Марченко Ю.Н. Конспект лекций по курсу Теория автоматического управления
Подождите немного. Документ загружается.


21
Это одна из основных формул структурного метода теории автомати-
ческого управления.
Соединение блоков, приведенное на рисунке 1.25 еще называется
замкнутой системой с обратной связью, если под
)(
2
p
ϕ
понимается переда-
точная регулятора. Обратная связь называется положительной, если
2
yf
+
,
и отрицательной, если
2
yf −
.
Пример 3. Найти передаточную функцию антипараллельного соедине-
ния блоков (рисунок 1.26).
В соответствии с риунком 1.26
можно записать:
)()()(
21
yfppy −⋅
⋅
=
ϕ
ϕ
.
Решим это уравнение относительно
y
:
f
pp
pp
y ⋅
⋅+
⋅
=
)()(1
)()(
21
21
ϕϕ
ϕϕ
.
Тогда выражение для передаточной
функции замкнутого контура с обратной связью в данном примере будет
иметь вид:
)()(1
)()(
)(
21
21
pp
pp
pG
ϕϕ
ϕϕ
⋅+
⋅
=
.
Примечание 1. С учетом изложенного выше, можно сформулировать
следующее правило для записи передаточной функции замкнутого контура:
передаточная функция замкнутого контура (с обратной связью) определяется
как отношение, где в числителе записывается произведение передаточных
функций блоков в прямой цепи (от места приложения входного воздействия
до выходной переменной), а в знаменателе - единица плюс/минус
произведение передаточных функций всех блоков замкнутого контура. Знак
плюс ставится для отрицательной обратной связи и минус – для
положительной обратной связи.
Примечание 2. Случай обратной связи, рассмотренный в примере,
называется единичной отрицательной обратной связью.
1
f
y
+
-
2
u
Рисунок 1.26. Соединение с
единичной обратной
связью

22
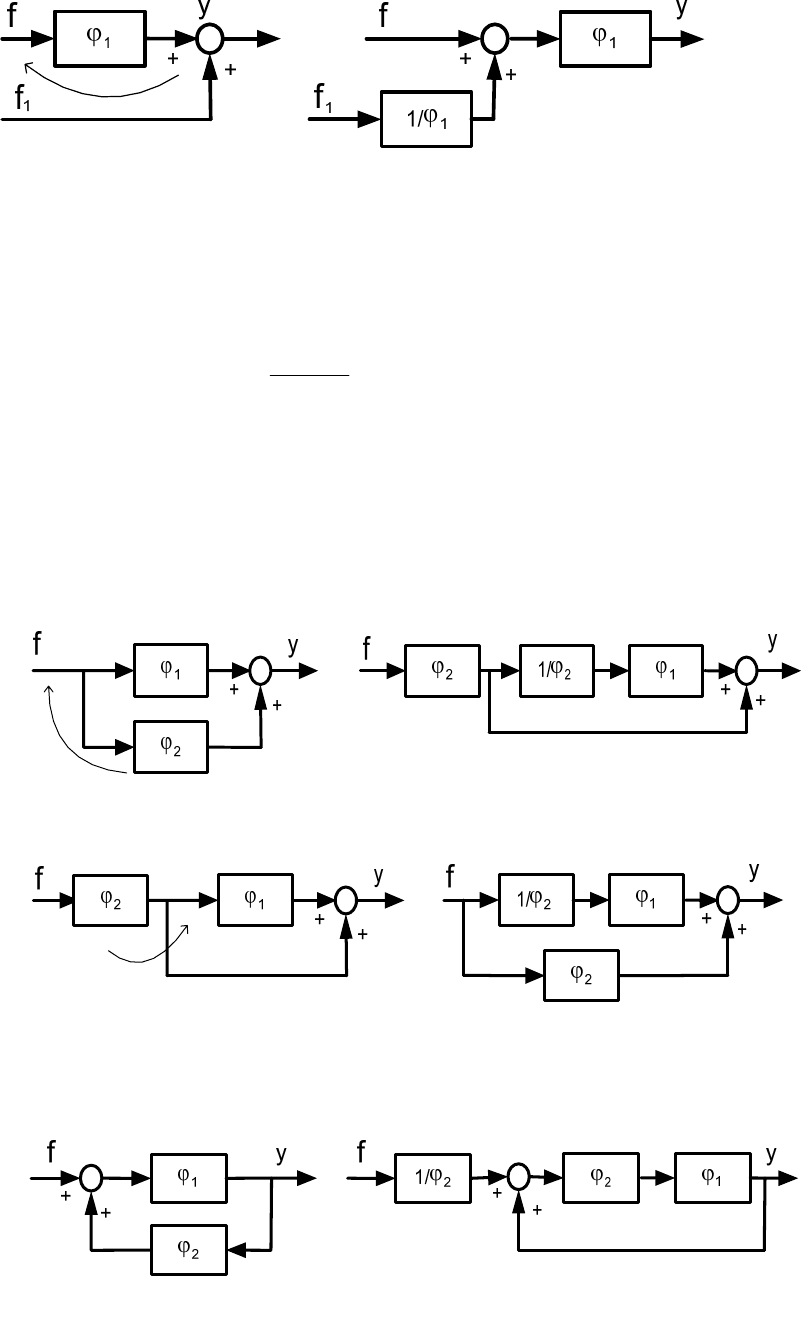
1.6. Эквивалентные структурные преобразования.
В процессе анализа или синтеза структур систем автоматического
управления полезно использовать правила преобразования структурных схем
с целью их упрощения, выявления их особенностей и облегчения восприятия.
Можно указать два основных правила преобразования структурных
схем: перенос точки разветвления и перенос точки суммирования.
Правило переноса точки разветвления.
1) Если точка разветвления
переносится против направления
прохождения сигнала, то в перносимую ветвь нужно включить элементы с
передаточными функциями всех элементов, встречающихся на пути между
прежней и новой точками разветвления (рисунок 1.27).
Покажем,что схемы представленные на рисунках 1.27а и 1.27б
эквивалентны. Действительно, на рисунке 1.27а:
.)(
;)(
11
1
fpyy
fpy
⋅==
⋅=
ϕ
ϕ
и на рисунке 1.27б:
,)(
,)(
11
1
fpy
fpy
⋅=
=
ϕ
ϕ
что и требовалось доказать.
2) Если точка разветвления переносится по направлению прохождения
сигнала, то в переносимую ветвь нужно включить элементы с обратными пе-
редаточными функциями всех элементов, встречающихся на пути между
прежней и новой точками разветвления (рисунок 1.28).
а) б)
Рисунок 1.27. Перенос точки разветвления против
прохождения сигнала
а) б)
Рисунок 1.28. Перенос точки разветвления пона
правлению прохождения сигнала

23
Эквивалентность схем следует из равенства передаточных функций по
каналам «
yf −
», «
1
yf −
». Действительно, из рисунка 1.28а:
fy
fpy
=
⋅=
1
1
;)(
ϕ
а из рисунка 1.28б:
.
)(
)(
1
)(
1
;)(
1
11
1
1
ffp
p
y
p
y
fpy
=⋅⋅=⋅=
⋅=
ϕ
ϕϕ
ϕ
,
что и требовалось доказать.
Правило переноса сумматора.
1) Если точка суммирования переносится по направлению
прохождения сигнала, то в переносимую ветвь нужно включать элементы с
передаточными фунциями всех элементов, встречающихся на пути между
прежней и новой точками суммирования (рисунок 1.29).
Схемы на рисунках 1.29а (исходная схема) и 1.29б (конечная
схема)
эквивалентны, так как равны передаточные функции по каналам «
yf
−
» и
«
yf −
1
».
Действительно, из рисунка 1.29а следует:
);()(
11
ffpy +⋅=
ϕ
из рисунка 1.29б:
).()()()(
11111
ffpfpfpy
+
⋅
=
⋅
+⋅=
ϕ
ϕ
ϕ
2) Если точка суммирования переносится против направления прохож-
дения сигнала, то в переносимую ветвь нужно включать элементы с обрат-
ными передаточными функциями всех элементов, встречающихся между но-
вой и прежней точками суммирования (рисунок 1.30).
Эквивалентность схем следует из равенства передаточных функций по
всем каналам преобразования входных сигналов.
На рисунке 1.30а:
;)(
11
ffpy +⋅=
ϕ
а) б)
Рисунок 1.29. Перенос сумматора по ходу прохождения
сигнала
24
На рисунке 1.30б:
11
1
11
)(]
)(
1
[)( ffp
p
ffpy +⋅=⋅+⋅=
ϕ
ϕ
ϕ
.
Некоторые типовые структурные схемы и эквивалентные
соотношения. Ниже рассматриваются наиболее часто встречающиеся
элементы структурного анализа схем автоматического регулирования.
1. Удаление блока из прямой петли.
2. Введение блока в прямую петлю.
3. Устранение блока из контура обратной связи
4
.
а) б)
Рисунок 1.30. Перенос сумматора против направления
прохождения сигнала

25
4. Введение блока в контур обратной чвязи
1.7. Основные принципы регулирования
В современной теории автоматического регулирования различают
четыре принципа регулирования:
- по нагрузке;
- по возмущению;
- по обратной связи;
- комбинированнный.
Задача регулирования заключается в выработке таких управляющих
воздействий на объект, которые обеспечили бы равенство выходных
переменных некоторым заранее
известным, задающим воздействиям. Эта
задача еще называется задачей стабилизации.
Регулирование по нагрузке. Задача регулирования по нагрузке
возникает при отсутствии координатного возмущения или когда им можно
пренебречь и воздействие на объект нужно осуществлять лишь в том случае,
когда нужно изменить значение регулируемой величины. Управляющее
воздействие формируется как:
∗−∗
⋅= ypu
u
)(
1
ϕ
, (11)
где
)(
1
p
u
−
ϕ
- оператор обратный оператору объекта управления;
∗
y
- задан-
ное значение выходной величины.
Если уравнение объекта имеет вид:
upy
u
⋅
=
)(
ϕ
, то после подстанов-
ки в него (11) получим:
**1*
)()()( yyppupy
uuu
=⋅⋅=⋅=
−
ϕϕϕ
.
Принцип регулирования по нагрузке приводит к структурной схеме
системы автоматического регулирования приведенной на рисунке 1.31.
При конструирова-
нии регулятора
u
f
в рас-
сматриваемой системе не-
обходимо знать все свой-
ства объекта управления.
Только при этом условии
и отсутствии возмущений
можно правильно предви-
Рисунок 1.31 – Схема САР по нагрузке

26
деть влияние задающего воздействия на регулируемую величину.
Область применения принципа регулирования по нагрузке в «чистом»
виде ограничена случаями когда нельзя пренебречь действием возмущений.
Неприменим такой подход и в случае неустойчивого или нейтрального объ-
екта управления.
Регулирование по возмущению. Различают САР с контролируемым
возмущением и с косвенной оценкой неконтролируемого возмущения.
Структура системы
автоматического регулиро-
вания в первом случае
включает еще один эле-
мент- регулятор по контро-
лируемым возмущениям
w
f
, в котором формируется
компенсирующее воздейст-
вие:
.)( wpfu
ww
⋅
=
(12)
Уравнение объекта управления в рассматриваемом случае имеет вид:
wpwpfupy
wwu
⋅+⋅+⋅=
∗
)(])([)(
ϕϕ
,
или, при выполнении условия (11) имеем:
wpfpwpyy
wuw
⋅⋅+⋅+=
∗
)()()(
ϕϕ
. (13)
Анализ уравнения (13) дает условие компенсации:
0)()()(
=
⋅
+ pfpp
wuw
ϕ
ϕ
. (14)
Недостатки принципа регулирования по возмущениям:
- как и в предыдущем случае неустойчивые объекты не могут быть ста-
билизированы с использованием только этого принципа;
- в соответствии с условием компенсации (14) оператор регулятора по
возмущениям определяется как:
)()()(
1
pppf
uww
−
⋅−=
ϕϕ
; поскольку опе-
ратор
)( p
u
ϕ
моделирует реальный процесс, то обратный оператор не всегда
осуществим;
- в большинстве случаев отсутствует полная информация о
)(),( pp
uw
ϕϕ
, что делает невозможным выполнение условия (14).
В обоих случаях – при использовании принципа регулирования по на-
грузке или принципа регулирования по возмущениям системы регулирования
являются разомкнутыми, в них регулируемая величина не влияет на действие
регулятора.
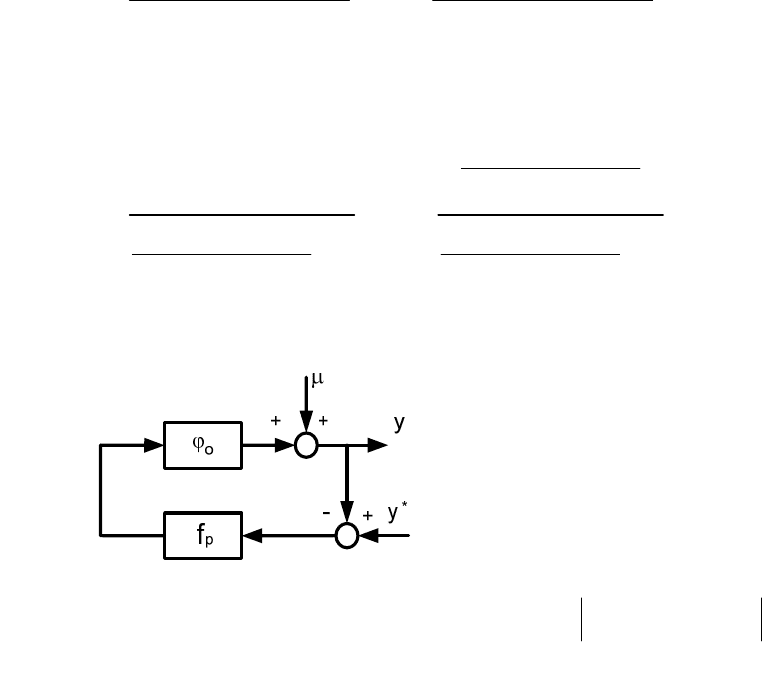
Идею регулирования по косвенно оцениваемому неконтролируемому
возмущению можно проиллюстрировать на следующем примере (рисунок
1.33). Пусть
1=
э
f
и
0
≠
μ
и
μ
- неконтролируемое возмущение приве-
денное к входу объекта управления.
Рисунок 1.32 – Схема САР по возмущениям

27
Величина регулирующего воздействия
u
при
1=
э
f
и
0
*
=y
опре-
деляется выражением:
)( pu
τ
ϕ
μ
⋅−=
,
где
)( p
τ
ϕ
- оператор звена
чистого запаздывания. Та-
ким образом, управляющее
воздействие в текущий мо-
мент времени представляет
собой оценку неконтроли-
руемого возмущения, дей-
ствовавшего в объекте
τ
времени назад.
Условия компенсации
в САР с косвенной оценкой
возмущения определяются
следующим образом. Запишем уравнение системы:
).()()()[(
);()()(
1*
pfpupyyu
ppuy
э
o
to
⋅⋅+⋅−=
⋅⋅+=
−
τ
ϕϕ
ϕϕμ
(15)
Исключая промежуточные переменные получим:
μϕϕϕϕ
τ
⋅⋅−⋅+⋅⋅= )]()(1)[()()()(
*
ppfppypfpy
t
э
to
э
. (16)
Тогда
*
yy =
обеспечивается при условии:
1)()( =⋅ pfp
э
τ
ϕ
. (17)
Или
τ
τ
ϕ
pэ
eppf == )(/1)(
, то есть физически нереализуемое звено
(«идеальный прогнозатор»). В реальной системе выходная переменная всегда
будет отличаться от ее заданного значения на величину ошибки прогнозиро-
вания.
САР представленная на рисунке 1.33 является разомкнутой при усло-
вии, если точно известны
)( p
τ
ϕ
и
)(
0
p
ϕ
, то есть она относится к разомк-
нутым САР и отклонение выходной величины не влияет на формирование
регулирующего воздействия.
Регулирование по отклонениям. В подавляющем большинстве случа-
ев отсутствует исчерпывающая информация о свойствах объекта управления
и действующих возмущений и разомкнутые системы регулирования оказы-
ваются неэффективными. Поэтому при синтезе САР прибегают к использо-
ванию принципа регулировании по отклонениям (с обратной связью). В этом
случае отклонения выходной переменной учитываются при расчете регули-
рующих воздействий. Структура системы управления по отклонениям при-
ведена на рисунке 1.34.
Условие компенсации для рассматриваемого случая определяются ана-
логично тому как это делалось выше.
Рисунок 1.33. – Косвенное оценивание
возмущения
28
Уравнение САР имеет вид:
μ
ϕϕ
ϕ
⋅
⋅+
+⋅
⋅+
⋅
=
)()(1
1
)()(1
)()(
*
pfp
y
pfp
pfp
y
popo
po
. (18)
Разделим числитель и знаменатель правой части (18) на
)()(
0
pfp
p
⋅
ϕ
. Получим:
μ
ϕ
ϕ
ϕ
⋅
+
⋅
⋅
+⋅
+
⋅
=
1
)()(
1
)()(
1
1
)()(
1
1
*
pfp
pfp
y
pfp
y
po
po
po
. (19)
Точная реализация заданного
значения выходной переменной и
полная компенсация возмущающе-
го воздействия будет происходить
при условии, что модуль произве-
дения передаточных функций объ-
екта управления и регулятора будет
достаточно большим:
1)()(
0
>>⋅ pfp
p
ϕ
.
Тогда выражение (19) можно
записать как
*
yy ≈
.
μ
в данном случае некоторое эквивалентное возмуще-
ние, приведенное к выходу объекта, включающее в себя эффекты действия
всех координатных возмущений как на объект управления так и на регуля-
тор.
Положительными моментами использования принципа регулирования
по отклонению является возможность применения для неустойчивых объек-
тов и не предполагается отсутствие или незначительность действующего воз-
мущения.
К недостаткам принципа регулирования по отклонениям относится
проблема устойчивости САР с большим коэффициентом усиления регулято-
ра (так называемая глубокая обратная связь). Для объектов с запаздыванием
эта проблема становится еще более актуальной.
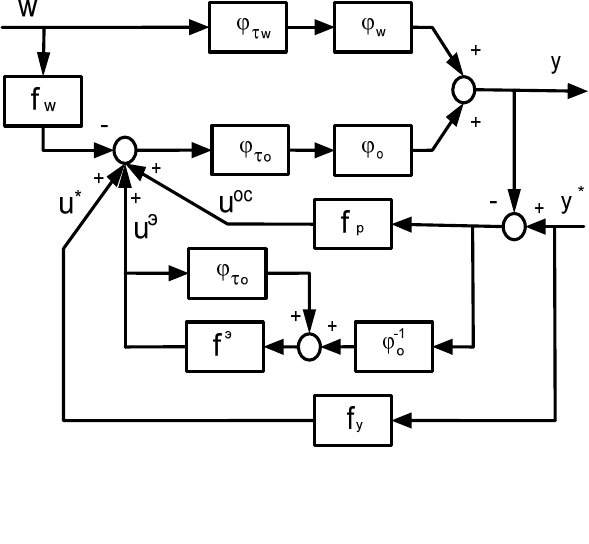
Регулирование по комбинированному принципу. В этом случае при-
сутствует контур регулирования по контролируемым возмущениям
w
f
, кон-
тур компенсации косвенно оцениваемого возмущения
τ
ϕϕ
,,
1−
o
э
f
, контур
регулирования по отклонениям
p
f
и контур реализации задающего воздей-
ствия
y
f
(рисунок 1.35). Представленная структура является в достаточной
степени обобщенной. В конкретных случаях включение или невключение
Рисунок 1.34 – САР по отклонениям
29
контуров в структуру САР определяется свойствами объекта управления и
требованиями, предъявляемыми к качеству регулирования.
Так контур регу-
лирования по контро-
лируемым возмущени-
ям имеет смысл ис-
пользовать при нали-
чии контролируемых
возмущений на входе
объекта управления.
Контур регулирования
с косвенной оценкой
возмущения наиболее
эффективен при нали-
чии существенного за-
паздывания в
канале
регулирования:
1/ >>T
τ
,
где
T,
τ
- соответст-
венно запаздывание и
постоянная времени в канале регулирования и требуемой длительности пере-
ходного процесса два – четыре времени запаздывания. При этом нецелесооб-
разно использовать контур обратной связи, так как запаздывание в канале ре-
гулирования превышает его «память».
1.8. Законы регулирования
При создании конкретной автоматической системы управления объект
задан, то передаточная
функция
)( p
o
ϕ
имеет вполне определенную неиз-
менную форму. Для того, чтобы придать синтезируемой САР желаемых
свойств можно выбирать передаточную функцию регулирующего устройства
p
f
(рисунок 1.34).
Рассмотрим типовые управляющие устройства. В зависимости от вида
преобразования ошибки регулирующие устройства можно подразделить на
три основных типа:
- пропорциональные (П-регуляторы);
- интегральные (И-регуляторы);
- дифференциальные (Д-регуляторы),
а также их сочетания. Например, пропорционально-интегральные (ПИ-
регуляторы), пропорционально-дифференциальные (ПД-регуляторы) и так
далее. Передаточные функции регулирующих устройств имеют
следующий
вид.
Рисунок 1.35 – Комбинированная САР

30
Пропорциональные регуляторы:
pp
kpf =)(
.
В П-регуляторе управляющее воздействие пропорционально ошибке
регулирования
*
yy −=
ε
.
Интегральные регуляторы.
p
k
pf
и
p
=)(
.
В интегральном регуляторе регулирующее воздействие пропорцио-
нально интегралу от ошибки регулирования.
Дифференциальные регуляторы.
pkpf
дp
⋅=)(
.
В дифференциальном регуляторе регулирующее воздействие пропор-
ционально скорости изменения ошибки регулирования.
Пропорционально-интегральные регуляторы.
p
k
kpf
и
pp
+=)(
.
В ПИ-регуляторе регулирующее воздействие формируется как сумма
пропорциональной и интегральной составляющих регулятора.
Вводя кратное интегрирование и дифференцирование можно получить
более сложные законы управления.