Кузнецов Е.В. Следящие системы электрических регуляторов
Подождите немного. Документ загружается.

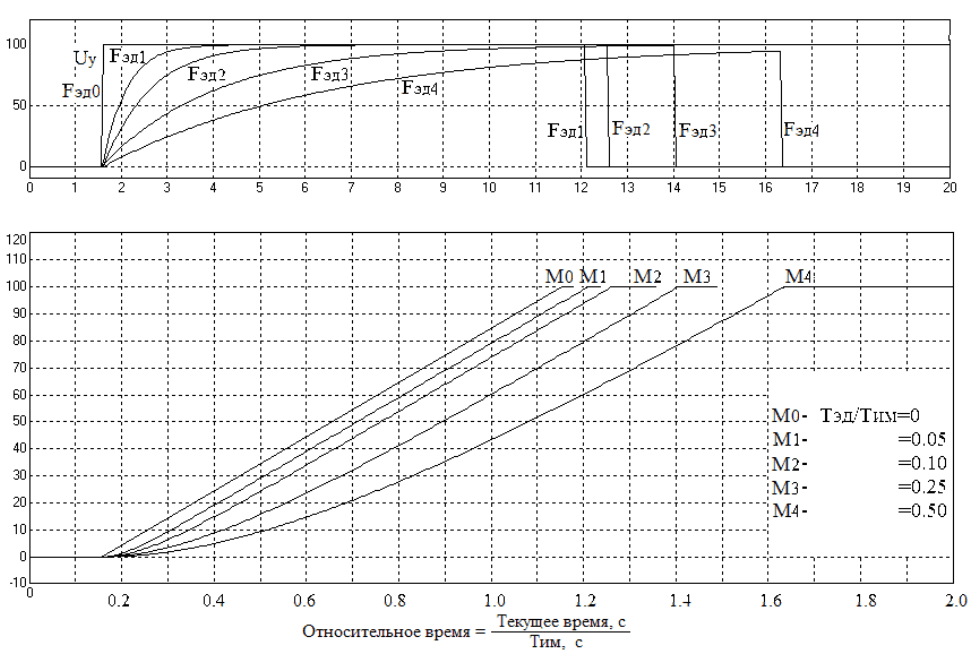
Рис. 5.3 Разгонные характеристики электрических ИМ при различном
отношении Т
эд
/Т
им
.
Если значение Т
эд
пренебрежимо мало по сравнению со значением Т
им
,
так что можно считать Т
эд
≈0, то ИМ становится одноемкостным нейтральным
ОР с разгонной характеристикой М0 на рис. 5.3.
Тогда задача создания следящей системы с хорошими рабочими
свойствами решается достаточно простыми средствами.
Увеличение инерционности электродвигателя (увеличение значения Т
эд
/
Т
им
) вызывает трудности в обеспечении требуемого качества работы следящей
системы.
Уменьшить проявления инерционности ЭД можно посредством контура
регулирования частоты вращения ЭД по схеме, показанной на рис. 1.6.
61
В этом случае этот контур и механическую передачу можно рассматривать
как условный ОР, динамические свойства которого отражаются структурной
схемой, приведенной на рис. 5.4.
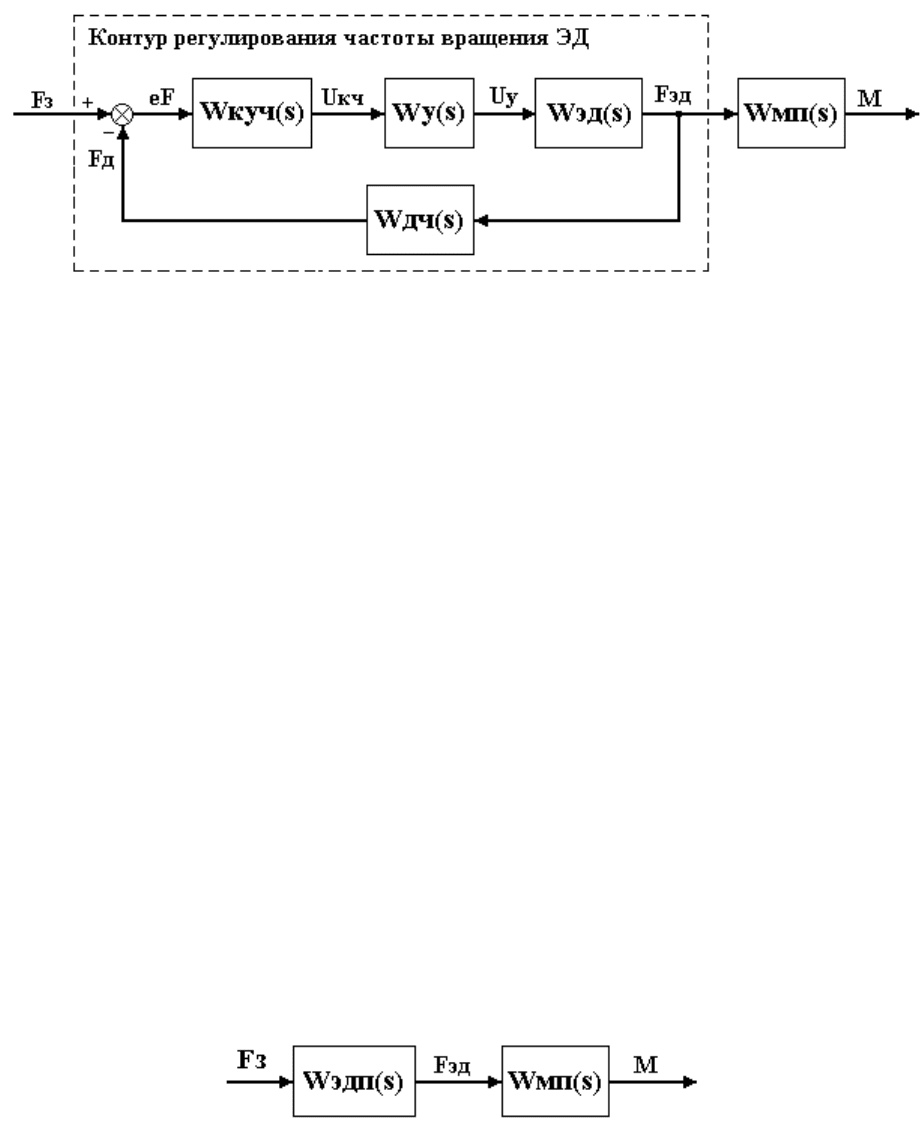
Рис. 5.4 Структурная схема ИМ как приведенного ОР с контуром
регулирования частоты вращения ЭД.
Дополнительно к ранее введенным передаточным функциям на рис. 5.4
обозначены:
Wу(s) – передаточная функция усилителя,
Wдч(s) – передаточная функция датчика частоты вращения электродвигателя,
Wкуч(s) – передаточная функция последовательного корректирующего
устройства контура регулирования частоты вращения ЭД.
Заменив в данной структурной схеме контур на эквивалентное звено,
схему можно преобразовать к виду, показанному на рис. 5.5.
Рис. 5.5 Преобразованная структурная схема ИМ с контуром
регулирования частоты вращения ЭД.
62
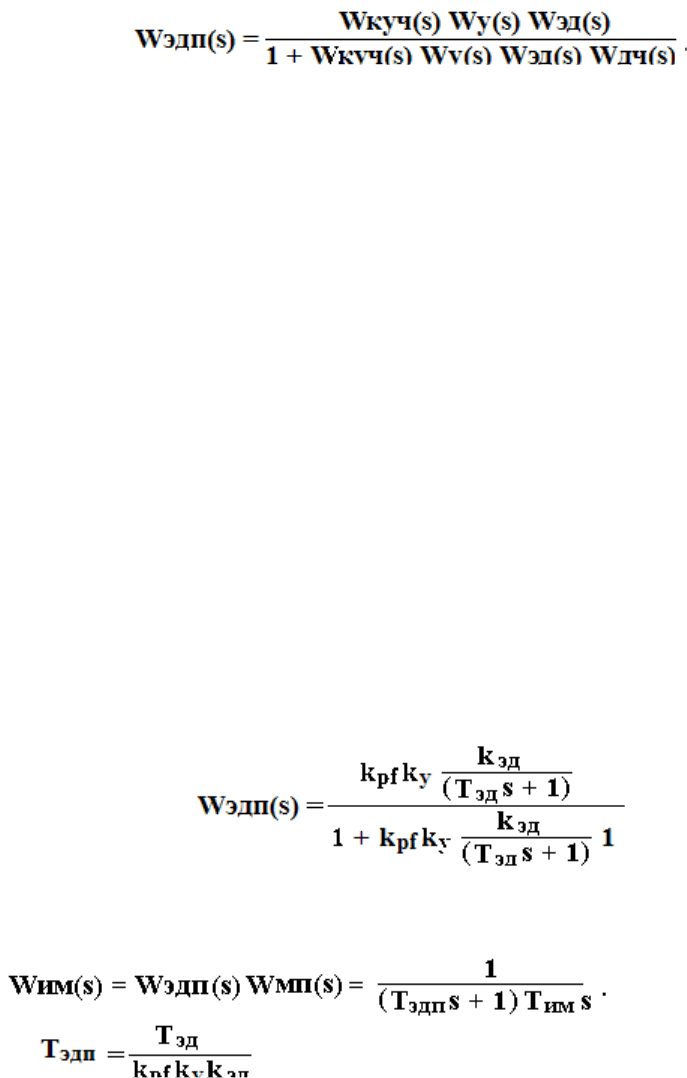
Передаточная функция эквивалентного звена (приведенного
электродвигателя) определится выражением:
(5.1)
При автоматизации судовых ОР в контуре регулирования частоты
вращения ЭД вполне можно использовать пропорциональный закон
регулирования, когда
Wкуч(s) = k
pf
,
где k
pf
– коэффицент пропорциональности.
Кроме того, можно считать, что
Wдч(s) = 1 и Wу(s) = k
у
,
где k
у
– коэффициент усиления усилителя.
После подстановки в выражение (5.1) конкретных передаточных функций
оно примет вид:
или после упрощения
где - приведенная постоянная времени ЭД.
Как правило, произведение k
pf
k
у
k
эд
значительно превосходит 1 и
Т
эдп
< Т
эд
.
Следовательно, контур регулирования частоты вращения ЭД улучшает
динамические свойства ИМ как объекта регулирования.
63
Настроечный параметр контура регулирования частоты вращения ЭД
можно задавать довольно большим, например, k
pf
=100.
В этом случае Т
эдп
≈ 0.01Т
эд
≈ 0, то есть приведенный ЭД становится
практически безинерционным.
Полученный результат справедлив для линейной модели ИМ, тогда как в
реальных регуляторах технические ограничения сигналов не позволят проявить-
ся этому свойству при больших входных воздействиях.
Для иллюстрации влияния ограничения сигналов на динамические
свойства ИМ на рис. 5.6 приведены разгонные характеристики ИМ, полученные
с ограничением и без ограничения сигнала на выходе усилителя.
Из графиков следует, что:
- при неограниченном сигнале усилителя частота вращения ЭД Fэд изменяется
практически скачком вслед за скачкообразным изменением сигнала заданной
частоты вращения ЭД Fз;
- при ограниченном сигнале усилителя частота вращения ЭД Fэд изменяется
по экспоненте с постоянной времени Т
эд
, также как и без контура регулиро-
вания частоты вращения ЭД.
64
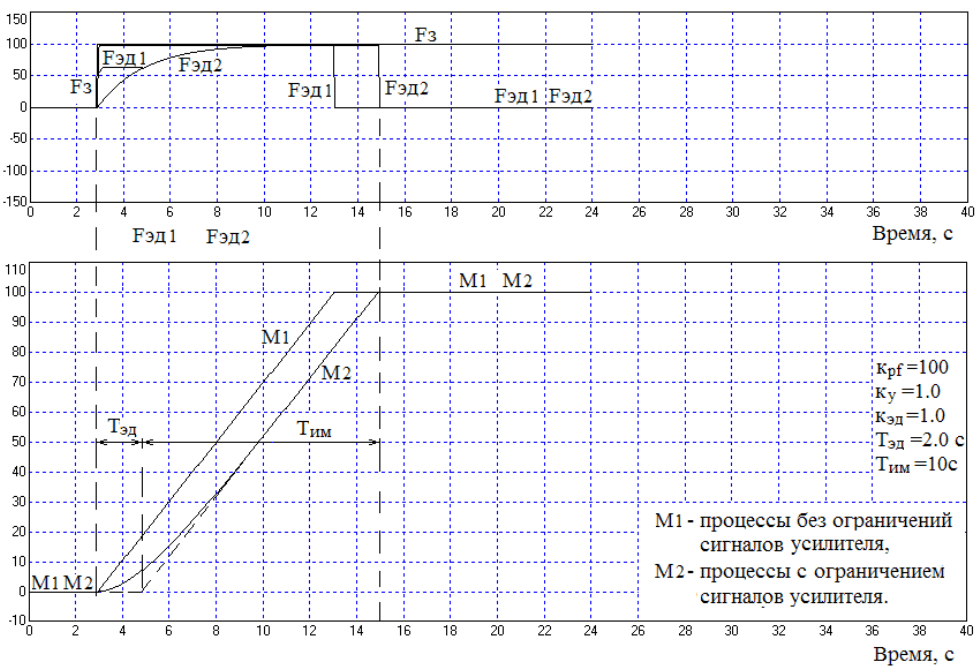
Рис. 5.6 Разгонные характеристики ИМ с контуром регулирования
частоты вращения ЭД.
Тем не менее, при выходе САР в установившиеся состояния, когда сигнал
на выходе усилителя сходит с ограничения, поведение следящей системы
приближается к линейному и контур регулирования частоты вращения ЭД
начнет оказывать положительное влияние.
Это будет показано далее при рассмотрении следящих систем с
переменной скоростью перемещения ИМ.
65
6 СЛЕДЯЩИЕ СИСТЕМЫ С ПОСТОЯННОЙ СКОРОСТЬЮ
ПЕРЕМЕЩЕНИЯ ИМ
Постоянная скорость перемещения ИМ обуславливается применением в
следящей системе асинхронного электродвигателя переменного тока.
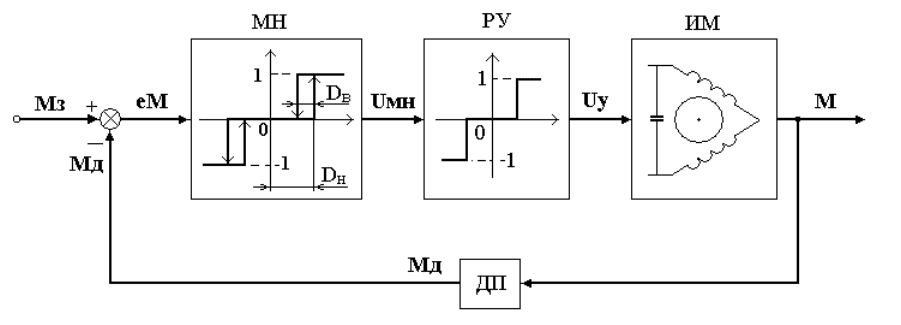
Функциональная схема следящей системы первого типа (рис. 1.2)
применительно к системам с постоянной скоростью перемещения ИМ имеет вид,
представленный на рис. 6.1.
Рис. 6.1 Функциональная схема следящей системы первого типа
с постоянной скоростью перемещения ИМ.
На схеме обозначено:
МН - модуль нечувствительности,
РУ - релейный усилитель.
В рассматриваемой следящей системе:
- усилитель выполняется на тиристорах или транзисторах,
- модуль нечувствительности выполняется на элементах электронной аналого-
вой или микропроцессорной техники.
66
Регуляторы с данной следящей системой являются простыми по
устройству, они достаточно надежны и имеют меньшую стоимость по
сравнению с регуляторами с переменной скоростью ИМ.
Однако:
- наличие зоны нечувствительности создает погрешность следящей системы и,
вследствие этого, погрешность поддержания регулируемой величины;
- в контуре следящей системы возможно появление незатухающих колебаний
положения ИМ, что может привести к поломке ИМ и РО.
Тем не менее, эти регуляторы широко используются в автоматике
судового энергетического оборудования.
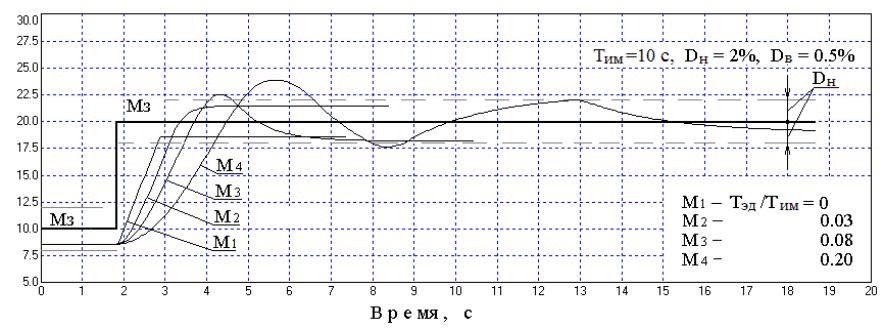
Вид переходных процессов в следящей системе с постоянной скоростью
ИМ, которые приведены на рис. 6.2, зависит от значений Т
эд
/Т
им
, D
н
, D
в
и
может быть:
- монотонным (М1, М2),
- апериодическим (М3),
- колебательным (М4).
Рис. 6.2 Виды переходных процессов в следящей системе с постоянной
скоростью ИМ.
67
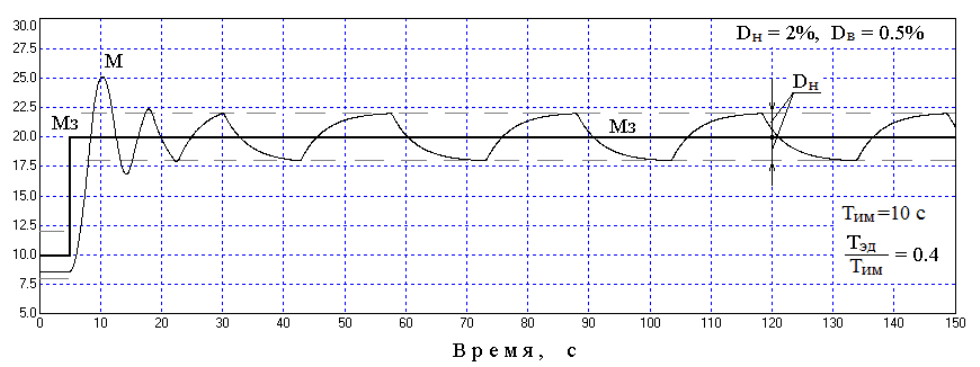
Кроме того, в таких следящих системах возможны незатухающие
колебания с постоянной амплитудой (автоколебания), пример которых
показан на рис. 6.3.
Рис. 6.3 Автоколебания в следящей системе с постоянной
скоростью ИМ.
Автоколебания в следящих системах недопустимы, так как при этом:
- ухудшается качество работы всей системы регулирования,
- динамические механические нагрузки, вызываемые периодическими подачей
и отключением электропитания ЭД, могут привести к поломке механической
передачи.
Настройка данных следящих систем заключается в определении значений
зон D
н
и D
в
, обеспечивающих:
- требуемую точность установки ИМ в заданное положение,
- максимальное быстродействие,
- минимальное перерегулирование 2-3% или отсутствие перерегулирования.
68
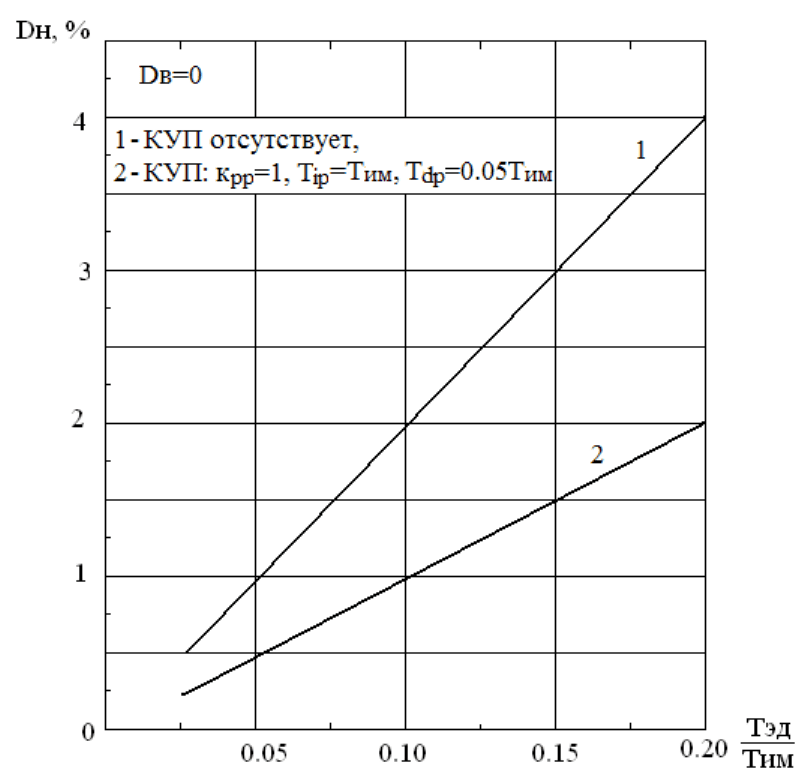
Задача определения минимальной зоны нечувствительности была решена с
использованием компьютерного тренажера системы автоматического
регулирования со следящей системой [9] для скачкообразного изменения сигнала
заданного положения ИМ Мз.
Результаты представлены линией 1 на рис. 6.4, которая показывает
зависимость минимальной допустимой D
н
, обеспечивающей отсутствие
автоколебаний, от отношения Т
эд
/Т
им
.
Рис. 6.4 Минимальная зона нечувствительности для регуляторов с
постоянной скоростью ИМ.
69
В этом случае следящая система будет удовлетворять приведенным выше
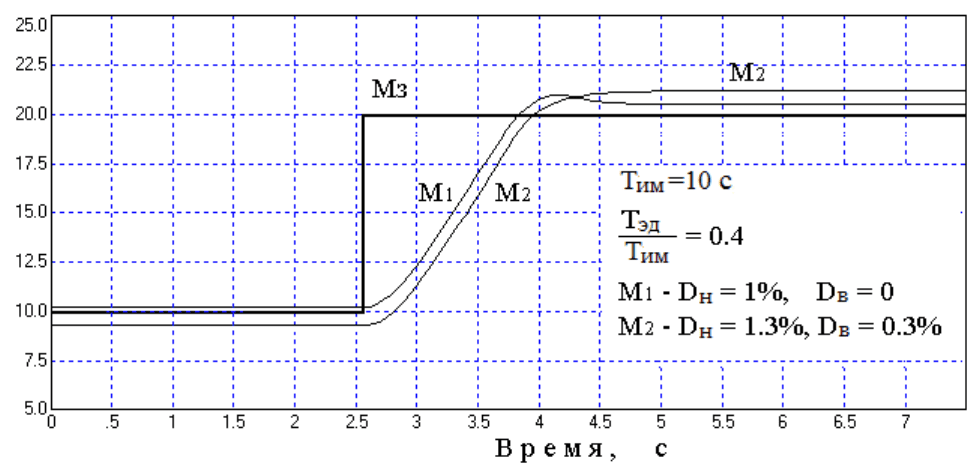
требованиям, что иллюстрируется графиками переходных процессов на рис. 6.5.
Рис. 6.5 Пример переходных процессов в следящей системе с постоянной
скоростью ИМ при минимально допустимой D
н
.
Линия М1 на рис. 6.5 соответствует модулю нечувствительности с зоной
возврата D
в
=0. Если D
в
≠0, то минимальная зона нечувствительности должна
быть увеличена на значение D
в
(см. линию М2 на рис.6.5).
В судовых условиях, когда может оказаться недоступным
экспериментальное определение коэффициентов передаточной функции ИМ,
можно настроить зоны D
н
и D
в
по следующей методике:
- установить D
н
=0 и D
в
=0;
- в следящей системе должны возникнуть автоколебания;
70