Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.


составляет 1-3% от номинального значения этой э.д.с. при s=1. Частота тока ро-
тора в номинальном режиме будет составлять всего 0,5-1,5Гц. При s=0, когда
скорость ротора равна скорости поля, э.д.с. ротора Е
2
и ток ротора I
2
будут рав-
ны нулю, момент двигателя также будет равен нулю. Этот режим является ре-
жимом идеального холостого хода.
Зависимость частоты э.д.с. и тока ротора от скольжения определяет
своеобразие механических характеристик асинхронного двигателя.
3.2.2. Механические характеристики асинхронного двигателя
Рассмотрим работу асинхронного двигателя с фазным ротором, обмотки
которого замкнуты накоротко.
Как уже указывалось (3.4), момент двигателя пропорционален потоку Ф
и активной составляющей тока ротора I
2а
, приведенного к статору. Поток, соз-
даваемый обмотками, зависит от величины и частоты питающего напряжения
0
1
ω
к
U
Ф =
(3.10)
Ток ротора I
2
равен
2
2
2
Z
sE
I
н
= (3.11)
где Z
2
- полное сопротивление фазы обмотки ротора.
Следует учитывать, что индуктивное сопротивление обмотки ротора х
2
является величиной переменной, зависящей от частоты тока ротора, а, следова-
тельно, от скольжения
21222
22 SLfLfх
⋅
=
=
π
π
При неподвижном роторе при s = 1 индуктивное сопротивление обмот-
ки ротора наибольшее. По мере роста скорости (уменьшении скольжения) ин-
дуктивное сопротивление ротора х
2
уменьшается и при достижении номиналь-
ной скорости составляет всего 1-3% от величины сопротивления при s = l. Обо-
значив
номs
хх
212
=
=
, получим
Sхх
ном22
=
(3.12)
Тогда
2
2
2
2
2
2
)( rSx
SE
I
н
н
+
=
(3.13)
Активная составляющая тока ротора
2
2
2
2
22
222
)(
cos
rSx
SrE
II
н
н
a
+
=⋅=
ϕ
(3.14)
где
2
2
2
2
2
2
)(
cos
rSx
r
н
+
=
ϕ
(3.15)
Приведем параметры цепи ротора к обмотке статора с учетом коэффи-
циента трансформации к
Т
= U
1
/Е
2н
. Приведение параметров производится на
основе сохранения равенства мощности.
Т
кEЕ
2
'
2
= ;
Т
к
I
I
2
'
2
= ;
2
2
'
2
τ
rr = ;
2
2
'
2
τ
хх = (3.16)
С учетом (3.16)
2'
2
2'
2
'
2
'
2
)( rSx
SE
I
н
н
+
=
и
2'
2
2'
2
'
2
'
2
'
2
)( rSx
SrE
I
н
н
a
+
=
(3.17)
Разделив числитель и знаменатель формулы (3.17) на s, получим
2
'
2
2'
2
'
2
'
2
)()(
S
r
x
E
I
н
н
+
=
(3.18)
Проведенная математическая операция - деление числителя и знамена-
теля на s, конечно, не изменяет справедливость равенства (3.18), но носит фор-
мальный характер, что нужно учитывать при рассмотрении этого соотношения.
В действительности, как это следует из исходной формулы (3.13), от скольже-
ния зависит величина индуктивного сопротивления ротора х
2
, а активное со-
противление r
2
остается постоянным. Использование выражения (3.18) позво-
ляет по аналогии с трансформатором составить схему замещения асинхронного
двигателя, которая представлена на рис.3.4,а.

Для анализа нерегулируемого
электропривода эту схему можно
упростить, перенеся контур
намагничивания на зажимы двигателя.
Упрощенная П-образная схема
замещения представлена на рис. 3.4,6.
Исходя из этой схемы, ток ротора бу-
дет равен:
2
'
2
1
2
1
'
2
)(
S
r
rx
U
I
к
++
=
(3.19)
где:
'
21 нк
ххх += - индуктивное сопротивление короткого замыкания.
Активная составляющая тока ротора будет:
2
'
2
1
2
'
2
1
'
2
)(
S
r
rx
S
r
U
I
к
a
++
=
(3.20)
Подставляя (3.10) и (3.20) в (3.4), получим выражение для момента
асинхронного двигателя
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++
=
2
'
2
1
2
0
'
2
2
1
3
S
r
rx
S
r
U
M
к
ω
(3.21)
Это выражение ото-
бражает механическую ха-
рактеристику асинхронного двигателя
)(MfS
=
.
Характеристика асинхронного
двигателя с фазным ротором, обмотки
которого замкнуты накоротко, пред-
ставлена на рис. 3.5. Здесь же пред-
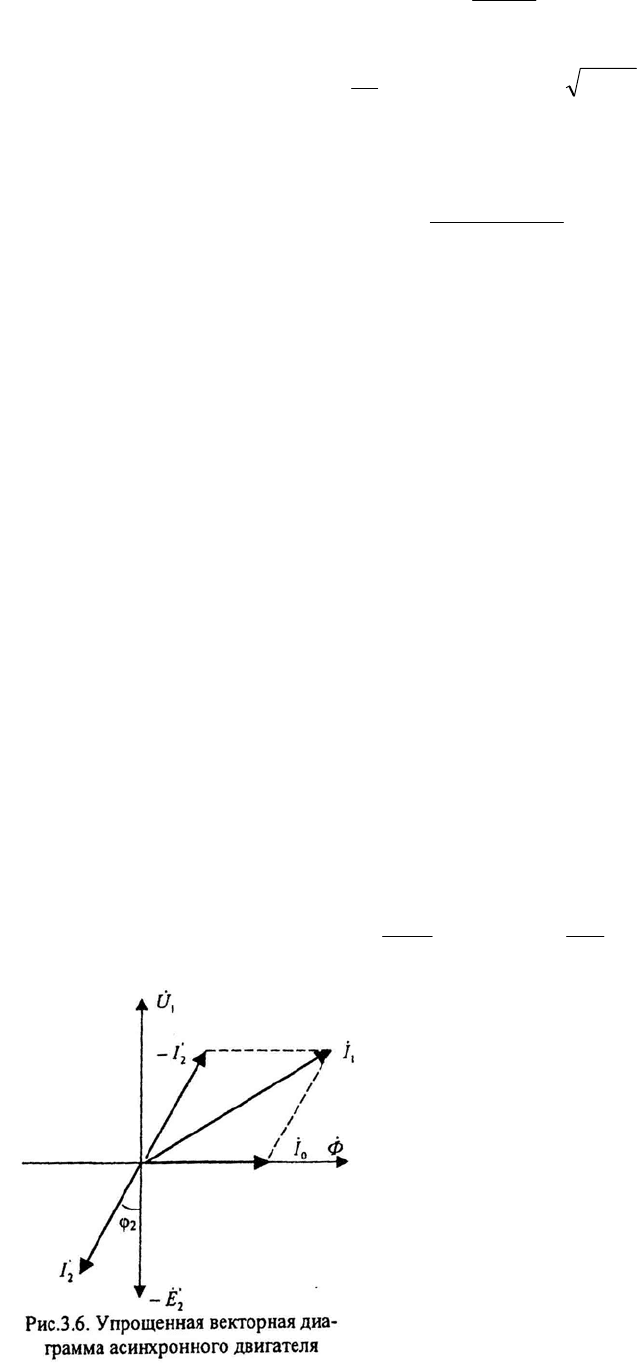
ставлена электромеханическая характеристика двигателя )(
1
IfS = , опреде-
ляемая из векторной диаграммы асинхронного двигателя рис.3.6,
'
2
.
0
.
1
.
III += .
Полагая ток намагничивания реактивным, получим
2
'
20
2'
2
2
0
2
2
'
2
2
2
'
201
sin2)cos()sin(
ϕϕϕ
IIIIIIII ⋅++=++= (3.22)
где:
2
2
'
2
1
2
sin
к
к
x
S
r
r
x
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
ϕ
(3.23)
Приравняв производную dM/ds = 0, найдем максимальное значение мо-
мента асинхронного двигателя М
к
и соответствующее ему значение критиче-
ского скольжения S
к
(
)
22
110
2
1
2
3
к
к
xrr
U
М
+±
=
ω
(3.24)
Отношение максимального момента к номинальному называется пере-
грузочной способностью асинхронного двигателя
н
к
М
М
=
λ
(3.25)
22
1
2
к
к
xr
r
S
+
±=
(3.26)
где: S
к
— критическое скольжение; знак (+) означает, что эта величина
относится к двигательному режиму, знак (-) - к генераторному режиму рекупе-
ративного торможения.
С учетом (3.24) и (3.25) формулу механической характеристики (3.21)
можно преобразовать к более удобному для пользования выражению - формуле
Клосса.
ккк
кк
aSSSSS
aSM
М
2//
)1(2
++
+
=
(3.27)
где:
'
21
/ rra =
Для двигателей мощностью более 15кВт сопротивление r
1
невелико и
при частоте 50Гц значительно меньше х
к
. Поэтому в приведенных выше выра-
жениях величиной r
1
, можно пренебречь. Тогда
к
к
x
U
M
0
2
1
2
3
ω
= (3.28)
к
x
r
'
2
к
S = или )1(
2
−+=
λλ
нк
SS (3.29)
Формула Клосса, если пренебречь r
1
, будет иметь вид:
кк
к
SSSS
M
М
//
2
+
=
(3.30)
По формулам (3.29) и (3.30) можно рассчитать механическую характе-
ристику асинхронного двигателя, пользуясь его паспортными данными, зная
номинальный момент М
н
, номинальное скольжение S
н
и перегрузочную спо-
собность двигателя λ.
Проанализируем особенности механической характеристики асинхрон-
ного двигателя (см. рис.3.5). Она носит нелинейный характер и состоит из двух
частей. Первая - рабочая часть - в пределах скольжения от 0 до S
к
. Эта часть
характеристики близка к линейной и имеет отрицательную жесткость. Здесь
момент, развиваемый двигателем, примерно пропорционален току статора I
1
и
ротора I
2
. Так как на этой части характеристики S<S
к
, то второе слагаемое зна-
менателя в формуле (3.30) существенно меньше первого, и им можно пренеб-
речь. Тогда рабочую часть механической характеристики можно приближенно
представить в линейной форме, где момент пропорционален скольжению.
S
S
М
М
к
к
2
=
или S
S
М
М
н
н
= (3.31)
Вторая часть механической
характеристики асинхронного двигателя при
скольжениях, больших S
к
(S<S
к
)
криволинейная, с положительным значением
жесткости β, Несмотря на то, что ток двигателя
по мере роста скольжения увеличивается,
момент, напротив, уменьшается. Если обмотки
ротора асинхронного двигателя с фазным
ротором во внешней цепи замкнуты накоротко, то пусковой ток такого двига-
теля (при ω = 0 и s=l) будет очень большим и превысит номинальный в 10-12
раз. В то же время пусковой момент составит порядка 0,4-0,5 номинального.
Как будет показано в следующем параграфе, для короткозамкнутых двигателей
пусковой ток будет (5,5-7,0)I
н
, а пусковой момент (0,9-1,3)М
н
.
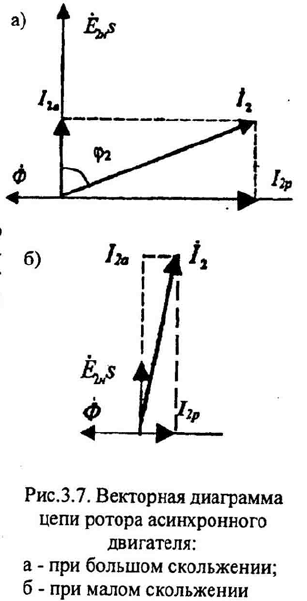
Для объяснения такого несоответствия между величинами пускового
тока и момента рассмотрим векторные диаграммы цепи ротора (рис.3.7) для
двух случаев: а) когда скольжение велико (пусковая часть характеристики); б)
когда скольжение мало (рабочая часть характеристики). При пуске, когда s=1,
частота тока ротора равна частоте питающей сети (f
2
=50Гц). Индуктивное со-
противление обмотки ротора (см.3.12) велико и существенно превосходит ак-
тивное сопротивление ротора r
2
, ток отстает от э.д.с. ротора на большой угол
φ
2
, т.е. ток ротора, в основном, реактивный. Поскольку э.д.с. ротора в этом слу-
чае будет велика E
2S=1
= E
2н
, то и пусковой ток будет очень большим, однако из-
за малого значения cos φ
2
активная составляющая
тока ротора I
2а
будет невелика, а, следовательно,
момент, развиваемый двигателем, будет также неве-
лик.
При разгоне двигателя скольжение
уменьшается, э.д.с. ротора, частота тока ротора, ин-
дуктивное сопротивление ротора пропорционально
уменьшаются. Соответственно уменьшается
величина полного тока ротора и статора, однако,
вследствие повышения cos φ
2
активная состав-
ляющая тока ротора растет и возрастает момент
двигателя.
Когда скольжение двигателя станет меньше
S
к
то частота тока ротора уменьшится настолько, что
индуктивное сопротивление станет уже меньше активного, и ток ротора будет
практически активным (см.рис.3.7,6), момент двигателя будет пропорционален
току ротора. Так, если номинальное скольжение двигателя S
н
=2%, то по срав-
нению с пусковыми параметрами частота тока ротора уменьшится в 50 раз, со-
ответственно уменьшится индуктивное сопротивление ротора. Поэтому, не-
смотря на то, что э.д.с. ротора также уменьшится в 50 раз, она будет достаточна
для создания номинального тока ротора, обеспечивающего номинальный мо-
мент двигателя. Таким образом, своеобразие механической характеристики
асинхронного двигателя определяется
зависимостью индуктивного сопротив-
ления ротора от скольжения.
3.2.3. Пуск асинхронного двигателя с фазным ротором
Исходя из изложенного, для пуска асинхронного двигателя с фазным
ротором нужно принять меры для увеличения пускового момента и снижения
пусковых токов. С этой целью в цепь ротора включают добавочное активное
сопротивление. Как следует из формул (3.24, 3.26), введение
добавочного ак-
тивного сопротивления не изменяет максимального момента двигателя, а лишь
изменяет величину критического скольжения
к
д
x
Rr
'
2
'
2
к
S
+
= (3.32)
где
'
2д
R
- приведенное к статору добавочное сопротивление в цепи рото-
ра.
Введение добавочного активного сопротивления увеличивает полное
сопротивление роторной цепи, в результате чего уменьшается пусковой ток и
увеличивается cos φ
2
роторной цепи,
вследствие чего увели-
чивается активная
составляющая тока ро-
тора и, следовательно,
пусковой момент
двигателя.
Обычно в ро-
роторную цепь двигателя с фазным ротором вводят секционированное сопро-
тивление, ступени которого перемыкаются пусковыми контакторами. Расчет
реостатных пусковых характеристик можно производить по формуле (3.30),
используя значение S
к
, соответствующее величине R
2доб
для каждой ступени
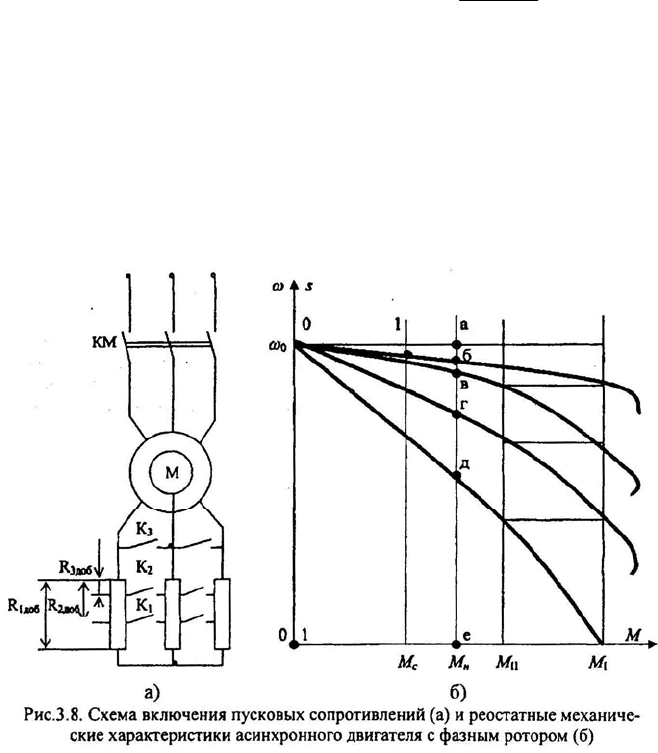
пускового сопротивления. Схема включения дополнительных сопротивлений и
соответствующие реостатные механические характеристики двигателя показа-
ны на рис.3,8. Механические характеристики имеют общую точку идеального
холостого хода, равную скорости вращения электромагнитного поля статора
ω
0
, а жесткость рабочей части характеристик уменьшается по мере возрастания
суммарного активного сопротивления роторной цепи (r
2
+ R
доб
).
При пуске двигателя сначала вводится полное добавочное сопротивле-
ние R
1доб
. По достижении скорости, при которой момент двигателя M
II
стано-
вится близким к моменту сопротивления М
с
, часть пускового сопротивления
шунтируется контактором К
1
, и двигатель переходит на характеристику, соот-
ветствующую величине добавочного сопротивления R
2доб
. При этом момент
двигателя увеличивается до значения M
I
. По мере дальнейшего разгона двига-
теля контактором К
2
закорачивается вторая ступень пускового сопротивления.
После замыкания контактов контактора К
3
двигатель переходит на естествен-
ную характеристику и будет работать со скоростью, соответствующей точке 1.
Величины добавочных сопротивлений легко определить графически.
Проведем линию номинального момента двигателя и отметим точки пересече-
ния этой линии с механическими характеристиками. Тогда отрезки, заключен-
ные между точками, будут пропорциональны величинам сопротивления ступе-
ней.
Полное добавочное сопротивление R
1доб
= R
2н
(бд/ае).
Первая ступень сопротивления R
1доб
– R
2доб
= R
2н
(гд/ае).
Вторая ступень сопротивления R
2доб
– R
3доб
= R
2н
(вг/ае).
Третья ступень сопротивления R
3доб
= R
2н
(бв/ае).
Отрезок аб пропорционален сопротивлению обмотки фазы ротора r
2
=
R
2н
(аб/ае).

В приведенных соотношениях R
2н
- номинальное сопротивление ротора,
которое определяется по формуле:
н
линн
н
I
Е
R
2
.2
2
3 ⋅
=
где: Е
2н.лин
- линейная э.д.с. ротора при s=1;
I
2н
- номинальный ток ротора.
Задача 3.1. Рассчитать естественную механическую характеристику
асинхронного двигателя с фазным ротором типа МТН611-6 краново-
металлургической серии и построить пусковые характеристики при реостатном
пуске в 3 ступени. Определить величины пусковых сопротивлений.
Основные данные двигателя:
Номинальная мощность при работе в длительном режиме -75 кВт, но-
минальная скорость вращения n
ном
= 950 об/мин, напряжение статора U
1
,=380
В, номинальное напряжение на кольцах ротора Е
2н.лин
=270 В, максимальный
момент двигателя М
к
=2610 Нм, номинальный ток ротора I
2н
=108 А. Момент
сопротивления на валу двигателя при пуске принять равным номинальному мо-
менту двигателя.
Номинальтный момент двигателя
Нм
Р
М
н
н
н
754
4,99
75000
===
ω
где
4,99
60
2
==
н
н
n
π
ω
1/с
Перегрузочная способность двигателя
46,3
754
2610
===
н
к
М
М
λ
Номинальное скольжение
05,0
1000
9501000
0
0
0
0
=
−
=
−
=
−
=
ω
ω
ω
нн
н
n
nn
S
Критическое скольжение на естественной характеристике
33,0146,346,3(05,0)1(
22
=−+=−+=
λλ
нк
SS
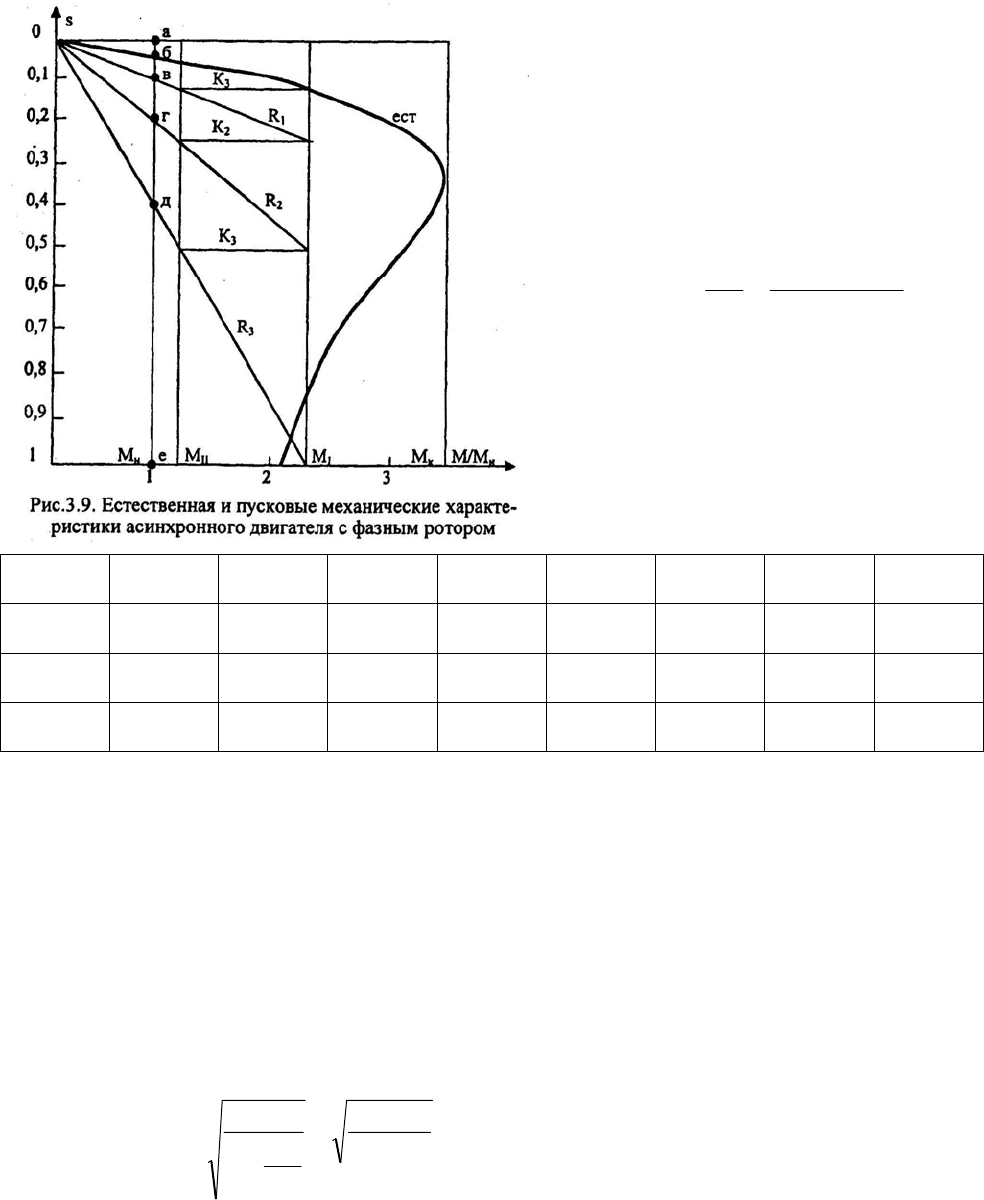
Расчет естественной
характеристики производим по
формуле
ккн
SSSSМ
М
//
2
+
=
λ
S 1 0,8 0,6 0,4 0,33 0,2 0,1 0,05
S/S
к
3,0 2,42 1,81 1,21 1 0,6 0,3 0,15
S
к
/S 0,33 0,41 0,55 0,82 1 1,65 3,3 6,6
М/М
н
2,07 2,44 2,93 3,4 3,46 3,21 1,92 1
Построенная по расчетным данным естественная механическая харак-
теристика представлена на рис.3.9.
Для расчета пусковых характеристик нужно задаться значениями мо-
мента М
п
, при котором происходит переключение ступеней пускового реостата
М
п
=1,2М
н
о.е.
Пусковые значения момента М
I
(см. рис. 3.9) находятся по формуле
III
MМ
'
λ
= ,
где
2
2,105,0
11
4
1
'
'
=
⋅
=
⋅
=
+m
н
н
M
M
S
λ
здесь m - число ступеней
M
I
=2·1,2=2,4 о.е. M
I
<М
к
.
Построение пусковых механических характеристик произведем, пола-
гая, что при моментах от 0 до M
I
=2,4 о.е., т.е. на рабочем участке характери-
стик, они носят прямолинейный характер. Первую пусковую характеристику,
соответствующую полностью включенному в цепь ротора пусковому сопро-
тивлению строим, соединяя точки с координатами (S=0, М=0) и (s=1, M= M
I
).