Мюллер Юрген. Регулирование на основе SIMATIC
Подождите немного. Документ загружается.

7 Структуры регулирования
151
Управл. Объект
воздей- регулиро-
Регулятор постоянной ствие вания
величины
Функция
разделения Уставка
7.5 Регулирование с раздельными границами
С помощью регулирования с раздельными границами регулятор может обслуживать
параллельно или последовательно несколько исполнительных звеньев с различными
принципами действия и различными коэффициентами передачи. Разделение области
установки регулятора от верхнего до нижнего пределов выполняется с помощью одной или
нескольких функций разделения границ. При программном регулировании эти функции не
интегрированы в регулятор,
хотя в SIPART-регуляторах это частично реализовано.
Поскольку эти функции в различных отраслях должны удовлетворять очень различные
требования, то программное регулирование предлагает их как отдельную функцию, вход
которой просто подключается к управляющему воздействию регулятора. На рис. 7.11
приведны “только” две функции разделения границ, но может быть включено и больше
таких функций параллельно.
Рис. 7.11 Мнемосхема регулятора с разделенными границами
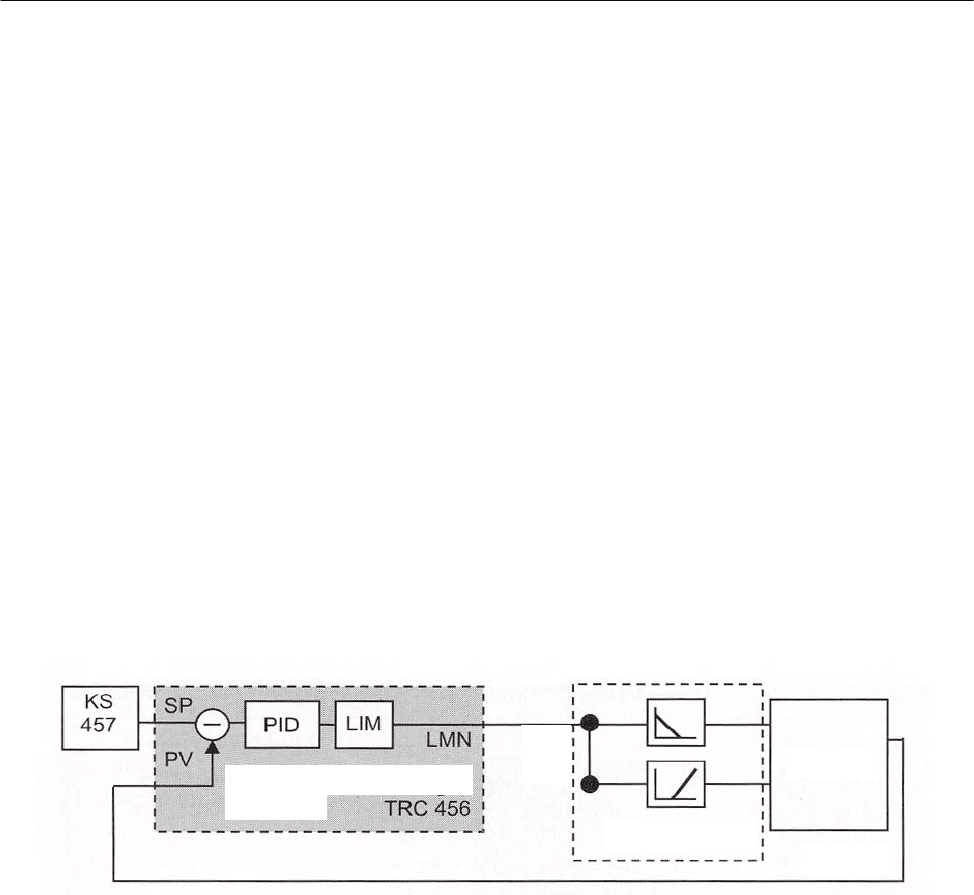
На рис. 7.12 температура в котле или в реакторе регулируется температурным регулятором
TRC456. При этом уставка задается диспетчером KS457. Температурные условия требуют
активного нагрева и активного охлаждения объекта. Для этого имеется нагревающий реагент
(+120°С) и охлаждающий реагент (+6°С). Регулятор в своей области регулирования 0…100%
должен быть разделен на два отдельных исполнительных звена
, действующих в
противоположные стороны, с различной динамикой и различным усилением. Ввод в
действие и наладка при такой постановке задачи будут рассмотрены подробнее в главе 9.
7 Структуры регулирования
152
Охлаждающий
реагент
Нагревающий
реагент
Уставка
Регулятор
постоянной величины
Вспомогательная
Главная регулируемая величина
регулируемая
величина 2-я часть 1-я часть Управляющее воздействие
участка участка
Рис. 7.12 Технологическая мнемосхема регулятора с раздельными границами при двух функциях разделения
7.6 Регулирование вспомогательных величин
Регулирование вспомогательных величин является способом, который основан на
применении измеряемых величин с частичных участков регулирования для улучшения
характеристики регулирования. С регулированием вспомогательных величин мы уже
познакомились при каскадном регулировании. Но существуют и другие виды схем, свободно
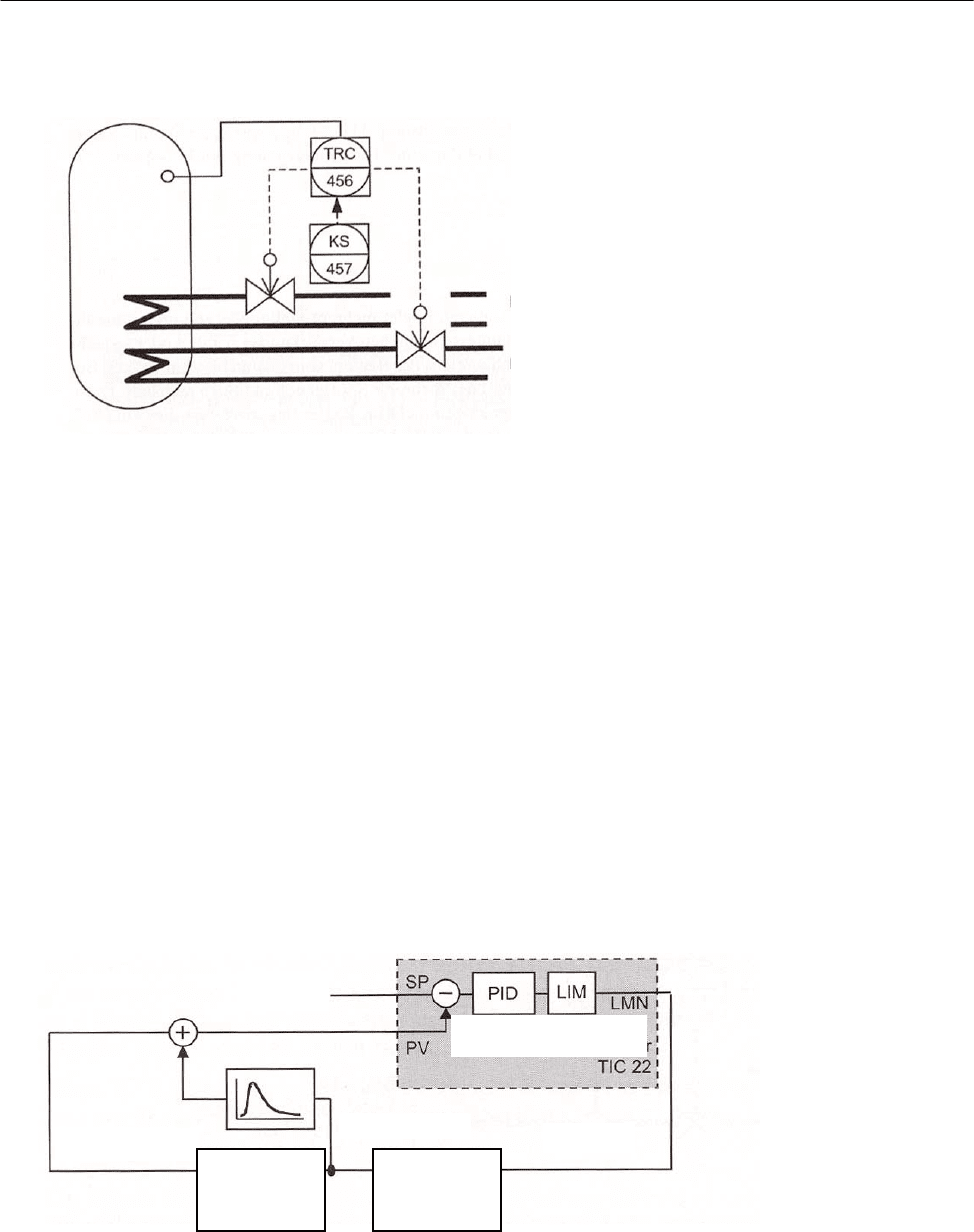
проектируемые пользователями. Здесь же приводим пример, как с помощью PI-регулятора
можно приближенно построить каскадный регулятор - см. рис. 7.13.
Рис. 7.13 Мнемосхема регулирования вспомогательной величины с предварительно подключенной
вспомогательной величиной

7 Структуры регулирования
153
С помощью модульных функциональных звеньев (например, D-звеньев и РТ1-звеньев)
может быть имитирован частичный участок (на рис. 7.13 частичный участок 2), чтобы
возмущения, действующие на этом отрезке объекта регулирования, быстрее подвести к
регулятору. Регулятор с таким включением может быть настроен точнее.
7.7 Переключаемое или избирательное регулирование
(override (блокирующее) - регулирование)
В противоположность регулированию с раздельными границами, при котором один
регулятор обслуживает несколько управляющих звеньев, избирательное регулирование
состоит из двух или более регуляторов, которые обслуживают только одно исполнительное
звено. Избирательное устройство или избирательное управление определяет, который из
участвующих регуляторов получает управление над этим исполнительным звеном. Термин
избирательный регулятор точнее было бы заменить на избирательную регулирующую
структуру. Во-первых, имеются различные виды избирательного регулирования, и во-
вторых, во всяком избирательном регулировании участвуют по меньшей мере два
регулятора. Примерами избирательного регулирования могут быть:
• выбор по минимуму,
• выбор по максимуму,
• программное переключение (например, при изменении рецептуры) и
• контакты реле.
Переключаемое регулирование применяется в процессах, в которых из-за состояния
установки или процесса проявляются совершенно различные характеристики объекта
регулирования и как следствие полностью другие требования к регулятору. Имеются
различные структуры переключаемого регулирования, которые иногда называются также как
избирательное регулирование, override-регулирование или также ограничительное
регулирование.
Действительное значение может воздействовать на два или больше регуляторов, а каждый
регулятор на одно, ему приданное исполнительное звено или – как показано на рис. 7.14 –
7 Структуры регулирования
154
два различных действительных значения воздействуют каждое на свой регулятор с
исполнительным звеном, которое по избирательной логике действует на оба участка
регулирования.
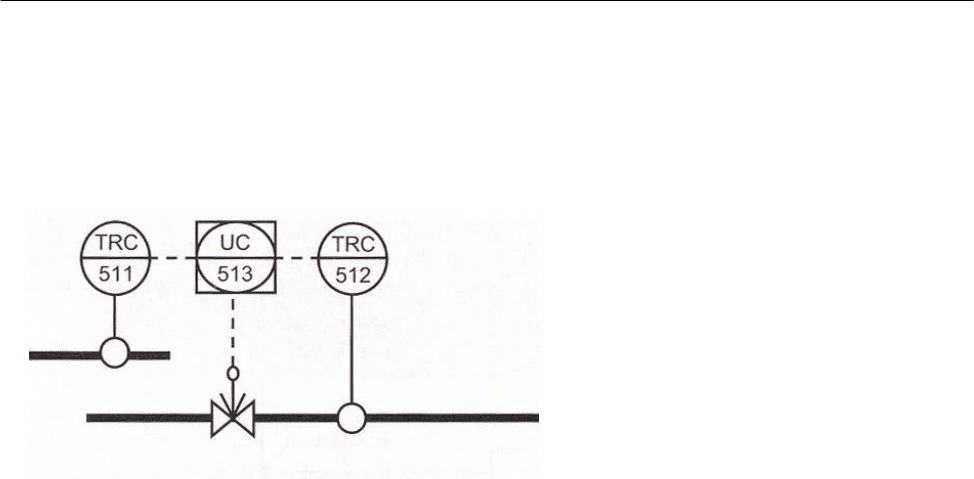
Рис. 7.14
Технологическая мнемосхема
избирательного регулирования
Решающим для переключаемого регулирования является то, что в каждый момент времени
на участке работает только один регулятор, а другой ждет подключения. В примере на рис.
7.14 управляющие воздействия обоих регуляторов TRC511 и TRC512 выбираются
селектирующим управлением UC513 (например, выбор по минимуму) и далее передаются на
исполнительное звено. Логика решает, которое из обоих значений следует использовать, и
передает выбранное значение на исполнительное звено.
В такой структуре резервный регулятор не должен оставаться предоставленным самому себе,
так как иначе он к моменту переключения из-за возможного насыщения интегратора
приведет к скачку управляющего воздействия и вызовет возмущение на участке
регулирования. Чтобы избежать насыщения интегратора резервного регулятора,
переключение выполняется с соответствующим отслеживанием управляющего воздействия
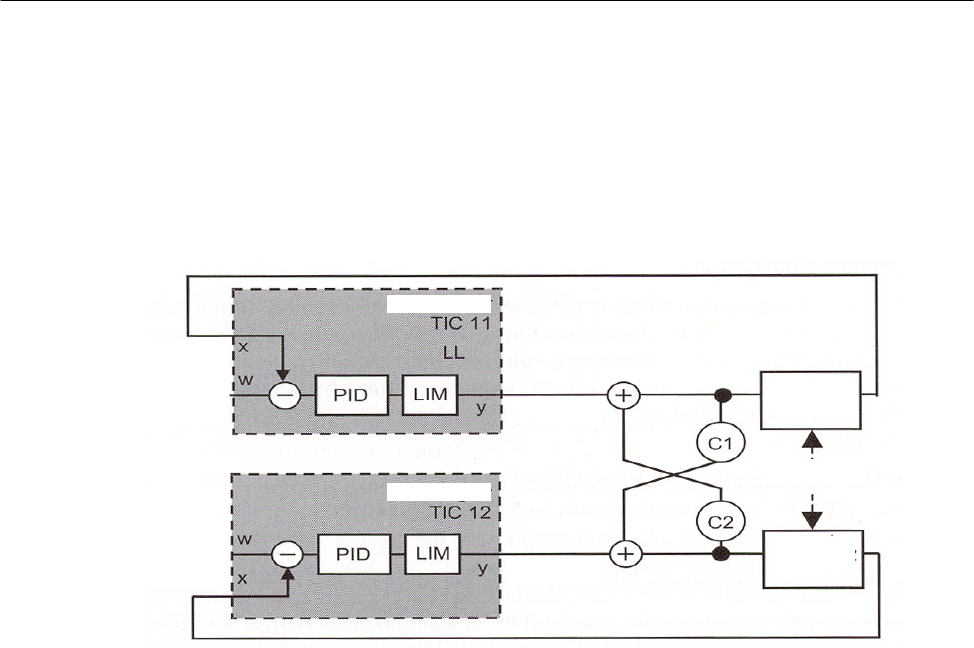
от работающего регулятора. Такое переключение или должно выполняться взаимно
(крестообразная схема ручного задания управляющего воздействия), или же оба регулятора
должны взаимно воздействовать на параметры ограничения управляющего воздействия
(LIM), как показано на рис. 7.15.
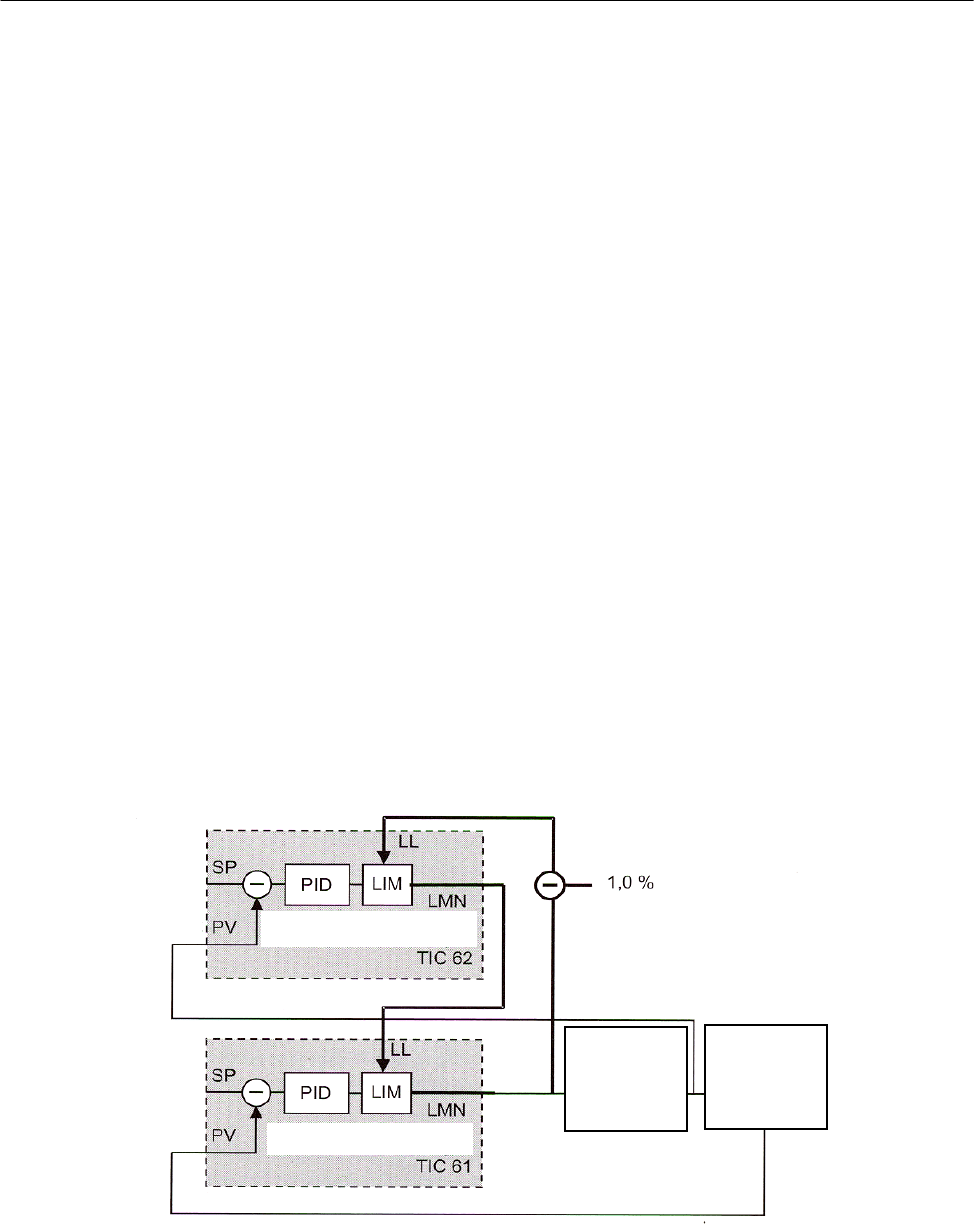
При работе без возмущений в том примере, что показан на рис.7.15, ограничительная уставка
находится
ниже, чем действительное значение на конце частичного участка 1. Регулятор
ограничения, который вполне разумно выполнен как простой I-регулятор, запирается и при
7 Структуры регулирования
155
Уставка
ограничения
Действительное Регулятор ограничения
значение
Частичный Частичный
Уставка участок участок
1 2
Действительное Основной регулятор Управляющее
значение воздействие
этом будет ограничен пониженным на 1% значением управляющего воздействия основного
регулятора. Это значение снова будет передано основному регулятору в качестве внутренней
границы по минимуму. Основной регулятор на это не прореагирует и сможет управлять
участком по необходимости в обоих направлениях. В случае, если питание на участке 1
отключится на некоторое время, то действительное значение (температура) на конце этого
участка упадет, регулирующая разность в регуляторе ограничения станет положительной, и
регулятор вследствие этого будет повышать нижнюю границу основного регулятора, пока не
будет достигнуто требуемое значение управляющего воздействия.
Таким образом, регулятор ограничения отключает основной регулятор и является
руководящим участником в установке выхода регулятора. В этом отключенном состоянии
управляющее воздействие основного регулятора принудительно повышается и дает больше
энергии в систему, что, естественно, влияет и на участок 2. Принудительно увеличенное
управляющее воздействие основного регулятора ведет к дальнейшему повышению
внутренней границы регулятора ограничения. Это взаимное возбуждение будет происходить
столь долго, пока регулирующая разность в регуляторе ограничения не станет
положительной. С подачей питания на участок 1 действительное значение на конце этого
Рис. 7.15 Мнемосхема ограничительного регулирования с ограничением минимального значения температуры
на конце частичного участка 1

7 Структуры регулирования
156
участка повысится и регулирующая разность регулятора ограничения станет отрицательной.
Таким образом он снизит свое управляющее воздействие и нижнее значение границы
основного регулятора. Тот вследствие большой отрицательной регулирующей разности
опять снизит свое управляющее воздействие, еще не вступившее в действие.
Падающее управляющее воздействие ведет снова к уменьшению значения минимальной
границы регулятора ограничения. Это происходит до тех пор, пока регулятор ограничения не
возвратит управление исполнительным звеном основному регулятору. На рис. 7.15
вследствие применения нижнего ограничения управляющего воздействия (“LL” для нижнего
предела) является это регулирование ограничения ограничением управляющего воздействия
по минимальному значению
1
(защита от замерзания, или регулятор замерзания). Если,
напротив, в обоих регуляторах будет использоваться верхнее ограничение управляющего
воздействия (“HL” для верхнего предела), то говорят об ограничении по максимальному
значению
1
(например, ограничение внешней температуры емкости для реакции).
Для реализации таких структур идеально подходят программные модули (блоки), так как они
предоставляют открытыми все степени свободы (например, могут быть легко выполнены
структурные изменения при вводе их в эксплуатацию программ, выполняемых с помощью
SIMATIC S7 CFC. Соответствующий пример Вы найдете в главе 10).
7.8 Регулирование множества величин
Во многих технических установках часто появляется проблема, регулировать несколько
параллельно работающих процессов, которые сильно влияют друг на друга за счет их
“внутренних связей”. Такие регулирующие процессы называют регулированием множества
величин. Из соображений наглядности мы ограничимся регулированием двух величин. На
практике случаются и значительно более сложные регулирования множества величин. Для
этих случаев используются не процессные регуляторы, а специальные пакеты программ,
которые обрабатываются на собственном вычислителе (или процессоре). Решающим факто-
1
Предполагая при этом одинаковые знаки при коэффициенте пропорциональности (GAIN) в обоих
регуляторах.
7 Структуры регулирования
157
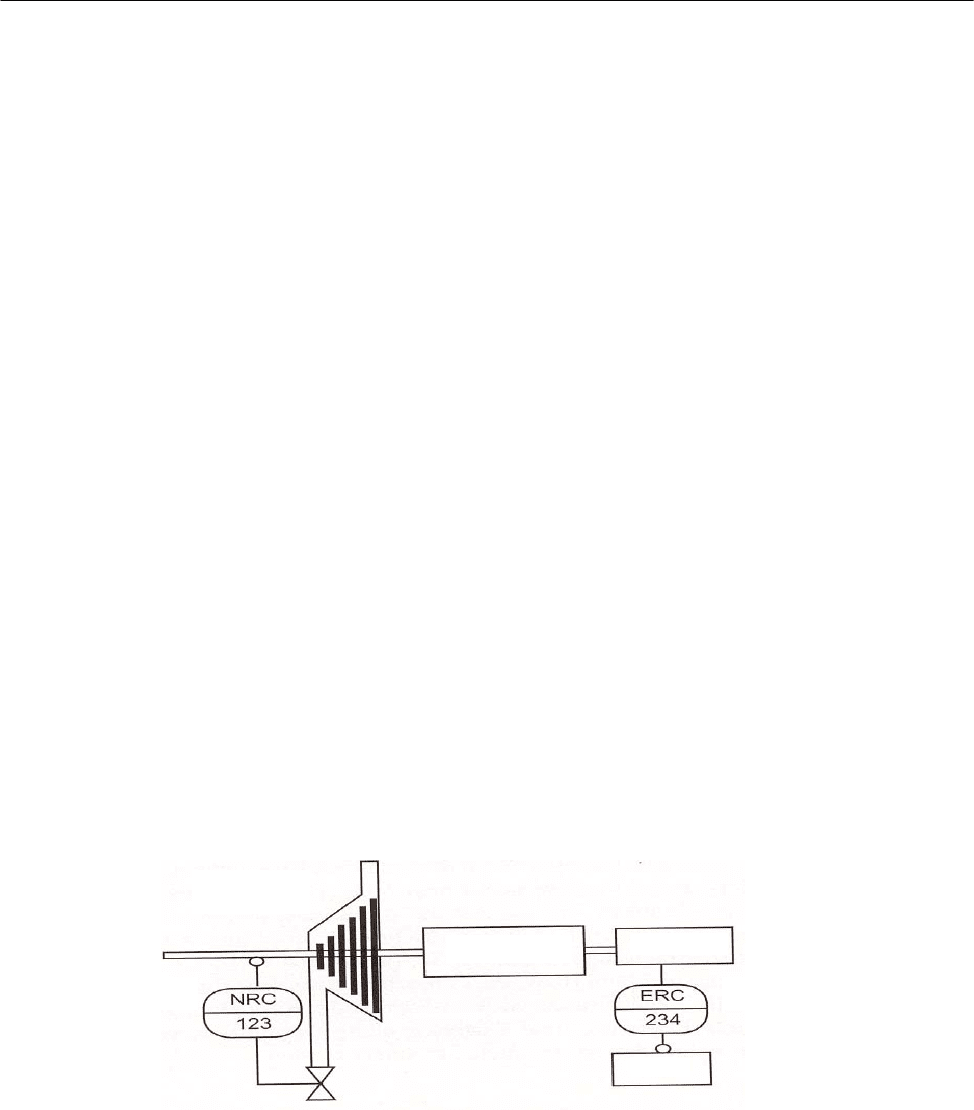
Турбина
Генератор Возбудитель
Регулятор числа Регулятор
оборотов напряжения
Сеть
ром при проектировании взаимосвязанной регулирующей системы является принцип
действия связи. Различают содействующую (положительную) связь и противодействующую
(отрицательную) связь. Оба вида связи поясним далее на примерах.
7.8.1 Отрицательная связь
В очень упрощенном виде принцип отрицательной связи можно объяснить на примере
регулирования турбинного привода (рис. 7.16). Регулироваться должна частота сети через
управление числом оборотов турбины и дополнительно напряжение сети для возбуждения
генератора. Через приводной вал между турбиной и генератором обе регулируемые
величины находятся в прямой взаимосвязи.
Если регулятор напряжения ERC234 выполнит регулирование (т. е. обеспечит
регулирующую разность = 0), а регулятор частоты NRC123 попытается увеличить число
оборотов, чтобы отработать свою появившуюся регулирующую разность, то с увеличением
оборотов турбины возрастет и напряжение на генераторных клеммах. Поэтому регулятор
напряжения ERC234 понизит возбуждение, чтобы вернуться к значению уставки по напряже-
Рис. 7.16 Технологическая мнемосхема отрицательной связи
нию. Но это вызовет небольшое встречное действие генератора, что опять же повлияет на
число оборотов турбины. Таким образом, имеет место отрицательная связь, поскольку
повышение мощности возбуждения ведет к снижению числа оборотов. Без соответствующих
предупредительных мер оба регулятора будут мешать друг другу, и это может привести к
7 Структуры регулирования
158
Регулятор
охлаждения
Регулятор
нагревания
длительным или даже раскачивающимся колебаниям. Система сама по себе возбудима и
склонна к нестабильности.
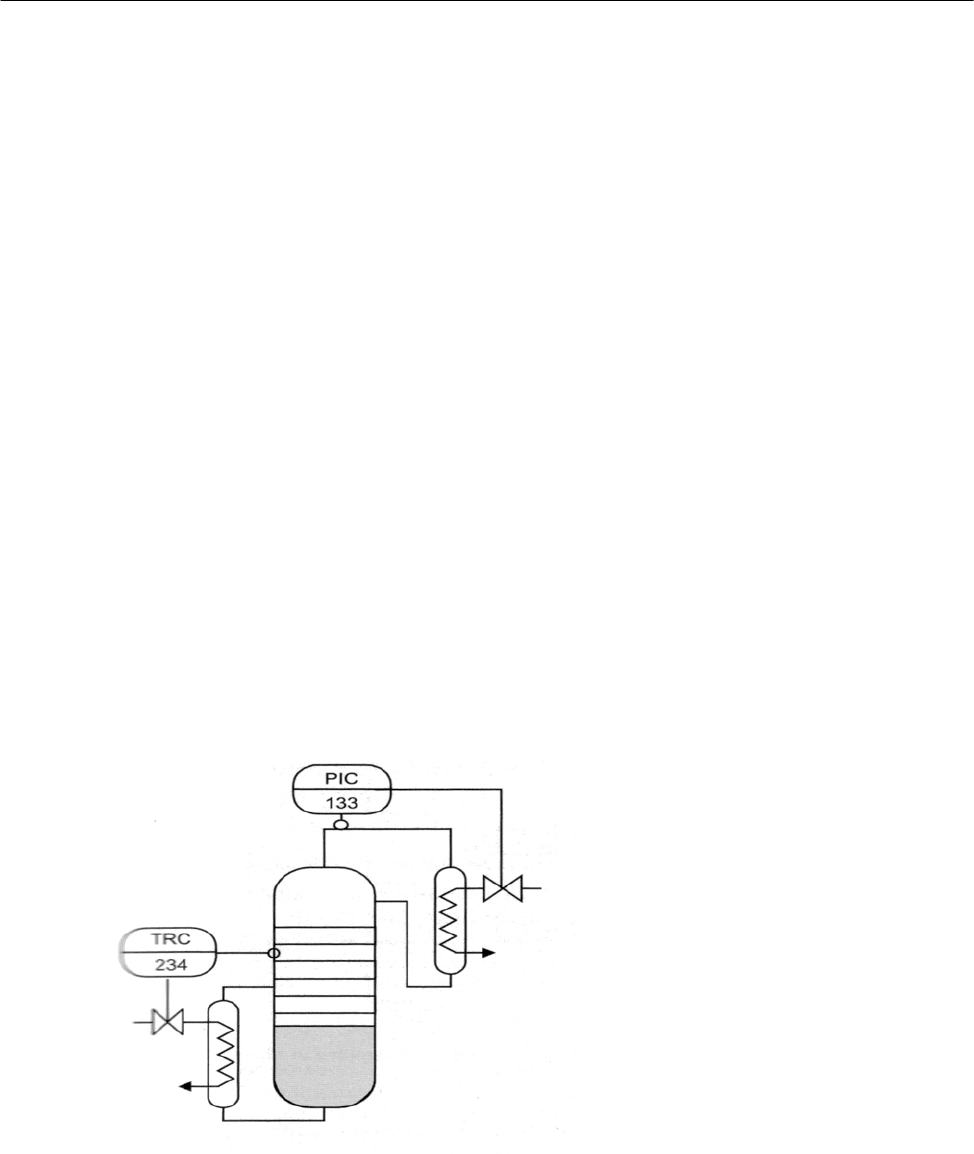
7.8.2 Положительная связь
В очень упрощенном виде принцип положительной связи можно объяснить на примере
регулирования дестилляционной колонны (рис. 7.17). Регулируется температура, которая
измеряется в зоне дестилляции, и давление вверху колонны. Если повышается температура в
зоне дестилляции, то
возрастает и давление вверху колонны. Вводимое в ответ на это
усиление охлаждения на выходе колонны вызывает более сильную конденсацию и с нею
снижение температуры. Таким образом, имеет место положительная связь, так как
увеличение температуры в зоне дестилляции вызывает увеличение необходимой мощности
охлаждения вверху дестиллятора. Без соответствующих предупредительных мер ввод в
действие
такой системы едва ли возможен. В специальной литературе предлагаются
довольно сложные мероприятия, как теоретически можно управлять таким регулированием
множества величин и как вводить его в действие.
Рис. 7.17
Технологическая мнемосхема
дестиллирования как пример
положительной связи
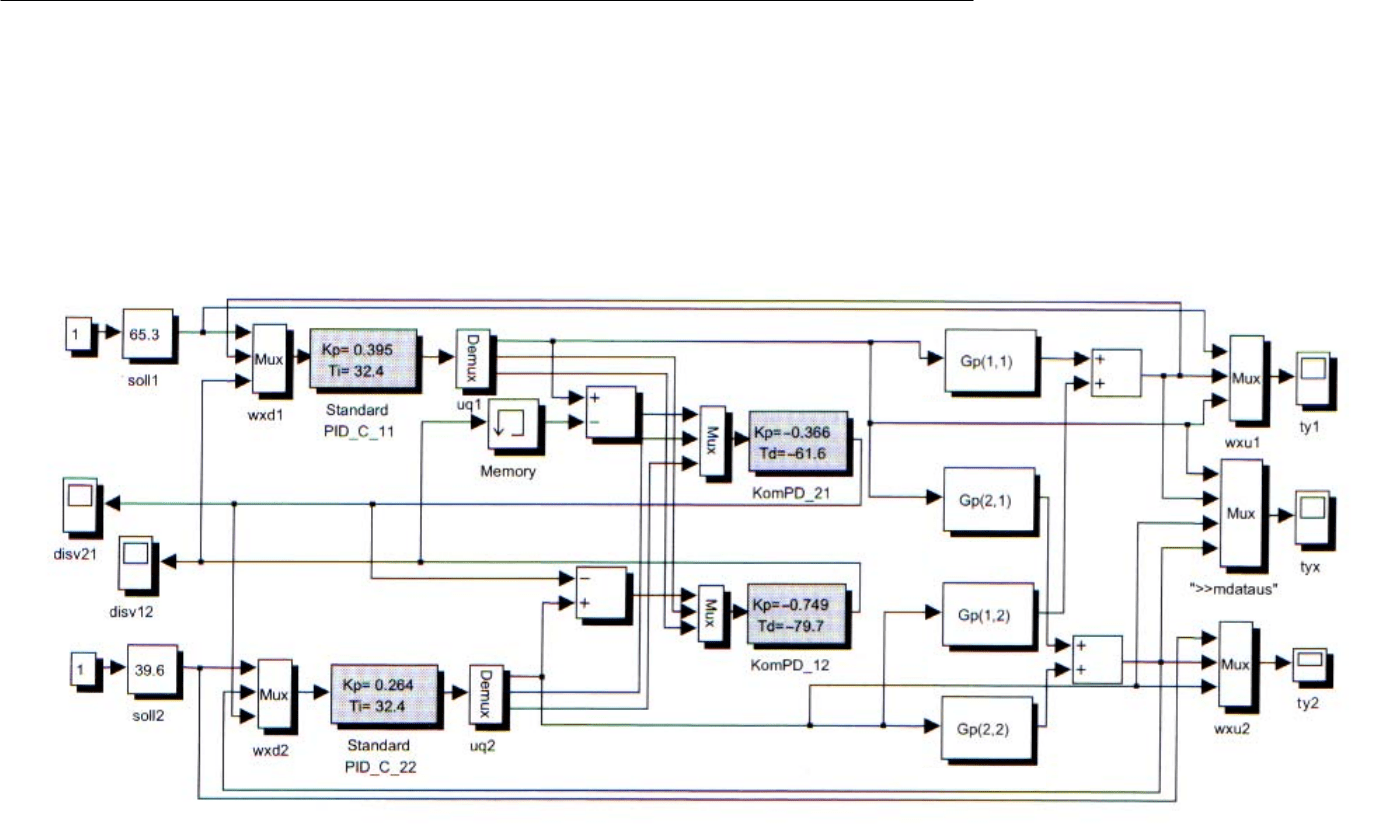
Простейшую возможность предлагают так называемые звенья развязки, которые включаются
между регулятором и процессом, как это схематически показано на рис 7.18. Мешающая
физическая связь между обоими контурами регулирования компенсируется, например,
передаточной функцией “KomPD_12” на рис. 7.19 нейтрализуется действие “связи 12”.
7 Структуры регулирования
159
Регулятор
Действительное
значение
Управляющее
Уставка Участок 1
воздействие
Связь
Регулятор
Уставка Управляющее
Участок 2
Действительное воздействие
значение
Этим разделяется объект регулирования со множеством величин на два приблизительно
независимых друг от друга участка – каждый с одной величиной, которые могут управляться
обычными PID-регуляторами.
Рис. 7.18 Мнемосхема регулирования множества величин с развязывающим устройством
Это теоретически убедительное решение требует, однако, значительных расходов на
практическую реализацию. Идеальное звено развязки должно содержать обратное
преобразование динамики процесса (например, G
KomPD
(1,2) = - G
P
(1,2) / G
P
(1,1)), которое
нереализуемо и должно быть аппроксимировано соответствующими численными методами
сокращения порядка. Упрошенные звенья развязки могут быть во многих случаях
выполнены с помощью дополнительных PD-регуляторов или даже уменьшены до
статических коэффициентов развязки. Если при конкретном применении потребуется такое
регулирование с развязкой, то его можно запросить в Siemens A&D GT5 в Карлсруэ, где
также имеется инструмент проектирования с вычислительной поддержкой, базирующийся на
Matlab.
На практике обычно не желательно, выходы различных звеньев развязки подключать
непосредственно к процессу, так как они могут помешать вероятному ручному режиму
работы основного регулятора. Здесь потребуется пересчет цепи развязки, и могут использо-
7 Структуры регулирования
160
Основной
процесс 1
Связь 21
Связь 12
Основной процесс 2
Рис. 7.19 Пример практической реализации регулирования множества величин в системе Matlab/Simulink