Lalanne C. Mechanical Vibrations and Shocks: Mechanical Shock Volume II
Подождите немного. Документ загружается.

184
Mechanical
shock
must
be
lower
or
equal
to the
acceptable maximum force F,^. Knowing
the
total
carriage
mass,
the
relation
[6.55]
allows calculation
of the
possible maximum
acceleration under
the
test conditions:
This limitation
is
represented
on the
abacus
by a
horizontal line
x
m
=
constant;
Figure
6.26. Abacus
of
the
limitations
of
a
shock
machine
-the maximum
free
fall
height
H or the
maximum impact velocity, i.e.
the
velocity change
AV of the
shock pulse.
If V
R
is the
rebound velocity, equal
to a
percentage
a of
the
impact velocity,
we
have
yielding
where
a is a
function
of the
shape
of the
shock
and of the
type
of
programmer used.
In
practice, there
are
losses
of
energy
by friction
during
the
fall
and
especially
in the
programmer during
the
realization
of the
shock.
To
take account
of
these
losses
is
difficult
to
calculate analytically
and so one can
set;
Standard
shock
machines
185
[6.58]
where
P
takes into account
at the
same time
losses
of
energy
and
rebound.
As an
example,
the
manufacturer
of
machine IMPAC
60 x 60
(MRL) gives, according
to
the
type
of
programmers
[IMP]:
Table 6.1.
Loss
coefficient
(3
Programmer
Elastomer
(half-sine pulse)
Lead
(rectangle pulse)
Lead (TPS pulse)
Value
of P
0.556
0.2338
1.544
Figure
6.27.
Drop height necessary
to
obtain
a
given
velocity change
The
limitation related
to the
drop height
can be
represented
by
parallel straight
lines
on a
diagram giving
the
velocity change
AV as a
function
of the
drop height
in
logarithmic
scales.
The
velocity change being,
for all
simple shocks, proportional
to the
product
x
m
T , we
have
186
Mechanical
shock
yielding, while setting
a =
[6.59]
Table 6.2.
Amplitude
x
duration limitation
Waveform
Half-sine
TPS
Rectangle
Programmer
Elastomer
Lead cone
Universal
programmer
Universal programmer
(x
m
T)
(m/s)
v
m
'max
17.7
10.8
7.0
9.2
On
logarithmic
scales
(x
m
,T),
the
limitation relating
to the
velocity change
is
represented
by
parallel inclined straight lines (Figure
6.26).
Limitations
of
programmers
Elastomeric materials
are
used
to
generate shocks
of
-half-sine
shape
(or
versed-sine with
a
conical
frontal
module
to
avoid
the
presence
of
high
frequencies);
- TPS and
rectangular shapes,
in
association with
a
universal programmer.
Elastomer programmers
are
limited
by the
allowable maximum force,
a
function
of
Young's modulus
and
their dimensions (Figure 6.26) [JOU 79]. This limitation
is
in
fact related
to the
need
to
maintain
the
stress lower than
the
yield stress
of
material,
so
that
the
target
can be
regarded
as a
pure
stiffness.
The
maximum
stress
a
max
developed
in the
target
at the
time
of the
shock
can be
expressed
according
to
Young's modulus
E, to the
maximum deformation
x
m
and to the
thickness
h of the
target according
to
with,
for an
impact with perfect rebound,
. It is
necessary that,
if R
e
is
the
elastic ultimate stress
Standard
shock
machines
187
i.e.
Exa
MR1
mple
.
IMP
AC
60 x 60
shock machine
Table
6.3.
Examples
of
the
characteristics
of
half-sine
programmers
Type
Hard
Mean
Soft
Colour
Red
Blue
Green
Maximum force (kN)
Diameter
150.5
mm
667
445
111
Diameter
295 mm
2
224
1201
333
Taking into account
the
mass
of the
carriage assembly, this limitation
can be
transformed
into maximum acceleration
(F
m
= m
x
m
). Thus, without
a
load,
with
a
programmer
made
out of a
hard elastomer
with
diameter
295 mm and a
table mass
of
3000
g, we
have
x
m
« 740
m/s
2
. With
four
programmers used simultaneously,
maximum
acceleration
is
naturally multiplied
by
four.
This
limitation
is
represented
on
the
abacus
of
Figure 6.26
by the
straight lines
of
greater slope.
The
universal programmer
is
limited
[MRL]:
-
by
the
acceptable maximum force;
-by the
stroke
of the
piston:
the
relations established
in the
preceding
paragraphs,
for
each waveform, show that displacement during
the
shock
is
always
proportional
to the
product
x
m
T
(Figure 6.28).
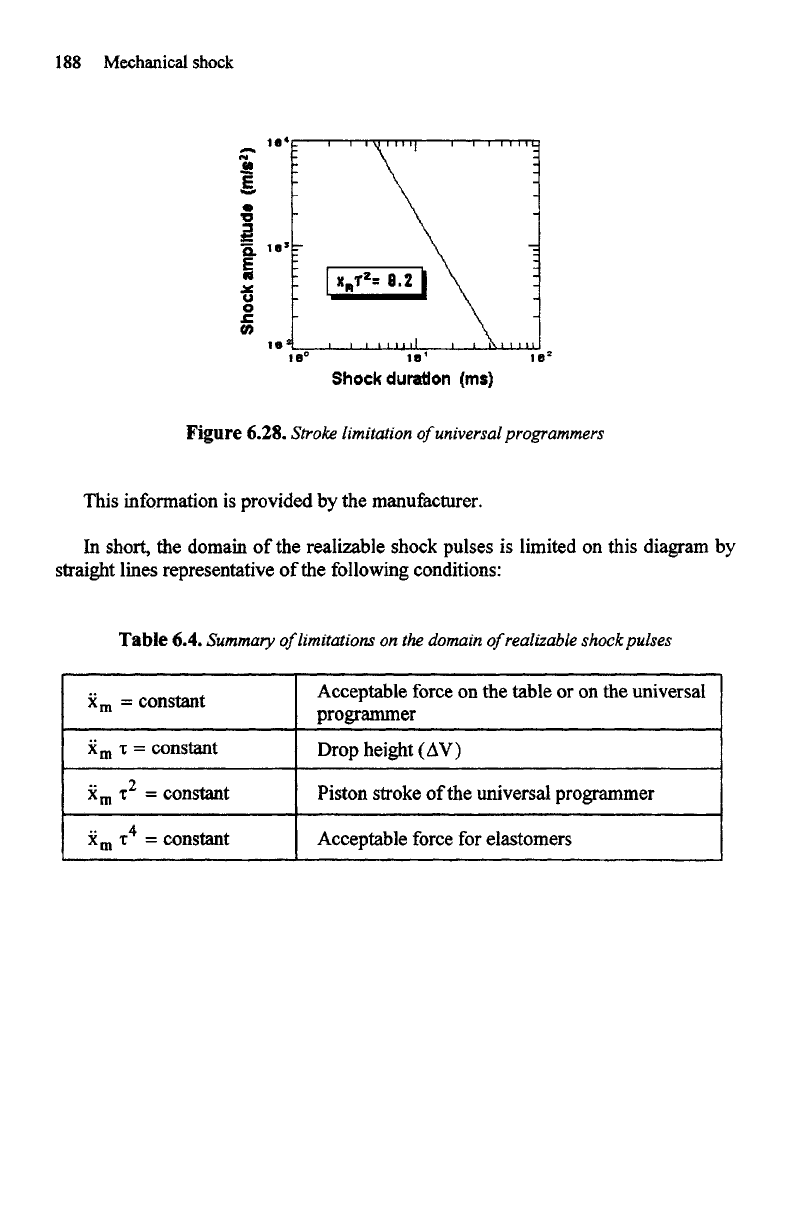
188
Mechanical shock
Figure 6.28.
Stroke limitation
of
universal programmers
This information
is
provided
by the
manufacturer.
In
short,
the
domain
of the
realizable shock pulses
is
limited
on
this diagram
by
straight lines representative
of the
following conditions:
Table 6.4.
Summary
of
limitations
on the
domain
of
realizable shock pulses
x
m
=
constant
x
m
T =
constant
x
m
I
2
=
constant
x
m
t
4
=
constant
Acceptable force
on the
table
or on the
universal
programmer
Drop
height (AV)
Piston stroke
of the
universal programmer
Acceptable force
for
elastomers
(
Chapter
7
Generation
of
shocks using shakers
In
about
the mid
1950s with
the
development
of
electrodynamic exciters
for the
realization
of
vibration tests,
the
need
for a
realization
of
shocks
on
this
facility
was
quickly
felt.
This simulation
on a
shaker, when possible, indeed presents
a
certain
number
of
advantages [COT 66].
7.1. Principle behind
the
generation
of a
simple shape signal versus time
The
objective
is to
carry
out on the
shaker
a
shock
of
simple shape (half-sine,
triangle, rectangle etc)
of
given amplitude
and
duration similar
to
that made
on the
normal shock machines. This technique
was
mainly developed during
the
years
1955-1965 [WEL 61].
The
transfer
function
between
the
electric signal
of the
control applied
to the
coil
and
acceleration
to the
input
of the
test
item
is not
constant.
It is
thus necessary
to
calculate
the
signal
of
control according
to
this
transfer
function
and the
signal
to be
realized.
One of the first
methods used consisted
in
compensating
for the
system using
analogue filters gauged
in
order
to
obtain
a
transfer function equal
to H-1 (Q) (if
H(Q)
is the
transfer
function
of the
shaker-test item unit).
The
compensation must
relate
at the
same time
to the
amplitude
and the
phase [SMA 74a].
One of the
difficulties
of
this approach resides
in the
time
and
work needed
to
compensate
for
the
system, with,
in
addition,
a not
always satisfactory result obtained.
190
Mechanical
shock
The
digital methods seemed
to be
much better.
The
process
is as
follows
[FAV
69], [MAG 71]:
-
measurement
of the
transfer
function
of the
installation (including
the
fixture
and
the
test item) using
a
calibration signal;
-
calculation
of the
Fourier transform
of the
signal specified
at the
input
of the
test item;
- by
division
of
this transform
by the
transfer
function, calculation
of the
Fourier
transform
of the
signal
of
control;
-
calculation
of
the
control signal
vs
time,
by
inverse transformation.
Transfer
function
The
measurement
of the
transfer
function
of the
installation
can be
made using
a
calibration signal
of the
shock type, random vibration
or
sometimes
fast
swept sine
[FAV
74].
In
all
cases,
the
procedure
consists
of
measurement
and
calculation
of the
signal
of
control
to -n dB
(-12,
-9, -6
and/or -3).
The
specified level
is
applied only
after
several adjustments
on a
lower level. These adjustments
are
necessary because
of
the
sensitivity
of the
transfer function
to the
amplitude
of the
signal (non-
linearities).
The
development
can be
carried
out
using
a
dummy item representative
of
the
mass
of the
specimen. However,
and in
particular
if the
mass
of the
test
specimen
is
significant (with respect
to
that
of the
moving element),
it is
definitely
preferable
to use the
real
test
item
or a
model with dynamic behaviour very near
it.
If
random vibration
is
used
as the
calibration signal,
its rms
value
is
calculated
in
order
to be
lower than
the
amplitude
of the
shock (but
not too
distant
in
order
to
avoid
the
effects
of any
non-linearities). This type
of
signal
can
result
in
application
to the
test item
of
many substantial peaks
of
acceleration compared with
the
shock
itself.
7.2. Main
advantages
of the
generation
of
shock using
shakers
The
realization
of the
shocks
on
shakers
has
very interesting advantages:
-
possibility
of
obtaining very diverse shocks shapes;
- use of the
same means
for the
tests
with vibrations
and
shocks,
without
disassembly (saving
of
time)
and
with
the
same fixtures [HAY 63], [WEL 61];
-
possibility
of a
better simulation
of
the
real environment,
in
particular
by
direct
reproduction
of a
signal
of
measured acceleration
(or of a
given shock spectrum);
Generation
of
shocks
using shakers
191
-
better reproducibility than
on the
traditional shock machines;
-
very easy realization
of
the
test
on two
directions
of an
axis;
-
saves using
a
shock machine.
In
practice, however,
one is
rather quickly limited
by the
possibilities
of the
exciters which therefore
do not
make
it
possible
to
generalize
their
use for
shock
simulation.
7.3. Limitations
of
electrodynamic shakers
7.3.1. Mechanical limitations
Electrodynamic shakers have limited performances
in the
following
fields
[MIL
64], [MAG 72]:
- The
maximum stroke
of the
coil-table unit (according
to the
machines being
used,
25.4
or
50.8
mm
peak
to
peak). Motion study
of the
coil-table assembly during
the
usual simple
form
shocks (half-sine, terminal peak
saw
tooth, rectangle) show
that
the
displacement
is
always carried
out the
same side compared with
the
equilibrium position
(rest)
of the
coil.
It is
thus
possible
to
improve
the
performances
for
shock generation
by
shifting
this
rest
position
from the
central
value
towards
one of the
extreme values [CLA
66]
[MIL
64]
[SMA 73].
Figure
7.1.
Displacement
of
the
coil
of
the
shaker
- The
maximum velocity [YOU 64]:
1.5 to 2 m/s in
sine mode
(in
shock,
one can
admit
a
larger velocity with non-transistorized amplifiers (electronic tubes), because
these amplifiers
can
generally accept
a
very short overvoltage). During
the
movement
of the
moving element
in the
air-gap
of the
magnetic coils, there
is an
electromotive force produced which
is
opposed
to the
voltage supply.
The
velocity
must
thus have
a
value such
as
this
emf is
lower than
the
acceptable maximum
192
Mechanical
shock
output
voltage
of the
amplifier.
The
velocity
must
in
addition
be
zero
at the end of
the
shock movement [GAL 73], [SMA 73].
-
Maximum acceleration, related
to the
maximum force.
The
limits
of
velocity, displacement
and
force
are not
affected
by the
mass
of the
specimen.
J.M.
McClanahan
and
J.R. Fagan [CLA
65]
consider that
the
realizable
maxima
shock levels
are
approximately
20%
below
the
vibratory limit levels
in
velocity
and
in
displacement.
The
majority
of the
authors agree that
the
limits
in
force
are,
for the
shocks,
larger than
those
indicated
by the
manufacturer
(in
sine
mode).
The
determination
of the
maximum force
and the
maximum velocity
is
based,
in
vibration,
on
considerations
of
fatigue
of the
shaker mechanical assembly. Since
the
number
of
shocks which
the
shaker
will
carry
out is
very much lower than
the
number
of
cycles
of
vibrations than
it
will undergo during
its
life,
the
parameter
maximum
force
can be, for the
shock applications, increased considerably.
Another
reasoning consist
of
considering
the
acceptable maximum
force,
given
by the
manufacturer
in
random vibration mode, expressed
by its rms
value. Knowing
that,
one can
observe random peaks being able
to
reach
4.5
times this value
(limitation
of
control system),
one can
admit
the
same limitation
in
shock mode.
One
finds
other values
in the
literature, such
as:
- < 4
times
the
maximum force
in
sine mode, with
the
proviso
of not
exceeding
300
g on the
armature assembly [HUG];
-
more than
8
times
the
maximum force
in
sine mode
in
certain cases (very short
shocks,
0.4 ms for
example) [GAL 66]. W.B. Keegan [KEE
73] and
D.J. Dinicola
[DIN
64]
give
a
factor
of
about
10 for the
shocks
of
duration lower than
5 ms.
The
limitation
can
also
be due to:
- The
resonance
of the
moving element
(a
few
thousands
Hertz).
Although
it is
kept
to the
maximum
by
design,
the
resonance
of
this element
can be
excited
in the
presence
of
signals with very short
rise
time.
-The resistance
of the
material. Very great accelerations
can
involve
a
separation
of the
coil
of the
moving component.
Generation
of
shocks
using
shakers
193
7.3.2.
Electronic limitations
1.
Limitation
of the
output voltage
of the
amplifier
[SMA 74a]
which
limits coil
velocity.
2.
Limitation
of the
acceptable maximum current
in the
amplifier,
related
to the
acceptable maximum
force
(i.e. with acceleration).
3.
Limitation
of the
bandwidth
of the
amplifier.
4.
Limitation
in
power, which relates
to the
shock duration (and
the
maximum
displacement)
for a
given mass.
Current
transistor amplifiers make
it
possible
to
increase
the low
frequency
bandwidth,
but do not
handle even short overtensions well
and
thus
are
limited
in
mode shock [MIL 64].
7.4.
The use of the
electrohydraulic
shakers
Shocks
are
realizable
on the
electrohydraulic exciters,
but
with additional
stresses:
-
contrary
to the
case
of the
electrodynamic shakers,
one
cannot obtain
via
these
means shocks
of
amplitude larger than realizable accelerations
in the
steady mode;
- the
hydraulic vibration machines
are in
addition strongly non-linear [FAV 74].
7.5. Pre-
and
post-shocks
7.5.1.
Requirements
The
velocity change shock duration) associated with
shocks
of
simple shape (half-sine, rectangle, terminal peak
saw
tooth etc)
is
different
from
zero.
At the end of the
shock,
the
velocity
of the
table
of the
shaker must
however
be
zero.
It is
thus necessary
to
devise
a
method
to
satisfy
this need.
One
way of
bringing back
the
variation
of
velocity associated with
the
shock
to
zero
can be the
addition
of a
negative acceleration
to the
principal signal
so
that
the
area under
the
pulse
has the
same value
on the
side
of
positive accelerations
and the
side
of
negative accelerations. Various solutions
are
possible
a
priori:
- a
pre-shock alone;
- a
post-shock
alone;