Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

И больших скольжениях наводится значительная э.д.с. сколь-
]Я.
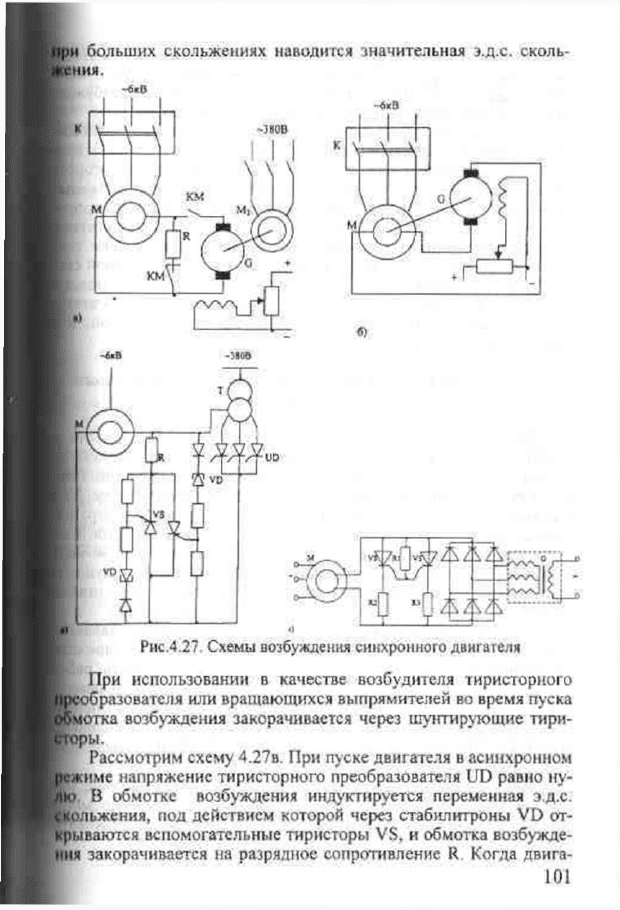
При использовании в качестве возбудителя тиристорного
разователя или вращающихся выпрямителей во время пуска
*а возбуждения закорачивается через шунтирующие тири-
ы.
Рассмотрим схему 4.27в. При пуске двигателя в асинхронном
:име напряжение тиристорного преобразователя UD равно ну-
В обмотке возбуждения индуктируется переменная э.д.с.
ьжения, под действием которой через стабилитроны VD от-
ваются вспомогательные тиристоры VS, и обмотка возбужде-
I
закорачивается на разрядное сопротивление R Когда двига-
Рис.4.27. Схемы возбуждения синхронного двигателя
гель достигает подсинхронной скорости, э.д.с. скольжения стано-
вится малой, стабилитроны запираются и тиристоры VS отклю-
чают разрядное сопротивление, после чего в обмотку возбужде-
ния подается постоянный ток от преобразователя UD.
В последние годы получили распространение возбудители,
встроенные в конструкцию синхронной машины (рис.4.27г). Воз-
будитель состоит из синхронного генератора G, ротор которого
расположен на валу синхронного двигателя М, неуправляемых
выпрямителей, вспомогательных тиристоров и разрядных сопро-
тивлений, также размещенных на валу синхронного двигателя
Регулирование тока возбуждения производится изменением тока
возбуждения возбудителя G. По достижении подсинхронной ско-
рости цепи, шунтирующие обмотку возбуждения, размыкаются и
в обмотку подается постоянный ток. после чего двигатель втяги-
вается в синхронизм, его скорость достигает синхронной, и в
дальнейшем он работает в синхронном режиме.
4.7.3. Регулирование тока возбуждения синхронною
двигателя
Регулирование тока возбуждения двигателя при работе в
синхронном режиме осуществляется, как правило, САР возбуж-
дения. САР возбуждении выполняет две основные функции. Пер-
вая - обеспечение устойчивой работы в синхронном режиме. При
набросах нагрузки или при снижении величины питающего на-
пряжения САР возбуждения форсирует (увеличивает) ток воз-
буждения, благодаря чему увеличивается максимальный момент
двигателя в синхронном режиме (см.рис.4.26). Вторая - осущест-
вление автоматическою регулирования величины реактивной
мощности, циркулирующей в статорной цепи двигателя.
Важным достоинством синхронных двигателей является
возможность регулирования величины реактивной мощности,
циркулирующей в цепи статора, в том числе возможность, рабо-
тая двигателем, т.е. потребляя активную мощность, одновремен-
но генерировать реактивную мощность, т.е. работать компенса-
тором реактивной мощности, потребляемой другими параллельно
работающими приемниками электрической энерг ии, прежде все-
го асинхронными двигателями. .
Применение на предприятиях синхронных двигателей. На-
ряду с асинхронными, позволяет уменьшить реактивную мощ-
ность, потребляемую предприятием в целом, и поддерживать
ативное значение costp в энергосистеме данного предпри-
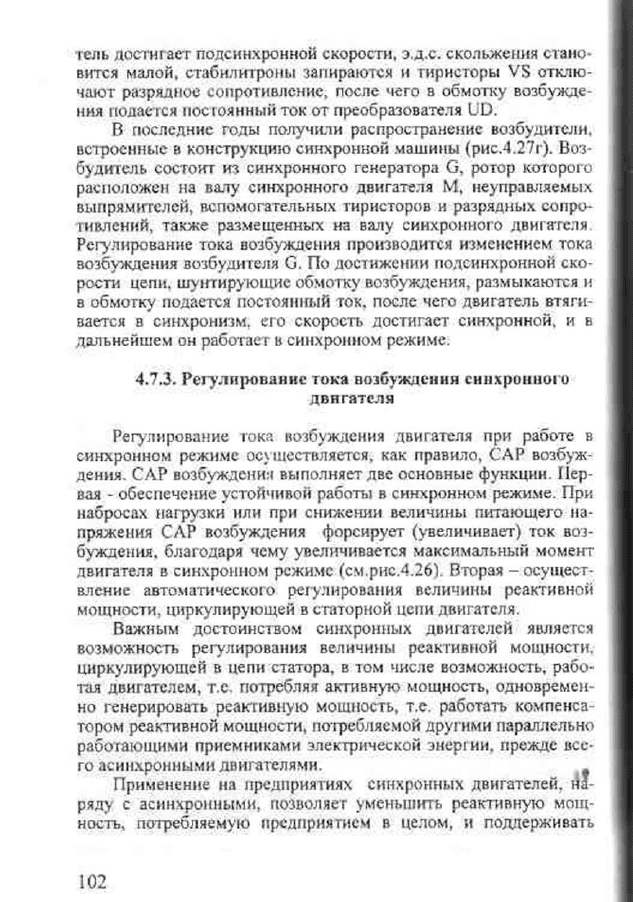
.4.28. Векторные диаграммы синхронного двигателя при разных то-
ках возбуждения и одинаковой нагрузке на валу
орная диаграмма (а) соответствует току возбуждения мень-
е номинального; при этом вектор тока статора /, отстает от вск-
ра напряжения сети Ь\ на угол (р, т.е. двигатель работает с от-
шими cos^> (реактнвная мощность «потребляется»). При
иченни тока возбуждения э.д.с. Ей наводимая в обмотках
статора, увеличивается
и может достигнуть
такого значения, при
котором ток статора /,
будет совпадать по
фазе с напряжением
£/,, т.е. costp-0
(см.рис.4.28б). Момент
на валу двигателя при
этом будет такой же,
как и в предыдущем
случае, но реактивная
мощность будет равна
нулю. Очевидно (это
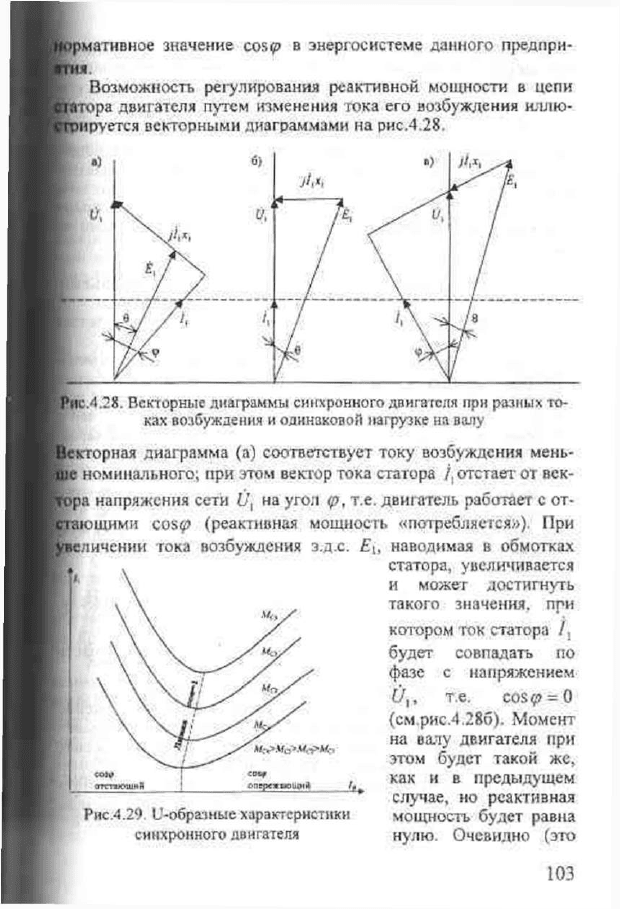
Рис.4.29. U-обрапные характеристики
синхронного двигателя
Возможность регулирования реактивной мощности в цепи
ра двигателя путем изменения тока его возбуждения иллю-
руется векторными диаграммами на рис.4.28.
следует из формулы (4.41) ток статора /, при данном моменте на-
грузки будет минимальным. Этот режим является энергетически
наиболее выгодным для синхронного двигателя» г.к потерн в ста-
торе будут минимальны.
Если еще больше увеличить ток возбуждения, то ток статора
будет опережать по фазе напряжение 6',, cosp станет опере-
жающим, и синхронный двигатель будет генерировать реактив-
ную мощность (см рис. 4.28в). Зависимость тока статора от тока
возбуждения синхронного двигателя отражается 6
г
-образными
характеристиками синхронного двигателя, представленными на
рис.4.29.
4.8. Асинхронный двигатель, как динамический объект
Динамические свойства асинхронного двигателя следует
рассматринагь для двух случаев.
Первый когда двигатель работает на рабочей части меха-
нической характеристики с малыми скольжениями при постоян-
ном потоке статора, и переходные режимы связаны, прежде все-
го. с изменениями нагрузки на валу двигателя. Второй случай
когда изменяется во времени поток двигателя; этот случай харак-
терен для условий пуска при подаче напряжения на обмотки ста-
тора.
Рассмотрим первый случай. Формулу Ююсса (4 30) для этого
случая можно упростить, поскольку при малых скольжениях чле-
ном <:/$х н знаменателе можно пренебречь и. считая рабочую
часть механической характеристики в пределах скольжений от 0
до линейной, получим
Л/ = ^ = К -
(О)
= а)) (4.47)
s
K
S
K
6)
0
М
где f\-l—L- - жесткость линеаризированной рабочей частй
ЩЩ
механической характеристики асинхронного двигателя.
При малых скольжениях ток ротора можно приближенно
считать активным, поэтому момент двигателя пропорционален
току. При приложении нагрузки к валу двигателя скольжение
увеличивается, увеличивается э.д.с ротора и возрастает ток рото^
ра. Однако из-за значительной индуктивности обмоток двигателя
нарастание тока протекает во времени примерно по экспонении-
>му закону с постоянной времени
т = b. lb.
Г, + r
{
•скольку момент пропорционален току /;, то по аналогии с (3.9)
Ш
Л/ + Т
э
—— = fi(co
Q
- со).
at
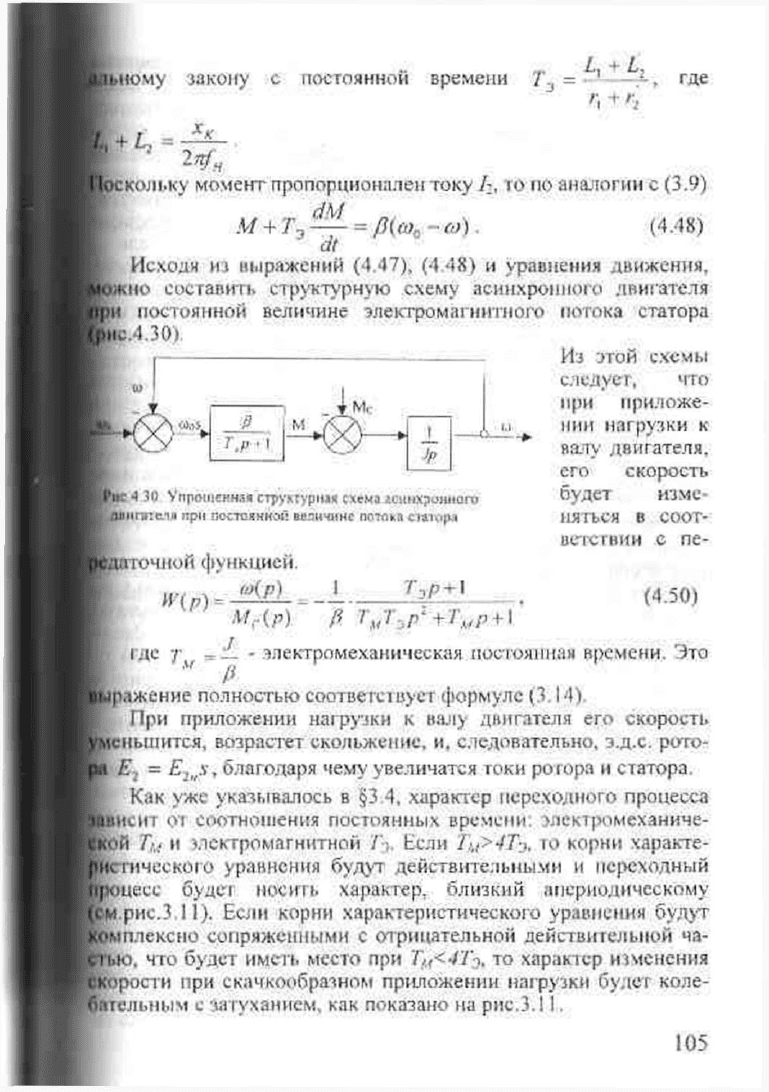
Исходи из выражений (4.47), (4.48) и уравнения движения,
сно составить структурную схему асинхронного двигателя
)к постоянной величине электромагнитного потока статора
жо.4.30)
Из этой схемы
следует, что
при приложе-
нии нагрузки к
валу двигателя,
его скорость
будет изме-
няться в соот-
ветствии с пе-
<ЛлУ
iff
Т,р
« 1
: А
30 Vпрошения* струлгурмм схема 1сннх?он1шго
ниппели при постоянной величине потока ciaivipa
>чной функцией.
Г
эР
+1
(4.50)
МЛг)
где J
,\f
__ - электромеханическая пос тоям пан времени. Это
/<
»жение полностью соответствует формуле (3.14).
При приложении нагрузки к валу двигателя его скорость
тьшится, возрастет скольжение, и. следовательно, э.д.с. рото-
,
Е, = E
2i/
s, благодаря чему увеличатся токи ротора и статора.
Как уже указывалось в §3 4, характер переходного процесса
Hieит ОТ соотношения постоянных времени: электромеханиче-
)й и )лектромагннтной /•>, Если Гм>4Тэ, то корни характе-
нческою у ран нения будут действительными и переходный
сс будег носить характер, близкий апериодическому
м.рис.З II). Если корни характеристического уравнения будут
комплексно сопряженными с отрицательной действительной ча-
>, что будет иметь место при то характер изменения
jpociH при скачкообразном приложении нагрузки будет коле-
зльным с затуханием, как показано на рне.3.1!.
4
m M
u
Переходные процессы,
происходящие R асин-
хронном двигателе при
сто включении в сеть и
разгоне до рабочей ско-
рости, связаны со слож-
ными электромагнитны-
ми процессами, происхо-
дящим в двигателе н
связанными с формирова-
нием электромагнитного
поля, вращающегося в
пространстве со скорос-
тью щ
Рис 4.51
I
Icpc.vjunuc характеристики момента и
угловпН скорби нейтронного
.I3MI
л
сяк
при
Асинхронный двигатель
содержит трехфазную
систему магннтосвязан-
ных обмоток статора и
nyoke.
и)
бплмстл
5йе«арома1
ннтнм.х перекоят роюра 11рИ ПОДКЛЮЧС-
сети к обмотках из-за наличия индуктивностей и вэаимоиндук-
тишюстей возникают переходные гоки, содержащие принужден-
ные и свободные составляющие. ")ти токи создают принужден-
ные и свободные составляющие магнитных потоков статора и ро-
тора, которые, взаимодействуя друг с другом, создают электро-
магнитный момент, изменяющийся в функции времени и сколь-
жения по сложным законам Поля, образуемые свободными то-
ками. могут усиливать или ослаблять поле, образуемое принуж-
денными (г.е.установивгаимися) значениями поля, вызывая коле-
бательность переходного значения электромагнитного момента
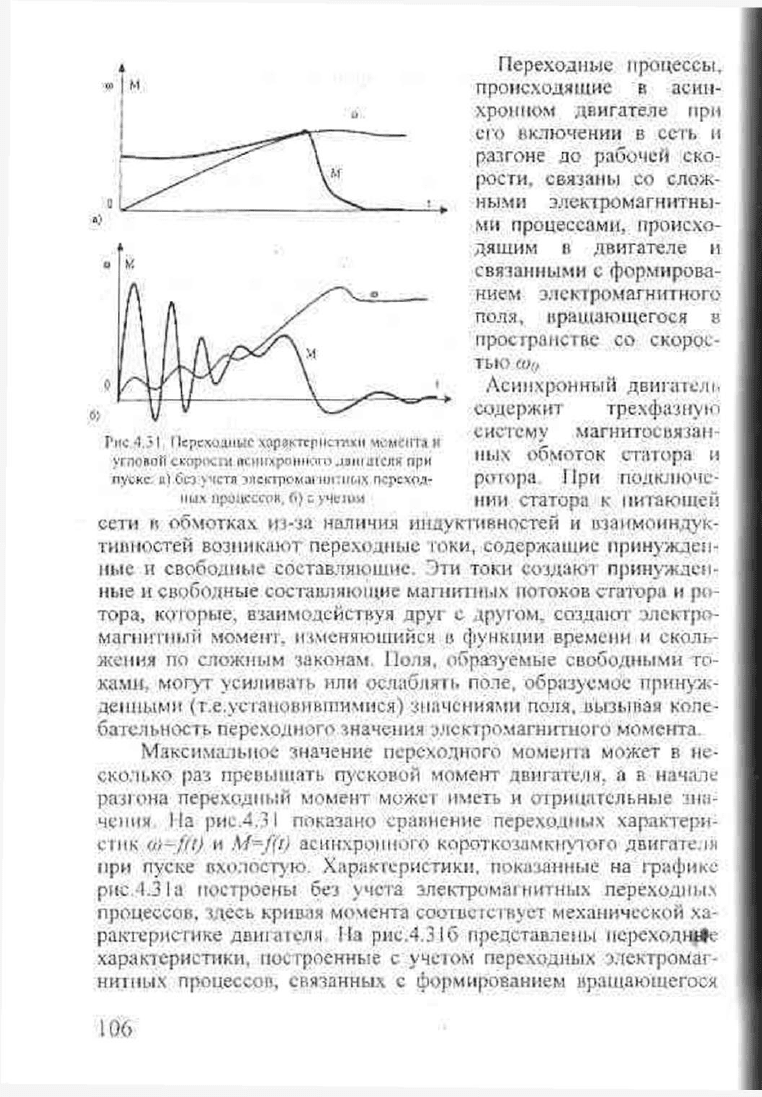
Максимальное значение переходного момента может в не-
сколько раз превышать пусковой момент двигателя, а в начале
разгона переходный момент может иметь и отрицательные зна-
чения Па рис.4. п| показано сравнение переходных характери-
стик 0-/(1) и M-f(i) асинхронного короткозам кнут ого двигателя
при пуске вхолостую. Характеристики, показанные на графике
рис 1.3!а построены без учета электромагнитных переходных
процессов, здесь кривая момента соответствует механической ха-
рактеристике двигателя Па рие.4.31б представлены переходное
характеристики, построенные с учетом переходных электромаг-
нитных процессов, связанных с формированием вращающегося
них нриисссрк.
О)
с учешм
НИИ статора к питающей
юмагнитного поля статора и токов ротора в процессе вклю-
ия обмоток статора в сеть и разгона до установившейся ско-
ги (в данном случае до а>
0
). Из рассмотрения характеристики
видно, что величина момента колеблется относительно
ачений момента, определенных по механической характери-
двнгателя. Ввиду значительной сложности анализа рас-
иваемых процессов для более подробного изучения читате-
1 следует обратиться к дополнительной литературе [1-3].
4.9. Синхронный двигатель, как динамический объект
Зависимость момента синхронного двигателя от пространст-
ого угла в между осями вращающегося магнитного поля и
ра лннсаризованно (см 4.42) может быть представлена как
М-иО. (4.51)
Такое соотношение говорит о том, что по своим динамиче-
ш свойствам синхронный двигатель подобен пружине - чем
ьше угол закручивания, тем больше момеш. Это обстоя тель-
обьясняет склонность синхронной машины к колебаниям
оло установившегося значения 0
>vm
, определяемого моментом
узки на валу двигателя, Дня демпфирования колебаний ис-
ьзуется пусковзя (асинхронная) короткозамкнутая обмотка,
положенная на роторе двигателя. Демпфирующий момент,
иваемый благодаря наличию этой обмотки будет согласно
М7)
где (} - жесткость рабочей части механической характерн-
ки двигателя в асинхронном режиме.
Выражение (4.52) говорит о том, что как только скорость ро-
ра синхронного двигателя отклоняется по величине от скорости
оля соо, возникает момент Иаыя, стремящийся восстановить ра-
нство скоростей ротора и поля. Если учесть, что угол в есть ин-
ал разности скоростей
0 = \(io
0
-<o)dt, (4 53)
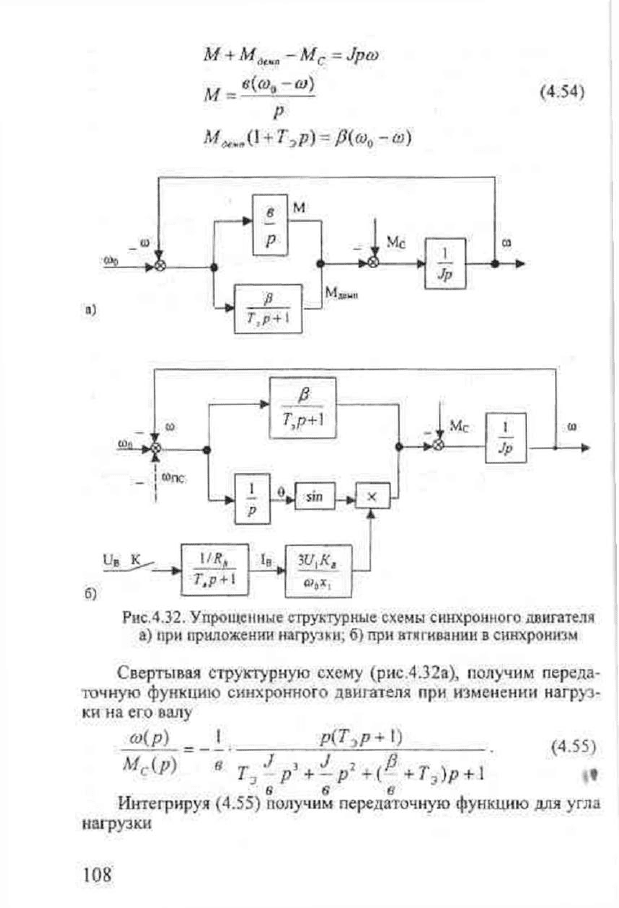
можно составить структурную схему, отражающую динамиче-
ie свойства синхронного двигателя при приложении нагрузки
(рис.4.32а). В этой схеме моменты, отражающие взаимодействие
вращающегося электромагнитного поля с током (потоком) в об-
мотках ротора, суммируются. Структурная схема (4.32а) отража-
ет следующие уравнения в операторной форме:
M
+
M
<)tua
-M
c
=Jpo>
и
в{<0
9
-0>)
р
M^UT^fiicot-
а)
м
7>+!
Мс
(4.54)
•-Г
0
7>
+
1
©пс
L'
B
К
1 /R,
10
1
ги
х
к
а
Т,р
+ \
01
0
х,
Мс
Рнс.4.32. Упрощенные структурные схемы синхронного двигателя
а) при приложении нагрузки; б) при втягивании в синхронизм
Свертывая структурную схему (рис.4.32а), получим переда-
точную функцию синхронного двигателя при изменении нагруз-
ки на его валу
со(р) _ I Р(Т
0
р+\)
МЛр)
г/ Р
3
+ -Р
2
Н
/
* + Т
э
)Р + \
(4.55)
««
Интегрируя (4.55) получим передаточную функцию для угла
нагрузки
0{р) _ 1
млр) б
т
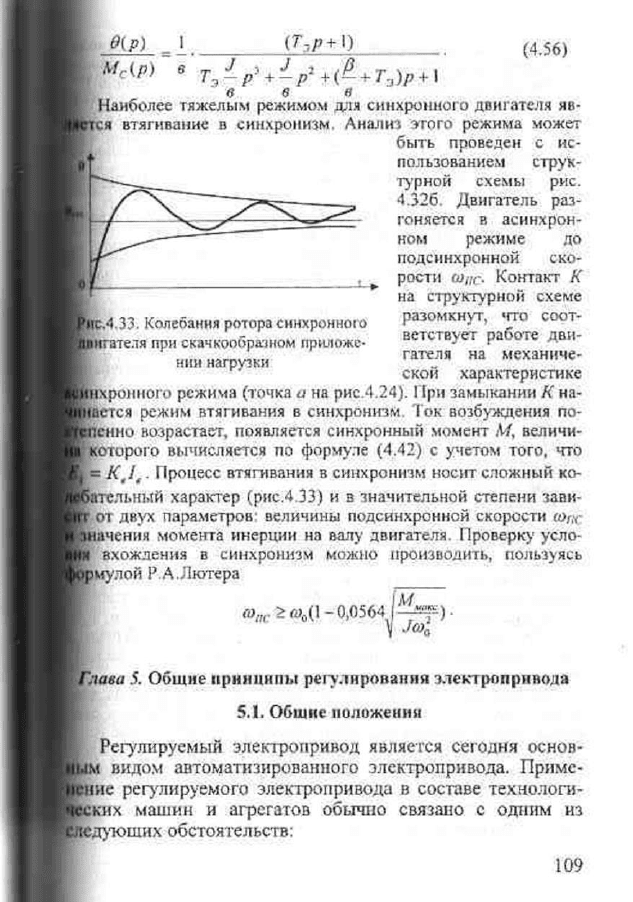
г Наиболее тяжелым режимом для синхронного двигателя яв-
гся втягивание в синхронизм. Анализ этого режима может
быть проведен с ис-
пользованием струк-
турной схемы рис.
4.326. Двигатель раз-
гоняется в асинхрон-
ном режиме до
подсинхронной ско-
рости (ицс. Контакт К
на структурной схеме
юс.4.33. Колебания ротора синхронного
питателя при скачкообразном приложе-
нии нагрузки
разомкнут, что соот-
ветствует работе дви-
гателя на механиче-
ской характеристике
й1Нхронного режима (точка и на рис.4.24). При замыкании К на-
мается режим втягивания в синхронизм. Ток возбуждения по-
гнно возрастает, появляется синхронный момент М, велнчи-
<оторого вычисляется по формуле (4.42) с учетом того, что
K
t
J
4
. Процесс втягивания в синхронизм носит сложный ко-
Йательный характер (рис.4.33) и в значительной степени зави-
р
от двух параметров величины подсинхронной скорости Юпс
•значения момента инерции на валу двигателя. Проверку усло-
вхождения в синхронизм можно производить, пользуясь
)Мулой Р.А.Лютера
«
т
.>гу
0
(1 -0,0564
IГлава 5. Общие принципы регулирования электропривода
5.1. Обшне положения
Регулируемый электропривод является сегодня основ-
« видом автоматизированного электропривода. Приме-
те регулируемого электропривода в составе технологи-
ях машин и агрегатов обычно связано с одним из
^следующих обстоятельств:
- необходимостью оперативного управления ходом техноло-
гического процесса (электроприводы грузоподъемных кранов,
экскаваторов, реверсивных прокатных станов и других машин).
- необходимостью устанавливать и точно выдерживать тех-
нологический режим (электроприводы станов непрерывной про-
катки, бумагоделательных машин, отделочных агрегатов тек-
стильной промышленности и др.);
- необходимостью корректировки технологического процес-
са (электроприводы питателей, дозаторов и др.);
- автоматическим управлением режимом обработки мате-
риала (электроприводы станков с ЧТТУ и др.);
- стремление оптимизирован, технологический процесс по
затратам электроэнергии (электроприводы насосов, вентилято-
ров, компрессоров).
Приведенный перечень обстоятельств, обуславливающих не-
обходимость или целесообразность применения регулируемою
электропривода, может быть расширен и дополнен.
По мере развития рабочих машин и механизмов, применения
высоких технологий потребность в регулируемых электроприво-
дах существенно возросла, и автоматизированный регулируемый
электропривод составляет энергетическую и кибернетическую (с
точки зрения управления) основу большинства рабочих машин и
агрегатов во всех технологических областях.
Автоматизированный электропривод выполняет две техно-
логические функции:
- преобразование элекгрической энергии в механическую,
необходимую для осуществления данного технологического про-
цесса;
- управление технологическим процессом, причем с опреде-
ленной степенью оптимизации этого процесса по ряду критериев,
таких как: обеспечение максимальной производительности, точ-
ности и качества обработки, минимального расхода энергии и
т.п.; конкретные задачи управления многообразны и определяют-
ся характером технологического процесса.
Вторая функция автоматизированного электропривода все-
цело связана с необходимостью регулирования параметров дви-
жения электропривода (скорости, момента, положения рабочего
органа). Выполнение этой функции возможно только посредст-
вом использования регулируемого электропривода. Использова-
ние для целей регулирования механических или гидравлических
средств (вариаторы, коробки передач, гидромуфты н др.) сегодня
является технически и экономически неоправданным