Кудояров Р.Г., Дурко Е.М.Методические указания к курсовому проектированию по дисциплине Конструирование мехатронных модулей
Подождите немного. Документ загружается.

модуля с бесступенчатым регулированием частот вращения
шпинделя. Такой привод также необходим для многоцелевого станка
в целях обеспечения его повышенных технологических
возможностей.
Приводы с бесступенчатым регулированием в
распространенных станках с ЧПУ содержат регулируемые
электродвигатели и переборные коробки. В качестве двигателяей
применяются электродвигатели постоянного тока или асинхронные с
частотным регулированием. Переборная коробка в таком приводе
служит для расширения диапазона регулирования частот вращения
шпинделя R
эР
, осуществляемого с постоянной мощностью.
С целью уменьшения количества ступеней переборной коробки
целесообразно применение электродвигателя с увеличенным
диапазоном регулирования R
эР
. В ряде случаев это может
достигаться за счет выбора электродвигателя с повышенной
мощностью. Для такого двигателя при определенной номинальной
частоте вращения соответственно коэффициенту повышения
мощности увеличивается диапазон регулирования R
эР
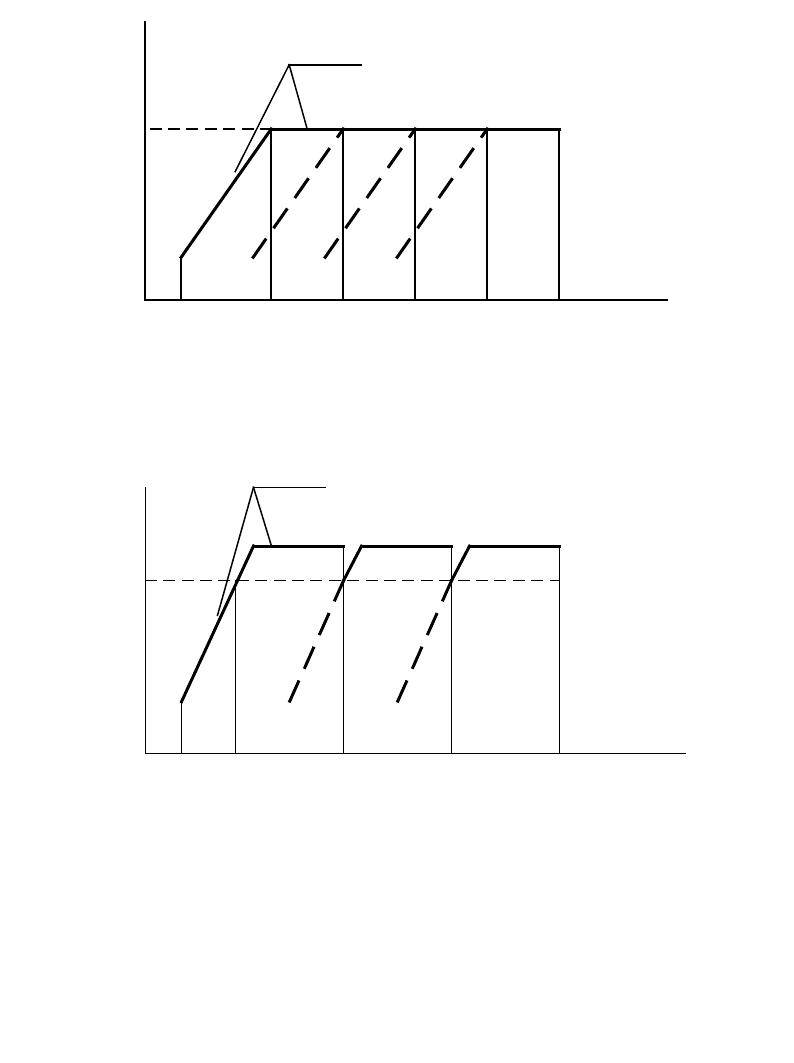
. На рис. 2 в
качества примера приведены графики изменения мощности
электродвигателя и мощности на шпинделе в зависимости от
частоты вращения. Вариант б) отличается от варианта а)
применением электродвигателя с повышенной мощностью и более
простой переборной коробки с меньшим количеством ступеней.
11
n
min
n
1
n
2
n
3
n
4
n
max
n
Р
э
P
шп
P
расч
а)
Р
э
n
min
n
1
n
2
n
3
n
max
n
P
шп
P
расч
б)
Рис. 2. Графики изменения мощности электродвигателя Р
э
и мощности Р
шп
, обеспечиваемой на шпинделе,
при различных частотах вращения:
а) вариант Р
э
= Р
расч
, z = 4;
б) вариант Р
э
> Р
расч
, z = 3
Более рациональное использование диапазона регулирования
R
эР
такого электродвигателя может быть достигнуто, если наряду с
повышением мощности увеличивается номинальная частота
вращения его вала.
В связи с тем, что повышение мощности электродвигателя
может отразиться на увеличении стоимости модуля, выбор варианта
привода должен сопровождаться технико-экономическим
обоснованием.
Разработка кинематической схемы привода главного движения
модуля со ступенчатым регулированием проводится в
последовательности [9]:
- выбор структурной формулы привода;
- составление принципиальной кинематической схемы;
- построение структурной сетки;
- построение графика частот вращения валов;
- расчет частных передаточных отношений ременных и зубча-
тых передач;
- определение диаметров шкивов и чисел зубьев колес;
- проверка кинематического расчета.
При разработке кинематической схемы привода главного
движения модуля с бесступенчатым регулированием частот
вращения шпинделя необходимо предварительно определить
параметры переборной коробки – знаменатель регулирования
пк
и
12
количество ступеней частот вращения z
пк
, а также уточнить
используемые наибольшую и наименьшую частоты вращения вала
электродвигателя [7, 9].
Выбор варианта структурной формулы привода следует
проводить с учетом использования методов улучшения кинематики
приводов станков, предусматривающих применение коробок со
сложенной структурой, с частичным совпадением скоростей и со
связанными зубчатыми колесами [1, 7, 9]. Для предварительно
определенных вариантов структурных формул нужно построить
принципиальные кинематические схемы, структурные сетки и
графики частот вращения валов. На основании этого определяются
обобщенные показатели вариантов привода и осуществляется выбор
рационального варианта.
7. Пример разработки кинематической схемы модуля
привода главного движения с бесступенчатым
регулированием частот вращения шпинделя
7.1. Определение исходных данных
Исходные данные определяются на основании предыдущего
материала. Например:
- тип проектируемого мехатронного станка – токарный с ЧПУ;
- диапазон регулирования привода R
n
= 250;
- наибольшая частота вращения шпинделя n
max
= 2500 об/мин;
- регулирование частот вращения шпинделя - бесступенчатое;
- номинальная и наибольшая частоты вращения электродвигате-
ля n
эном
= 1000 об/мин, n
эmax
= 3500 об/мин;
- компоновка модуля - с встроенным приводом.
Разработка кинематической схемы модуля ведется с учетом
рекомендаций [1, 7, 8, 9].
7.2. Определение знаменателя ряда частот вращения и
числа
ступеней для переборной коробки
13

Для отсутствия разрывов при регулировании частот вращения
шпинделя необходимо обеспечить выполнение условия
пк
R
эР
(не менее, чем на 5 %), (1)
где
пк
- знаменатель ряда частот вращения, обеспечиваемых пере-
борной коробкой;
R
эР
– диапазон регулирования частот вращения вала
электродвигателя
с постоянной мощностью.
Вначале определяются диапазоны регулирования частот
вращения шпинделя с постоянной мощностью R
nР
и с постоянным
моментом R
nT
. Они находятся с учетом степенных зависимостей,
рекомендуемых для конкретных типов проектируемых станков [7, 9]
b
b
nnP
RR
1
, (2)
b
nnT
RR
1
, (3)
где R
n
=
min
max
n
n
, b = 4 для токарных, фрезерных и многоцелевых стан-
ков, b = 3 для сверлильных и расточных станков.
При этом
nTnPn
RRR
(4)
Для рассматриваемого примера при b = 4 диапазоны
регулирования имеют значения: R
nР
= 62,8; R
nT
= 3,98.
Вначале знаменатель ряда
пк
принимается с учетом диапазона
регулирования частот вращения вала электродвигателя,
осуществля-
емых c постоянной мощностью
пк
= 0,95 R
эР
, (5)
где
эном
maxэ
э
n
n
R
P
, для выбранного электродвигателя R
эР
= 3,5,
пк
= 3,32.
Расчетное число ступеней переборной коробки z
пк
определяется
по формуле
пк
n
пк
lg
lg
P
R
z
. (6)
Для рассматриваемого примера z
пк
= 3,5. Это значение
округляется в большую сторону и принимается равным 4.
14
Значение знаменателя ряда частот вращения уточняется с
учетом принятого числа ступеней переборной коробки по формуле
пк
ппк
z
P
R
. (7)
Для рассматриваемого примера
пк
= 2,81. При уточнении данного
знаменателя выдерживаются условия (1) и
m
стпк
, где
ст
- значение
знаменателя стандартного ряда чисел [25], m – целое число. В
данном случае
пк
= 1,4
3
= 2,8.
Диапазоны регулирования привода уточняются с учетом
принятого значения знаменателя
пк
пк
'
z
nP
R
, (7)
'
'
n
nP
n
T
R
R
R
. (8)
Для рассматриваемого примера
'
np
R
= 61,2,
'
nT
R
= 4,09.
7.3. Уточнение используемых значений частот вращения
вала электродвигателя
Значения наибольшей и наименьшей частот вращения вала
электродвигателя уточняются по формулам
maxпкном
'
max
02,0 nnn
ээ
, (9)
'
эном
'
min
nT
э
R
n
n
. (10)
При этом значение наибольшей частоты вращения шпинделя
может быть уточнено по формуле
пк
пкp
'
max
02,1
z
nn
, (11)
где n
p
– расчетная частота вращения шпинделя,
'
эminp Т
Rnn
.
Для рассматриваемого примера
'
minэ
n
= 245 об/мин,
'
maxэ
n
= 2830
об/ мин, n
р
= 40 об/мин, n
’
max
= 2515 об/мин.
7.4. Определение характерных значений частот вращения
шпинделя
Эти значения находятся с целью построения графика частот
вращения валов. Наименьшая частота вращения n
min
принимается
соответственно исходным данным, частоты вращения в диапазоне n
1
n
z
определяются по геометрическому ряду со знаменателем
пк
,
15

при этом n
1
= n
p
, наибольшая частота n
‘
max
определяется по формуле
(11).
Данные частоты вращения округляются до ближайших
стандартных значений, которые учитываются в последующих
расчетах. Для рассматриваемого примера характерные значения
частот вращения шпинделя составляют: 10; 40; 112; 315; 900; 2500
об/мин.
7.5. Выбор варианта структурной формулы привода
и выполнение отдельных этапов разработки
кинематической схемы
Для принятой компоновки модуля со встроенным приводом
определяются варианты структурной формулы. В рассматриваемом
случае возможны варианты: c нормальной множительной структурой
(вариант 1), со сложенной структурой, включающей две
дополнительные структуры (вариант 2), а также другие.
Отобранные для анализа варианты должны отвечать принципам
обеспечения наименьших габаритов привода: количество передач в
группе P
i
= 2 или 3; конструктивный порядок - с учетом условия
...
321
PPP
P
n
, где P
1
– количество передач в первой
конструктивной группе, P
2
– во второй группе и т. д.;
кинематический порядок групп передач - последовательный (при
отсутствии двух связанных колес), при этом х
1
х
2
х
3
… х
n
, где х
1
– характеристика первой конструктивной группы передач, х
2
–
второй группы и т.д.
Структурные формулы привода модуля для рассматриваемого
примера:
по варианту 1
1 2
11
2
22
= 4, (12)
где первый индекс означает конструктивный порядок группы пере
дач, второй индекс – кинематический порядок;
по варианту 2
1 2
11
·(1 + 1 1) = 4. (13)
С целью подробной оценки вариантов составляются
принципиальные кинематические схемы привода, структурные сетки
и графики частот вращения валов (ниже показано для приведенных
вариантов, см. рис. 3 8).
16
Построение графиков частот вращения валов для обеспечения
наименьших габаритов привода должно производиться с
выполнением условий: 2 i
i
0,25; i
min1
i
min2
i
min3
…
; n
i
n
max
или n
э max
(при n
э max
n
max
), где i
i
– частное передаточное
отношение (желательно обеспечивать отсутствие предельно
допустимых величин); i
min1
- наименьшее частное передаточное
отношение первой конструктивной группы передач; i
min2
- второй
конструктивной группы и т.д.; n
i
– частота вращения
промежуточного вала.
Для вариантов кинематики привода определяются обобщенные
показатели, к которым относятся: к
в
- количество валов; к
зк
-
зубчатых колес; к
пб
- передвижных блоков; к
м
– муфт; к
кц
- передач
короткой цепи и к
с
- обеспечиваемых скоростей этой цепью; B -
осевые габариты. Также находится
max
- наибольший возможный
знаменатель регулирования частот вращения шпинделя,
обеспечиваемый коробкой передач по условию ограничения частных
передаточных отношений передач
25,02
i
i
.
Анализ показывает (табл.1), что для рассматриваемого примера
целесообразно применение привода с кинематикой по варианту 1,
который отличается рядом лучших показателей по сравнению с
вариантом 2.
17
пк
Вал эл.
n
4
i
4
n
3
i
2
n
o
i
p
i
1
n
2
i
3
n
1
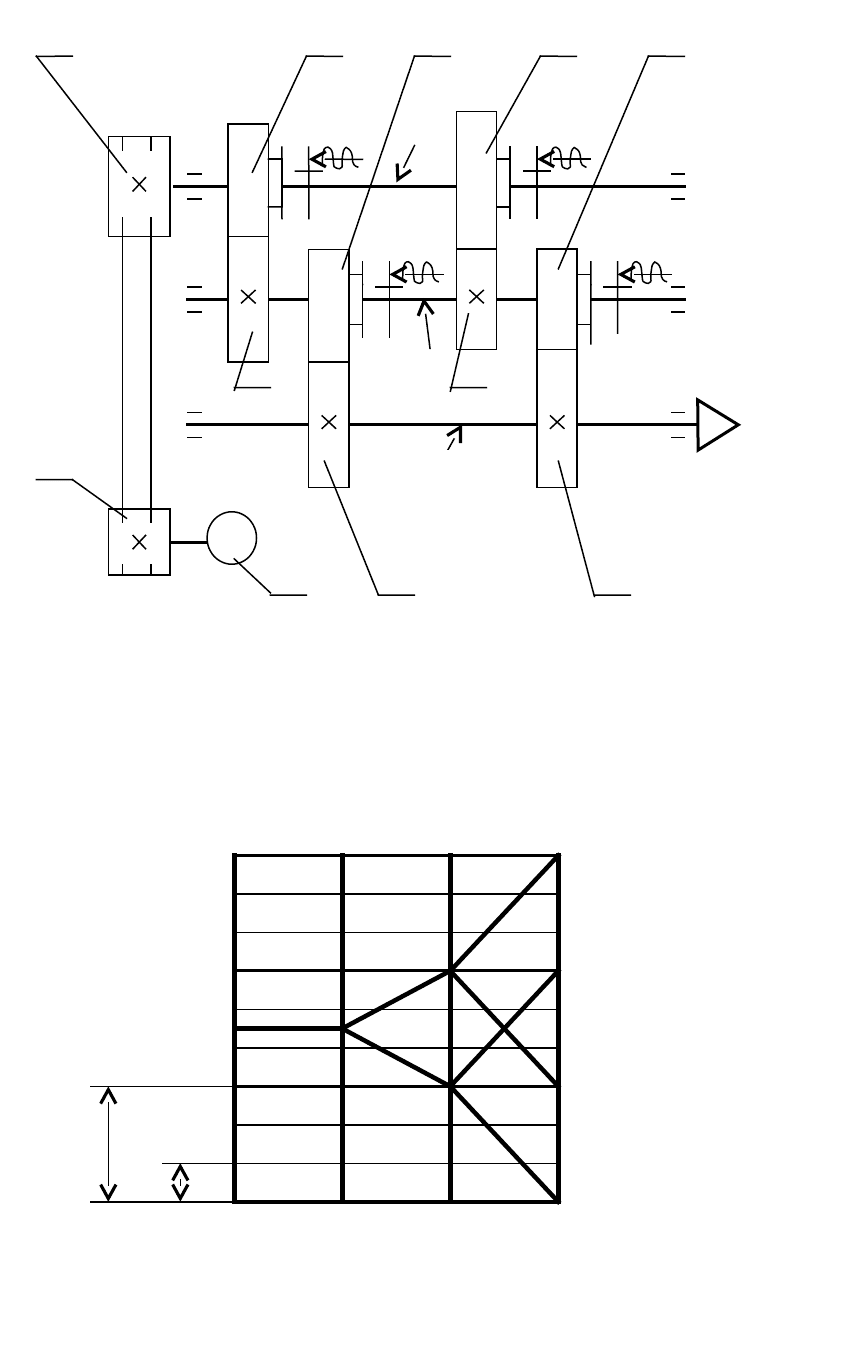
Рис. 4. К анализу варианта 1. Cтруктурная сетка
привода модуля главного движения
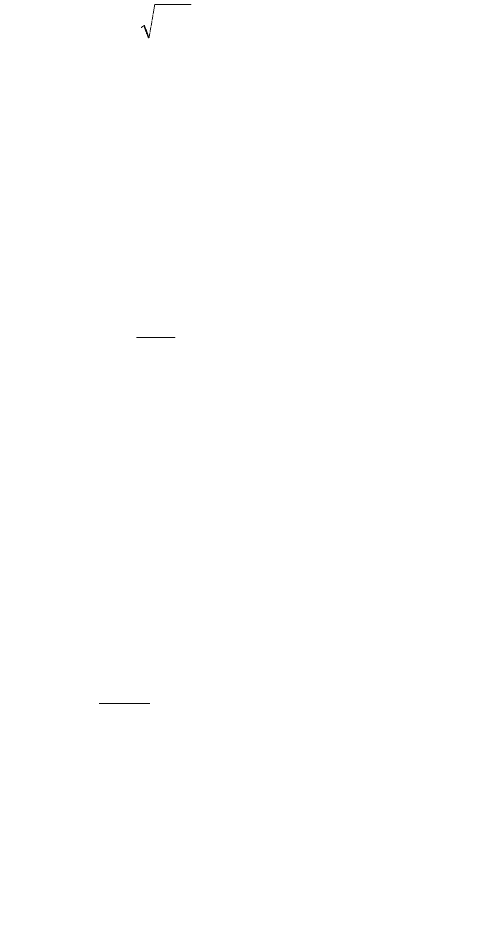
Рис. 3. К анализу варианта 1. Принципиальная кинематическая
схема привода модуля главного движения
5 II 9
3 4 6 8 10
ЭМ
1
I ЭМ
2
ЭМ
3
ЭМ
4
2
1 7 11
III
18
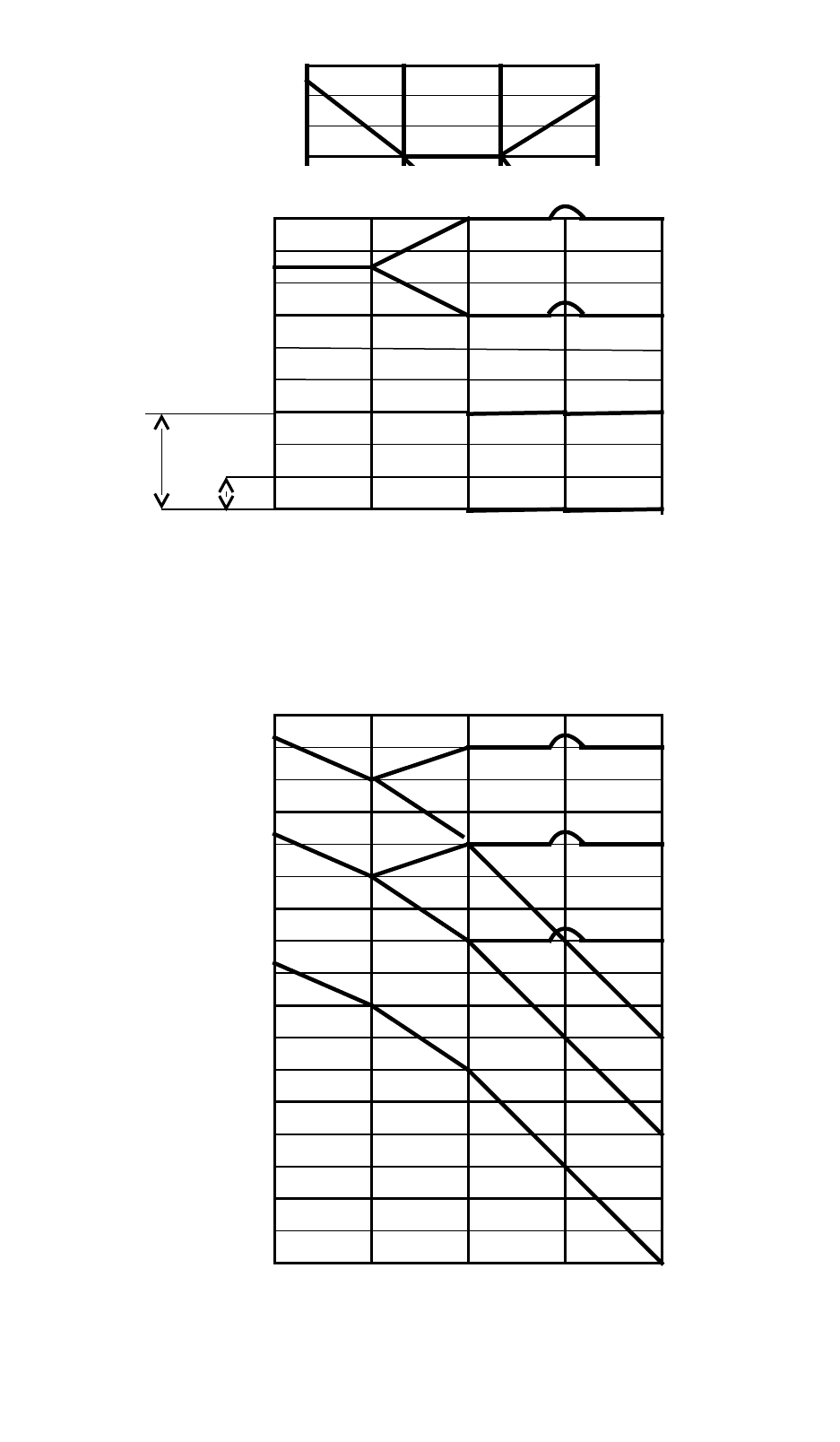
Рис. 6. К анализу варианта 2. Принципиальная кинематическая
схема привода модуля главного движения
ЭМ
1
ЭМ
2
8
9
10
11
5 7
3 4 6 12
2
1 1 13
Вал эл.
n
эmax
=
2860 об/мин 2500
n
эmax
=
1000 об/мин 900
i
p
i
2
i
4
n
эном
= 315
245 об/мин i
1
112
i
3
40
10 об/
мин
Рис. 5. К анализу варианта 1. График частот
вращения валов привода модуля главного движения
пк
Вал эл.
n
0
i
2
i
p1
i
1
i
3
i
4
i
5
Рис. 7. К анализу варианта 2. Cтруктурная сетка
привода модуля главного движения
n
4
n
3
n
2
n
1
Вал эл.
n
эmax
=
2860 об/мин
n
эном
=
1000 об/мин
i
p1
i
2
i
3
i
1
n
эmin
=
245 об/мин i
4
i
5
Рис. 8. К анализу варианта 2. График частот вращения
валов привода модуля главного движения
2500
900
315
112
40
10 об/мин
18
К некоторым недостаткам этого варианта относится
использование предельно допустимых частных передаточных
отношений передач, что может отразиться на повышенных
Вал эл.
n
эmax
=
2860 об/мин
n
эном
=
1000 об/мин
i
p1
i
2
i
3
i
1
n
эmin
=
245 об/мин i
4
i
5
19