Mikles J., Fikar M. Process Modelling, Identification, and Control
Подождите немного. Документ загружается.

452 10 Adaptive Control
G(s)=
b(s)
a(s)
=
b
1
s + b
0
a
2
s
2
+ a
1
s + a
0
(10.8)
This system will be controlled by an adaptive feedback controller accord-
ing to the Simulink scheme ad033s.mdl shown in Fig. 10.5. Initialisation of
this diagram is performed with the script ad033init.m that sets the process,
identification and controller update sampling time. This file can be loaded
automatically in the same way as in the previous example by the command
set_param(’ad031s’, ’PreLoadFcn’, ’ad031init’);
Program 10.3 (Initialisation of the scheme in Fig. 10.5 – file)
ad033init.m
ts = .5;
G = tf([1 1.5],[1 3 2]);
param
To Workspace1
data
To Workspace
Step
Scope
stconcon
ST continuous
controller design
G
Process
Pred. error
s
1
Integrator
Cov. matrix
.1s +.4s+.2
2
.1s +.7s+.2
2
Controller
C−identification
SISO
Continuous identification
u
u
y
B
A
w
w
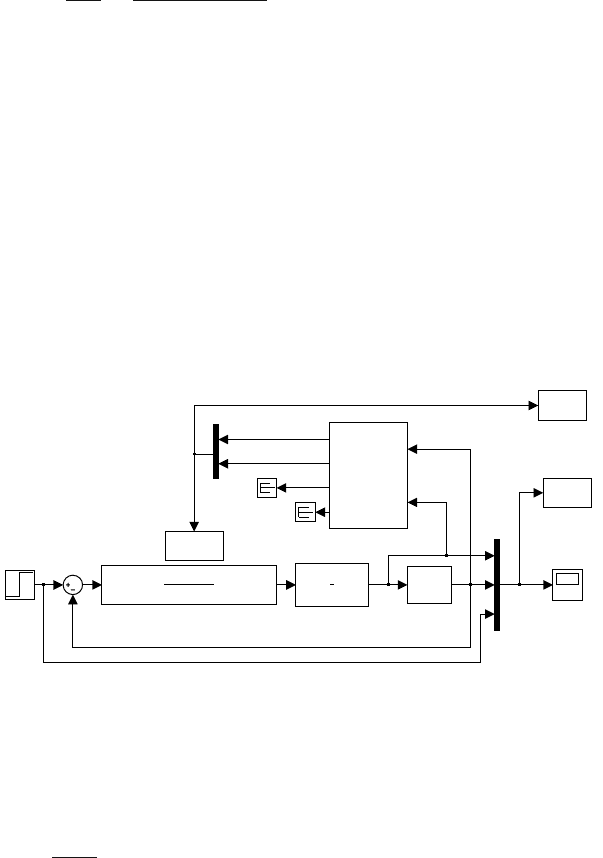
Fig. 10.5. Scheme ad0313.mdl in Simulink for LQ tracking of a continuous-time
second order system with a continuous-time adaptive controller
Parameters a
0
, a
1
, a
2
, b
1
, b
2
are estimated in the each sampling time. The
feedback LQ control law based on state observation is given as
u = −
q(s)
sp(s)
e (10.9)
where the polynomials
q(s)=q
2
s
2
+ q
1
s + q
0
,p(s)=p
2
s
2
+ p
1
s + p
0
(10.10)
are solution of the Diophantine equation
a(s)sp(s)+b(s)q(s)=o(s)f(s) (10.11)
Polynomials

10.3 Examples of Self-Tuning Control 453
o(s)=s
2
+ o
1
s + o
0
,f(s)=s
3
+ f
2
s
2
+ f
1
s + f
0
(10.12)
are stable and monic and f(s) is defined by the spectral factorisation equation
˜a(−s)˜a(s)+
˜
B
Rs
(−s)
˜
Q
n
˜
B
Rs
(s)=f(−s)f(s) (10.13)
where
˜a(s)=sa(s),
˜
B
Rs
(s)=˜a(s)(sI −A
n
)
−1
B
n
(10.14)
A
n
=
0 I
0 A
, B
n
=
0
B
(10.15)
A =
01
−a
0
−a
1
, B =
0
1
(10.16)
Weighting matrix
˜
Q
n
of the form
˜
Q
n
=
Q 0
00
(10.17)
follows from the cost function to be minimised
I =
1
2
∞
0
x
T
Qx +˙u
2
dt (10.18)
where
Q =
Q
1
0
0 Q
1
(10.19)
Coefficients of the control law are determined in each sampling instant from
equation (10.11) based on estimated parameters a
0
, a
1
, a
2
, b
0
, b
1
. Finally, the
control action is realised.
Parameter estimation is for the case shown in Fig. 10.5 implemented using
the continuous-time SISO identification block from the library IDTOOL and
the controller parameters are calculated in the S-function stconcon.
MATLAB function set_param is used to transfer the calculated controller
parameters into the block Controller and thus to close the adaptive control
loop. The implementation is as follows.
Program 10.4 (S-funkcia stconcon.m)
function [sys,x0,str,ts] = stconcon(t,x,u,flag,tsamp)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes(tsamp);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
454 10 Adaptive Control
sys=mdlOutputs(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
error([’Unhandled flag = ’,num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes(tsamp)
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 0;
sizes.NumInputs = 5;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [tsamp 0];
% Controller initialisation
Denominator = ’[.1 .7 .2]’;
Numerator = ’[.1 .4 .2]’;
set_param(’ad033s/Controller’, ’Numerator’, Numerator, ...
’Denominator’, Denominator);
function sys=mdlOutputs(t,x,u)
if t>4 % begin adaptive control
b1 = u(1); b0 = u(2); b = b1*s + b0;
a2 = u(3); a1 = u(4); a0 = u(5); a = a2*s^2 + a1*s + a0;
An=[0 0 1 0;0 0 0 1;0 0 0 1;0 0 -a0 -a1];
Bn=[0;0;0;1];
Cn=[b0 b1 0 0];
[BRs,AR]=ss2rmf(An,Bn,eye(4));
BR=Cn*BRs;
Q1=1; Q2=1;
Qn=[Q1 0 0 0;0 Q2 0 0;0 0 0 0;0 0 0 0];
[Dc,J]=spf(AR’*AR+BRs’*Qn*BRs);
Df=s^2+1.5*s+3;
[x0,y0]=axbyc(AR,BR,Dc*Df);
tt = 0;
xx=x0-b*tt;
yy=y0+a*tt;
10.3 Examples of Self-Tuning Control 455
Denominator = sprintf(’[%f %f %f]’,xx{2},xx{1},xx{0});
Numerator = sprintf(’[%f %f %f]’,yy{2},yy{1}, yy{0});
set_param(’ad033s/Controller’, ’Numerator’, Numerator, ...
’Denominator’, Denominator);
end
sys=[];
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlTerminate(t,x,u)
sys = [];
0 5 10 15 20
0
0.5
1
1.5
2
2.5
3
(a)
t
u,y,w
u
y
w
0 5 10 15 20
−0.5
0
0.5
1
1.5
(b)
t
Param
b1
b0
a1
a2
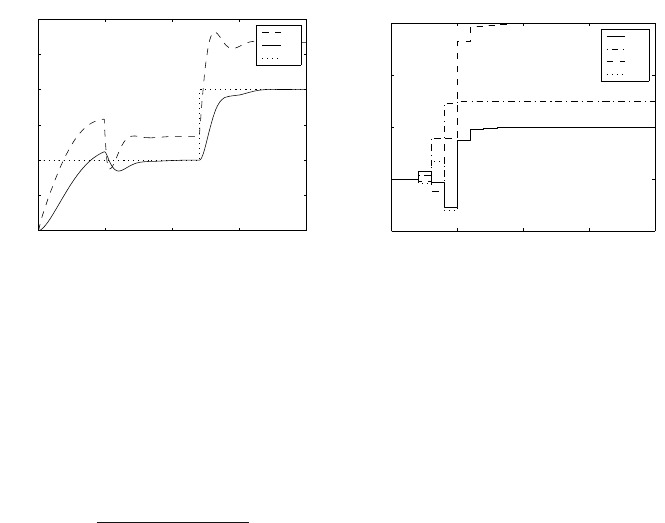
Fig. 10.6. Trajectories of (a) input, output, and setpoint variables, (b) identified
parameters of the continuous-time process model controlled with LQ controller
Fig. 10.6a shows trajectories of input and output variables of the controlled
process and Fig. 10.6b gives the trajectories of the estimated parameters. ID-
TOOL normalises the estimated transfer function, thus a
0
= 1. LQ weighting
coefficients were set as ϕ =1,ψ = 10.
The nominal controller and the observer polynomial were set as
R(s)=
0.1s
2
+0.4s +0.2
0.1s
2
+0.7s +0.2
,o(s)=s
2
+1.5s + 3 (10.20)
The adaptive closed-loop system was controlled in the first eight sampling
periods (T
s
=0.5) with this nominal controller. Afterwards, the controller
calculated in the block stconcon was used. The choice of the sampling period
follows from the dynamical properties of the process. The controlled process
used in the simulation was the same as its model.

456 10 Adaptive Control
10.3.3 Continuous-Time Adaptive MIMO Pole Placement Control
Consider a continuous-time multivariable controlled system with the transfer
function matrix
www
G(s)=A
−1
L
(s)B
L
(s) (10.21)
where
A
L
(s)=
1+a
1
sa
2
s
a
3
s 1+a
4
s
, B
L
(s)=
b
1
b
2
b
3
b
4
(10.22)
and a
1
a
4
= a
2
a
3
.
Nonadaptive LQ control of this system was illustrated in Example 8.11 on
page 386.
This system will be controlled by an adaptive feedback controller accord-
ing to the Simulink scheme ad035s.mdl shown in Fig. 10.7. Initialisation of
this diagram is performed with the script ad035init.m that sets the process,
integrator, identification and controller update sampling time. This file can
be loaded automatically in the same way as in the previous example by the
command
set_param(’ad035s’, ’PreLoadFcn’, ’ad035init’);
Program 10.5 (Initialisation of the scheme in Fig. 10.7 – file)
ad035init.m
ts = 0.5;
al = [1+.3*s, .5*s; .1*s 1+0.7*s];
bl = [.2 .4;.6 .8];
bl = pol(bl);
[a,b,c,d] = lmf2ss(bl,al);
G = ss(a,b,c,d);
Parameters of the left matrix fraction a
i
,b
i
are estimated in each sampling
instant.
To calculate the controller, it is necessary to determine the right matrix
fraction of the controlled process
A
−1
L
(s)B
L
(s)=B
R
(s)A
−1
R
(s) (10.23)
The feedback controller
R(s)=P
−1
L
(s)Q(s)=
p
1
sp
2
s
p
3
sp
4
s
−1
q
1
+ q
2
sq
3
+ q
4
s
q
5
s + q
6
sq
7
s + q
8
s
(10.24)
is then obtained by solving the matrix Diophantine equation
P
L
(s)A
R
(s)+Q
L
(s)B
R
(s)=
˜
O
L
(s)F
R
(s) (10.25)
where the matrix
˜
O
L
(s)F
R
(s) determines poles of the closed-loop system.
10.3 Examples of Self-Tuning Control 457
param
To Workspace1
data
To Workspace
Step
Scope
st2i2ocon
ST MIMO continuous
controller design
G
Process
Pred. error
LDDIF
Lddif
Cov. matrix
x’ = Ax+Bu
y = Cx+Du
Controller
C−filter
Continuous
filter
w
w
yu
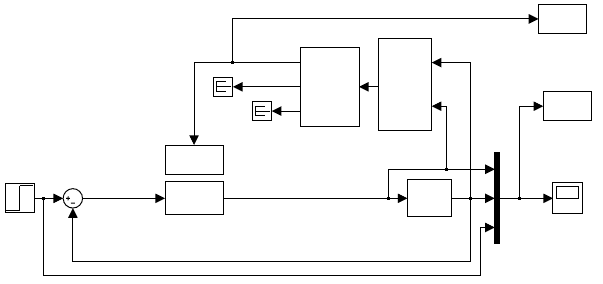
Fig. 10.7. Scheme ad035s.mdl in Simulink for tracking of a multivariable system
with a continuous-time adaptive controller
Parameter estimation is for the case shown in Fig. 10.7 implemented us-
ing the blocks from the library IDTOOL and the controller parameters are
calculated in the S-function st2i2ocon.
MATLAB function set_param is used to transfer the calculated controller
parameters into the block Controller and thus to close the adaptive control
loop. The implementation is as follows.
Program 10.6 (S-funkcia st2i2ocon.m)
function [sys,x0,str,ts] = st2i2ocon(t,x,u,flag,tsamp)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes(tsamp);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
error([’Unhandled flag = ’,num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes(tsamp)
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 0;
sizes.NumInputs = 8;
sizes.DirFeedthrough = 1;
458 10 Adaptive Control
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [tsamp 0];
% Controller initialisation
A=’[0 0; 0 0]’;
B=’[1 0; 0 1]’;
C=’[1 0;0 1]’;
D=’[.1 .1 ; .1 .1]’;
set_param(’ad035s/Controller’, ...
’A’, A, ’B’, B, ’C’, C, ’D’, D);
function sys=mdlOutputs(t,x,u)
if t>4 % begin adaptive control
al = [1+u(1)*s, u(2)*s; u(5)*s, 1+u(6)*s];
bl = pol([u(3), u(4); u(7), u(8)]);
[br,ar] = lmf2rmf(bl,al);
ar = ar * s; % add integrator
% closed-loop poles
clpoles = [(0.7*s+1)*(1.5*s+1),0;0,(0.7*s+1)*(1.5*s+1)];
[pl,ql]=xaybc(ar, br, clpoles);
[ac,bc,cc,dc] = lmf2ss(ql,pl*s);
A = sprintf(’[%f %f; %f %f]’,ac’);
B = sprintf(’[%f %f; %f %f]’,bc’);
C = sprintf(’[%f %f; %f %f]’,cc’);
D = sprintf(’[%f %f; %f %f]’,dc’);
set_param(’ad035s/Controller’, ...
’A’, A, ’B’, B, ’C’, C, ’D’, D);
end
sys=[];
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlTerminate(t,x,u)
sys = [];
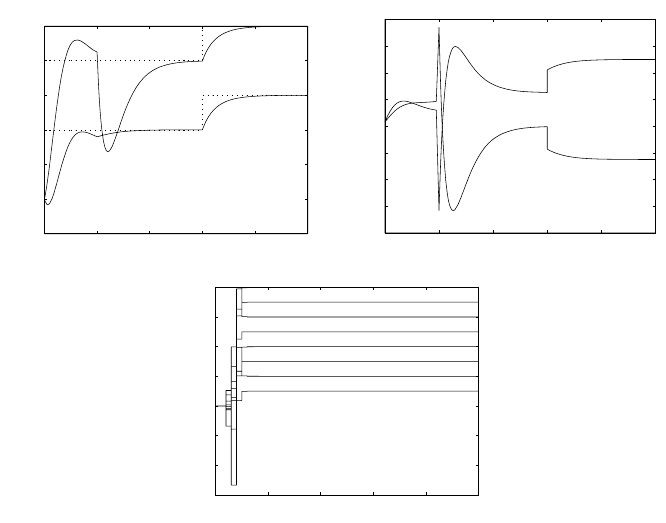
Fig. 10.6a,b shows trajectories of input and output variables of the
controlled process and Fig. 10.6c gives the trajectories of the estimated
parameters.
The nominal controller and the closed-loop poles were set as
10.3 Examples of Self-Tuning Control 459
0 5 10 15 20 25
−0.5
0
0.5
1
1.5
2
2.5
(a)
t
y,w
0 5 10 15 20 25
−8
−6
−4
−2
0
2
4
6
8
(b)
t
u
0 5 10 15 20 25
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
(c)
t
Param
Fig. 10.8. Trajectories of (a) output, and setpoint variables, (b) input variables, (c)
identified parameters of the continuous-time process controlled with a pole placement
controller
R(s)=
s 0
0 s
−1
1+0.1s 0.1s
0.1s 1+0.1s
(10.26)
˜
O
L
(s)F
R
(s)=(0.7s + 1)(0.5s +1)I (10.27)
The adaptive closed-loop system was controlled in the first eight sampling
periods (T
s
=0.5) with this nominal controller. Afterwards, the controller
calculated in the block st2i2ocon was used. The controlled process used in
the simulation was the same as its model.
10.3.4 Adaptive Control of a Tubular Reactor
This example dealing with the control of a tubular chemical reactor describes
the adaptive implementation of GPC. A linear model is estimated on-line with
a recursive least squares algorithm and successively controlled.
We consider an ideal plug-flow tubular chemical reactor with an exothermic
consecutive reaction A → B → C in the liquid phase and with countercurrent
cooling. It is assumed that A is the educt, B is the desired product and C the

460 10 Adaptive Control
unwanted by-product of the reaction. Such reactors are central components of
many plants in the chemical industry and exhibit highly nonlinear dynamics.
Mathematical model of this reactor is given as
∂c
A
∂t
= −v
∂c
A
∂z
− k
1
c
A
(10.28)
∂c
B
∂t
= −v
∂c
B
∂z
k
1
c
A
− k
1
c
B
(10.29)
∂T
∂t
= −v
∂T
∂z
+
q
r
ρc
p
−
4U
1
d
1
ρc
p
(T − T
w
) (10.30)
∂T
w
∂t
=
4
(d
2
2
− d
2
1
)ρ
w
c
pw
[d
1
U
1
(T − T
w
)+d
2
U
2
(T
c
− T
w
)] (10.31)
∂T
c
∂t
= v
∂T
c
∂z
+
4n
1
d
2
U
2
(d
2
3
− n
1
d
2
2
)ρ
c
c
pc
(T
w
− T
c
) (10.32)
with initial conditions
c
A
(z,0) = c
s
A
(z),T(z,0) = T
s
(z),T
c
(z,0) = T
s
c
(z)
c
B
(z,0) = c
s
B
(z),T
w
(z,0) = T
s
w
(z)
(10.33)
and with boundary conditions
c
A
(0,t)=c
A0
(t),T(0,t)=T
0
(t)
c
B
(0,t)=c
B0
(t),T
c
(L, t)=T
cL
(t).
(10.34)
Here t is time, z space variable along the reactor, c are concentrations, T are
temperatures, v are fluid velocities, d are diameters, ρ are densities, c
p
are
specific heat capacities, and U are heat transfer coefficients. The subscripts
are (.)
w
for metal wall of tubes, (.)
c
for coolant, and (.)
s
for steady-state
values. The reaction rates k and the heat of reactions are expressed as
k
j
= k
0j
exp(−E
j
/RT ) ,j=1, 2 (10.35)
q
r
= h
1
k
1
c
A
+ h
2
k
2
c
B
(10.36)
where k
0
are exponential factors, E are activation energies and h are reaction
enthalpies.
Assuming the reactant temperature measurement along the reactor at
points z
j
, the mean temperature profile can be expressed as
T
m
(t)=
1
n
n
j=1
T (z
j
,t) (10.37)
where n is the number of measured temperatures along the reactor.
The input variable, the value of q
c
, has been assumed to be constrained in
the interval
0.2 ≤ q
c
≤ 0.35 (10.38)

10.3 Examples of Self-Tuning Control 461
For the control purposes both the manipulated input and the controlled
output were defined as scaled deviations from their steady-state values
u(t)=
q
c
(t) −q
s
c
q
s
c
,y(t)=
T
m
(t) −T
s
m
T
s
m
. (10.39)
This scaling helps to obtain variables with approximately the same magnitude
and reduces the possibility of ill-conditioned control problem and round-off
errors.
The sampling time was chosen T
s
=3s and the reactor was on-line iden-
tified as SISO discrete system with deg(A)=2, deg(B)=3oftheform
y(k)=−a
1
y(k−1)−a
2
y(k−2)+b
1
u(k−1)+b
2
u(k−2)+b
3
u(k−3)+d
c
+ξ
(10.40)
The estimation method used is the recursive least-squares algorithm LDDIF
with exponential and directional forgetting. The value of exponential forget-
ting was set at 0.8 and the minimum of the covariance matrix was constrained
to 0.01I. The purpose of these settings was to improve tracking properties of
the estimation algorithm.
The result of the first simulation is shown in Fig. 10.9. It shows comparison
of two GPC settings: mean-level (ml) and dead-beat (db) control.
The upper graph represents behaviour of the controlled variable T
m
to-
gether with its reference value and the lower graph manipulated variable q
c
.
The values of GPC tuning parameters [N
1
,N
2
,N
u
,λ] were [1, 15, 1, 10
−1
]
for mean-level and [3, 7, 3, 10
−5
] for dead-beat, respectively. These values cor-
respond to the slow open loop response (ml) and the fastest dead-beat re-
sponse. The polynomials P, C were set to 1 as the effect of disturbances is
very small. One can notice that the dead-beat control strategy actively uses
constraints on manipulated variable defined by Eq. (10.38).
The purpose of the second simulation was to investigate the behaviour
of GPC with respect to unmeasured disturbances. The output variable was
corrupted by measurement noise with variance 0.1K. The inlet concentration
c
A0
of the component A varied in steps and was given as
t
0 100 300 500
c
A0
− c
s
A0
0 0.1 0 0.1
Due to the presence of disturbances, the design polynomials P,C were
used. The polynomial C attenuates effects of measurement noise and the
polynomial P shapes responses of the closed-loop system subject to load
disturbances in c
A0
and also to reference step changes. The degrees of the
polynomials were chosen 1 and their values as
P =0.6 −
2
3
z
−1
,C=1− 0.8z
−1
. (10.41)
The GPC controller was implemented with the mean-level strategy and had
the values of the tuning parameters given as [1, 15, 1, 10
−1
].