Назаров А.С. (ред.) Конструирование радиоэлектронных средств
Подождите немного. Документ загружается.


D = 6,65
-6
дм
3
·Па/с (5,5-10
-5
дм
3
· мкм рт.ст/с);
в менее ответственных случаях полная вакуумная герметизация не
обеспечивается, степень герметичности может быть уменьшена до
1,33·10
-4
дм
3
• Па/с (10
-3
дм
3
-мкм рт.ст/с).
К относительным показателям относятся коэффициенты дезинтег-
рации объема и массы, показатель функционального разукрупнения,
величина перегрузки конструкции при вибрациях и ударах, а также
многие параметры технологичности конструкции, такие как коэффи-
циенты унификации и стандартизации, коэффициент повторяемости
материалов и изделий электронной техники, коэффициент автоматиза-
ции и механизации и др.
В конструкциях РЭС разного уровня компоновки при корпусирова-
нии ИС, компоновке их в ячейки и далее в блоки и стойки происходит
потеря полезных объемов, а следовательно, и масс. Величина этих яо-
терь может быть весьма значительна. Оценка потерь (дезинтеграции)
объемов и масс проводится с помощью коэффициентов дезинтеграции
q
v
и q
m
соответственно, определяемых как отношение суммарного
объема (массы) конструктива к его полезному объему (массе):
q
v
=V/V
N
, q
m
=m/m
N
, (1.4)
где V
N
= Σ V
СЭ
, m
N
= Σ m
СЭ
— полезные объем и масса схемных
элементов.
Коэффициенты дезинтеграции объема (или массы) q V
(m)
показы-
вают, во сколько раз увеличивается суммарный объем (или масса)
комплектующих изделий при переходе с одного уровня компоновки
на более высокий. Например, при переходе от нулевого уровня (кор-
пусированных микросхем) к первому (функциональной ячейке) име-
ем q
v(m)
= V(m)
фя
/Σ V(m)
ис
, при переходе от ячейки к блоку
q
v(m)
= V(m)
б
/ Σ V(m)
ФЯ
и т.д., где V(m)
ис
,V(m)
ФЯ
,V(m)
б
—
соответственно объемы (или массы) микросхемы, ячейки, блока.
Коэффициенты дезинтеграции, как и плотность упаковки, реально
отражают качество конструкции, в частности ее компактность, но и они
не могут быть использованы для сравнения конструктивов, относящих-
ся к разным поколениям, разным уровням конструктивной иерархии,
или РЭС различного назначения и принципа действия.
Анализ существующих наиболее типовых конструктивов разных по-
колений и различного назначения позволил получить средние значе-
22
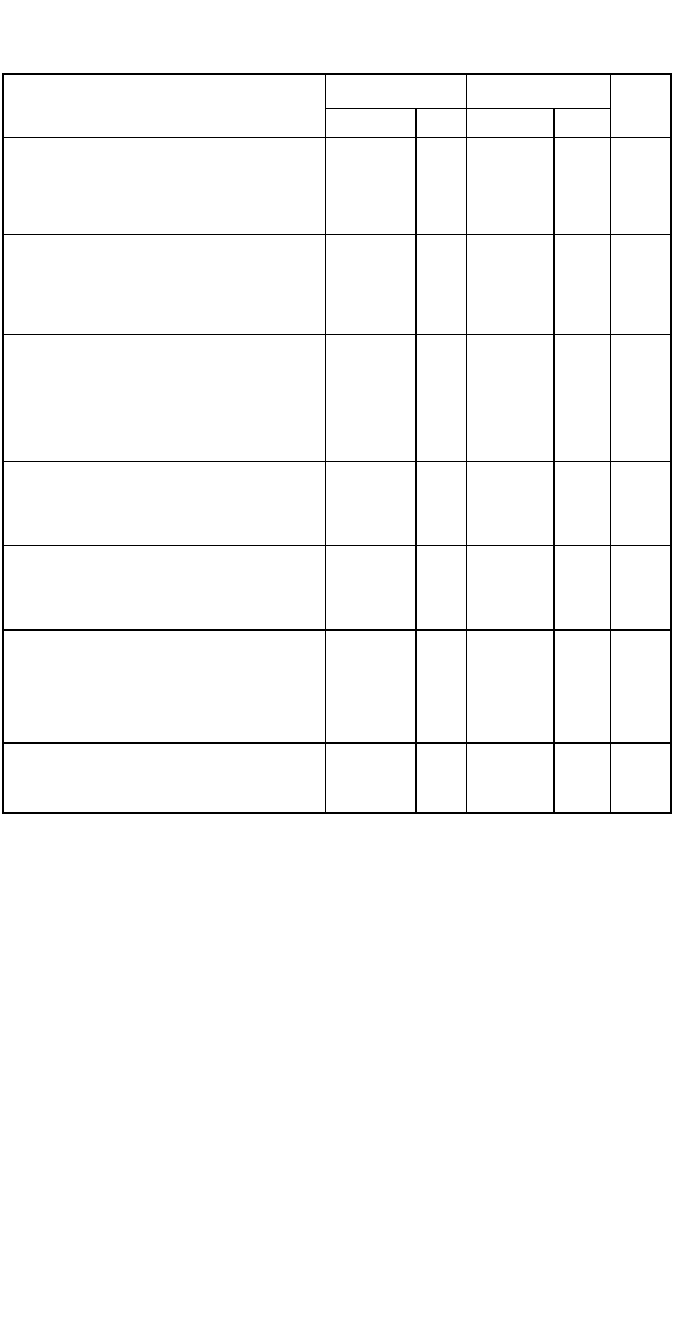
ния их коэффициентов дезинтеграции объема и массы (табл. 1.1). В
таблице приведены и значения удельной массы конструктивов.
Таблица 1.1
q
V
q
m
Вариант конструктива
КТЕ*
-
ФЯ
ФЯ
-
Б
КТЕ*
-
ФЯ
ФЯ
-
Б
m ',
г/см
3
Блок разъемной конструкции
из ФЯ
на печатных платах с ИС в
корпусах II
типа (цифровой)
10,2 1,8 4,7 1,5 0,5
Блок книжной конструкции
из ФЯ
на печатных платах с ИС в
корпусах IV
типа (цифровой)
6,4 1,8 3,2 1,3 0,52
Блок книжной конструкции из
ФЯ
на бескорпусных МСБ
(цифровой) при:
односторонней компоновке;
двухсторонней компоновке
11
5,6
1,9
1,9
7,7
4,8
3,0
3,0
1,07
1,2
Субблок пенальной
конструкции
на корпусированных ИС
(аналоговый)
10,5 — 6,6 — 0,6
Субблок пенальной
конструкции
на бескорпусных МСБ
(аналоговый)
17,4 — -
11,5 — 1,6
Модуль СВЧ на
микрополосковых МСБ
при:
односторонней компоновке;
двухсторонней компоновке
6,7
5,6
—
14,0
8,5
—
0,92
0,97
Субблок из бескорпусных
МСБ
с теплоотводом (силовой)
9,4 — 1,5 — 1,3
* КТЕ — конструктивно-технологическая единица: для РЭСIII
поколения — корпусированная ИС, для РЭС IV поколения —
бескорпусная МСБ
Показатель функционального разукрупнения (ПФР) конструкции
представляет собой отношение количества элементов N в
конструктиве к количеству выводов М из него: ПФР = N / М.
Например, для цифровой бескорпусной МСБ, содержащей 12
бескорпусных ИС с 40 элементами в каждом кристалле
(N=40•12=480 элементов) и 16 выходными контактными
площадками ПФР= 480/ 16 = 30. Чем выше ПФР, темближе
конструкция к конструктиву высокой интеграции, тем меньше
монтажных соединений, тем выше надежность и меньше масса и
габариты. Наибольшее число функций и элементов монтажа содержат
БИС и СБИС. Однако и у них есть предел степени интеграции,
определяемый количеством допустимых выводов от активной
площади кристалла к периферийным контактным площадкам (разд.
1.4).
23

Наконец, перегрузка п действующих на конструкцию вибраций или
ударов определяется как отношение возникающего от их действия ус-
корения масс элементов конструкции к ускорению свободного падения:
п = a/g , где а — ускорение при вибрации (или ударе). Вибро- и
ударопрочность конструкции определяются допустимыми
перегрузками при вибрациях и ударах, которые может выдержать
конструкция без разрушения связей между элементами. Для того
чтобы эти свойства были обеспечены, необходимо, чтобы реально
возникающие в тех или иных условиях эксплуатации перегрузки не
превышали предельно допустимые для конкретной конструкции.
1.2. Системный подход к конструированию РЭС
В общем смысле «система — нечто целое, представляющее собой
единство закономерно расположенных и находящихся во взаимной свя-
зи частей» [1]. При создании той или иной системы
(информационной, энергетической, организационной, общественно'й,
образования и др.) необходимо руководствоваться двумя основными
правилами:
1) выявлять и устанавливать взаимные связи субъектов системы и
среды во всей их совокупности, т.е. как внутренние (между субъекта-
ми), так и внешние (между ними и средой существования);
2) вырабатывать требования на связи, качество и объем функций
подсистем (субъектов) таким образом, чтобы они улучшали качество и
функционирование системы в целом. В противном случае «получить
оптимальную систему из всех оптимальных подсистем невозможно»,
т.е. нужны компромиссы в выборе решений.
Метод оптимального решения задачи проектирования систем, осно-
ванный на всестороннем целостном рассмотрении системы и ее измене-
нии в процессе взаимодействия со средой, называется системным под-
ходом. Каждый субъект системы является частью системы высшего
ранга («большой системы»), но в то же время он может быть и большой
системой для подсистем низшего ранга, т.е. существует системная
иерархия. Кроме того, на разработку каждого субъекта системы зада-
ются требования, определяемые требованиями системы высшего ранга,
а требования на сам субъект определяют требования на разработку под-
систем низшего ранга. Эти требования в общем случае представляют
собой группу данных Д , состоящую из определенных подгрупп. Приме-
нительно к РЭС покажем это на примере бортовых РЭС IV поколения
самолета. На рис. 1.1 показана системная иерархия самолета [2]. Здесь
уровни иерархии и их звенья (субъекты) разбиты по функциональной
значимости решаемых задач, обеспечивающих выполнение основной
целевой функции самолета и основных функций подсистем низшего
24
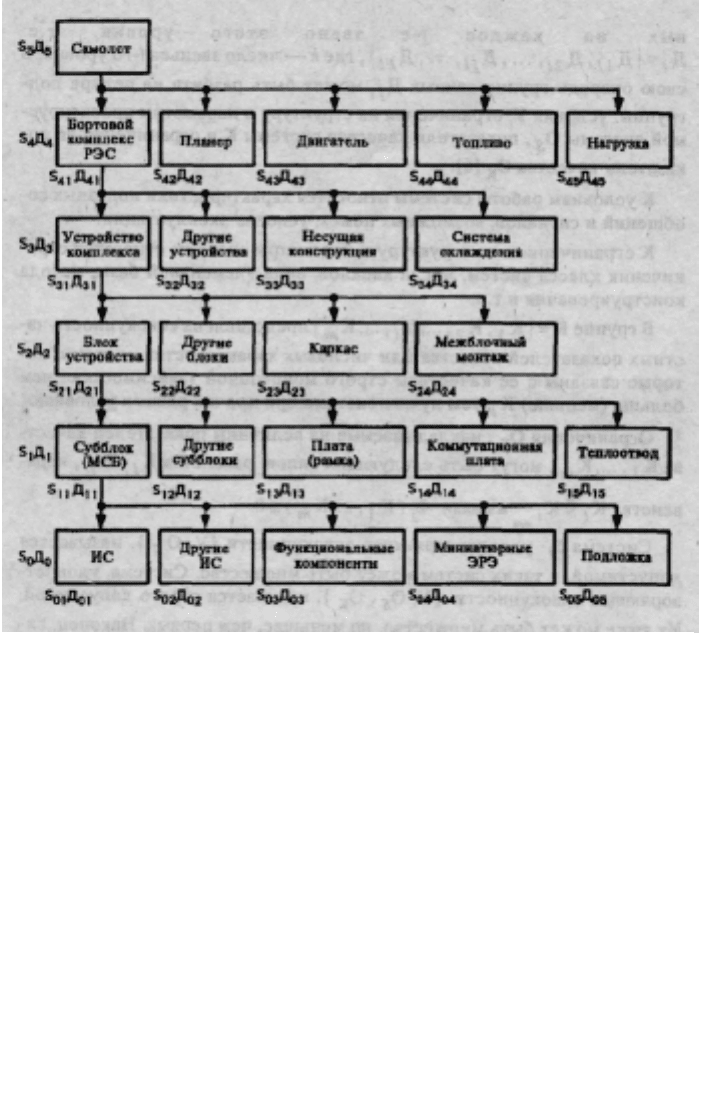
Рис. 1.1. Системная иерархия самолета
ранга. Каждый уровень иерархиии имеет свое обозначение S
l
, и
группу данных Д
J
, где l= 0,1,2,3,... — уровень иерархии, начиная с
нулевого,соответствующего элементной базе РЭС. Следует
отметить, что уровни представленной системы не являются
уровнями иерархии РЭС по функциональной или конструктивной
сложности, так как они отражают не столько конструкции (которые
могут быть выполнены разновариантными), сколько те задачи (во
многом совпадающие с делением по функциональной сложности),
которые должен выполнять каждый субъект системы. Например,
планер надо рассматривать не как конструкцию моноплана с
двигателями, а как устройство, обеспечивающее полет в атмосфере
и несущее основание всех остальных частей самолета. Группа
данных l-ro уровня иерархии состоит из совокупности дан-
25

ных на каждое j-e звено этого уровня, т.е.
Д
l
= {Д
1l
. Д
2l
,.....Д
jl
,,..., Д
kl
}, где k— число звеньев 1-го уровня. В
свою очередь группа данных Д
jl
может быть разбита на четыре под-
группы: условия У, ограничения на структуру и параметры
проектируемой системы О
S
, показатели качества системы К и
ограничения на показатели качества О
к
[6].
К условиям работы системы относятся характеристики полезных
сообщений и сигналов, возможных помех, условия эксплуатации.
К ограничениям на структуру и параметры системы относятся
ограничения класса систем, числа каналов, вида элементной базы,
метода конструирования и т.п.
В группе К = {К
1
,К
2
, ...,К,., ...,К
m
} представлена совокупность
частных показателей качества или числовых характеристик
системы, которые связаны с ее качеством строго монотонной
зависимостью: чем больше (меньше) К
i
, тем лучше система при
прочих равных условиях
Ограничения О
K
, накладываемые на величины показателей
качества К
1
,..., К
m
, могут быть следующих типов: равенства
К
i
= К
i0
, неравенства К<> К
i доп
. и связи Ф
i
, (К
1
,...',К
m
) ≤ 0.
'
Система S, удовлетворяющая совокупности {У, О
S
}, называется
допустимой, и таких систем может быть множество. Система,
удовлетворяющая совокупности {У, О
S
, О
K
}, называется строго
допустимой.
Их тоже может быть множество, но меньшее, чем первых. Наконец,
система, обладающая наилучшим (наименьшим или наибольшим)
значением вектора показателей качества К при всех остальных
требованиях,считается оптимальной. Для ее выбора необходимо
выбрать критерий оптимальности (или критерий предпочтения), т.е.
выбрать, какое значение вектора К (или представление его в
скалярной форме К
i
) считать лучшим.
Разработка системы данных на тот или иной субъект системы
разбивается на внешнее и внутреннее проектирования. Под внешним
проектированием понимают обоснование исходных данных на
субъект системы: условий работы субъекта, ограничений,
накладываемых на структуру, состав показателей качества,и
предъявляемых к ним требований. На этапе внутреннего
проектирования вначале определяют принципы построения
субъекта системы, его деление на подсистемы низшего
ранга, разрабатывают исходные данные на них, далее проводят
выбор элементной базы и синтез (оптимизацию по критерию
предпочтения)
26
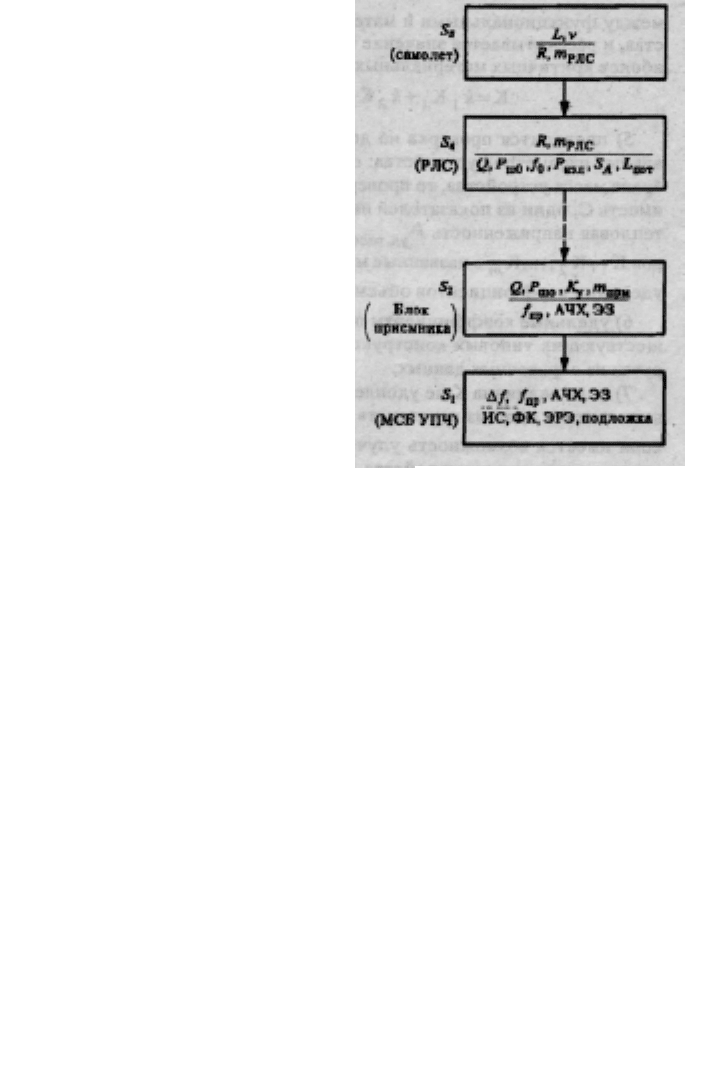
конструкции. Последовательное
решение этих задач на разных
уровнях (с верхнего до нижнего)
называется сквозным проектирова-
нием РЭС. На рис. 1.2 показан
пример сквозного проектирования
бортовой РЛС, построенной на
микросборках. Тактические данные
на самолет (L — дальность полета,
v — скорость самолета) опре-
деляют исходные данные на разра-
ботку РЛС (R — дальность обнару-
жения, m
РЛС
— масса РЛС). В
свою очередь, эти выходные дан-
ные определяют исходные данные
на МСБ приемно-усилительного
тракта (ПУТ) (Q — отношение
«сигнал/ шум», Р
Ш
— плотность
мощности шума приемника, К —
коэффициент усиления, m
пут
—
масса тракта и др.). Далее от внеш-
них данных переходят к внутрен-
ним (f
ПР
- промежуточная частота ПУТ,
∆f— его полоса пропускания,
АЧХ — амплитудно-частотная характеристика и ЭЗ — электрическая
принципиальная схема). На нулевом уровне выбирается по критерию
предпочтения элементная база (ИС, ЭРЭ), материал подложки и
проводится расчет топологии МСБ.
Может быть предложен следующий порядок оптимального проек-
тирования на уровне радиоустройства [7]:
1) совокупность исходных данных Д = { Д
1
,..., Д
l
} разделяется на
подгруппы: У = {У
1
!,...,У
k
.} , О
S
= {O
S1.....
О
Sr
} , K = {K
1
, ...,K
m
},
O
к
={O
k1………
O
kn
};
2) исходя из назначения устройства (данные подгруппы У)
составля-
ется его математическая модель в виде связывающей основные
энерго-
информационные характеристики функции F{K
1
, ...,K
m
}, которая в
случае затруднений может быть частично или полностью заменена
упорядоченной совокупностью показателей качества К;
3) составляется электрическая структурная'схема устройства;
4) для выбранной (или заданной) элементной базы и метода конст-
руирования определяются коэффициенты k, устанавливающие связь
с ним
27
Рис. 1.2. Примеро сквозного
проектирования бортовой РЛС
между функциональными и материальными характеристиками
устройства, и рассчитывается значение критерия предпочтения
(одного из наиболее критичных материальных параметров):
K = k
l
K
l
+k
2
K
2
+...+k
m
K
m
;
5) проводится проверка на допустимость значений других
материальных параметров устройства: если, например, в качестве К
была выбрана масса устройства, то проверке подлежат объем
устройства V, стоимость С, один из показателей надежности
(интенсивность отказов Λ ),тепловая напряженность Р
уд.расс.
;
пересчет функциональных параметров К
1
, К
2
,..., К
m
в названные
материальные производится с помощью удельных коэффициентов
объема k
V
, стоимости k
с
и т.д.;
6) удельные коэффициенты определяются расчетным путем для
существующих типовых конструкций аналогичного назначения
или берутся из справочных данных;
7) если величина К не удовлетворяет заданным требованиям или
не выполняется одно из неравенств V≤ V
ДОП
, С ≥ С
ДОП
, Λ ≥ Λ
ДОП
а
также если имеется возможность улучшения (минимизации) К, то
изменяют структурную схему устройства или значения
показателей качества в пределах ограничений O
S
и О
K
или же
пересматривают элементную базу с целью уменьшения
коэффициентов k
i
. для критичных функциональных параметров К
i
;
8) окончательное решение о правильности структурного
построения устройства принимают после проверки качества по
комплексному показателю (разд. 1.1).
Пример 1.2. Требуется провести оптимальное конструирование
приемопередающего устройства РЛС самолета.
1. Составление перечня исходных данных
Подгруппа данных У, определяющих назначение устройства и
воздействия внешней среды: назначение — авиационная техника
(самолет с дальностью полета L и скоростью v); тип устройства —
приемопередающее устройство РЛС для обнаружения целей по
скорости.
Подгруппа структурных ограничений O
S
: зондирующий сигнал
передатчика РЛС — непрерывный (или квазинепрерывный);
отраженный от цели сигнал — медленно флуктуирующий;
направление на цель известно; приемопередатчик должен частично
или полностью выполняться на микросборках; должна
рассматриваться возможность использования принципа
многоканальности.
28

Установлены и обоснованы следующие исходные
энергоинформационные данные: R — дальность обнаружения цели;
σ — эффективная поверхность рассеяния цели;f
0
— несущая частота
передатчика; f
ПР
— промежуточная частота приемника; Δ
V ц
—
пределы измерения радиальной скорости цели; Q — отношение
сигнал/шум; Р
Ш 0
— плотность мощности шума приемника; Т
ОБЗ
—
время обзора по скорости; L
пот
потери сигнала в
приемопередатчике; К
У
— коэффициент усиления напряжения в
приемнике; m
ПРМ
— масса приемника.
Показатели качества (подгруппа К) — функциональные
параметры:.Р
ИЗЛ
— мощность излучения передатчика, N — число
приемных каналов; материальные параметры: m
рлс
— масса
приемопередатчика; Λ его интенсивность отказов.Ограничения на
показатели качества (подгруппа О
к
):P=P
доп ,
m≤m
доп
,Λ ≤ Λ
доп
где первые части неравенств представляют собой допустимые
значения функциональных и материальных параметров. Будем
считать, что
P
доп
= 100 Вт, m
доп
=5 кг , Λ
доп
=10
-4
1/ч
2. Формирование математической модели приемопередатчика
На основании общего уравнения радиолокации устанавливаем
связь
между O
S
и К:
Q=PT
обз
24
2
4
0
λπ
σ
RP
LS
ш
потA
где S
A
— площадь поверхности антенны приемопередатчика; λ, —
дли-на волны.
При одноканальной структуре приемопередатчика ширина
полосы приемника
0
0
2
C
Vf
FF
Ц
ЦФ
∆
=∆=∆
π
где с
0
— скорость света; ΔF
Ц
— диапазон доплеровских частот, а
не-
обходимое время обзора составит T
ОБЗ
= 1/ΔF
Ц
= 1/ΔF
Ф
.
29
При многоканальной структуре приемопередатчика предусматрива-
ются N параллельно включенных приемных каналов с более узкими по-
лосами ΔF
Фк
Поэтому возможное время пребывания сигнала в каждом из каналов
(время наблюдения) T
наб
= 1/ΔF
фк
, время обзора Т
обз
= N Т
наб
=
Фк
F
N
∆
После введения (1.5) и решения уравнения модели относительно
показателей качества приемопередатчика окончательно получим
σ
λπ
24
2
0
4 R
LS
FP
QPN
ПОТA
Фкш
∆
=
По условиям задачи правая часть является постоянной величиной
PN=A = const.
В дальнейшем будем считать, что А = 100 Вт.
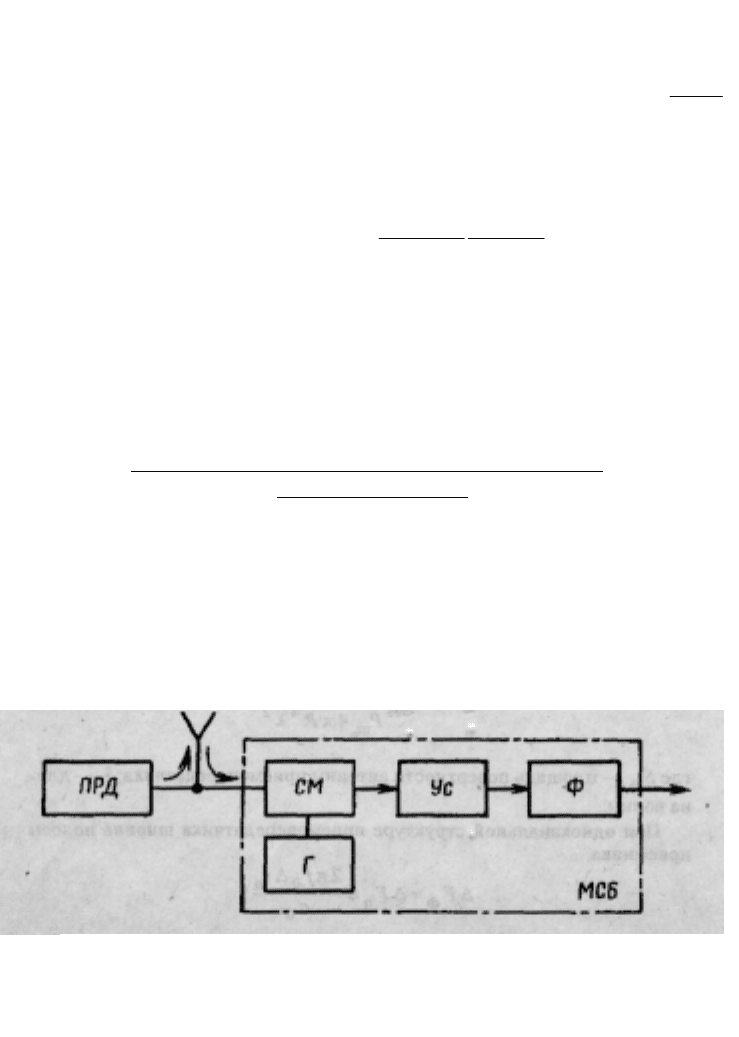
3. Составление электрической структурной схемы
приемопередатчика
В качестве первого варианта приемопередатчика рассмотрим
одноканальную структуру с поиском по частоте. Электрическая
структурная схема одноканального приемопередатчика приведена на
рис. 1.3.
Принимаем решение строить передатчик на основе
электровакуумных приборов (ЭВП), поскольку на
полупроводниковой элементной базе трудно получить требуемую
мощность передатчика.
Рис. 1.3. Электрическая структурная схема одноканального
приемопередатчика бортовой РЛС.
30
Приемный тракт приемопередатчика ПРД может быть
выполнен на элементной базе радиоаппаратуры IV поколения. В
качестве конструктива тракта выбираем микросборку (на схеме рис.
1.3 выделена пунктиром), состоящую из функциональных
элементов: смесителя СМ, гетеродина Г, усилителя Ус и
фильтра Ф.
Произведем оценку принятого решения, считая, что
критерием предпочтения является суммарная масса
приемопередатчика. Как показано в [7], для передатчиков на ЭВП
удельный коэффициент массы (с учетом вторичного источника
питания (ВИП) и коэффициента дезинтеграции) k p = 0,5 кг/Вт.
Функциональным параметром приемника будем считать
количество приемных каналов N
прм
При выполнении канала в виде
микросборки легко определить ее массу т
МСБ
= 0,05 кг и,
следовательно, удельный коэффициент массы приемника k
N
= 0,05
кг/канал.
Таким образом, суммарная масса одноканального
приемопередатчика может быть определена как
m
1
=k
p
P + k
N
N
npu
= 0,5•100+0,05•1 =50,05кг .
Поскольку m
доп
= 5 кг, требование к массе приемопередатчика при
принятом структурном построении не выполняется. Одновременно
не выполняется и требование к надежности. Интенсивность отказов
передатчика на ЭВП составляет 10
-4
1/ ч, приемника в виде МСБ 10
-6
1/ ч. Отсюда Λ
1
= 10
-4
+ 0,01•10
-4
=1,01•10
-4
>Λ
доп
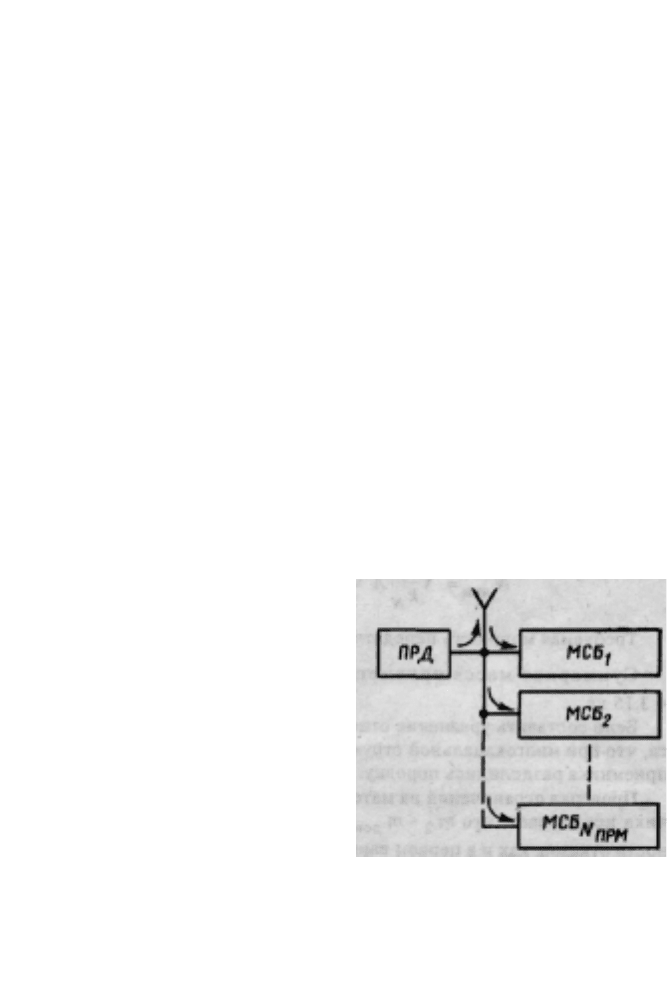
Поэтому рассмотрим второй ва-
риант структурной схемы (рис. 1.4) с
многоканальным приемником. Ис-
пользование многоканального при-
емника дает возможность за счет не-
значительного увеличения массы
приемной части существенно сни-
зить массу передатчика. Каждый
приемный канал выполняется в виде
микросборки и содержит гетеродин,
перестраиваемый в пределах
ΔF
ц
/N
прм
, смеситель, усилитель и
фильтр с полосой ΔF
Фк
. Как и
в первом варианте, для построения
передатчика используем ЭВП.
31
Рис. 1.4. Электричес
кая
структурная схема
приемопередатчика бортовой
РЛС с
многоканальным