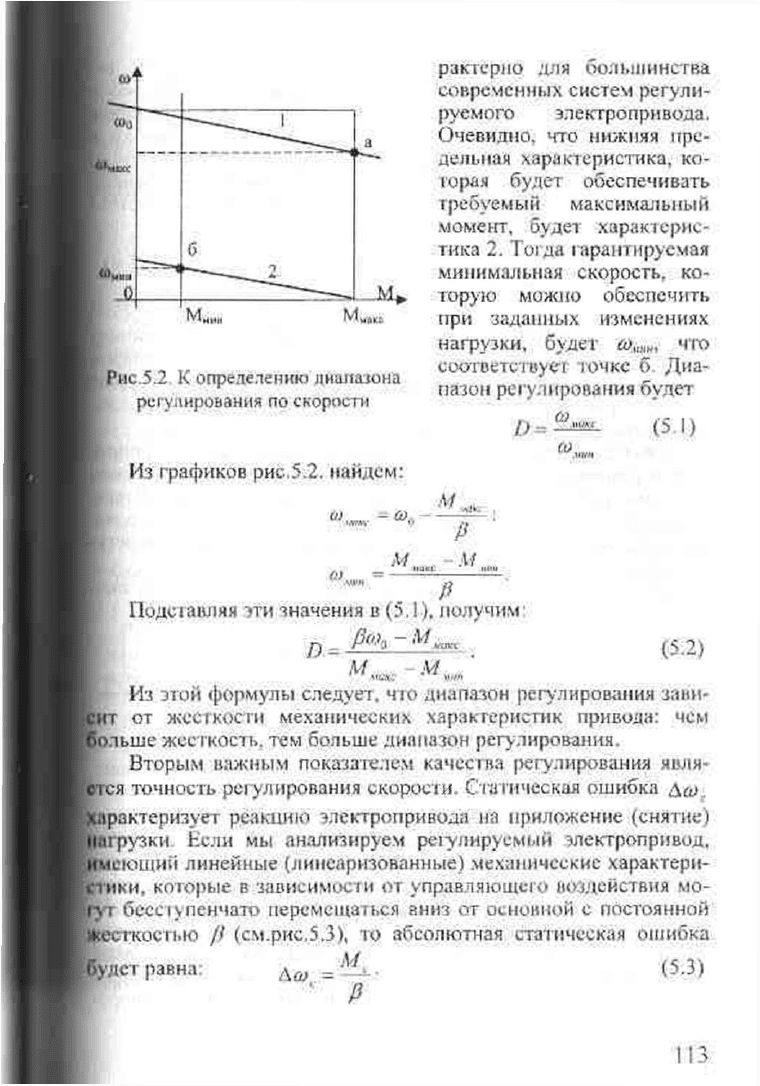
[агрузки Если мы анализируем ре1улируемыЙ электропривод,
юющий линейные (линеаризованные) .механические характерн-
ей, которые в зависимости от управляющего воздействия мо-
fyr бесступснчато перемещаться вниз от основной с постоянной
гкоетт.ю // (см.рис.5.3), го абсолютная статическая ошибка
М
(5.3)
дост равна
Относительная ве-
личина ошибки нахо-
дится как отношение
абсолютной ошибки к
базовой
скорости
скорости
хода).
Леи.
(заданной)
(заданной
холостого
(5.4)
Рнс.5.3.
К
определению стат четкой ршкбхи
м« м Из (5.3) и (5.4)
следует, что величина
статической ошибки,
связанной с возмущением по нагрузке, обратно пропорциональна
жесткости механических характеристик: чем больше жесткость,
гем меньше статическая ошибка.
Обычно жесткость механических характеристик электропри-
вода с разомкнутой системой управления недостаточна для дос-
тижения требуемого диапазона регулирования и требуемой ста-
тической ючностн. Потому в регулируемых электроприводах,
как правило, используются замкнутые но скорости системы регу-
лирования
Рассмотрим влияние отрицательной обратной связи по ско-
рости на механические характерис тики электропривода.
Р
Т,р+
I
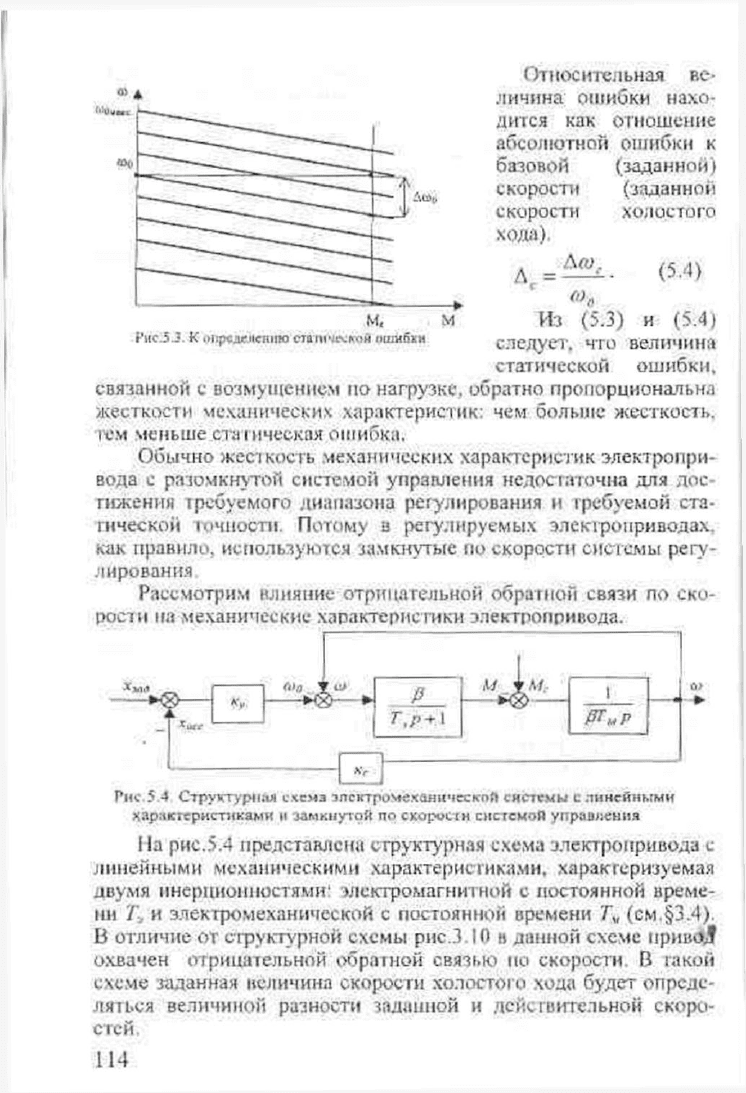
Рис.5.4 Структурная схема элсктроХ1еханичсскпй системы с лннсйиьгми
характеристиками и .имкнутрй по скорости системой упрашгения
На рис.5.4 представлена структурная схема электропривода с
линейными механическими характеристиками, характеризуемая
двумя инершюпиостями' электромагнитной с постоянной време-
ни У', и электромеханической с постоянной времени Г„ (ем.§3.4).
В отличие от структурной схемы рис.3.10 в данной схеме привод
охвачен отрицательной обратной связью по скорости В такой
схеме заданная величина скорости холостого хода будет опреде-
ляться величиной разности заданной и действительной скоро-
стей.
Мы» = -
>
= -
к
у
к
\-°->
•
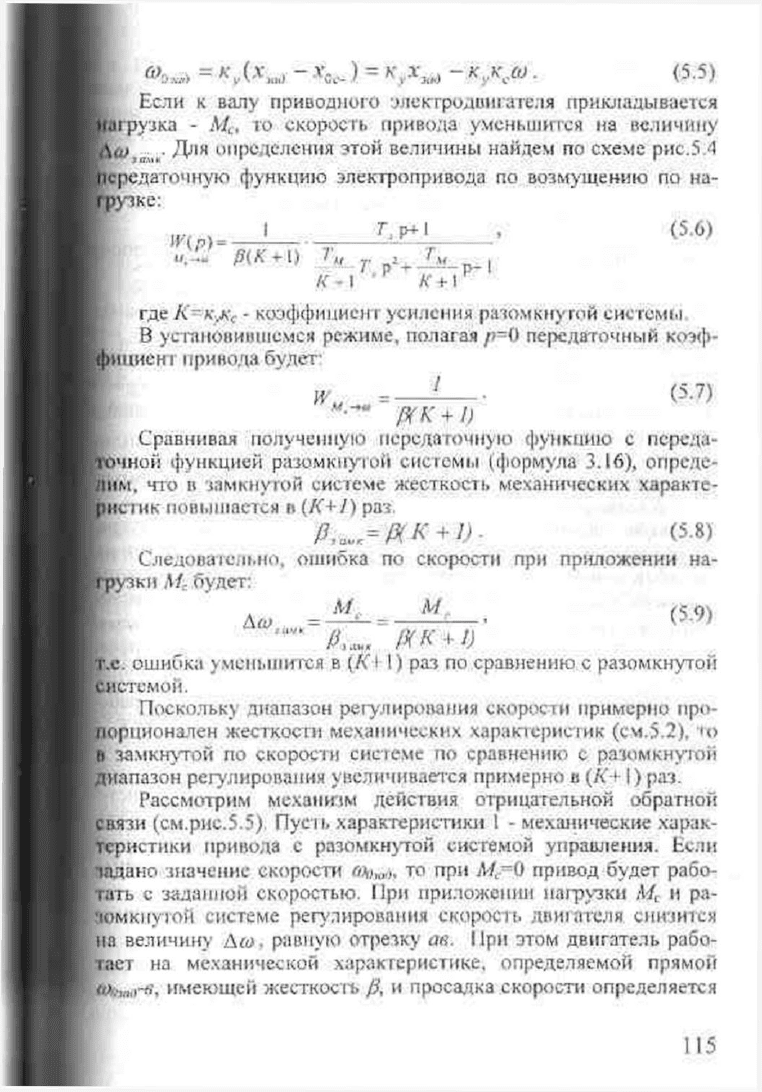
(5.5)
Если к валу приводного электродвигателя прикладывается
грузка - Л/
с
. то скорость привода уменьшится на величину
. Дня определения этой величины найдем по схеме рис.5 -I
)средаточную функцию электропривода по возмущению по на-
»ке:
Ми-] , (5.6)
1
. р + тггт Р"
1
Щр)=
I
II
К -
I
К +1
где К-КуК
с
- коэффициент усиления разомкнутой системы
В установившемся режиме, полагая р~0 передаточный коэф-
иниенг привода будет-
: L • (5.7)
W
м.
Р(К +1)
Сравнивая полученную передаточную функцию с переда-
чной функцией разомкнутой системы (формула 3.16), опреде-
им. что в замкнутой системе жесткость механических характе-
тнк повышается в (/<"+/) раз.
<5.8)
Следовательно, ошибка по скорости при приложении на-
кн Мс будет:
М. М. ^ ty
С
Aw. =
—
»••
_
/Ц, + »
Й\с. ошибка уменьшится в
(/<"1
I) раз по сравнению с разомкнутой
(Системой.
Поскольку диапазон регулирования скорости примерно про-
порционален жесткости механических характеристик (см.5.2), ''о
в замкнутой по скорости системе по сравнению с разомкнутой
диапазон регулирования увеличивается примерно в (АЧI) раз.
Рассмотрим механизм действия отрицательной обратной
[связи (см.рис.5.5). Пусть характеристики
1
- механические харак-
теристики привода с разомкнутой системой управления. Если
Выдано значение скорости 6W), то при привод будет рабо-
тать с заданной скоростью. При приложении нагрузки М
с
и ра-
зомкнутой системе регулирования скорость двигателя снизится
на величину А со. равную отрезку ав. 11ри этом двигатель рабо-
тает на механической характеристике, определяемой прямой
ЛЛьмоИ, имеющей жесткость Д и просадка скорости определяется
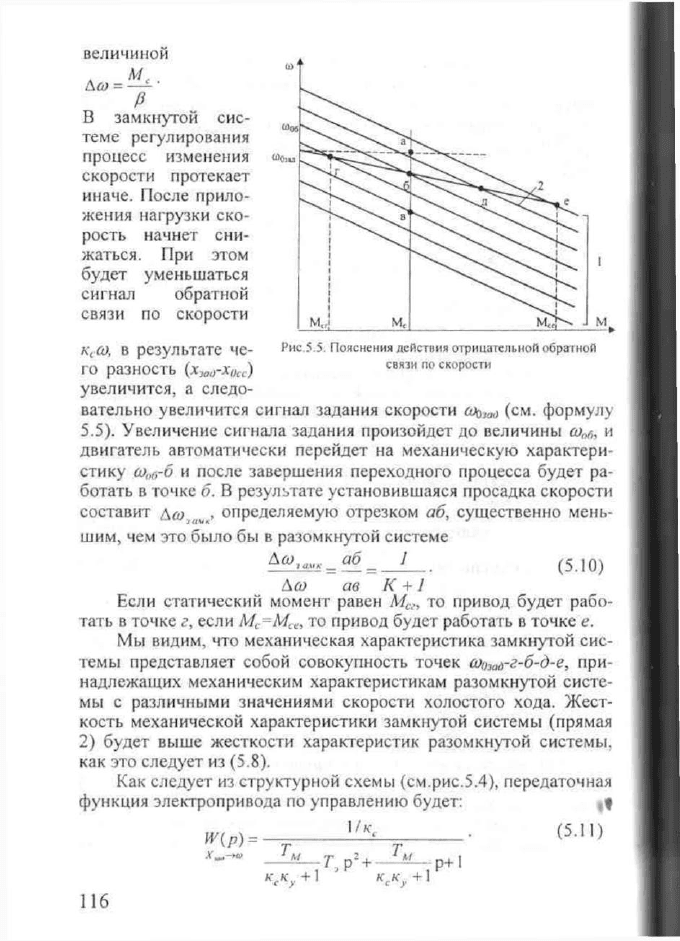
Л
<у
=
:
величиной
Р
В замкнутой сис-
теме регулирования
процесс изменения
скорости протекает
иначе. После прило-
жения нагрузки ско-
рость начнет сни-
жаться. При этом
будет уменьшаться
сигнал обратной
связи по скорости
Рис.5.5. Пояснения действия отрицательной обратной
связи по скорости
к,
со,
в результате че-
го разность (х
ш
-х,ьс)
увеличится, а следо-
вательно увеличится сигнал задания скорости соо
>ад
(см. формулу
5.5). Увеличение сигнала задания произойдет до величины соы>, и
двигатель автоматически перейдет на механическую характери-
стику со,„-6 и после завершения переходного процесса будет ра-
ботать в точке б. В результате установившаяся просадка скорости
составит определяемую отрезком аб, существенно мень-
шим, чем это было бы в разомкнутой системе
=
1
(5.10)
Д со ав К +1
Если статический момент равен М
сг
, то привод будет рабо-
тать в точке г, если М
с
=М
се
, то привод будет работать в точке е.
Мы видим, что механическая характеристика замкнутой сис-
темы представляет собой совокупность точек сощ^-г-б-д-е, при-
надлежащих механическим характеристикам разомкнутой систе-
мы с различными значениями скорости холостого хода. Жест-
кость механической характеристики замкнутой системы (прямая
2) будет выше жесткости характеристик разомкнутой системы,
как это следует из (5.8).
Как следует из структурной схемы (см.рис.5.4), передаточная
функция электропривода по управлению будет: ,t
'Ч . (5.11)
И'(р)
=
.г
Л/ Y
к
с
к
у
+
1
к
с
к
у
+1
Передаточная функция по возмущению по нагрузке выража-
я формулой (5.6). Как следует из этих выражений, использо-
нне отрицательной обратной связи по скорости позволяет по-
ысить быстродействие электропривода при изменении сигнала
равления и при отработке возмущающего воздействия. Это
1едует из того, что электромеханическая постоянная времени
L, характеризующая инерционность механической части элек-
Т
привода, уменьшается в (К+1) раз, т.е. Т
Шкв
= —— .
К +1
Это очень важное свойство - повышение быстродействия
ивода - которое дает отрицательная обратная связь по скоро-
ти, сопряжено с существенным недостатком - возрастанием ко-
ебательности привода. Выше (см.§3.4) было показано, что, ес-
И7'
л
, >4Т , то переходные процессы в приводе носят экспонен-
Иальный характер без колебаний. Если же Т
и
<4Т
0
, то пере-
одный процесс носит колебательный характер с частотой и дек-
сментом затухания, определяемыми формулами (3.13).
\ Обычно электромеханическая постоянная времени Т
м
боль-
шие, чем 4Т„ и в разомкнутой системе регулирования скорости
рлебания не наблюдаются. Введение отрицательной обратной
вязи по скорости уменьшает эквивалентную электромеханиче-
скую постоянную времени Тм
жв
, причем, чем больше коэффици-
ент обратной связи по скорости к
с
, тем меньше Т
М7Кв
. Поэтому в
Ьмкнутых системах при использовании отрицательной обратной
Ьвязи по скорости Г
А
/„„ становится меньше
4 Т
3
,
и переходные
цессы в системе приобретают колебательный характер.
Таким образом, введение отрицательной обратной связи по
скорости повышает жесткость механических характеристик при-
вода, уменьшает статическую ошибку, расширяет диапазон регу-
лирования скорости, повышает быстродействие привода, но ведет
к колебательности переходных процессов. Для снижения колеба-
тельности в систему регулирования вводят корректирующие ди-
намические звенья. Способы формирования переходных процес-
сов требуемого характера рассмотрены в разделе П.
5.2. Основные системы регулируемого электропривода
Развитие систем регулируемого электропривода исторически
было связано с развитием преобразовательной техники. В на-
стоящее время все системы регулируемого электропривода вы-
полняются на основе силовых полупроводниковых преобразова-
телей, построенных на управляемых полупроводниковых прибо-
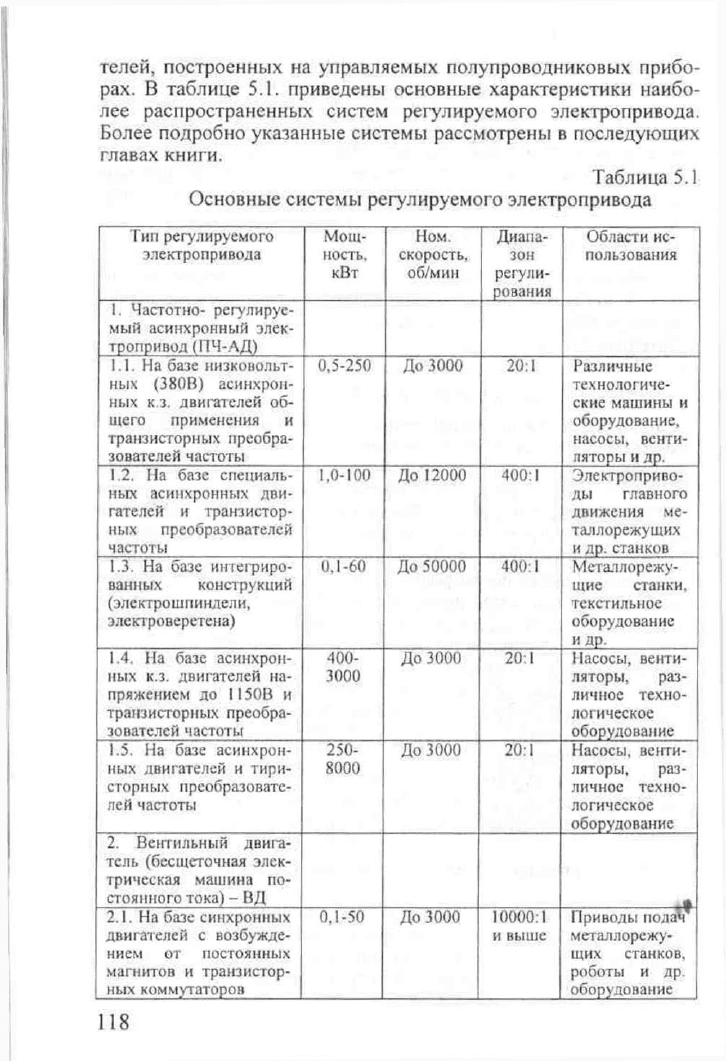
рах. В таблице 5.1. приведены основные характеристики наибо-
лее распространенных систем регулируемого электропривода.
Более подробно указанные системы рассмотрены в последующих
главах книги.
Таблица 5.!
Основные системы регулируемого электропривода
Тип регулируемого
электропривода
Мощ-
ность.
кВт
Ном
скорость,
об/мин
Диапа-
зон
регули-
рования
Области ис-
пользования
1. Частотно- регулируе-
мый асинхронный элек-
тропривод (ПЧ-АД)
1.1. На базе низковольт-
ных (380В) асинхрон-
ных к з. двигателей об-
щего применения и
транзисторных преобра-
зователей частоты
0,5-250 До 3000
20:1 Различные
технологиче-
ские машины и
оборудование,
насосы, венти-
ляторы и др.
1.2. На базе специаль-
ных асинхронных дви-
гателей и транзистор-
ных преобразователей
частоты
1,0-100 До 12000 400:1
Электроприво-
ды главного
движения ме-
таллорежущих
и др. станков
1.3. На базе интегриро-
ванных конструкций
(электрошпиндели,
элсктроверетена)
0,1-60
До 50000 400:1 Металлорежу-
щие станки,
текстильное
оборудование
и др.
1.4. На базе асинхрон-
ных к.з. двигателей на-
пряжением до 1150В и
транзисторных преобра-
зователей частоты
400-
3000
До 3000 20:1 Насосы, венти-
ляторы, раз-
личное техно-
логическое
оборудование
1.5. На базе асинхрон-
ных двигателей и тири-
сторных преобразовате-
лей частоты
250-
8000
До 3000 20:1 Насосы, венти-
ляторы, раз-
личное техно-
логическое
оборудование
2. Вентильный двига-
тель (бесщеточная элек-
трическая машина по-
стоянного тока) - ВД
*
2.1. На базе синхронных
двигателей с возбужде-
нием от постоянных
магнитов и транзистор-
ных коммутаторов
0,1-50
До 3000
10000:1
и выше
Приводы пода
1
)*
металлорежу-
щих станков,
роботы и др.
оборудование
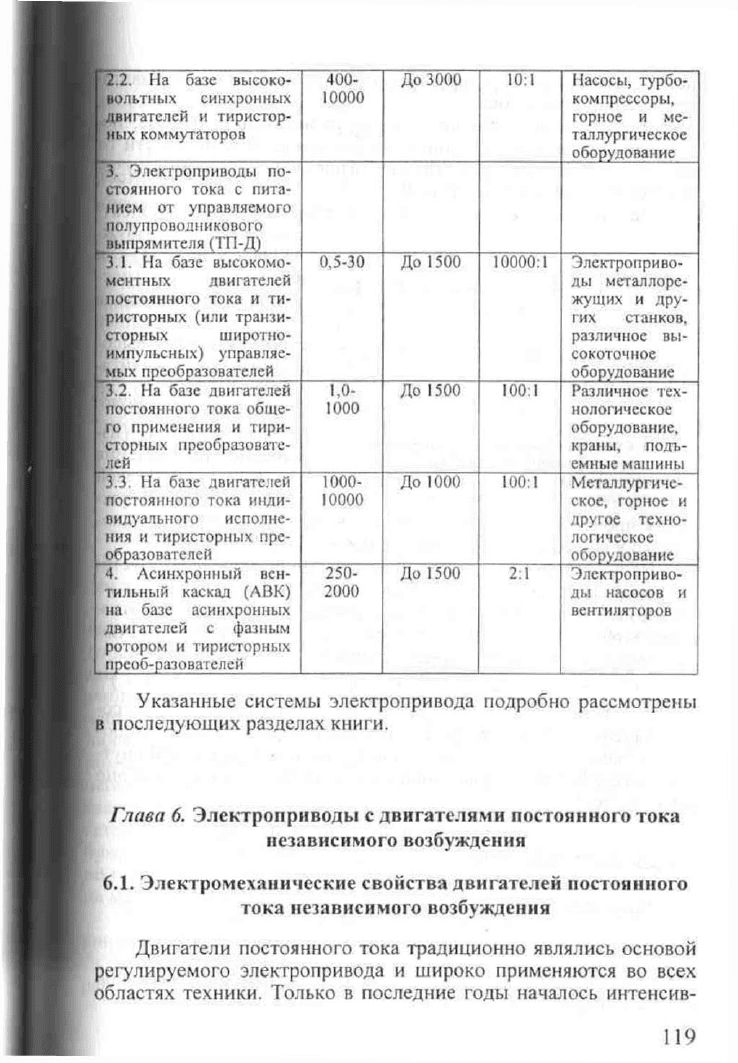
На базе высоко-
вольтных синхронных
"игатслей и тиристор-
"ых коммутаторов
400-
10000
До 3000 10:1
Насосы, турбо-
компрессоры,
горное и ме-
таллургическое
оборудование
Электроприводы по-
эянного тока с пита-
нем от управляемого
"лупроводникового
прямителя (ТП-Д)
. I. На базе высокомо-
ентных двигателей
остоянного тока и ти-
исторных (или транзи-
тных широтно-
<(пульсных) управ.чяе-
преобразователей
0,5-30
До 1500
10000:1
Электроприво-
ды металлоре-
жущих и дру-
гих станков,
различное вы-
сокоточное
оборудование
На базе двигателей
остоянного тока обще-
го применения и тнри-
торных преобразовате-
лей
1,0-
1000
До 1500
100:1 Различное тех-
нологическое
оборудование,
краны, подъ-
емные машины
.3. На базе двигателей
постоянного тока инди-
'идуального исполне-
ния и тиристорных пре-
5разователей
1000-
10000
До 1000
100:1
Металлургиче-
ское, горное и
другое техно-
логическое
оборудование
4. Асинхронный вен-
тильный каскад (АВК)
на базе асинхронных
двигателей с фазным
ротором и тиристорных
. преоб-разова гелей
250-
2000
До 1500
2:1
Электроприво-
ды насосов и
вентиляторов
Указанные системы электропривода
в последующих разделах книги.
подробно рассмотрены
Глава 6. Электроприводы с двигателями постоянного тока
независимого возбуждения
6.1. Электромеханические свойства двигателей постоянного
тока независимого возбуждения
Двигатели постоянного тока традиционно являлись основой
регулируемого электропривода и широко применяются во всех
областях техники. Только в последние годы началось интенсив-
нос использование регулируемых электроприводов на базе двига-
телей переменного тока.
Двигатели постоянного тока могут иметь независимое, по-
следовательное или смешанное возбуждение. В зависимости от
схемы возбуждения существенно разнятся и электромеханиче-
ские характеристики двигателей.
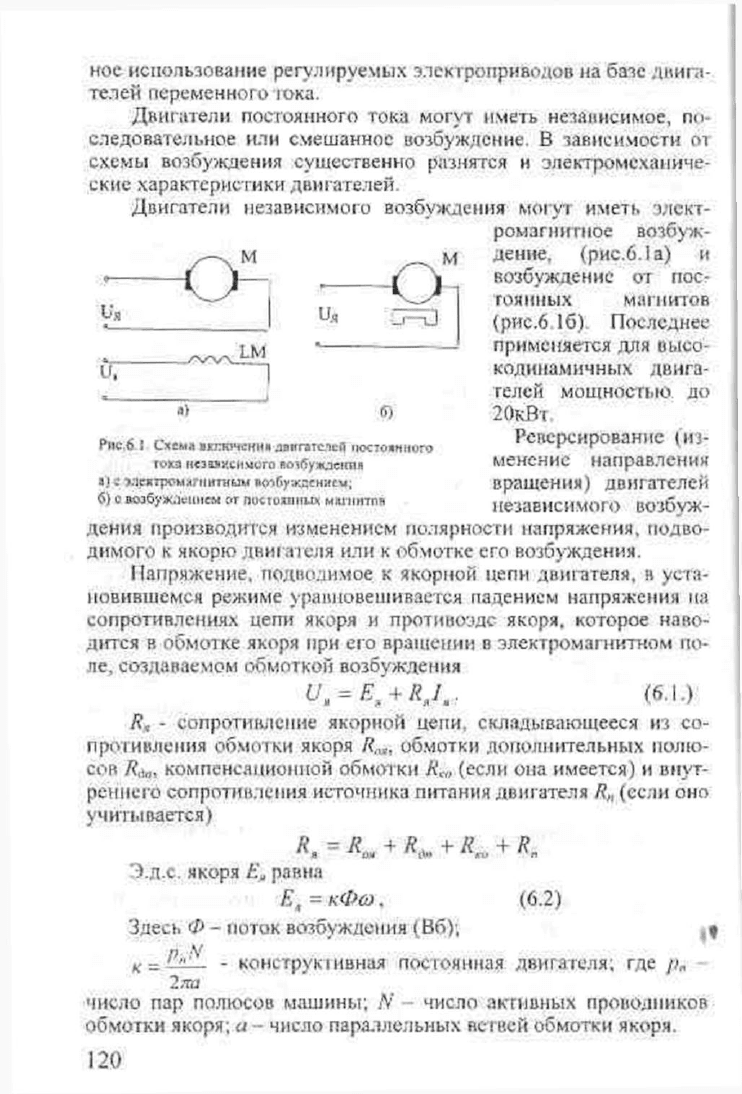
Двигатели независимого возбуждения могуч иметь элект-
ромагнитное возбуж-
дение. (рис.6.1а) и
возбуждение от пос-
тоянных магнитов
(рис.6 16) Последнее
применяется для высо-
кодинамичных двига-
телей мощностью до
20кВт
Реверсирование (из-
менение направления
вращения) двигателей
независимого возбуж-
дения производится изменением полярности напряжения, подво-
димого к якорю днигателя или к обмотке его возбуждения.
Напряжение, подводимое к якорной цепи двигателя, в уста-
новившемся режиме уравновешивается падением напряжения на
сопротивлениях цепи якоря и противоэде якоря, которое наво-
дится в обмотке якоря при его вращении в электромагнитном по-
ле, создаваемом обмоткой возбуждения
U
K
= E, + V.- ШШ
R< - сопротивление якорной цепи, складывающееся из со-
противления обмотки якоря
Rom,
обмотки дополнительных полю-
сов компенсационной обмотки (если она имеется) и внут-
реннего сопротивления источника питания двигателя
R„
(если оно
учитывается)
Д. -
R
a*
+ +
+
R
n
Э.д.с. якоря
Е
м
равна
Е
щ
= кФй). (6.2)
Здесь Ф - поток возбуждения (Вб);
р Н
k^Lh— - конструктивная постоянная двигателя; где />„
2 ли
число пар полюсов машины; N число активных проводников
обмотки якоря; а - число параллельных ветвей обмотки якоря.
и.
м
и<
о
—
1
l3
и.
л>
б)
Рис,6 Схема включении двигателей постоянного
гоха нсзаихснмога Roitfyaucimn
ai г меятромипиетным потбу-.кгением;
б) с возбуждением 6т писгояяних мынитпв